具有工作状态转换的EIIKF船舶柴油机故障预测
2019-06-11韩敏李锦冰许美玲韩冰
韩敏 李锦冰 许美玲 韩冰
柴油机是目前应用最为广泛的船舶动力装置,其能否健康运行直接影响了船舶运输的安全和效率[1].为实现船舶的视情维护,保障船舶长期稳定运行,船舶柴油机的故障预测技术就显得尤为重要.故障预测技术的应用可以阻止故障的进一步发展[2],减少甚至避免柴油机故障,在最大程度上减小机损带来的损失,节省定期检查的时间,提升运输的效率[3].
但由于船舶柴油机的工作原理和工作环境均十分复杂,在实际的故障预测过程中获得准确的船舶柴油机故障信息非常困难[4].为了更好地将故障预测技术用于船舶柴油机领域,学者们提出了多种方法并获得了较好的结果[5−7].Morgan等[8]提出一种基于润滑样品的光谱分析检测和诊断故障的方法,用于实现较为准确的柴油机故障早期诊断.Porteiro等[9]使用神经网络估计发动机的负荷和健康状态,并确定故障原因,通过使用不同的数据来获得最佳的个体和整体预测准确度.Diez-Olivan等[10]提出了一种基于非参数密度估计的异常检测和nu-SVM正态性建模的数据驱动学习框架,用于解决真实故障信息有限时的船舶柴油机故障预测问题.这些方法的提出有效地提升了故障预测的精度,扩展了故障预测在船舶柴油机方面的应用.
但在实际的船舶柴油机故障预测过程中还容易遇到两个问题,一是当柴油机系统出现工作状态转换时会引起非常明显的状态参数变化,严重影响故障分析的精度.现有的解决方法主要是容错和数据冗余等,但都不利于船舶柴油机故障预测的实际应用.另一个问题是柴油机系统工作原理和工作环境均十分复杂,其状态参数容易受各种干扰等不确定性因素的影响,用于提高故障预测精度的高精度船舶柴油机模型建立十分困难[11],无法更好地展现参数的变化,影响船舶柴油机的故障分析精度.而现有的建模方法一般包括数据建模方法和机理建模方法,但两种方法建立模型在要求精度较高时均非常困难.
基于卡尔曼滤波器的状态估计的故障预测方法是利用状态参数的估计值与观测值进行比较获得的残差来判断系统的健康状态[12],在出现故障趋势的早期将故障判断出来,实现故障预测.随着人们对故障预测精度要求的不断提高,多种改进方法被提出并应用于故障预测领域[13],包括扩展卡尔曼滤波器[14]、无迹卡尔曼滤波器[15]等.这些方法的提出有效提高了故障预测的效率,但仍无法在适应船舶柴油机复杂的工作环境.2007年Gillijns等[16]扩展了未知输入卡尔曼滤波器(Unknown input Kalman filter,UIKF),可以利用未知输入项实现不同工作状态转换的参数预测,同时降低系统高精度建模的复杂性[17].但该方法的预测结果不稳定,同时也会延迟故障的发现.Keller等[18]在2013年提出了一种间歇性未知输入卡尔曼滤波器(Intermittent unknown input Kalman filter,IIKF),可以有效避免未知输入对故障预测效率的影响,但无法达到降低建模复杂度和提升预测精度的目的.
为解决现有船舶柴油机故障预测和卡尔曼滤波器存在的问题,本文提出了一种增强型间歇性未知输入卡尔曼滤波器(Enhanced intermittent unknown input Kalman filter,EIIKF).这种方法结合了UIKF和IIKF的优势,有效地降低了建模的复杂度,同时可以应对船舶柴油机工作环境复杂且工况多变的特点.随后提出并采用改进的序贯概率比检验方法对残差进行处理,判断柴油机的关键状态参数是否存在变化趋势,进而评估系统的健康状态.仿真结果表明,本文所提方法可以更早地发现故障,减小故障误判,提高船舶柴油机故障预测精度.
1 EIIKF参数预测原理
为实现复杂工作环境下的船舶柴油机状态参数的预测,本文提出并使用了一种EIIKF算法.它可以应对预测过程中的不确定性,并最终实现更好的船舶柴油机系统故障预测.
1.1 EIIKF模型
首先,建立EIIKF状态模型如式(1)所示:
其中Ak,Bk,Ck,Dk均为模型中的系数矩阵,用于描述柴油机关键状态参数变化趋势,xk为状态矩阵,yk为输出矩阵,νk和ωk分别为过程噪声和测量噪声,下标k是指预测序数.未知输入补偿项主要由未知输入系数矩阵Fk和未知输入项组成,用于补偿柴油机不同工作状态转换过程和不确定性因素引起的误差,其中本文所提方法中的和上文提到的UIKF和IIKF的未知输入项相比,增加了一个更加灵活的间歇性系数矩阵,用于调整未知输入项对状态估计过程的影响,如式(2)所示:

其中,dk−1|k是未知输入项dk的估计值,用于减小预测误差,同时应对具有不同工作状态转换过程的参数预测.其中的θ为柴油机是否存在工作状态转换的指示,当值为1时表示存在工作状态转换,值为0时表示不存在.其中ρθk参数矩阵中元素选择策略如式(3)所示:

其中,i为预测的状态所在矩阵位置,c1为大于或等于1的常数,c2为一个小于1大于0的特定常数.
由于船舶柴油机工作环境复杂且工况多变,建立的系统状态参数模型无法有效展现这一特点,严重影响预测精度.本文所提EIIKF可以使用未知输入项对预测过程中不确定性进行补偿,降低建模复杂度,同时实现工作状态转换情况下的参数预测.
1.2 参数更新和状态估计
本文中采用增广矩阵的方法推导未知输入估计项dk−1|k,将Xk|k设定为状态xk|k和未知输入估计项dk−1|k的增广矩阵,即. 同样使用增广矩阵方法估计协方差矩阵,令则整体的协方差矩阵写为,经更新计算,其中为先验状态估计和后验状态估计的协方差矩阵,是未知输入的估计与实际应输入值的协方差矩阵.观测值和估计值差对未知输入的影响系数矩阵为,对状态后验估计值的影响系数矩阵为,则,运算的同时对参数进行更新[18],如式(4)所示.
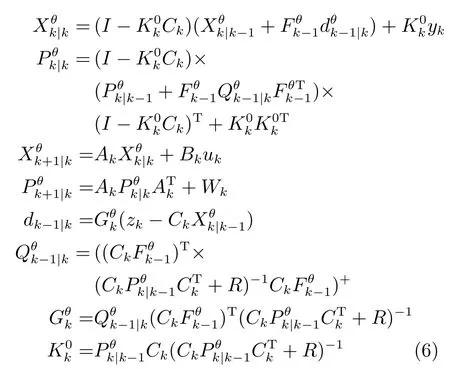
利用式(5)对式(4)解耦,

获得式(6)所示的EIIKF递推公式.
1.3 状态参数预测算法
为应对船舶柴油机存在的工作环境复杂且工况多变的特点,EIIKF在进行参数预测时利用未知输入项对系统状态估计过程中的不确定性进行补偿,利用不同的未知输入项的间歇性系数矩阵ρθk实现工作状态转换情况下的参数预测.使用EIIKF进行具有工作状态转换的参数预测的具体过程步骤如下:
步骤1.建立需要预测的目标系统状态参数模型,选定未知输入间歇性系数矩阵ρθk,默认初始无工作状态转换;
步骤2.进行数据滤波处理,判断是否存在工作状态转换,当存在转换时改变,并变换预测模型为工作状态转换模型,不存在工作状态转换时不进行调整,根据现有数据和式(6)进行参数更新;
步骤3.重复进行步骤2,若步骤2发现正在进行工作状态转换,则需要判断是否完成工作状态转换,若完成时改变,切换模型,并在正常工作模型基础上调整µk值.
2 改进的序贯概率比检验方法的残差处理
为实现完整的船舶柴油机故障预测,本文提出了一种改进的序贯概率比检验方法,并将其用于残差处理,将原有的序贯概率比检验方法转换为实时在线判定的方法,同时也提高了故障判断精度.
序贯概率比检验的残差处理是一种基于统计规律的方法,其原理如式(7)所示,

其中,zk是第k个采样点处观测值,yk为第k个采样点的预测值.令H1为假设出现故障,H0为假设无故障,则λ(k)为假设有故障和无故障时出现现有残差分布情况的概率比值的对数[19].分析可知,系统正常时,使用卡尔曼滤波器估计值与观测值产生的残差符合均值为0的高斯分布,当系统出现故障时,估计值与观测值出现较大偏差,符合均值不为0的高斯分布.因此λ(k)可写作为式(8)所示.

序贯概率比检验结果是一种残差累加,可以更加有效地发现缓变故障.由于系统的故障模式不一,故障阈值的选择需要使用特定的方法.通过统计获得整个系统的误判率β,即未出现故障却判断为出现故障的比率;以及漏判率α,即出现故障却判断为未出现故障的比率.使用式(9)获得两个判断的阈值.

当λ(k)<η时判定系统没有故障,当λ(k)>δ时判定系统产生了故障,在η<λ(k)<δ时无法判断系统健康状态,需要继续进行判断.
在实际应用中我们可以认为当λ(k)<δ时即不可判定系统存在故障,在连续多个采样点保持λ(k)<0之后可以判定此处没有故障.本文提出的改进序贯分析方法直接忽略此处的η,选定特定常数n,在连续n个采样点均满足λ(k)<0时可以将λ(k)归零,重新开始判断.
上述的方法仍可能出现较大的误判率,因此本文提出的改进序贯概率比检验算法选定了一个滑动窗口,其窗口长度为N,计算滑动窗口内λ(k)>δ的次数,这个次数与窗口长度N之比可认为是此时发生故障的概率[20],本文中一般选用N=50就可以保证要求,可以过滤大部分误判现象.根据对故障误判要求不同,可以人为设定灵活的概率ϕ作为故障发生与否的阈值.
综上所述,使用改进的序贯概率比检验方法对残差进行处理的步骤归纳如下:
步骤1.利用历史数据和式(8)获得λ(k),根据统计计算获得故障误判率β和漏判率α;
步骤 2.根据式(9)获得故障判断阈值δ,选定固定常数N和n的值,选定判定阈值ϕ;
步骤 3.利用式(8)在线获得λ(k),当出现n次符合λ(k)<0时将其归零,连续判定最近N个采样点内符合λ(k)>δ的次数,计算此时出现故障的概率;
步骤4.当概率超过所选阈值概率ϕ时判定此时出现故障,未超过则持续进行步骤3和4.
3 仿真实验
为验证本文所提方法在柴油机故障预测过程中的有效性,以MAN公司6S35ME-B9型柴油机为对象建立AVL BOOST柴油机模型,根据AVL BOOST柴油机模型计算获得特定工作状态参数数据,工作状态转换数据直接使用柴油机台架实验数据.此外,采用在AVL BOOST建立的柴油机模型中逐步增加故障因素的方法仿真获得故障发生过程数据,三者组合获得仿真数据,其中采样间隔是10s.在柴油机处于负荷工况时选取75%负荷和90%负荷两个平稳工作状态各800个样本,两个工作状态转换数据95个样本.在柴油机处于推进工况时选取90%推进和75%推进两个平稳工作状态数据各800个样本,两个工作状态转换数据42个样本.排气口堵塞故障发生过程数据1035个样本,空冷器冷却不足故障发生过程数据1025个样本,涡轮机机械效率下降故障发生过程数据1151个样本.
温度压力等热力学参数信号是非常重要的船舶柴油机健康状态的指示器[21],本文主要通过这些热力学状态参数对柴油机故障进行分析.为实现对柴油机中子系统健康状态的预测,本文选择的关键状态参数主要包括压力机流量、压力机前后压差、空冷器前后温差、空冷器前后压差、排气温度和排气压力等.压力机流量和压力机前后压差在很大程度上可以表征涡轮增压器的健康状态,空冷器前后温差和压差可以在很大程度上表征空冷器的健康状态,而排气温度和排气压力出现变化则可以表征气缸系统的潜在故障.另外本文中假设所有故障都是柴油机系统故障,在实际应用时可以通过多源信息融合的方法区分系统故障和传感器故障.
3.1 在线预测
为验证本文提出EIIKF的参数预测特性,分别采用UIKF和IIKF两种算法对多种具有不同工作状态的柴油机状态参数进行预测并与EIIKF预测结果进行对比.由于系统影响因素较多,使用专业知识进行柴油机关键参数的建模过程非常复杂.本文采用自回归方法利用历史数据对不同状态参数变化过程建模[14],并将这些模型用于参数预测.
使用三种算法对柴油机排气温度等参数进行预测的均方根误差(Root mean-squared error,RMSE)结果对比如表1所示.UIKF是在预测过程中加入未知输入,可以减小参数预测过程中的不确定性噪声引起的误差.但从图1也可以发现,该方法参数预测值较为敏感,容易引发故障误报.IIKF可以较好地完成具有工作状态转换的参数预测,但不能体现系统正常工作状态特征.EIIKF结合了两种方法的优势,可以有效进行具有工作状态转换的参数预测,同时表1可以明显发现本文所提方法在参数预测方面得到了较好的结果,同时能够避免预测模型输出敏感引起误报的可能性.
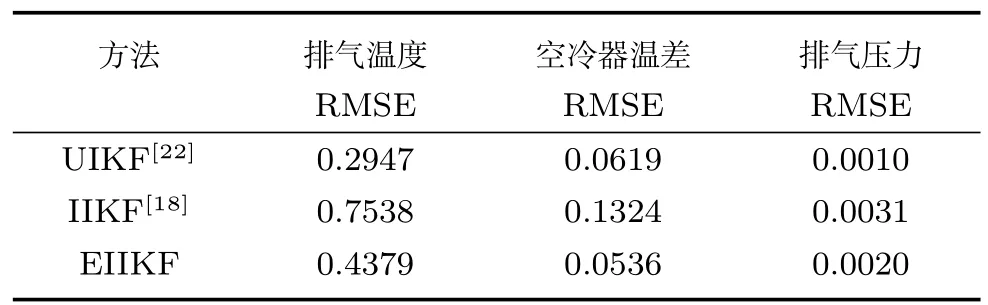
表1 三种算法参数预测误差对比表Table 1 The residual comparison of three algorithms for parameter prognosis
下面以排气温度的90%推进工作状态向75%推进工作状态的转换为例对EIIKF的工作状态转换的参数预测能力进行验证并与UIKF和IIKF预测结果进行对比.如图2所示,在第40个采样点处开始进行工作状态转换,在第97个采样点完成工作状态的转换.
从三种算法对工作状态转换过程的参数预测结果中,可以发现在工作状态转换之后UIKF的预测精度变差,可知UIKF预测方法的鲁棒性不强.EIIKF和IIKF均可以完成工作状态转换的参数预测,但IIKF在稳定工作状态的预测过程中精度较低,影响故障预测效果.
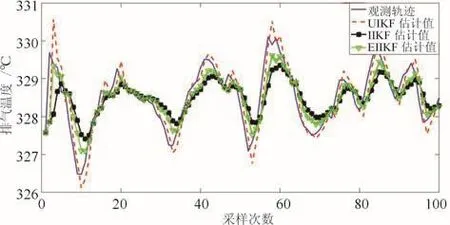
图1 三种算法对排气温度的预测结果比较Fig.1 The comparison of parameter prediction results for exhaust temperature of three algorithms
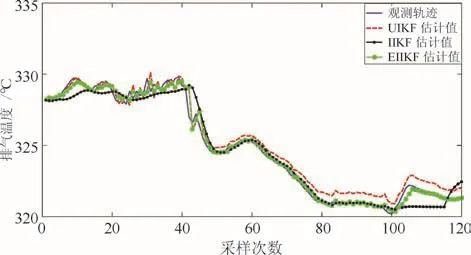
图2 三种算法对具有工作状态转换的排气温度预测结果Fig.2 The prediction results of exhaust gas temperature with working state transition by three algorithms
图3是使用EIIKF加入未知输入项和未加入未知输入项时应对上述工作状态转换过程进行预测结果对比.加入未知输入时EIIKF的预测误差RMSE=0.3789,对故障预测影响不大,而未加入未知输入时RMSE=1.0732,可以有效区分故障因素和工作状态转换因素引起的参数突变.
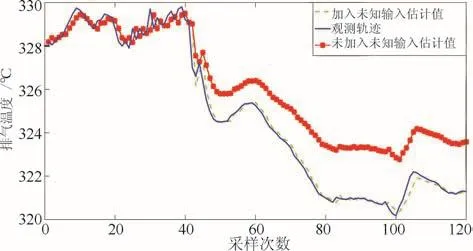
图3 EIIKF对加入和未加入未知输入时的排气温度预测结果Fig.3 The prediction results of exhaust gas temperature with and without unknown input by EIIKF
3.2 在线残差处理
本文提出并采用改进的序贯概率比检验方法用于预测残差处理,并与现有残差处理方法进行仿真对比.其中用作仿真的排气温度数据组成如下:在75%负荷工作状态平稳运行800个采样间隔后向90%负荷工作状态转换,转换完成后平稳运行至1695个采样点开始加入故障因素,在2650个采样点处出现数据突变,可以认为此处发生故障的可能性最大.
图4是使用EIIKF进行的排气温度进行参数预测的结果,同时使用三倍标准差方法[23]对残差进行判断,可以发现在第748、897和2065个采样点以后分别发现了故障,与实际情况不符,因此三倍标准差方法存在误判和较严重的漏判现象.
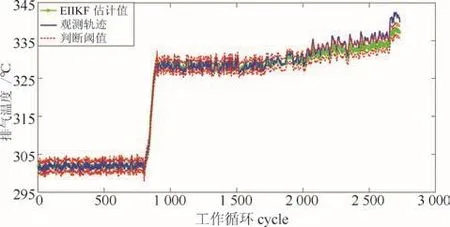
图4 EIIKF排气温度的预测结果及三倍标准差残差判断Fig.4 The prediction result of exhaust gas temperature use EIIKF and three-sigma range residual judgment
图5是使用传统序贯概率比检验方法和本文所提改进序贯概率比检验对上述EIIKF预测产生残差处理的情况对比,改进的序贯概率比检验方法明显可以较早地发现故障.使用传统序贯概率比检验方法计算排气温度残差故障阈值,β=0.2449,α=0.1069,则判断阈值δ=7.0636.在第62、1534至1558个采样点和1991个采样点以后处均超出阈值,可以看出传统序贯概率比检验方法也存在较为严重的误判现象.
使用本文提出的改进序贯概率比检验结果进行排气温度残差分析,在连续30个采样点的序贯结果小于0时认为系统无故障,此时可以将归零.此处的β=0.2427,α=0.0643,则故障阈值δ=11.7783.为减小故障误判,此处滑动窗口长度选用N=50,选用阈值概率ϕ为100%,在第1947个采样点处发现故障.因此本文所提改进序贯概率比检验方法相较传统序贯概率比检验方法可以保证特定误判率要求的故障预测,相较三倍标准差方法明显较早发现故障.
表2是几种残差处理方法对三种不同故障发生过程判断结果,选用误判率、漏判率和精确度三种评价指标对残差处理方法进行比较.在表2中可以发现本文所提改进序贯概率比检验方法保证了较低的误判率,同时也具有较高的精确度,只有序贯概率比检验在故障2的判断时精确度高于改进序贯概率比检验方法,但该方法的误判率明显过大,认为此处出现了故障预测失败.因此可知,改进的序贯概率比检验方法可以应对在线的故障判断,在减小故障误判的同时较早地发现故障,更好地应用于系统视情维护.
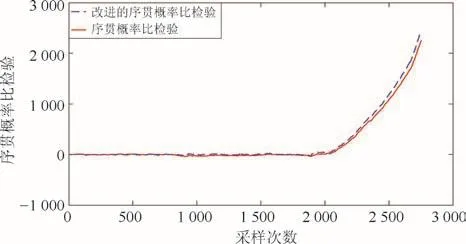
图5 序贯概率比检验和改进序贯概率比检验结果对比Fig.5 The comparison of sequential probability ratio test results and improved sequential probability ratio test results
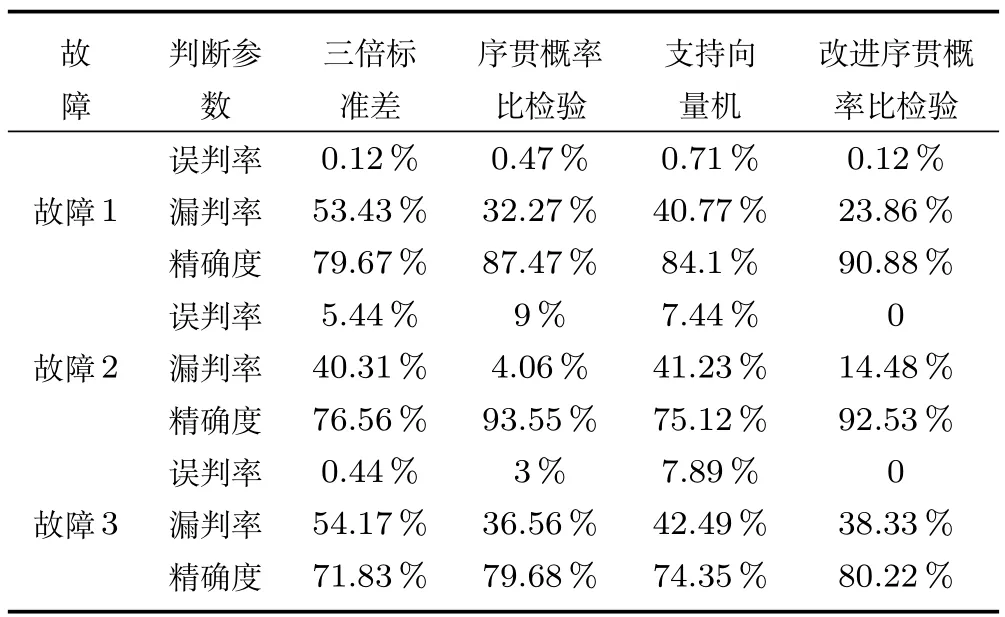
表2 几种方法残差处理对比表Table 2 The comparison of several methods for residual processing
3.3 故障预测验证
为验证本文所提方法的有效性,对柴油机运行工况变化过程中的系统故障进行预测,并使用改进的序贯概率比检验方法对残差进行处理,测试结果如表3所示.
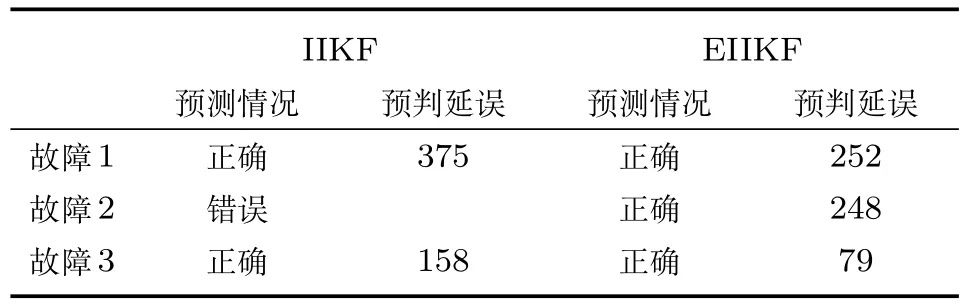
表3 IIKF和EIIKF故障预测对比表Table 3 The comparison of IIKF and EIIKF for fault prognosis
比较表3中两种方法的故障预测特性可以发现,在具有工作状态转换的故障预测过程中,EIIKF对上述故障均实现了较好地预测,且相对IIKF具有明显优势.由于IIKF在参数预测时存在预测精度不理想的现象,会出现部分参数的故障预测失败的问题.
4 结论
本文针对船舶柴油机工作环境复杂和工况多变的特点,提出了一种EIIKF算法用于弥补参数预测过程中的不确定性,降低建模复杂度,实现具有工作状态转换情况下的船舶柴油机状态估计.然后提出并使用改进的序贯概率比检验处理预测残差,可以按照特定误判率要求评估柴油机的健康状态,最后通过对柴油机具有工作状态转换的状态参数进行预测,说明该方法的有效性.仿真结果证明,本文所提方法能有效解决船舶柴油机参数建模复杂和具有工作状态转换情况下的故障预测问题.
