带相关噪声和不完全丢包系统的最优线性滤波
2019-06-18余永龙陆海霞费绍金王福章
余永龙,陆海霞,费绍金,王福章
带相关噪声和不完全丢包系统的最优线性滤波
余永龙1,陆海霞1,费绍金1,王福章2
(1. 宿迁学院 文理学院,江苏 宿迁 223800;2. 淮北师范大学 数学科学学院,安徽 淮北 235000)
研究了具有不同源噪声和不确定观测信息的离散随机系统的最优线性滤波问题。不同源噪声指乘性噪声、纵向相关噪声和有限步自相关过程噪声。不确定观测信息包括了一步随机时滞和不完全丢包。由Kronecker delta函数刻画有限步自相关过程噪声,采用一组已知统计特性的Bernoulli分布变量来描述数据传输过程中存在的一步随机时滞和不完全丢包现象,基于最优估计的定义,在最小均方误差意义下设计出最优线性滤波,借助算例仿真验证了算法的有效性。
最优线性滤波;不确定系统;相关噪声;不完全丢包
随着网络化的广泛应用,网络化控制系统(networked control systems,NCSs)的状态估计问题得到了广大学者的关注[1-3]。与传统控制系统相比,NCSs具有信息传输快速、信息交互范围广等优点。但是由于黑客,噪声干扰等原因,数据在传输过程中,不可能完全及时传送到接收端,经常会出现时滞、丢包、衰减、乘性噪声、相关噪声等现象,故对具有这类现象的NCSs进行滤波器的设计具有重要的现实意义。
近来,针对具有自相关噪声、丢包、时滞的NCSs的滤波问题已有诸多报道[4-6]。由于连续系统离散化,导致NCSs噪声经常是有限步相关的,文献[7]给出了带有限步自相关测量噪声系统的鲁棒非脆弱Kalman型递推滤波问题。文献[8]研究了有限步自相关噪声系统的全局最优Kalman滤波,这类滤波具有更高的精度。值得注意的,带有限步自相关噪声系统的状态估计问题总是很复杂但又不可回避。除了带有有限步自相关噪声外,具有数据丢包、时滞和乘性噪声的NCSs的滤波问题也得到广泛关注。文献[9]用两组满足Bernoulli分布的随机变量来描述可能发生一步随机时滞和多丢包的网络控制系统,并给出了其最优线性估计。文献[10]将一步时滞推广到步时滞,进而研究具有多步时滞系统的最优线性估值器。为了使模型更加贴近实际系统,不确定观测信息尽可能多的被描述在系统模型中。文献[11]在2017年率先提出在黑客攻击下,网络化系统的建立及状态估计。文献[12]研究了在Round-Robin协议下,网络化离散随机系统的状态估计问题。
目前,在研究的NCSs中,若出现数据丢包就完全丢包,接收端接受不到任何状态信息[13],而在实际系统中,接收端是有可能接受部分状态信息的。另外,同时具有有限步自相关噪声、纵向相关噪声、丢包和时滞系统的最优线性滤波问题还鲜见报道。本文将文献[14]中系统的一步自相关噪声推广成有限步自相关噪声,并考虑带有不完全丢包,即研究同时具有乘性噪声、有限步自相关过程噪声、纵向相关噪声、一步随机时滞和不完全丢包的复杂系统的最优线性滤波。通过对原系统进行状态增广,基于最优估计的定义,利用递推射影理论,给出最优线性滤波器。最后,通过算例仿真验证最优线性滤波的有效性。所设计的滤波器虽然利用状态增广法,但与文献[14]相比,降低了增广状态的维数,减少了相关性分析,避免了更复杂的计算。
1 问题的阐述
考虑如下带有乘性噪声、有限步自相关过程噪声、纵向相关噪声、不完全丢包和一步随机时滞的NCSs:




将系统(1)-(3)扩维为如下系统:

其中,

过程噪声w和观测噪声n满足如下性质:

其中,
为了便于讨论,引入以下参量:

易证:

进一步将增广系统(6)-(7)改写为以下形式:

原始系统和增广系统存在关系:
因此,仅需给出增广系统(6)-(7)或(11)-(12)的最优线性滤波。
2 最优线性滤波
2.1 预备引理

证明 将(6)式代入
有(16)式成立。

其中,


则有

于是
综上得到式(17)。

式(18)成立。

则
则



于是

为便于讨论,介绍如下定义:
定义2







注3 由定义1,易见定义2,并且
引理4[8]对如下适当维数的分块矩阵
是可逆的,并且

引理5 由定义2,如下结果成立

因此,有

将式(11)代入F-1的定义中,有
为得到上式,以下两个式子将被用到。
一方面,不断使用引理4,注意到
则
另一方面,反复使用引理4,注意到
有
综上,并注意到

2.2 最优线性滤波
定理1 对系统(11)-(12),有如下最优线性滤波





证明 第一,由定义1和引理4,最优线性滤波可由下式给出
即式(34)成立。
向式(11)两边在由Y生成的线性空间上取射影,有
将式(41)代入式(42),可得式(35)。

因此得到了式(36)。
式(37)被得到。
式(38)被得到。

有
得到了式(39)。
有
式(40)成立。证毕。
3 仿真实例
考虑离散线性随机系统(1)~(3),设

设0=0.15,1=0.1,2=0.15,3=0.2,0=0.15,这样过程噪声就是三步自相关并且与测量噪声纵向相关。
设
图1 及其估计的轨迹
图2 及其估计的轨迹
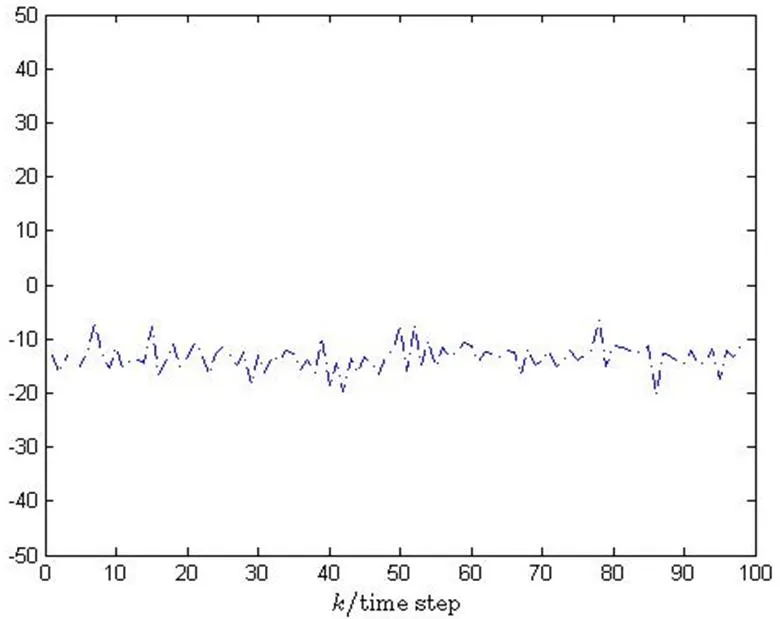
图3
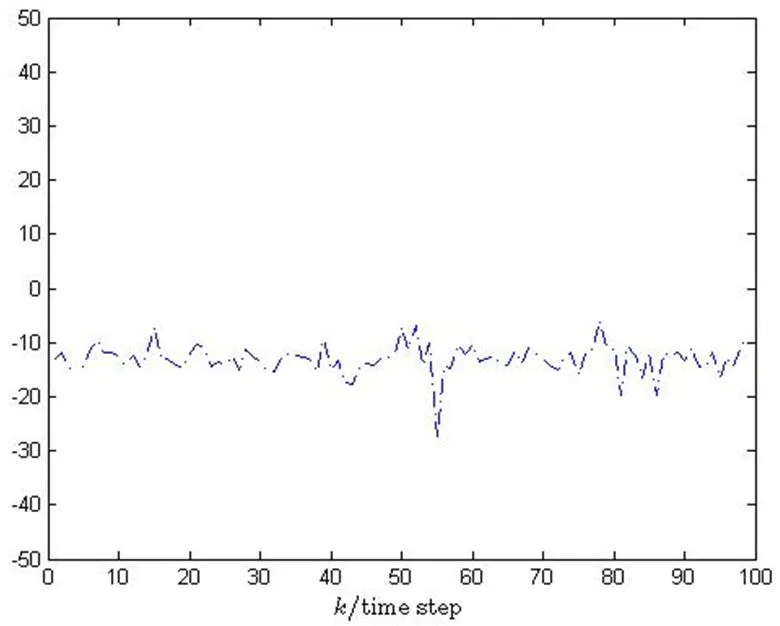
图4
利用定理1,在原则下构造最优线性滤波,所得结果如图1、图2、图3及图4所示。由图1-图4可知,最优线性滤波有很好的性能。
4 结论
本文研究了同时具有乘性噪声、有限步自相关过程噪声、纵向相关噪声、一步随机时滞和不完全丢包系统的最优线性滤波。利用已知统计特性且相互独立的Bernoulli分布变量描述一步随机时滞和不完全丢包现象。引入新的中间变量,基于增广方法和射影理论,给出了新的最优线性滤波。利用算例仿真,验证了滤波的有效性。
[1] Kalman R E. A new approach to linear filtering and prediction problems[J]. Transactions of the ASME Journal of the Basic Engineering, 1960, 82(1): 35-45.
[2] Zhang Yan, Wang Shafei, Li Jicheng. Improved particle filtering techniques based on generalized interactive genetic algorithm[J]. Journal of Systems Engineering and Electronics, 2016, 27(1): 242-250.
[3] 祁波,孙书利.带未知通信干扰和丢包补偿的多传感器网络化不确定系统的分布式融合滤波[J].自动化学报, 2017,43(1):1-8.
[4] Zhang Shuo, Zhao Yan, Li Min, et al. Optimal filtering for uncertain systems with stochastic nonlinearities, correlated noises and missing measurements[J]. Journal of Systems Engineering and Electronics, 2015, 26(5): 1052-1059.
[5] Lin Honglei, Sun Shuli. Distributed fusion estimation for multi-sensor asynchronous sampling systems with correlated noises[J]. International Journal of Systems Science, 2017, 48(5): 952-960.
[6] Ma Jing, Sun Shuli. Optimal linear estimators for muti-sensor stochastic uncertain systems with packet losses of both sides[J]. Digital Signal Processing, 2014, 37(2): 24-34.
[7] Feng Jianxin, Wang Zidong, Zeng Ming. Optimal robust non-fragile Kalman-type recursive filtering with finite-step autocorrelated noises and multiple packet dropouts[J]. Aerospace Science and Technology, 2010, 15(6): 486-494.
[8] Li Fan, Zhou Jie, Wu Du-Zhi. Optimal filtering for systems with finite-step autocorrelated noises and multiple packet dropouts[J]. Aerospace Science and Technology, 2013, 24(1): 255-263.
[9] Sun Shu-Li. Optimal linear estimation for networked systems with one-step random delays and multiple packet dropouts[J]. Acta Automatica Sinica, 2012, 38(3): 349-356.
[10] 王欣,孙书利.带相关噪声,随机观测滞后和丢失的随机不确定系统的最优线性估值器[J].控制理论与应用,2017,34(5):609-618.
[11] Hu Liang, Wang Zidong, Han Qinglong, et al. State estimation under false data injection attacks: Security analysis and system protection[J]. Automatica, 2017, 87(5): 176-183.
[12] Zou Lei, Wang Zidong, Gao Huijun, et al. State estimation for discrete-time dynamical networks with time-varying delays and stochastic disturbances under the Round-Robin Protocol[J]. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(4): 1139-1151.
[13] Wang Xin, Sun Shuli. Optimal recursive estimation for networked descriptor systems with packet dropouts, multiplicative noises and correlated noises[J]. Aerospace Science and Technology, 2016, 63(2): 41- 53.
[14] Yu Yonglong, Chen Dongyan. Globally Optimal Kalman Filtering with Correlated Noises, Random One-Step Sensor Delay and Multiple Packet Dropouts [A]. Proceedings of the 34rd Chinese Control Conference[C].Hangzhou:Technical Committee on Control Theory, Chinese Association of Automation, 2015: 6709-6714.
Optimal Linear Filtering for Systems with Correlated Noises and Incomplete Packet Dropouts
YU Yong-long1, LU Hai-xia1, FEI Shao-jin1, WANG Fu-zhang2
(1. School of Literature and Science, Suqian College, Suqian 223800, China; 2. School of Mathematical Sciences, Huaibei Normal University, Huaibei 235000, China)
Optimal linear filtering problems are studied for discrete stochastic systems with noises from different sources and uncertain measurements. The multiplicative noises, cross-correlated noises and finite-step auto-correlated process noises are included in the different sources noises. The uncertain measurements contain the random one-step sensor delay and incomplete packet dropouts. Finite-step auto-correlated process noises are described by Kronecker delta functions, and a group of Bernoulli distributed random variables with known conditional probabilities are employed to describe the phenomena of the random one-step sensor delay and incomplete packet dropouts during the data transmission process. Based on the definition of optimal estimation, the optimal linear filtering are designed in the sense of minimum mean square error. Finally, a simulation example is given to verify the effectiveness of the proposed algorithms.
optimal linear filtering; uncertain systems; correlated noises; incomplete packet dropouts
O231.1
A
1009-9115(2019)03-0027-08
10.3969/j.issn.1009-9115.2019.03.008
江苏省高等学校自然科学研究面上项目(18KJB180027),江苏省第三次全国农业普查研究课题(N27),安徽省教育厅高等学校省级质量工程项目(2017JXTD146),宿迁学院科研基金重点项目(2016KY02)。
2018-09-02
2019-03-17
余永龙(1990-),男,安徽桐城人,硕士,助教,研究方向为复杂网络化控制系统的状态估计。
(责任编辑、校对:赵光峰)