基于MATLAB的港口起重机无环流可逆调速系统研究
2019-06-13张智华乔梓丰
徐 勇,龚 旭,张智华,乔梓丰
(南通航运职业技术学院 交通工程系,江苏 南通 226010)
0 引 言
随着互联网+、物联网等高新技术在港口机械控制中得到了创新应用,港口机械控制自动化程度得到了进一步的提高,港口正朝着“智慧港口”方向发展。在港口企业生产中,电动轮胎吊作为主要的作业设备,在流动作业中起着重要作用。而其采用的是电机拖动,电机驱动机械机构运行, 来完成起升、旋转等作业动作, 这些作业动作是由电机、控制调速装置和一些机械传动装置组成一个系统来完成的。随着智慧港口发展的需要,对调速控制系统的要求越来越高,调速控制系统主要通过控制电机从而来控制电机转速,通过改变电机的工作参数等方法来改变电机的机械特性,使电机的稳定运转速度、转矩发生变化,从而到达调节生产设备的机械特性,从而满足不同工况的生产需求[1-2]。
为了对电动轮胎吊的交直流调速系统进行研究,我们设计为由一台交流电机和一台直流电机连轴构成电机组组成实验系装置,分别作为加载电机和驱动电机使用。加载电机可以模拟现场负载对驱动电机进行加载,从而可以模拟不同负载下电机的运行情况。将无环流可逆调速系统作为直流电机调速装置的设计原型,利用MATLAB/SIMULINK对其进行了建模和仿真分析,通过试验来研究不同工况对调速系统的要求。
1 直流电机可逆调速系统
为了满足电动轮胎吊作业要求,一方面要求电动机能正转和反转,并且在起升和下降过程中,减速时能产生制动转矩,加快制动时间,我们设计了一个无环可逆的调速系统。无环可逆直流调速原理见图1。
无环流可逆系统不需配置限环流电抗器,其通过逻辑控制来控制正组和反组三相可控整流桥的工作与关闭,从而保证在同一时刻只有一组桥路工作,另一组桥路不工作。
无环可逆调速系统主电路主要由两组反并联的晶闸管组组成,分别控制电机正向、反向运行。控制电路主要包括速度调节器、电流调节器、逻辑控制单元(零电平检查、转矩极性鉴别、逻辑变换)、触发电路等。
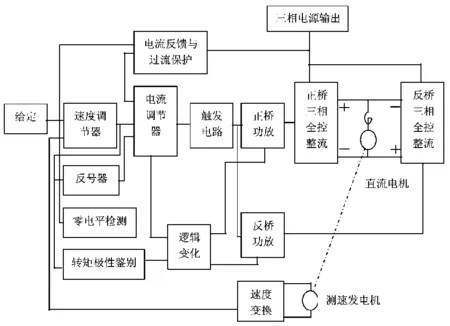
图1 无环流可逆直流调速系统原理图
此系统的主回路由正桥和反桥并联组成,通过逻辑电路来控制正桥和反桥的工作过程,保证了只有一个桥路可以运行,并可以切换,工作过程中没有环流产生,从而来实现电动机的正转与反转,以及速度调节器来调节速度。
2 控制电路设计
为了满足电动轮胎吊的控制需求,对无环流可逆调速系统控制电路设计,采用的时双闭环控制系统结构,并且根据直流电动机的参数,采用双闭环工程设计方法对所研究系统中的电流调节器和转速调节器进行设计。
2.1 电流调节器
图2为双闭环调速系统动态结构图,设计时采用先内环后外环的设计原则,先进行电流环的设计,再设计转速环。一般系统的机电时间常数Tm远大于电磁时间常数T1,即电流变化比速度变化快的多,因此在设计电流环时认为反电动势Ea基本不变,得到电流环动态结构框图如图3所示。
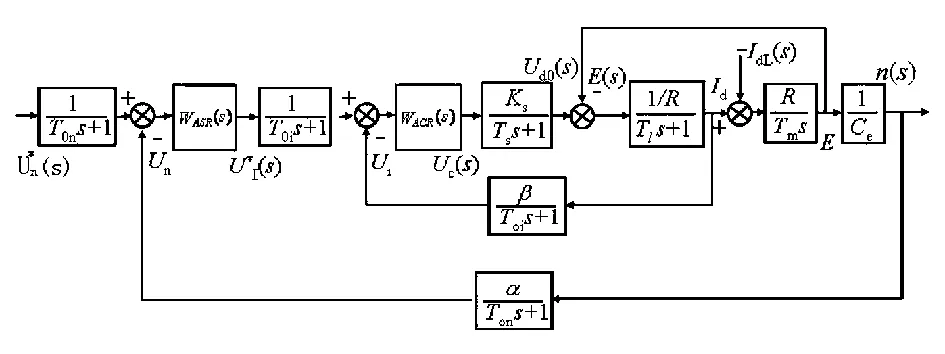
图2 双闭环系统动态结构图
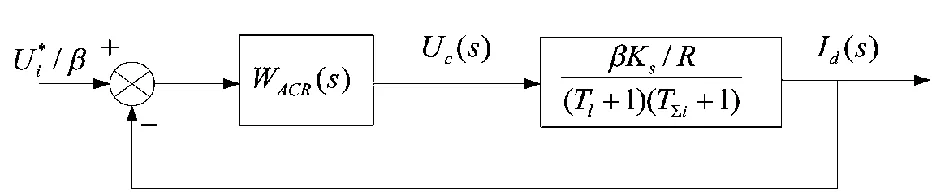
图3 电流环的动态结构框图
按照典型I型系统设计电流环,在运行过程中,电流不超过允许值,系统跟随性能好,输出电流无静差。而电流环动态结构框图中控制对象为双惯性型,此时采用PI型电流调节器将电流环校正为典型I型系统,电流调节器ACR传递函数为式(1):
(1)
此时令τi=Tl,则电流环开环传递函数可换为式(2):
(2)
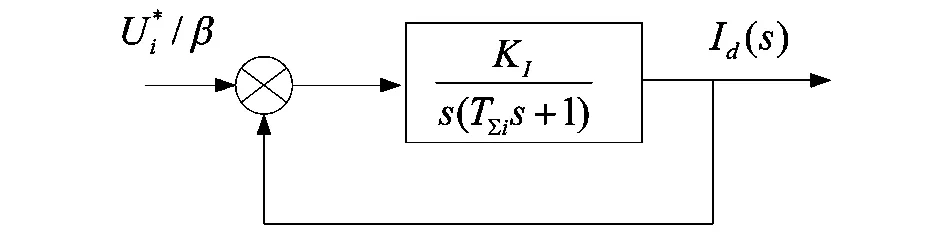
图4 典型I型电流环动态结构图
2.2 转速调节器的设计
将校正后的电流环代替图2中的电流环,则转速环的动态结构框图如图5所示,其中T∑n=1/KI+Ton。电流环等效时间常数1/KI=2K∑i,转速滤波时间常数Ton=0.01,转速环时间常数T∑n=1/KI+Ton。

图5 转速环的动态结构图
选择典型∏型系统作为转速环结构,将图5可改成图6所示,其中转速调节器ASR传递函数见式(3)~(5):
(3)
τn=hT∑n
(4)
(5)
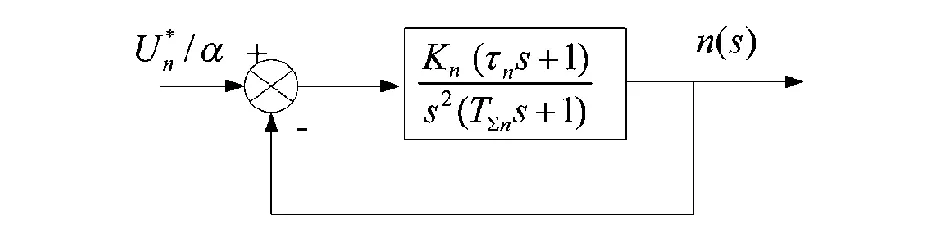
图6 典型Ⅱ型转速环动态结构图
3 仿真及结果分析
为了验证系统的可行性,在此建立了仿真控制电路模型如图7所示。
仿真系统控制电路采用转速、电流双闭环调速控制设计,此处设置两个电流环分别对应两组晶闸管桥路电流控制环,逻辑控制单元DLC用来切换两组晶闸管开通和封闭,保证同一时刻只有一组晶闸管桥路导通。
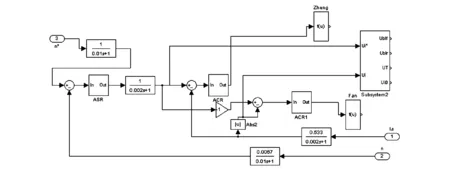
图7 逻辑无环流系统控制电路模型
仿真过程,开始给定转速信号值为10(相当于额定转速1500 r/min),1s后,将给定转速信号反相(相当于给定额定转速值为-1500 r/min),2s后,给定转速信号符号再次反转,如此循环至仿真结束。图8为系统仿真过程中的转速和电枢电流曲线,图9为仿真过程中转速-转矩曲线图。
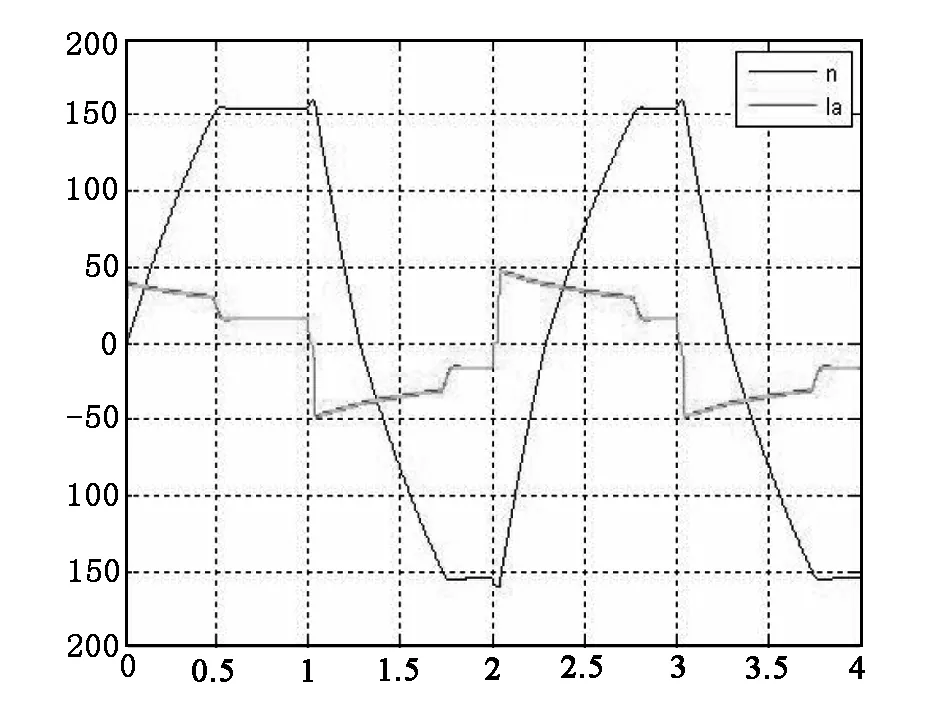
图8 转速和电枢电流仿真曲线图
如图8,当t=0s,电机在给定正转速信号下开始启动,当t=0.5s电机达到稳定运行,电机在额定转速nN=1500r/min下运行。当t=1s,此时系统转速值反相,电机在反向制动转矩的作用下减速,当t=1.3s,此时电机转速为0,反组桥开始工作,重新经历电机启动、运行的转速变化过程。
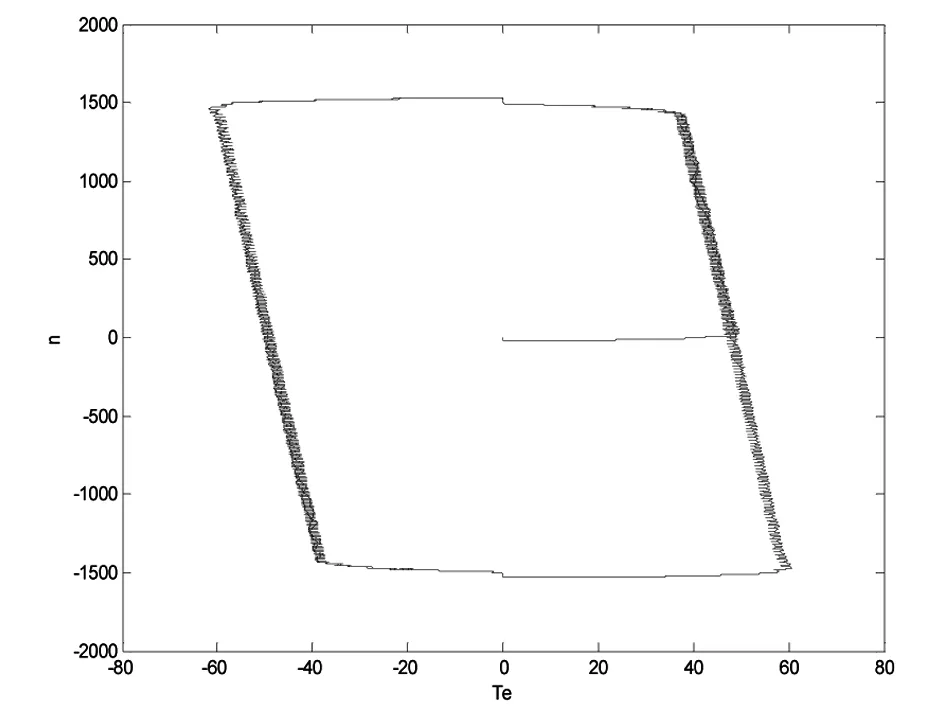
图9 仿真过程中转速-转矩曲线
(横坐标代表转矩信号;纵坐标代表转速信号)
仿真结果表明,所研究的无环流可逆系统在给定转速极性发生变化时,电枢电流方向也跟随改变,实现输出转矩可逆,从而使直流电机在四个象限工作成为可能,验证了主电路的可行性,因此采用无环流可逆调速系统能满足电动轮胎吊对直流电机调速性能的要求。