极化SAR参数优化与光学波谱相结合的面向对象土地覆盖分类
2019-06-10赵诣,蒋弥
赵 诣,蒋 弥
河海大学地球科学与工程学院,江苏 南京 211100
土地覆盖分类作为遥感领域最重要的应用分支之一[1],分类结果从宏观角度提供了地物的基本信息,在环境监测、农业管理、城市规划等应用中不可或缺[2-4]。遥感技术为大范围掌握土地覆盖情况提供了契机[5],传统的光学遥感受天气等环境因素制约无法在多云雨地区作业[6]。合成孔径雷达(synthetic aperture radar,SAR)能够全天时、全天候工作,利用SAR数据进行土地覆盖分类逐渐成为研究热点[7]。自20纪90年代开始,已有学者就SAR分类能力展开研究[8],随后大量研究表明,不同的雷达参数能够提高分类精度[9-11]。此外,当获取多时相、多极化数据时,不同的地物属性得以更加完整的描述,地物识别能力得到加强[12-14]。还有许多学者使用多源数据融合光学和SAR遥感影像更加准确地分析地物属性[15-17]。
以上研究已经较好地利用雷达数据的优点进行地物分类,但仍存在不足之处。第一,上述成果主要通过增加特征数量达到提高分类精度的目的,鲜有文献考虑提取特征对地物的识别能力及其估计的准确性。文献[18]表明较分类器而言,输入特征对分类精度影响更加显著;文献[19]使用不同滤波算法抑制噪声,研究表明滤波后影像分类精度提高约5%;文献[20]通过检验假设更加准确地估计相干性,分类结果保持良好的几何特征,总体精度提高10%。以上研究均表明优化特征参数能获取精度更高的分类结果。第二,常用的基于像素分类方法难以保持地物几何特征,椒盐现象严重,部分研究考虑分割雷达影像[21-22],然而SAR影像中大量噪声导致分割结果不可靠。最后,随着新一代Sentinel系列卫星发射,已有学者验证其分类能力[23-25],但Sentinel-1双极化特性相关研究仍不成熟。
针对上述问题,本文对输入特征与分类方法分别进行优化以期提高分类精度。首先,改进极化参数提取方法,利用光学影像良好的波谱特性指导SAR影像选取同质点,取代原有正方形窗口选点,估计极化参数;其次,使用面向对象的分类器,将光学影像分割结果应用于极化SAR分类;最后,评估Sentinel-1/2融合地表分类精度,并与现行基于像元的分类方法进行对比,论证本文方法的可行性。
1 优化的输入参数及分类方法
(1)
(2)
(3)
1.2 基于光学影像的同质像素选择
为了抑制噪声,目标分解通常使用正方形滑动窗口平均邻域像素。假设中心像素和邻域像素属于同一地物,然而实际应用中滑动窗口内包含了大量异质点,直接平均影响地物统计特性,导致极化参数估计存在误差且易出现分辨率损失,地物边缘模糊等现象,在纹理丰富区域如城市、农田区域这一问题更加严重。就如何选取同质点,国内外学者从像素相似性和统计意义等不同角度提出大量算法[32-33]。这些方法计算了像素分布特性,通过假设检验从SAR影像中直接选取同质点。相比SAR影像,地物在光学影像中几何特征和纹理信息更加显著,因此本文从光学影像选取同质点指导极化参数估计。
不同地物在灰度直方图中具有不同的峰值,文献[34]首先提出一种基于灰度直方图的图像分割方法,通过迭代计算阈值区分地物,随后不同学者提出了大量的改进方法[35-36]。然而阈值分割仅通过灰度直方图将像素分为不同类型,不能直接用于中心像素的同质点选择。由于同质像素各类属性相似,因此本文使用欧氏距离作为判别标准。首先计算中心像素与邻域像素的距离,将同质点选择问题转换为阈值分割问题。为了避免“同谱异物”和“同物异谱”现象的干扰[37],试验选择小尺寸滑动窗口,在小窗口内地物种类较少,通过阈值能够准确区分。
(1) 首先在光学和SAR影像相同位置选择同样大小滑动窗口,计算中心像素与窗口内各像素间的欧氏距离
(4)
式中,dp,c表示像素p与中心像素c的距离;xpi、xci分别表示像素p和中心像素c的第i个波段观测值;N为影像总波段数量。
(2) 假设初始阈值T=T0为窗口内所有像素距离均值。

(4) 重复迭代步骤(3)直至T不再变化,最终所有距离小于T的像素被选为同质点。
图1为同质点选择(a)和直方图阈值分割结果(b),其中符号*和•分别代表中心像素与选中的同质点,多次模拟试验表明迭代阈值同质点误选率低于0.1。
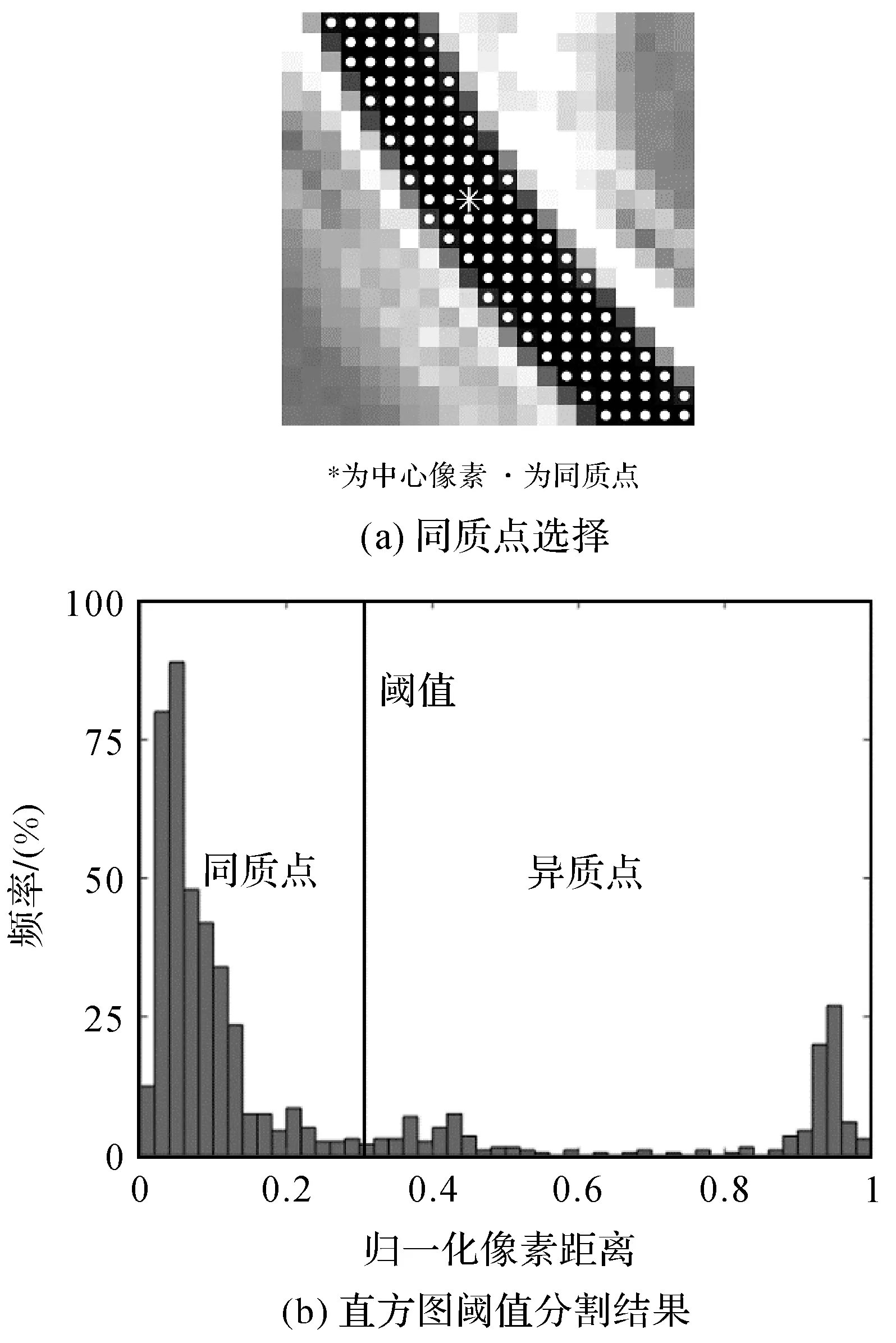
图1 同质点选择与直方图分割结果Fig.1 Results of homogeneous pixels selection and threshold segmentation
1.3 面向对象的分类方法
虽然上述理论分析能够更加准确地提取极化参数,但噪声影响、分辨率损失依然存在,若直接作为输入变量参与分类,特别是基于像素的分类方法,分类精度会因此衰减[38]。使用面向对象的分类方法能够抑制噪声影响,分类结果能够保持良好的几何特征[39]。在众多分割方法中,多尺度分割[40]根据影像灰度、纹理特征及像素间背景关系计算异质性参数f,将性质相同的像素合并为对象参与分类,分割效果优越,如式(5)、式(6)所示
f=ωcol×Δhcol+ωsha×Δhsha
(5)
Δhsha=ωcom×Δhcom+ωsmo×Δhsmo
(6)
式中,Δhcol、Δhsha、Δhcom、Δhsmo分别表示灰度、形状、精致度、光滑度的特征参数值;ωcol、ωsha、ωcom、ωsmo分别表示具体描述对应特征的权重值,且ωcol+ωsha=1,ωcom+ωsmo=1。相比SAR影像,光学影像灰度和纹理特征更加清晰,因此,本文仅将光学影像作为分割输入特征以避免污染纹理,SAR影像采用相同分割,避免相干斑引起的分割错误。
2 试验分析
2.1 研究区及数据源
本文选择Bakersfield作为研究区域,该区域(35°15′N-35°42′N,118°29′W-119°20′W)位于美国加州南部沙漠,是加州主要城市之一。该地区地物类型多样,以城市建筑用地与农业用地为主,纹理复杂,适合用于检验本文方法的分类能力。试验区域地理位置如图2所示,其中红色阴影为研究区域的范围,红色线框为影像覆盖范围。
雷达数据采用Sentinel-1B干涉宽轨模式单视复数双极化影像,极化方式为VH+VV组合,获取于2017年7月13日,影像方位向和距离向分辨率分别为5 m和20 m。为了避免影像获取时间不同对分类结果的影响,光学数据选取成像于2017年7月7日的Sentinel-2A1C级别影像。本文试验仅使用4个10 m分辨率波段(B2(蓝)、B3(绿)、B4(红)、B8(近红外))。
在数据验证方面,本文采用2011年美国地质勘测局(USGS)发布的30 m分辨率全美土地覆盖类型数据集(National Land Cover Database,NLCD)作为真实地物类型的参考[41]。考虑到NLCD数据与试验数据时间间隔长达6年,与真实地物分布情况仍有差异,所以在训练样本和验证样本选择过程中还参考了高分辨率GoogleEarth光学影像,以确保样本获取的质量。
地物类型的定义根据美国2011年NLCD数据[41],共划分为7类:水体、湿地、灌木、草地、农田、高密度人工建筑及中低密度人工建筑。参照光学影像和NLCD数据随机层析抽样,每类地物各选取15个样方作为训练样本(图3(a)),检验样本由每类10个样本构成(图3(b))。
2.2 参数优化比较
本文使用IDAN滤波算法抑制噪声[42-43],图4(b)中仍存在大量噪声,图4(c)、(d)比较了使用正方形窗口和利用光学影像选取同质点两种方法的平滑效果,窗口大小均为11×11。本文提出的方法能够有效减少边界模糊现象,部分地物边缘得到加强。
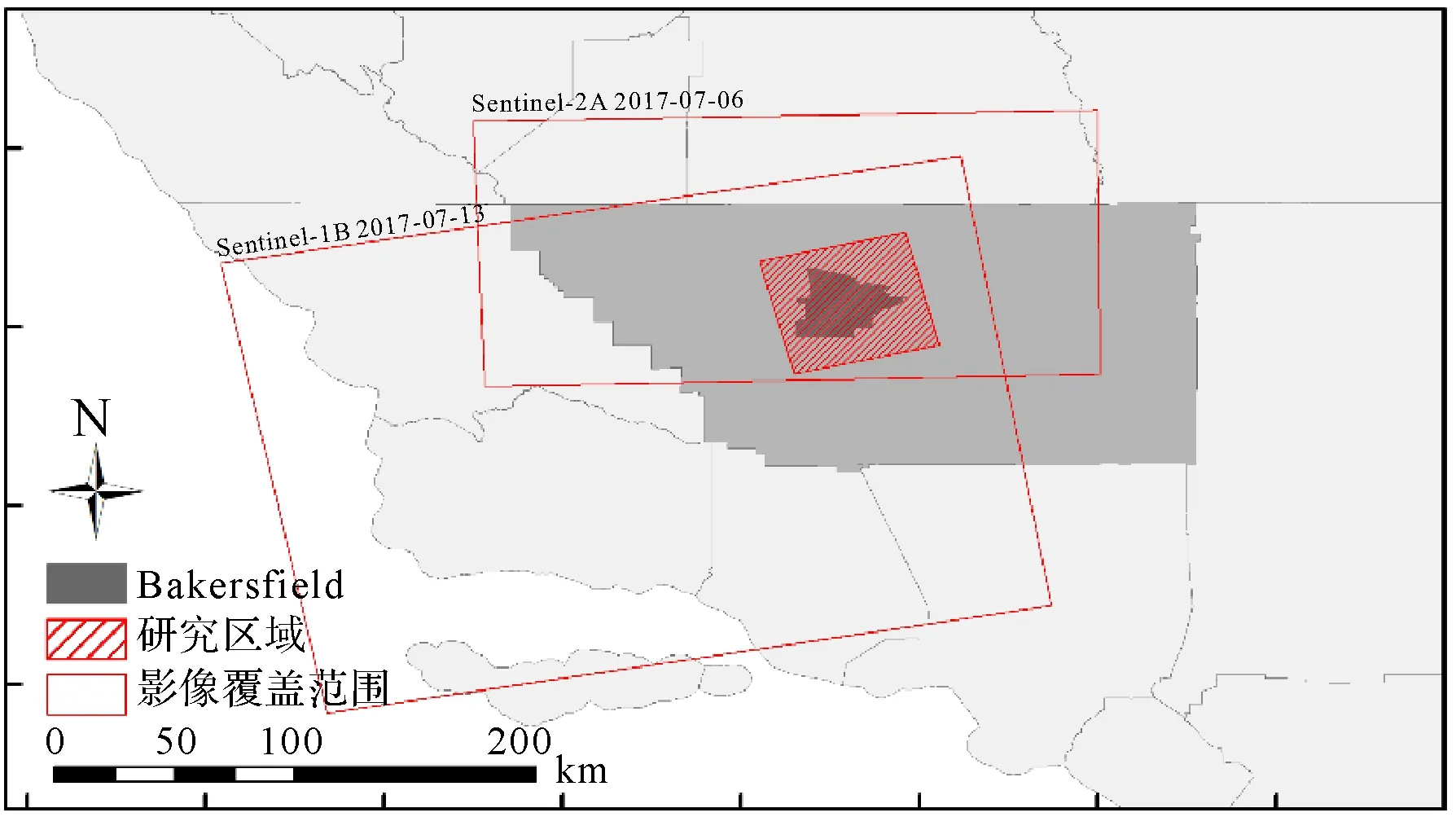
图2 研究区域地理位置Fig.2 Geographic location of study area and data set
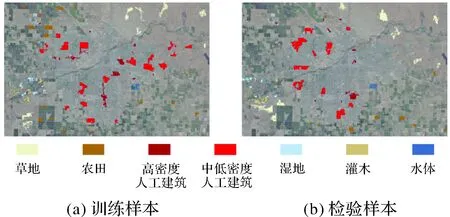
图3 训练样本和检验样本(底图为Sentinel-2A光学影像R、G、B:B4、B3、B2)Fig.3 Training sample and validation data(base map: Sentinel-2A optical image R,G,B:B4,B3,B2)
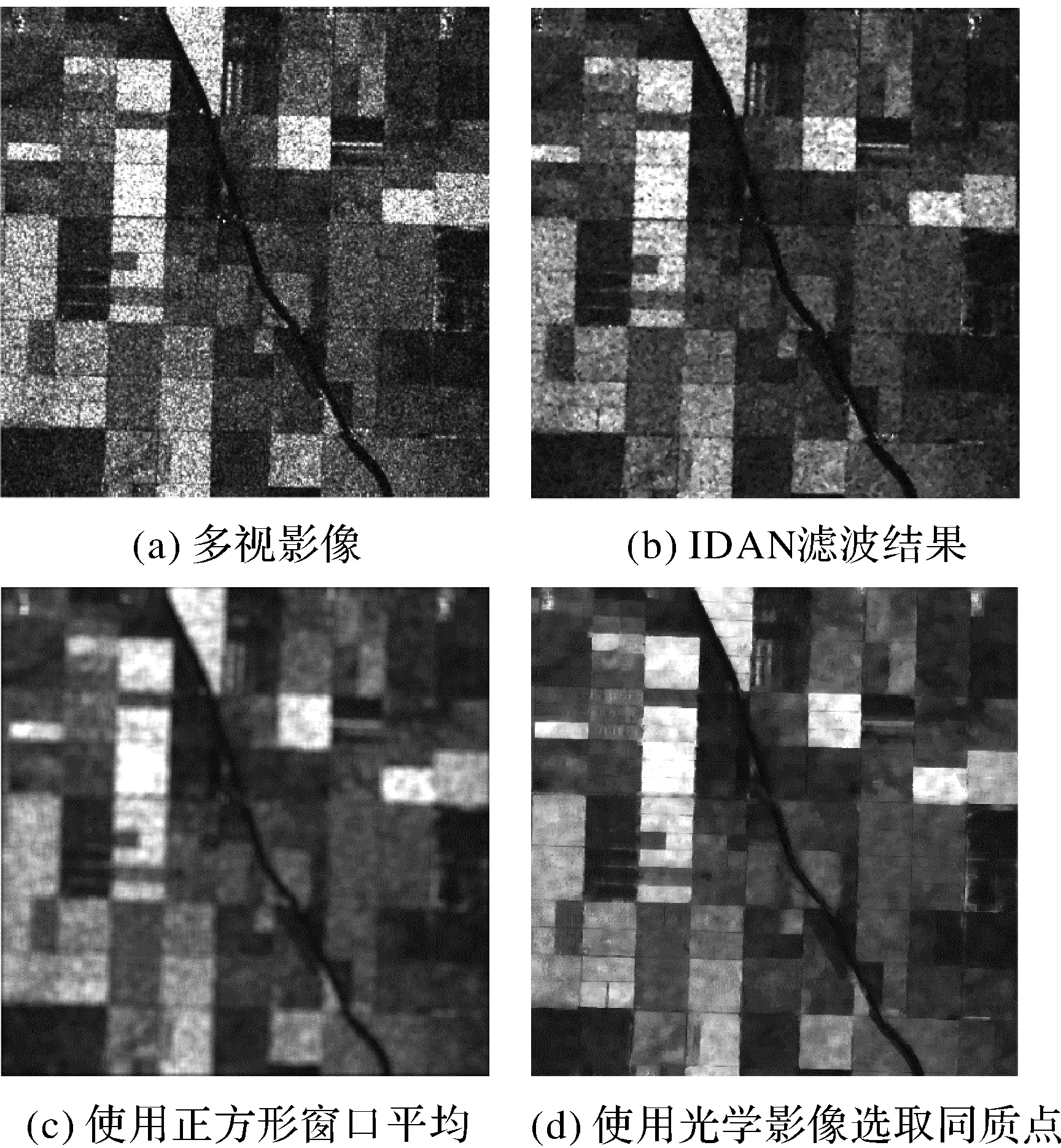
图4 两种方法平滑影像效果对比(VV)Fig.4 Comparison of images averaged using two methods (VV)
进一步分析本文方法对解译地物属性的影响。图5为两种不同方法所得极化参数。传统方法所得结果无法保持地物边缘,白色窗口内线状地物甚至无法识别,本文提出的方法能够有效避免这一现象。在保持地物边界同时,由于减弱了异质点的影响,散射机制逐渐统一,随机性得到抑制,因此极化参数H显著降低。优化输入参数对分类结果的影响,将结合分类精度定量分析。
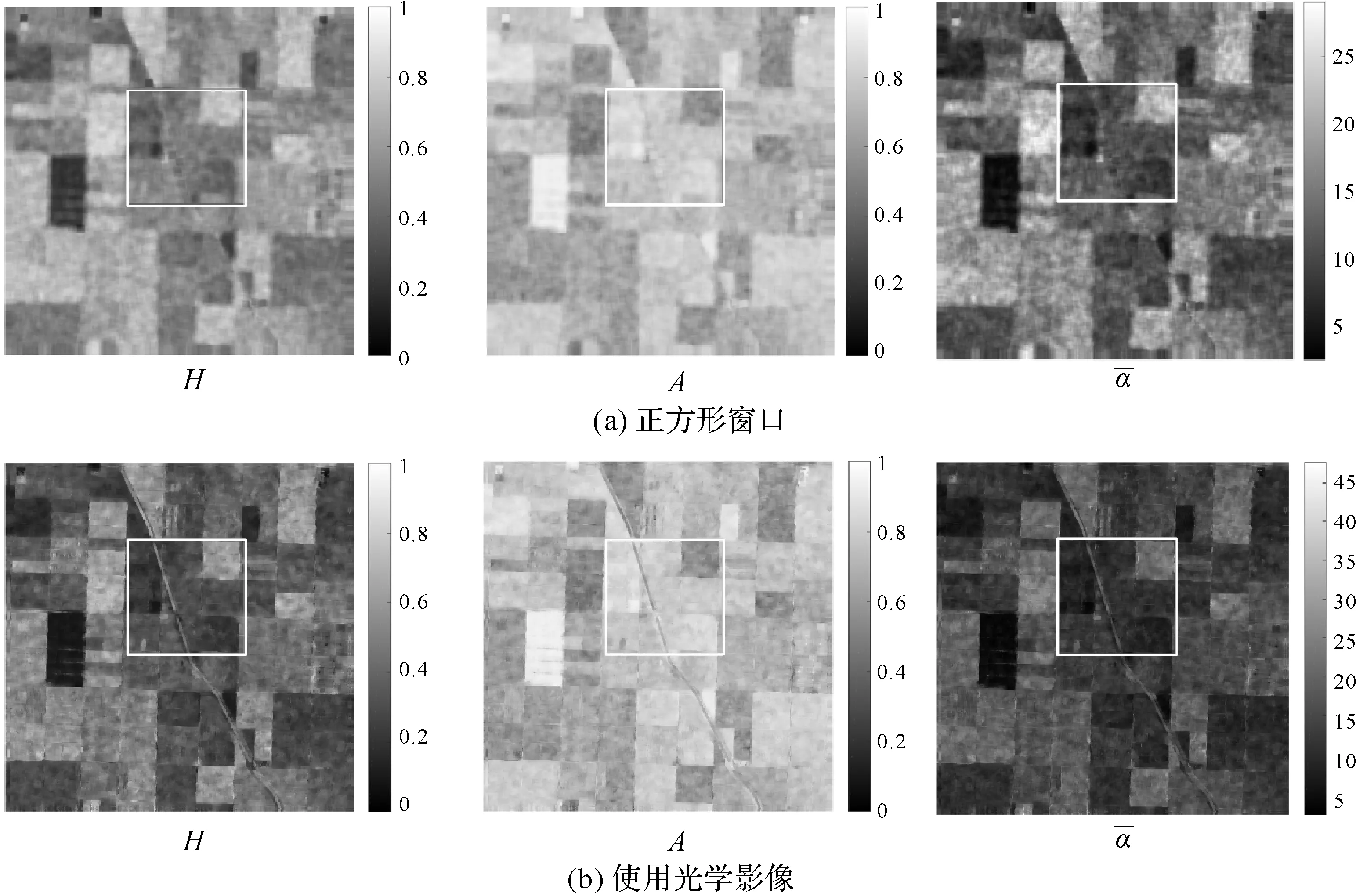
图5 两种方法提取极化参数对比Fig.5 Comparison of parameters extracted using two methods
2.3 分割结果
由于试验区范围较大且地物形状较为规则,经过多次试验比较最终确定分割尺度参数为300,形状因子和紧致度参数分别设为0.6和0.5。原始影像中含有1120万个像素,经过影像分割后仅剩3853个对象,运算量大幅减少。局部分割结果如图6所示,农田、人工建筑等地物均能被准确分割。
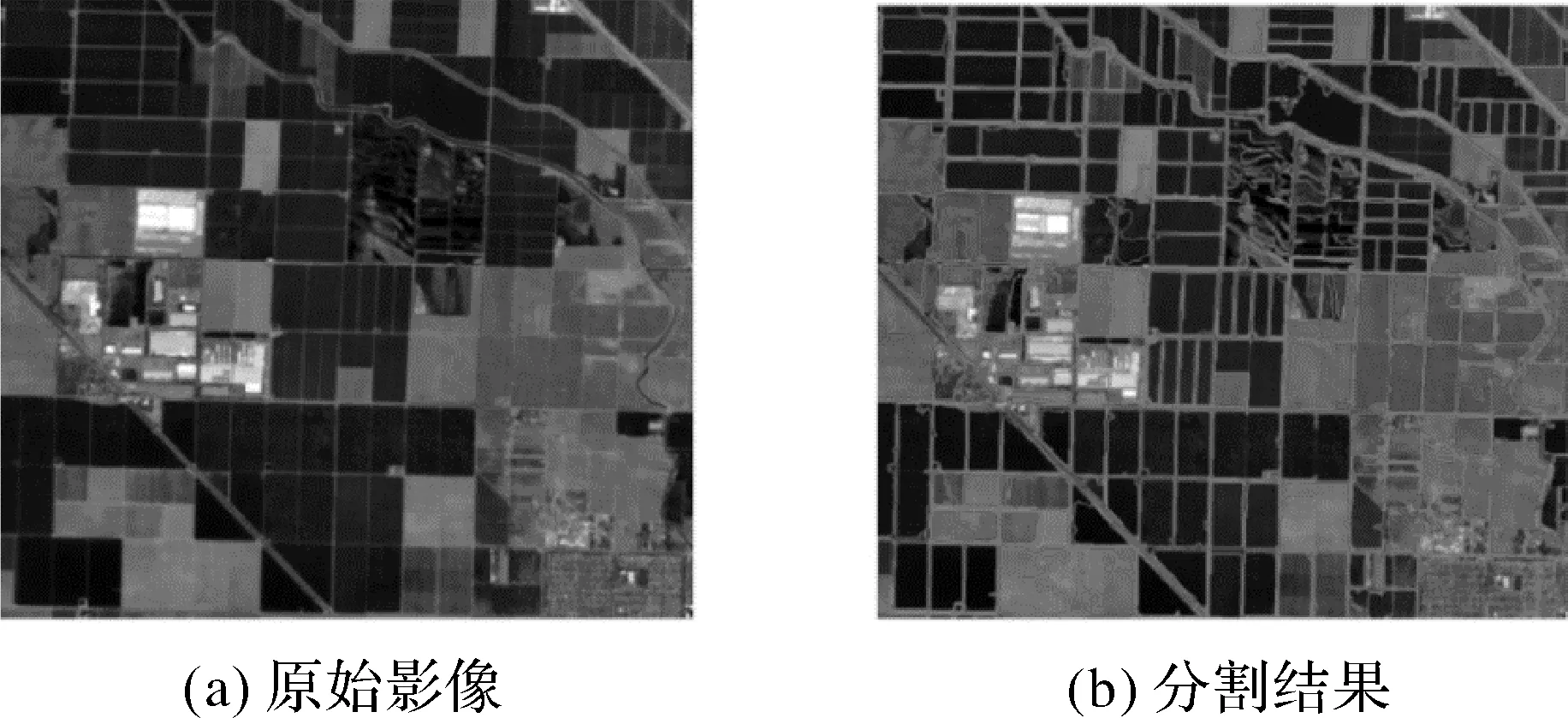
图6 影像分割局部结果Fig.6 The results of segmentation at local scale
2.4 各类地物特征分析
为确保各类要素在试验数据中可分,对各类地物观测值进行特征统计,其光谱特征与极化参数统计如图7(a)—(d)所示。可以看出,在光学影像中农作物、草地、灌木及湿地几类自然植被波谱特征相近,与人工建筑和水体差异显著;相反,几类自然地物由于物理结构差异显著因此通过后向散射系数与极化参数特征能够轻易区分,而部分人工建筑与草地、湿地散射机制相似,以二次散射为主,仅通过SAR参数不易区分。这种光谱特征和散射机制差异说明单个传感器不能将所有特征进行区分,而将两者相结合,能够增加特征对比度,进而提高分类精度。
2.5 分类结果精度评定
为了获取稳定的分类结果,避免“维数灾难”,本文选择支持向量机分类器(support vector machine,SVM)[44-45],使用交叉检验优化RBF核函数,惩罚因子C与核参数g分别为1和0.125,优化精度为91%(图8)。在分类之前采用Z转换将所有特征进行归一化处理,减小不同特征层数值范围差异对分类精度的影响。
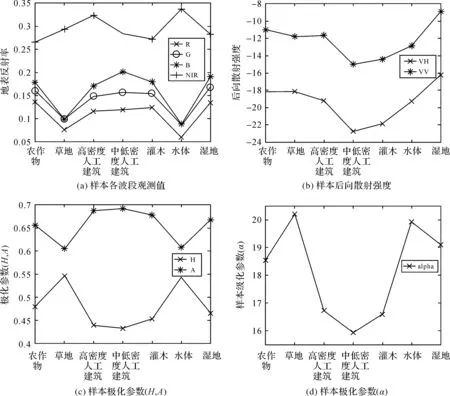
图7 样本观测值特征统计Fig.7 Statistics of all classes samples
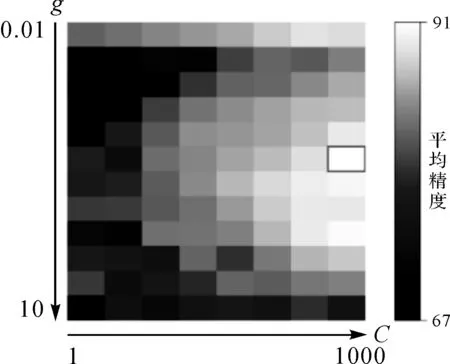
图8 SVM参数优化结果Fig.8 SVM parameter optimization
本文试验结果分辨率为10 m,相比30 m分辨率NLCD数据,地物细节特征更加丰富,能够准确识别尺寸较小及不连续分布的地物。NLCD数据与试验影像获取时间相隔6年,城市范围扩张、植被面积减少等变化对比光学影像能够明显辨别。为强调本文分类方法的优势,选取纹理丰富的城市区域(图9(a))和湿地区域(图9(b))为测试区。
定性分析,在两个子区域,面向对象的分类结果更加接近地物在光学影像中的分布,相比基于像素的分类结果,地物几何特征更加规则。考虑输入参数对分类结果的影响,从图9中可以看出,两种数据源所得结果并无明显差异,仅有部分中低密度人工建筑和湿地分类存在分歧。对比光学影像,改进参数所得结果更加合理。这一现象可以归因于影像分割时,已将同质像素合并作为整体分析,噪声得到抑制,因此未能体现参数质量的重要性。对极化参数改进的优势在基于像素分类时得以展现,高密度人工建筑范围估计更加准确;湿地区域内,草地和人工建筑误分显著降低,不规则形状的灌木和湿地纹理信息得以保持。
定量分析,本文选择制图精度、用户精度及Kappa系数作为评价指标,基于对象和像素的分类结果评定分别如表1、表2所示。
使用改进输入参数的面向对象分类方法获得最高总体精度92.6%。就分类方法而言:使用面向对象分类方法时,两种输入参数所得结果总体精度均提高8%左右。在各类地物中人工建筑和灌木纹理复杂,基于像素分类受异质性影响严重,因此两类地物精度最低。影像分割后,减少了异质点的影响,对地物散射特性分析更加准确,因此分类精度在人工建筑和灌木区域精度提高更加显著,这一趋势与目视解译结果相吻合,也体现了面向对象分类方法的优势。就数据源而言,如前分析,优化输入参数对面向对象分类精度没有明显改变,使用基于像素分类方法时,各地物分类精度均有所提高,在纹理丰富的城市和湿地区域,精度提高达到8%。
表1 基于对象分类方法精度评估
Tab.1 Assessment of classification accuracy obtained with two kinds of parameters using object-based classifier
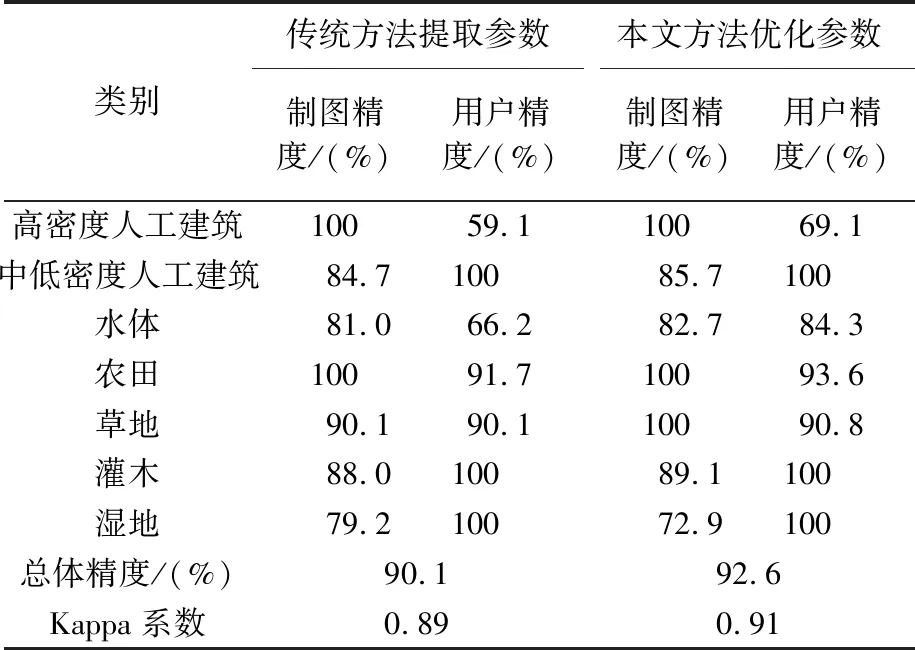
类别传统方法提取参数本文方法优化参数制图精度/(%)用户精度/(%)制图精度/(%)用户精度/(%)高密度人工建筑10059.110069.1中低密度人工建筑84.710085.7100水体81.066.282.784.3农田10091.710093.6草地90.190.110090.8灌木88.010089.1100湿地79.210072.9100总体精度/(%)90.192.6Kappa系数0.890.91
表2 基于像素分类方法精度评估
Tab.2 Assessment of classification accuracy obtained with two kinds of parameters using pixel-based classifier
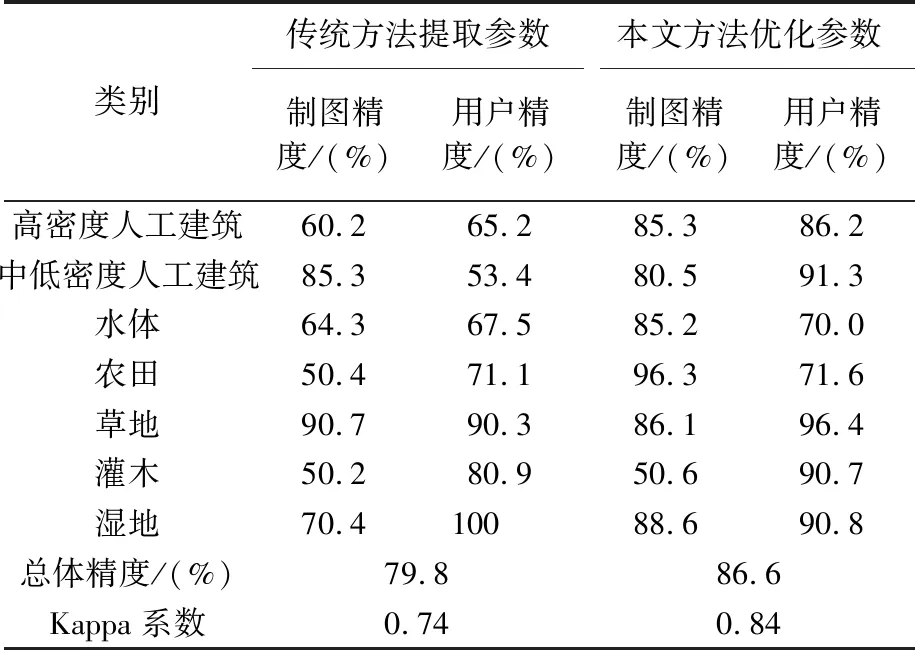
类别传统方法提取参数本文方法优化参数制图精度/(%)用户精度/(%)制图精度/(%)用户精度/(%)高密度人工建筑60.265.285.386.2中低密度人工建筑85.353.480.591.3水体64.367.585.270.0农田50.471.196.371.6草地90.790.386.196.4灌木50.280.950.690.7湿地70.410088.690.8总体精度/(%)79.886.6Kappa系数0.740.84
综合各数据的分类结果及精度评价,可以看出,使用本文方法提取的输入参数在纹理丰富区域优势显著;面向对象SVM分类方法能够有效区分离散分布的地物,提高分类的精度,保持地物几何特性。利用此法,绘制的研究区整体土地覆盖类型分布如图10所示。
3 结 论
相干斑噪声和有限的空间分辨率制约了合成孔径雷达获得可靠的地物分类结果。本文提出了一种利用光学影像优化极化参数的面向对象分类方法,同时结合两种数据源优点改善分类效果。本文方法的优势在于:
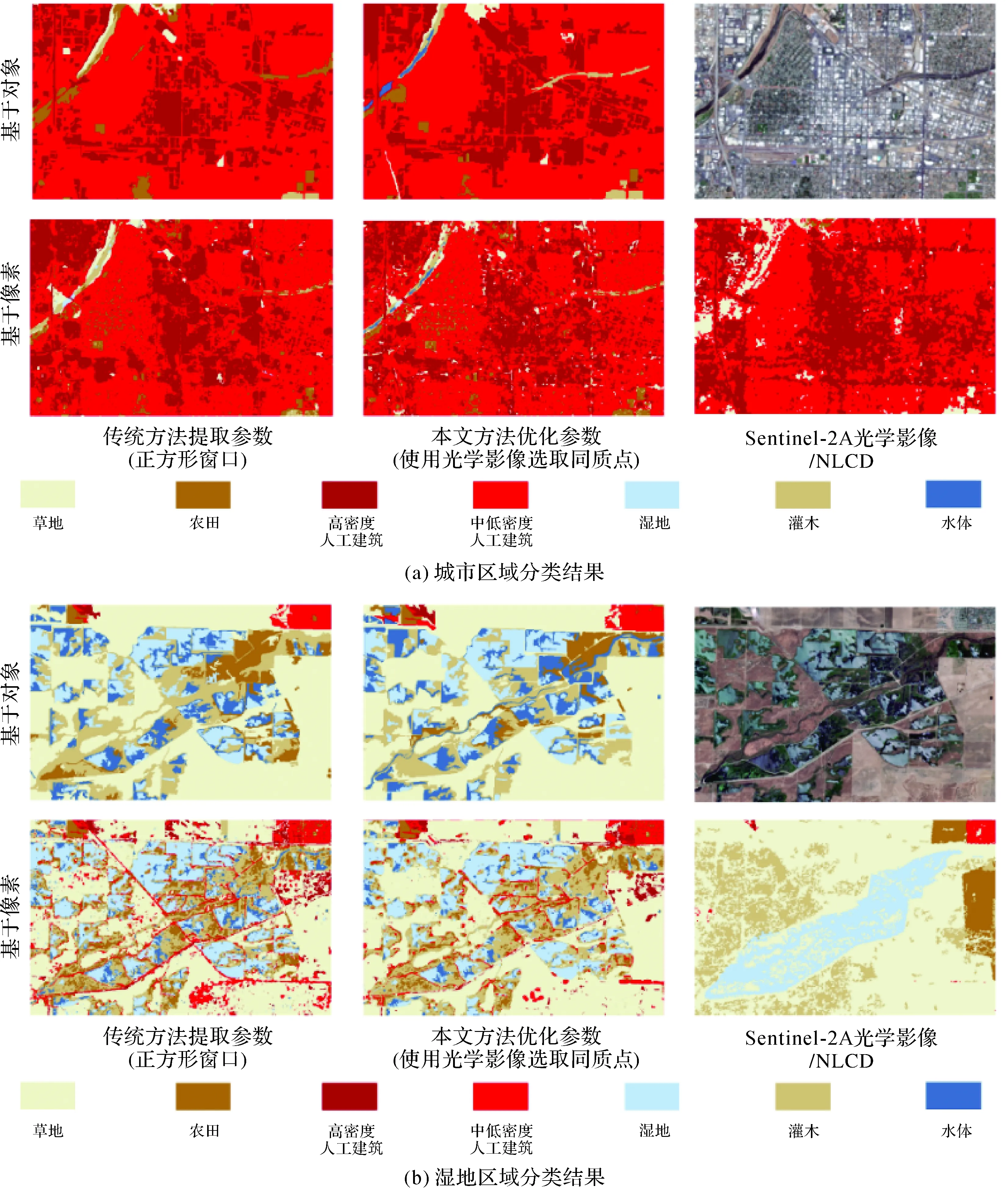
图9 不同输入特征和不同分类方法组合的分类结果比较Fig.9 Land cover classification maps obtained with different input variables
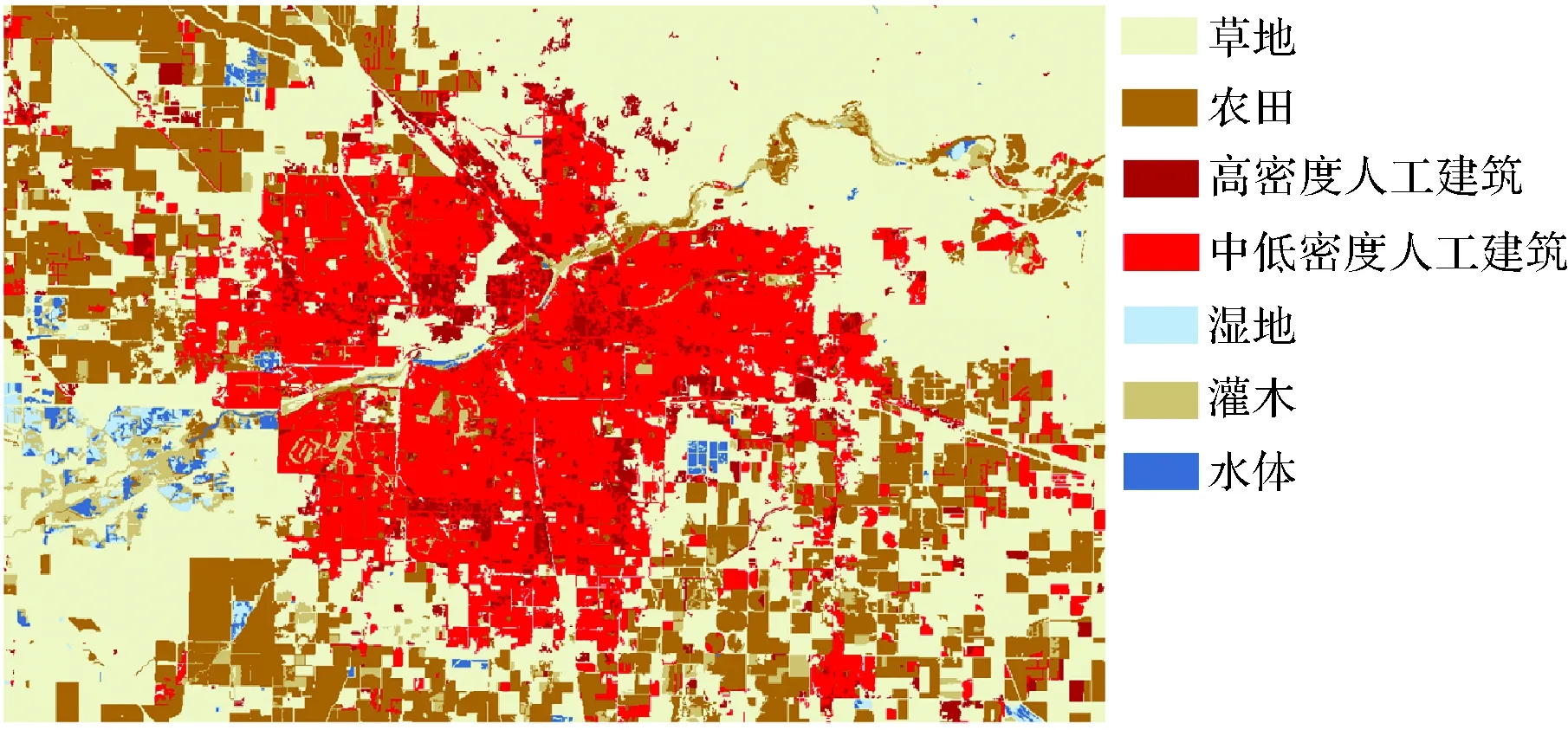
图10 使用改进参数的面向对象分类结果Fig.10 Object-based classification result using refined parameters
(1) 利用光学影像较高的光谱分辨率指导SAR影像选取同质像素,避免了噪声的干扰,较传统的正方形窗口,剔除异质点后极化参数估计更加准确,提高了对地物特性的分析能力。
(2) 结合极化特征和光谱信息,相似地物得以区分,弥补了光学和SAR影像各自的不足。同时利用光学影像分割结果,地物几何特征得以保留,在纹理复杂的城市和湿地区域分类表现卓越。
使用Sentinel 1/2数据进行验证,分类精度提高约10%,试验结果展现出了Sentinel-1 SAR和Sentinel-2光学影像在大尺度范围内土地覆盖分类方面的巨大潜力。虽然本文方法能够有效提高分类精度,保持地物边缘信息,但仅使用了一个时相的数据,未结合时变的物候信息,因而造成部分农作物与其他地物误分现象。结合多时相数据和多源数据,揭示地物在不同季节下的特性将成为今后的研究主题。
致谢:欧洲空间局通过哥白尼计划提供Sentinel系列卫星数据;美国地质调查局USGS提供全美土地类型数据