自谐振ZVS在无人机无线充电系统中的应用
2019-06-06张世杰王镜允孙学良曹春阳李定珍
张 迪,张世杰,王镜允,孙学良,曹春阳,樊 京,李定珍
(1.华中科技大学电气与电子工程学院,湖北武汉 430000; 2.南阳理工学院电子与电气工程学院,河南南阳 473000)
0 引言
无人机应用灵活、结构简单、易操作[1],广泛应用于卫星导航、提供通讯、救援和自然灾害防治等方面[2-3]。无人机大多用锂电池作为源动力,用有线设备补充电能,这造成了无人机航程短的缺点。如何方便快捷的为无人机补充电量成为急需解决的热点问题。近两年有人考虑使用无线技术为无人机补充电能,为电网巡查的无人机补充电量,以及通过悬停方式对无人机进行充电[4-6],这都用到了耦合线圈[7]。耦合线圈体积大,则增加无人机载重,影响其使用;线圈体积小,则传输距离和效率都会受到较大影响。文献[8-9]研究用新技术为无人机无线补充电能,但储存电量过低,无经济使用价值。
针对上述问题,本文设计了自谐振ZVS的无人机无线充电系统,作为无人机的补充能源平台,其无线传输功率大、工作频率高,不仅能降低无人机的充电时间,而且在满足大功率的同时又能减小无人机接收端线圈体积。并且对铁损和铜损进行详细研究后,减小了空载电路损耗,提升了系统传输效率。这都很好地适应了无人机载重小的要求。
1 无人机无线充电系统设计
该系统采用磁共振传输方式,用近场的电磁耦合传输能量,系统增加了2个耦合的并且自身品质因数很高的共振线圈,在空间中产生了更强的磁场,扩大了传输距离,适用于中距离传输场合。并且可在旷阔区域建立多处无线充电平台,解决无人机航程短的问题。由于无人机载重影响,该系统必须要尽可能做到质量轻、体积小。
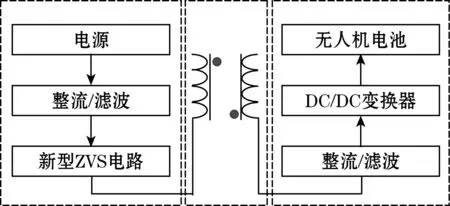
平台发射端 耦合网络 无人机接收端图1 无人机无线能量传输系统结构框图
无人机无线能量传输系统简要结构框图见图1。包括:平台发射端、耦合网络和无人机接收端。
平台发射端包括:电源、整流/滤波和新型ZVS电路,电源为220 V交流电,经整流/滤波变成直流电,再经过ZVS将直流电逆变成高频交流电输给耦合网络。耦合网络包括初级发射线圈和次级接收线圈,初级线圈将高频交流电通过电磁感应发射到次级线圈,次级线圈将感应到的高频交流电输给无人机接收端。无人机接收端包含整流/滤波、DC/DC变换器和无人机电池3个模块,整流/滤波部分将接收到的高频交流电变成直流电,再通过DC/DC将直流电调整为电池所需电压,为无人机补充电能。
2 ZVS拓扑结构原理分析
2.1 ZVS拓扑结构组成
图2是新型自谐振ZVS拓扑结构图。电感L1和L2的主要作用是使流入谐振回路的电流近似为方波,相当于两个电流源;逆变器由两个MOSEFT管Q1、Q2组成;谐振回路包括L、C、R,目的使拓扑结构能自谐振;Q1、Q2管驱动部分,包括肖特基二极管D1和D2(快恢复二极管)、补偿电容C1和C2、限流电阻R1和R2,主要控制Q1和Q2的通、断。
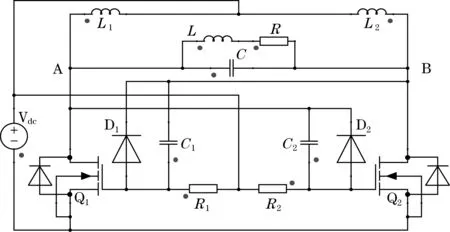
图2 新型自谐振ZVS拓扑结构图
2.2 ZVS拓扑工作原理分析
Q1、Q2的栅极起始驱动电压直接经R1、R2取自Vdc,并且栅极通过交叉连接二极管与谐振回路相连。电源接通时,Q1、Q2栅极起始驱动电压是由Vdc单独提供,此时电容开始充电,并且充电速度很快。Q1、Q2的开关转换是通过短路来实现的,即起始时两管导通,栅极电压会通过D1、D2接地导通放电,由于元件参数差异,会导致一个Q1、Q2栅极驱动电压过小而先被关断。随之两电容快速充放电以及D1、D2的作用,可使Q1、Q2能够实现快速的开关转换,其结果是可保持较高的工作频率而无较大的功率损耗,电路可实现自启动。起初Q1和Q2均会关闭,直流电源接通后,两者同时打开,并且会有部分直流电流通过电感L1、L2进入谐振回路,使谐振回路开始起振。Q1和Q2不能一直保持“开”状态,由于元件参数差异干扰,“开”一个开关,会使另一个开关的栅极驱动电压拉低,而使开关管关闭,谐振回路的起振使得开关Q1和Q2的“开”和“关”状态往复循环。
2.3 ZVS拓扑工作稳态分析
电路稳定工作时L1和L2交替与谐振回路串联,循环过程中两电感不会同时工作,因此可将工作的电感等效为电流源,图3是稳态电路等效模型图。
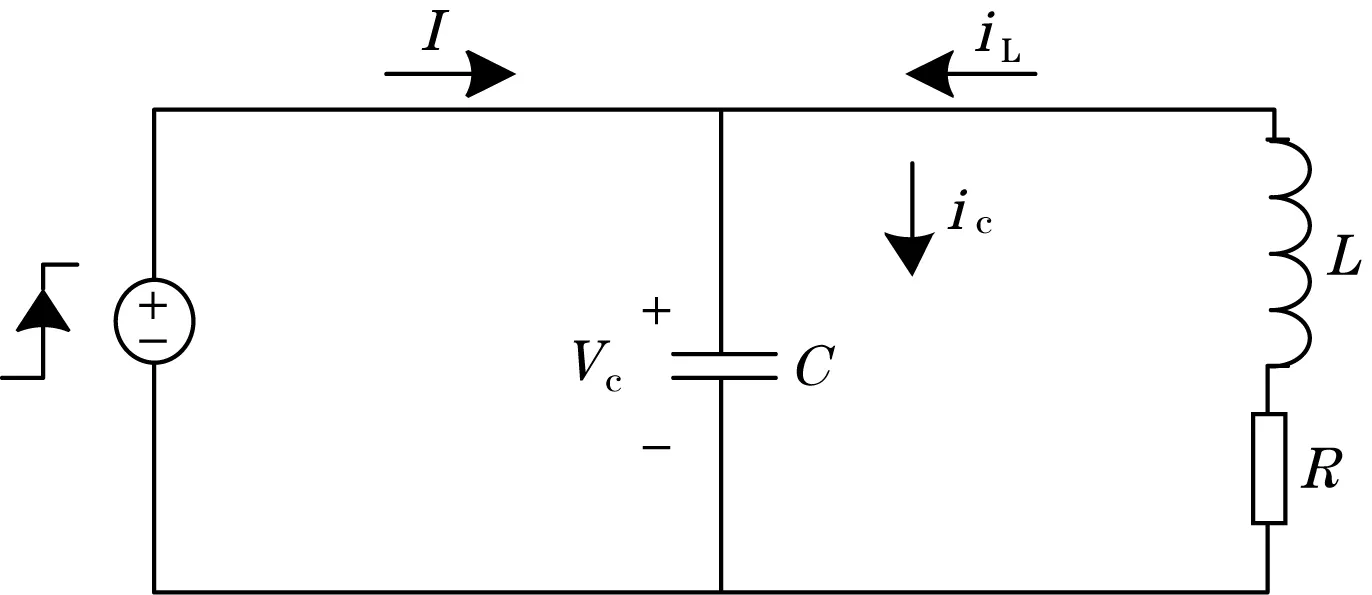
图3 电路稳态工作等效模型图
由图3电路可以得到vc的表达式:
(1)
一个周期循环结束时vc=0,即电路的初始值为
(2)
由初始条件,二阶微分方程通解可表示为
(3)
式中:θv为初始相位角;ωf为自振角频率,ωf=2πff。
每个循环周期结束时vc=0,则式(3)可以表示为
e[-τR/(2L)]sin(ωftz-θv)+sinθv=0
(4)
式(4)为非线性方程,无法求通解,所以采用数值方法求得ZVS的实际工作频率为fzvs=2/tz。
3 系统仿真实验及结果分析
3.1 系统仿真实验
无人机可以通过精准定位准确地降落到充电平台上,且线圈距离可近似认为不变,耦合系数近似为定值。采用Simplorer11.0搭建电路模型仿真[10],验证该电路在无人机无线充电的可行性。仿真模型如图4所示。由图中参数求得谐振频率约为87.6 kHz。
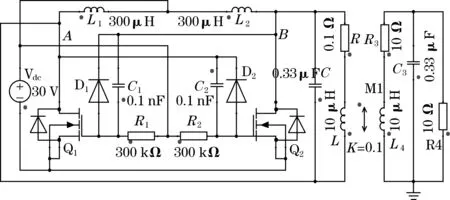
图4 搭建的仿真模型图
3.2 仿真结果分析
仿真可得C的电压vc与电流ic波形如图5所示。同时得Q2栅极电压与谐振回路A点的电压波形如图6所示。从图5的谐振电压电流波形图可以看出,并联谐振回路的最大电压幅值约为90 V,大约是Vdc的3倍,可为元器件的选择提供依据,并从仿真结果得到了电路工作频率是89.5 kHz,这是一个相对较高的工作频率。通过图6看到在A点电压较高时,D1被截止,Q1达到栅极门电压从而导通,此时Q1工作;B点电压较高时,D2被截止,Q2达到可以达到栅极门电压,此时Q2工作。
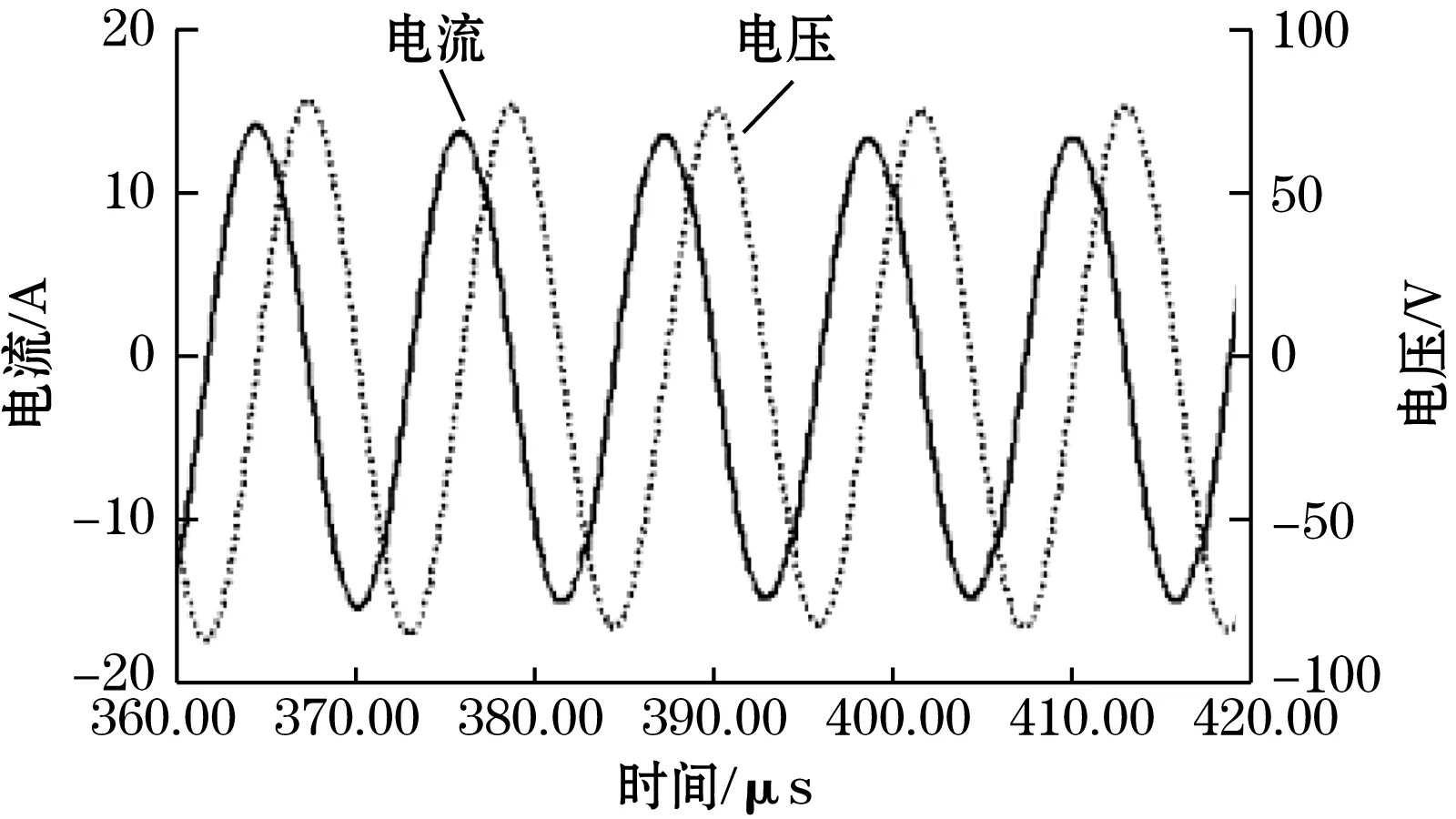
图5 88 kHz时谐振电压与电流波形
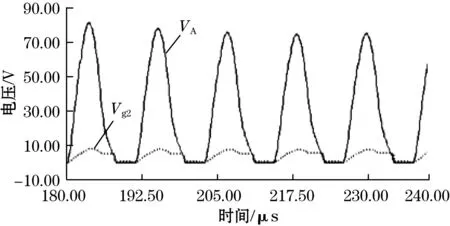
图6 Q2栅极电压Vg2与A点电压VA波形
通过Simplorer11.0也可得到谐振电感L3在不同频率下的电流相位角θ,如图7所示。从图7可看出频率在0~87.5 kHz时θ为-90°,频率由87.5 kHz上升到88.8 kHz时θ快速增加到9.6°与θ=0有一个交点。当频率由88.8 kHz增大到92.1 kHz时θ角又快速降低到约-90°,并且与θ=0有一个交点。
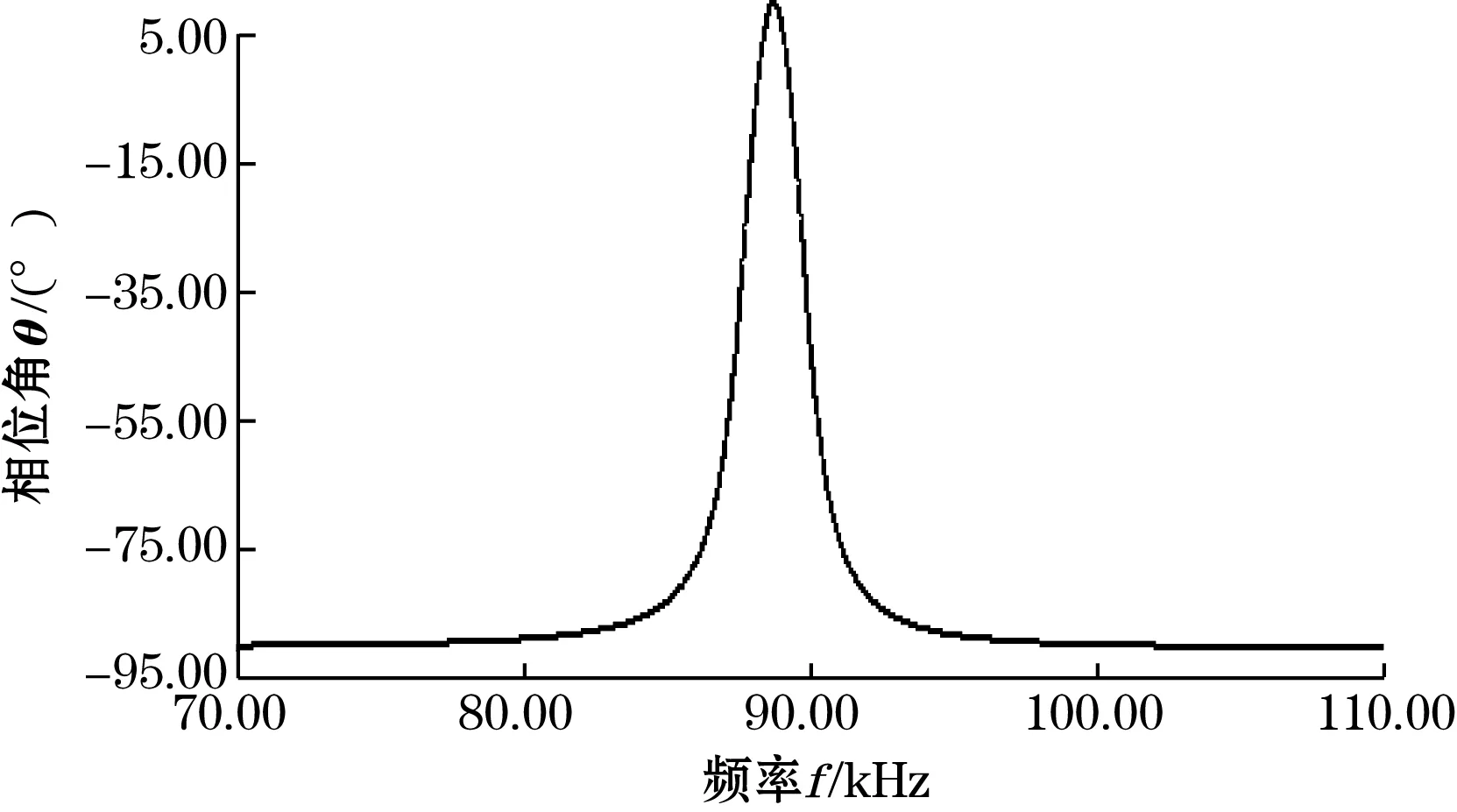
图7 不同频率下的电流相位角θ
通过图7的不同频率下的θ值,可以计算出电路在不同频率下的Pin、Pout以及电路的传输效率。如图8所示。从图8的Pin、Pout、efficiency三幅仿真图可得到电路的最大输入与输出的工作频率约为90 kHz,但最大效率工作点在78 kHz左右,可以看出最大功率传输工作频率与传输最大效率的工作频率之间是不相同的。而无人机的充电需要尽可能的缩短充电时间,因此电路工作频率为90 kHz时能够以较大输入与输出功率充电,缩短无人机充电时间。
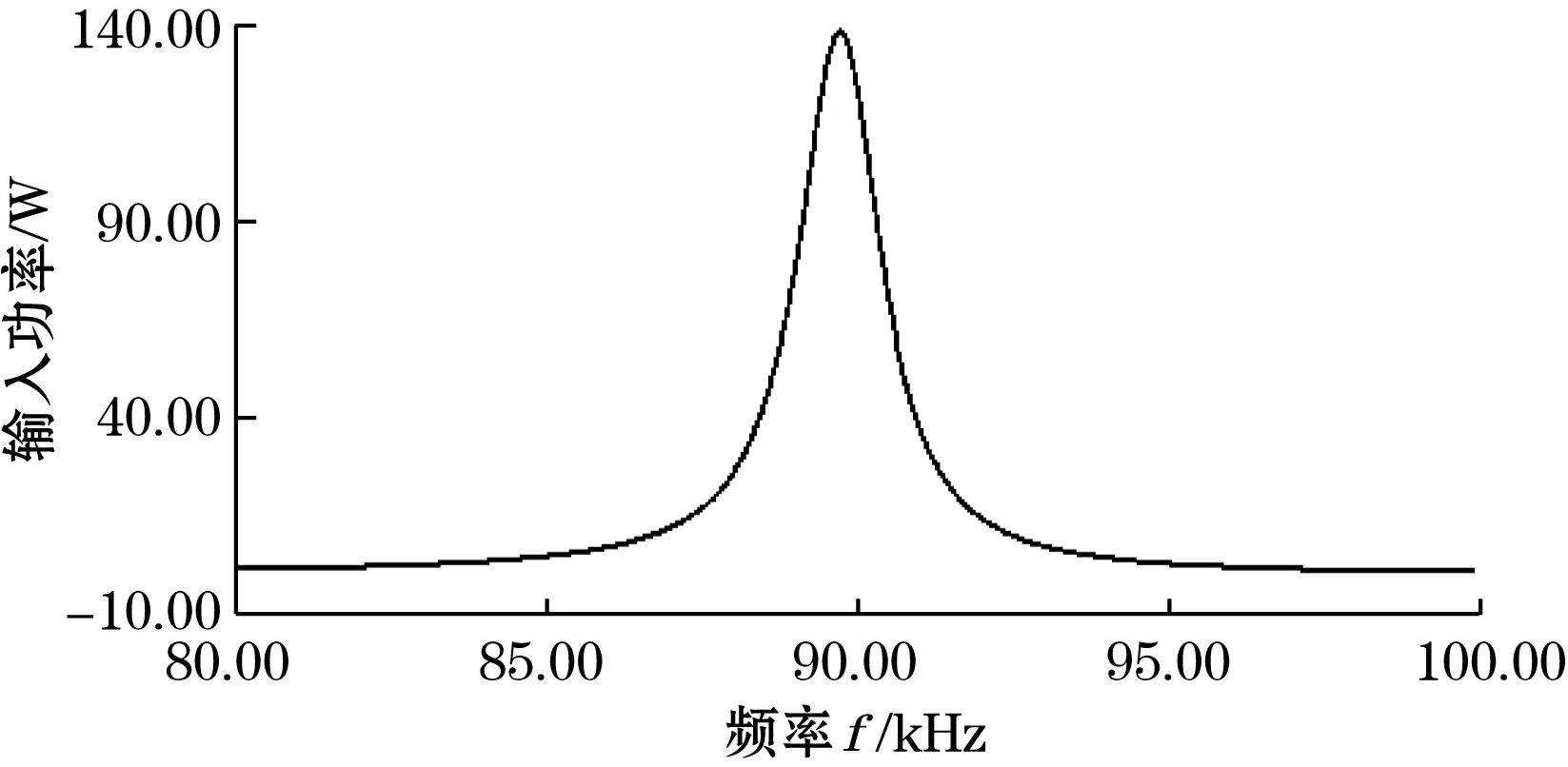
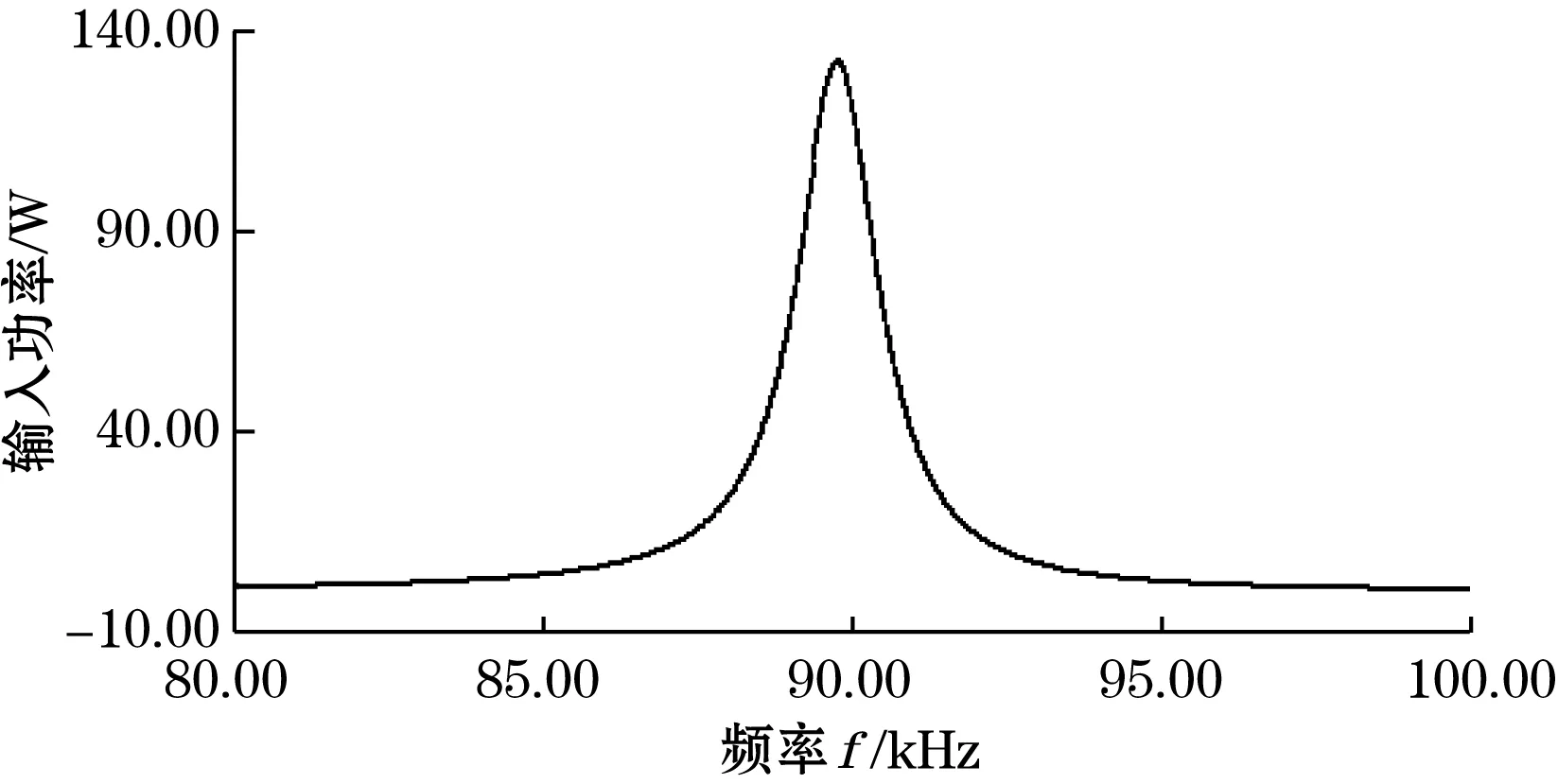
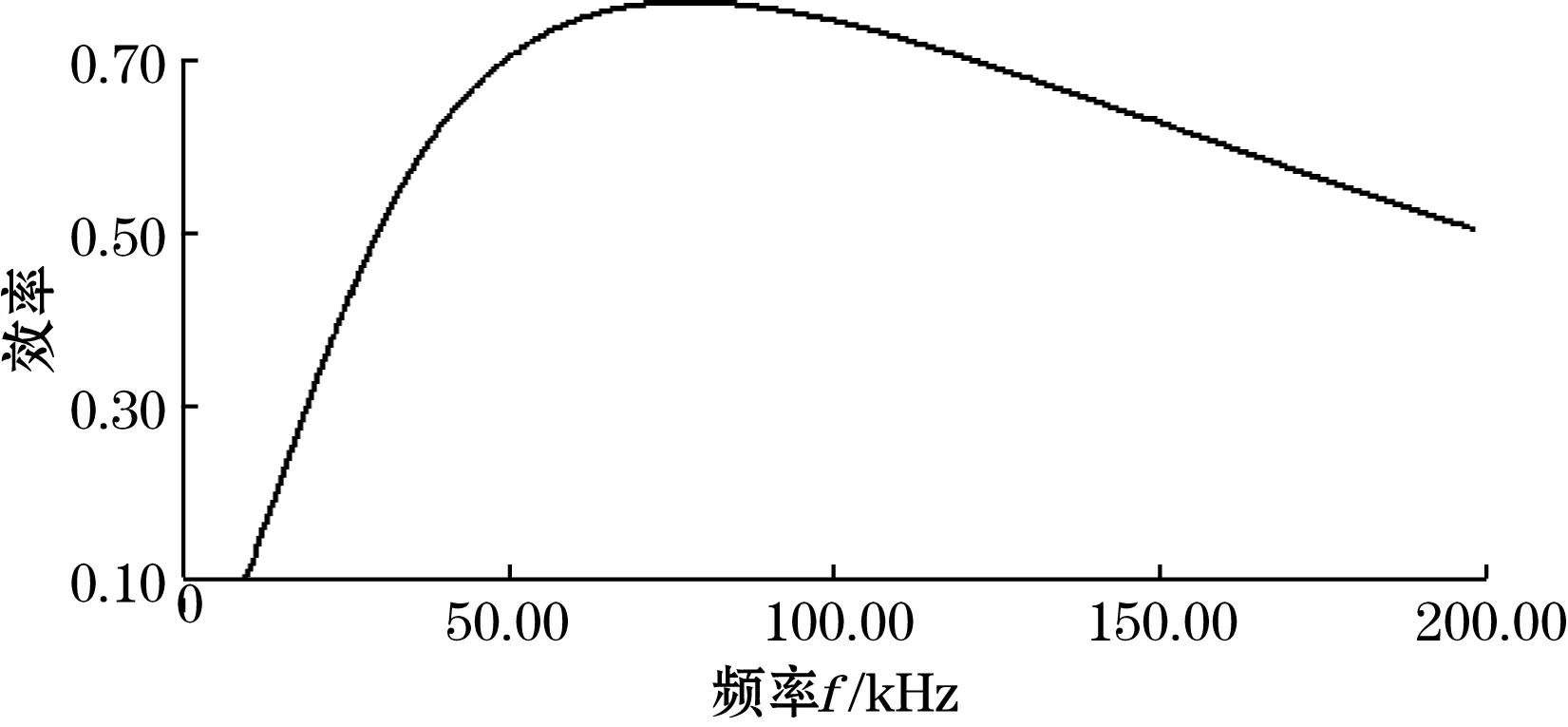
图8 输入输出功率及效率波形
4 系统实验与功耗分析
4.1 系统实验
综合理论分析与仿真实验的结果,基于仿真模型,搭建了对应的为多旋翼无人机电池充电的无线充电系统模型,此系统以ZVS结构为发射核心电路,使用直流电源代替了系统中工频交流电的整流滤波模块。
利用示波器得耦合过程中谐振回路的工作电压如图9所示。从图9中可以清晰看到谐振回路的周期时11.20 μs,谐振频率是89.28 kHz,谐振输出电压最大91.20 V,最小-91.20 V,峰峰值是182.40 V。
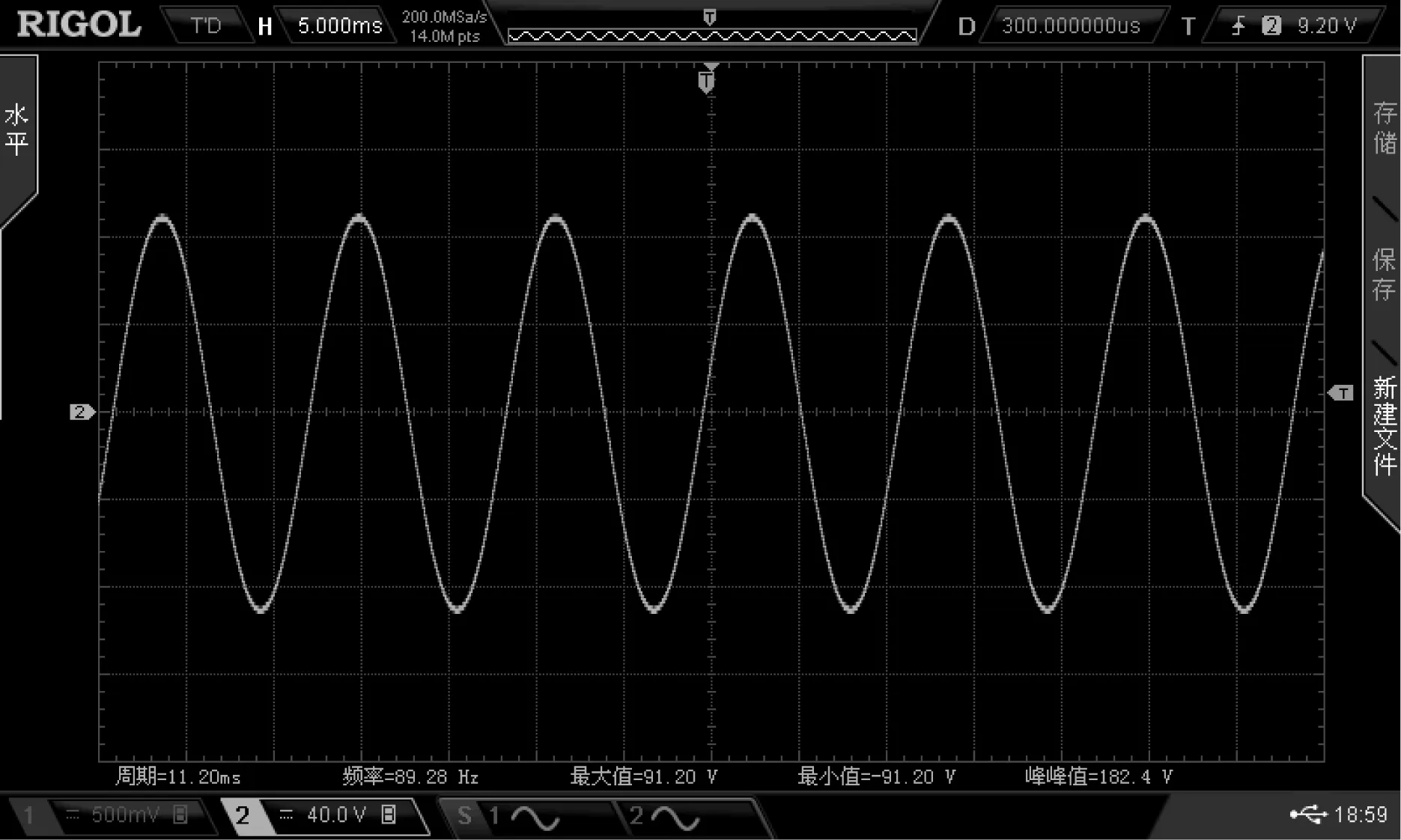
图9 谐振回路的工作电压波形图
在正常工作条件下,经测量,电路输入电压为30 V,电流为5.50 A,即输入功率为165.00 W;此时电路的输出电压是26 V,电流为5.00 A,即输出功率为130.00 W。可求得效率为78.79%。
对电路的输入、输出功率进行研究,发现实验数据与仿真数据差别不大,说明该系统可以在较高的工作频率下,依然能以较高功率对外传输。
4.2 功耗分析
测量电路空载时损耗为8 W左右,用温度探测仪测温,发现电感发热最严重,电路工作5 min温度就达到65.3 ℃。损耗主要由电感发热造成,使效率较低。因此该电路效率需要进一步提高,办法是把线圈L1、L2的发热问题解决。
理想电感不消耗有功功率,只储存磁能;而实际电感线圈有铜损和铁损,消耗有功功率。因此可通过减少电感线圈的铜损和铁损来降低功率损耗。
4.2.1 铜损研究
铜损主要是指在非零电阻导体中通过电流时产生的热量损耗。热量损耗功率有效值用式(5)计算:
(5)
减少铜损的方法:选用低电流密度;减少线圈匝数及层数;增加铜线股数,可增加每股铜线的直径;降低电路的工作频率;采用更低电阻率的铜线。
选用长度同为60 cm的几种不同材料的多股线进行电阻测量。将不同材料的线拉直固定在测量板上,使用电桥测量频率为1 kHz、10 kHz、20 kHz、100 kHz、1 MHz的电阻值如表1所示。经比较,最终选用Laz线作为绕制线圈的材料。
4.2.2 铁损研究
系统中的铁损有Ph、Pe及Pr,这是由于磁芯的存在造成的。损耗的大小取决于磁芯的材料、f、Bm和磁芯的电阻率。铁损功率计算公式为
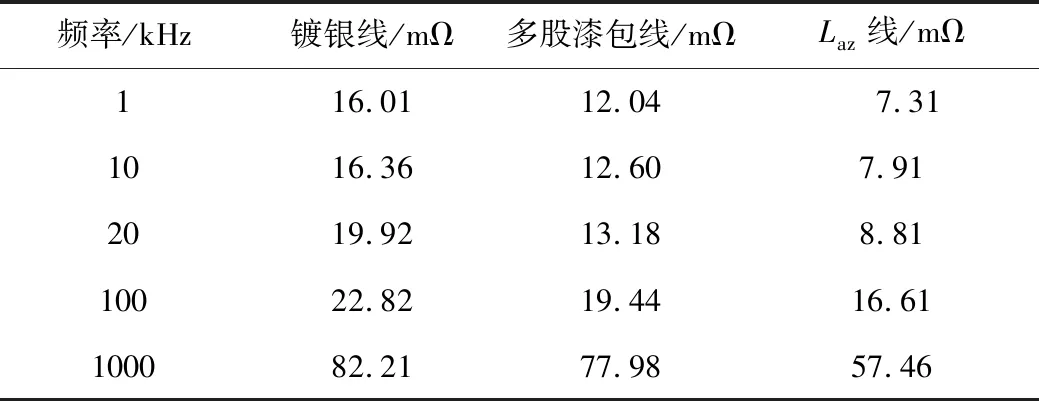
表1 多股线的电阻值
Pc=Ph+Pc+Pr
=f
(6)
式中:Ph为磁滞损耗;Pe为涡流损耗;Pr为剩余损耗;C为常数;f为工作频率;Bm为工作磁通密度。
工作频率和磁通密度越低,电导率越大,铁损变小。同样在无人机充电的ZVS中,工作频率只能较高,不能降低。若降低线圈的磁通密度,会相应的增加线圈匝数,导致铜损增大,在铁损大于铜损时适用于此方法。
采用铁硅铝的磁芯绕制电感线圈,电感值为246 μF时,相比于用普通的磁芯绕制的线圈,发射端空载损耗从3.359 W下降到1.889 W。
5 结束语
无人机无线充电要求高频率、低功耗、高功率。本文以多旋翼无人机无线充电为研究背景,提出了一种结构简单、成本低的新型ZVS自谐振拓扑结构。为了将该拓扑应用到无人机无线充电上,对如何减小接收线圈的体积和质量,以及减少电路功耗展开详细研究,并得到了较好效果。
通过对电路进行仿真和实验分析,得到新型ZVS可以提升工作频率、降低电路损耗,使充电过程简化。不仅验证了该电路能减小接收和发射线圈的体积和质量,而且还解决了空载功耗较高的问题。
综合理论分析与仿真实验结果,后通过实物实验,验证了应用于无人机无线充电的改进型ZVS电路工作频率显著提升,验证了该系统的可行性。
