测量教学无人机的设计与应用
2019-06-05王星捷
王星捷
(1. 核工业西南物理研究院,四川 成都 610041; 2. 成都理工大学工程技术学院,四川 乐山 614007)
利用无人机进行低空航空测绘是目前工程测量重要的发展方向[1]。在实际使用中,其速度较快,测量结果精度较高,应用范围与方式不断的多样化。无人机航空摄影测量在工程测量行业及其他相关领域的实践应用中都有很大的行业应用价值,因此,在测量教学中无人机测量是当今重点的发展方向。
针对高校的教学测量,通过对学校的地理情况的实际分析发现,无人机产品在测量教学上存在一些局限性,如场地限制、购置成本高[2]、维护复杂及飞手训练成本高等。
综合产品无人机的弊端,本文与学校测量教学实际相结合,研究了各项参数,自制了测量教学无人机,用于在教学上代替专业测绘产品无人机。相对价格高昂的测绘无人机来说自制无人机的制造成本仅6000~8000元,而其测量效果基本上可满足日常的航空摄影测量的教学需求,同时自制无人机也填补了航空摄影测量校园教学设备上的空白。
1 无人机产品在教学中存在的弊端
1.1 校内场地限制
学校最大的场地为学校的运动场,相对无人机起降还是较小。通过实际测量,学校运动场能为无人机起降提供安全的距离为100 m。而校园内环境复杂,无人机飞行高度本身不高,且校内树木较多,房屋教学楼密集,飞行器容易与这些障碍发生碰撞,造成安全事故,而且在大风环境下起降对无人机本身会造成极大的安全威胁。
目前市场上的大部分测绘级无人机体积相当庞大。如中海达公司的iFly U5型测绘无人机,该机单机体尺寸就达到了2.2 m×0.8 m×0.225 m,即翼展达到了2.2 m,机体满载达到7.5 kg。如果使用该机在学校进行测量教学,那么将会面临起飞后无法安全降落这一难题。多款测绘无人机具体参数见表1。
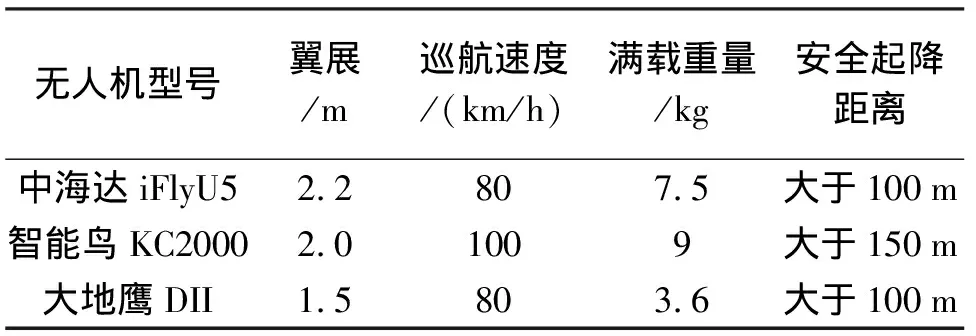
表1 测绘无人机参数对比
通过表1中几款无人机的数据对比,能直观感受到专业测绘级无人机对降落场地的要求较高,即便是采用开伞降落的方式,也需要是在松软地面、开阔场地的情况下进行。
1.2 购置成本高
测绘无人机购置成本相对较高。目前主流测绘无人机价格对比见表2。

表2 价格对比
通过表2的价格对比,能直观地感受到一套测绘无人机系统的成本非常高,而且稍微有操作不当就会造成极其高昂的经济与设备损失。
1.3 维护复杂
通过对目前主流无人机的架构及性能分析,得到如下结论:
从无人机动力源来看,目前小型无人机大多采用锂聚合物电池为飞机提供动力,留空时间远不及使用燃油的大型无人机,而且电池对保养要求极高,稍有不慎,过度放电等就会对电池造成不可逆转的损坏,其带来的直接结果就是续航时间大幅减少,且锂聚合物电池在低温环境下放电能力不佳。
从锂聚合物电池的特性可知,零摄氏度情况下电压比常温20摄氏度下,下降速率快70%左右,同时降压点比常温提前了近一半时间,而且低温放电同样会损害电池电芯,长久以来续航时间只会越来越少。
1.4 飞手训练成本高
从无人机飞手的训练时间上来看,训练一个无人机飞手极其耗时,假如飞手有一定基础,那么训练一个无人机飞手也需要一到两个月,而在这期间需要进行大量的实际飞行训练,且耗时费力,需要消耗大量的时间。在实际飞行训练中也可能发生各种意外导致飞机损坏,这些都是直接的经济损失。无人机飞手首先需要进行理论知识的学习,包含飞行器原理、电路原理、空气动力学等科目;在电脑上通过模拟软件进行飞行训练;当模拟飞行训练达到一定水平后,由教练进行带飞训练,通过两个遥控器控制一架飞机的模式进行实际飞行;最后达到能单人进行起降飞行后可进行单机放飞实操。
2 自制无人机设计
综合上述弊端,通过对校园的实际地理情况进行考察,发现学校内树木较多,教学楼与宿舍楼较为密集,平地较少,且存在人工湖区,平地开阔地带狭小,不具备起降固定翼无人机的场地条件。同时校内电磁环境较为复杂,移动手机信号基站数目多且分布密集,校内安保所使用的对讲机数量多且功率较大,对无人机数据通信及遥测产生较大干扰。
因此自制教学测量无人机选用多旋翼无人机为飞行载具。多旋翼无人机通常轴距在500~1600 mm之间,可进行垂直起降作业,稳定性比传统的固定翼无人机好,同时航飞速度也可以随意控制,可以做到在任意拍摄点上悬停。且在短时间内即可完成对多旋翼无人机的操控学习。
自制教学测量无人机飞行硬件平台由无人机机体、飞行控制系统、动力系统、通信系统、电源系统、操控系统、影像系统、定位导航系统组成。自制教学测量无人机设计指标参数见表3。
2.1 飞行平台
无人机机体采用六旋翼[3]作为飞行平台的基本架构,六旋翼无人机具有6个动力设备,其可靠性及抗风性都远高于传统的四旋翼无人机,且在失去一个动力设备的情况下依然可以安全的降落,该机主要使用碳纤维作为机体主要材料。机臂于中心板连接折叠件采用6051-T651标号铝合金制造,通过阳极氧化处理后外形美观、不易磨损氧化,可折叠的设计大幅降低无人机空间占用率,方便收纳及储存。其机臂采用18 mm空心碳卷管制造,重量轻强度高。
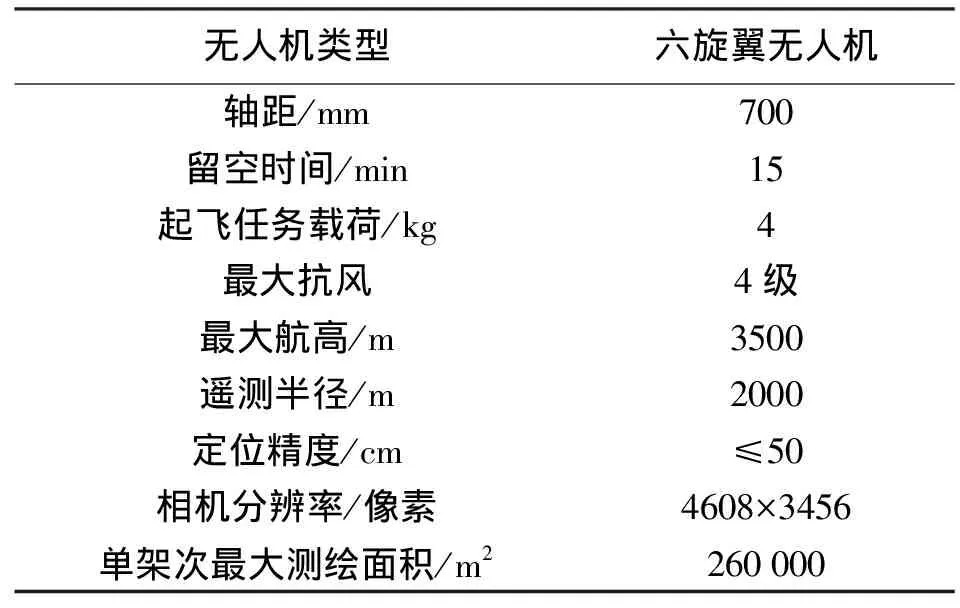
表3 自制教学测量无人机设计指标
2.2 航电系统
(1) 飞行控制系统采用先进的Pixhack飞控,该飞控板搭载32位STM32F427 Cortex M4处理器及STM32F103备份协处理器,飞控采用IMU(惯性测量单元)分离设计,避免了飞控内部的电流干扰;其内置通用性减震设计在配合外置飞控减震垫的情况下大幅降低飞行平台带来的高频振动,同时提高飞行稳定性,保障了无人机的安全。飞控板上同时内置了L3GD20三轴数字陀螺仪、LSM303D及MPU6000三轴加速度计及磁力计,同时配备MS5611高精度气压计,以满足±10 cm高精度的定高需求。
(2) 动力系统采用了国内非常成熟的DJI(大疆创新)E600动力系统,采用了无刷电机为动力,具有寿命长、可靠性高、高效省电的优势,同时电机轴采用了自紧正反螺纹的设计,避免了装错螺旋桨和因为电机转速突然降低导致的射桨,提高了飞行的安全性。
(3) 通信系统采用915 MHz的数传电台,与飞控采用57 600波特率Mavlink通信协议,功率在100 MW时可实现在1 km的可视空距距离与无人机进行实时无线通信。
(4) 电源系统采用22.2 V 8000 mAh锂聚合物为动力来源,通过电流计将总电压降为5 V 3 A的电流供给飞控及其他电子器件使用。
采用该套电源系统可为无人机提供长达15 min的续航时间,该无人机可在航带高度110 m情况下进行单架次测绘800 m×300 m的矩形区域测绘作业,根据校园占地面积为866.67 km2,该无人机航飞4~5个架次即可完成对整个学校的低空摄影。
(5) 操控系统采用国内成熟的天地飞8遥控器,可使用9通道PPM接收机,采用DSSS扩频和FHSS调频技术,抗干扰性极强,其遥控半径为1 km可视空距。自制无人机采用了较为便宜的遥控器作为无人机操作器,其价格低廉,同时通道数(一个通道控制无人机一种功能或飞行模式)相对测量无人机来说处于刚好够用的数量,避免了通道浪费。
(6) 定位导航系统采用U-blox M8导航模块,可并行接收GPS和GLONASS或者北斗信号,也可同时接收GLONASS和北斗信号,导航模块同时也内置了罗盘,保障了飞控导航的安全性。其定位精度HDOP值能达到0.5~1,满足测绘使用需求。
2.3 航摄系统
该机影像系统采用三轴无刷电机云台及鹰眼6s运动相机组成,三轴无刷电机云台下挂于飞行器正下方,可进行正摄和倾斜摄影。选取该相机基本符合在测量教学任务上的精度需求,同时具有价格低廉、不易损坏、可防水等特点。相对较专业的全画幅单反相机,运动相机具有价格低廉、重量轻的优势,同时在画幅上基本达到4 K的图像尺寸,满足了测量教学的基本需求。
2.4 系统软件组成
航飞作业及影像处理不同于一般的航空测绘,为了确保成像质量,需要进行较为精确的规划,此时需要航摄任务规划软件,在航飞完成后需要航摄影像处理软件[4]。在自制教学测量无人机系统里面采用Missionplanner无人机遥测软件及Pix4D mapper图像处理软件。
3 自制无人机教学应用
本教学应用主要使用自制无人机对学校内部分区域进行航空摄影测量、空三测量,采集航片。并通过Pix4D软件对航摄采集的信息进行处理。
测区面积约0.26 km2,西起学院正门,东至南坡丁字路口,北到万景园宿舍,地形多为平地,地势东高西低,且中间为人工湖,呈三级阶梯分布,高度由东向西递减。测区范围如图1所示。
根据被测区域面积,将该次测绘分为一个区域,同时结合自制无人机的续航时间,得出该次试验任务时间大致为10~15 min。
本次试验任务的相机为Firefly6s,其像元大小为0.005 45 mm,1∶2000对应地表分辨率为0.2 m,镜头焦距为3 mm。通过H=(f×GSD)/a=(3×0.2)÷0.005 45=110 m,得出自制无人机航飞高度设为110 m,曝光间距为51 m,曝光间隔为10.16 s。
依据地形图航空摄影测量[5]规范的要求,其航向重叠率为70%,旁向重叠率为60%。每条航带末端设置10 m的缓冲范围,使无人机在测区外部进行转向及校准航向[6],以更好的飞行航向进入测区。整个航飞任务时长预计14 min,共采集121张航摄像片,及其对应的外方位元素,航线如图1所示。
根据航飞任务的航带数量,控制点基线数为4条,控制点数量为8个。通过全站仪,GPS等采集控制点[7]信息,控制点见表4。
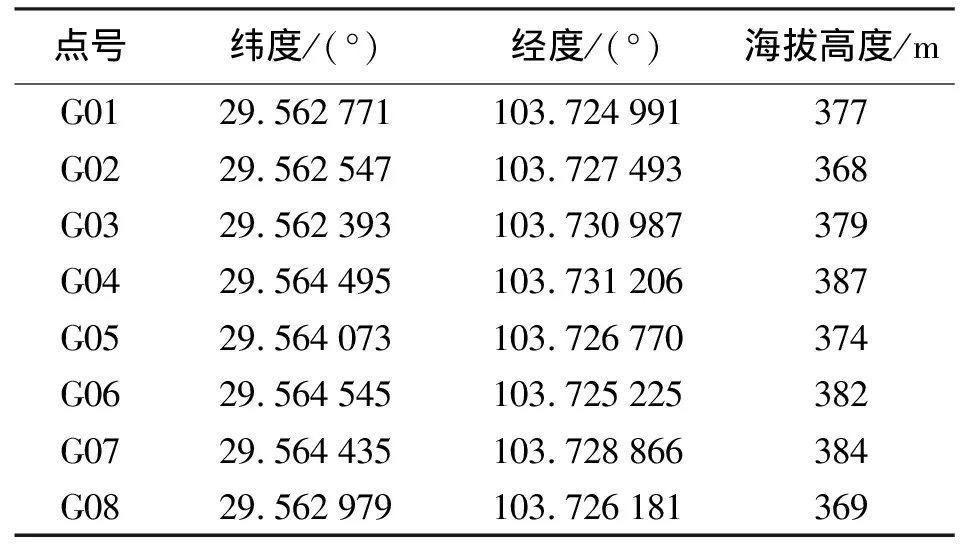
表4 控制点
4 试验分析与数据处理
在本文试验中数据分析和处理的软件主要使用Pix4Dmapper软件,这款软件可以实现全自动空三测量,并自动生成DSM、DOM[8]和数字点云[9]。
4.1 飞控原始数据分析整理
首先将飞控原始数据导出,通过分析整理出所需外方位元素。对原始的POS数据进行修正、筛选,删除不必要的数据,并对航拍图像数据进行编号等处理,数据格式的处理,采用Pix4Dmapper软件进行修正,设置对应试验项目的坐标系,将修正后的POS点数据导入试验项目中。
4.2 像片纠正
由于自制无人机采用的相机为Firefly6s相机,这款相机的镜头为鱼眼镜头,拍摄的单张照片边缘畸变较为严重,在做好像片导入工作后,进入图像编辑器进行相机参数矫正。
4.3 控制点导入与刺点
在将相片和POS点导入之后,开始进行控制点的导入,该软件支持TXT和CSV格式的控制点文件,在本次试验中使用的是TXT格式文件,在添加控制点文件时应该注意选择控制点所对应的坐标系,本次使用的为WGS-84坐标系,刺点过程如图2所示。
在进行控制点选点的过程中,软件会根据该控制点自动对可能含有该点位的像片进行预览,通过放大及平移操作,将控制点放在该点所对应的图像参照物上面。一个控制点一般情况下应该在两张图片上同时被刺出,以保证其精度。在完成控制点刺点后,进行全自动的高精度处理、空三加密。
通过对输出的质量检测报告的分析得到,其图像数据集中的121张航片与97张得到校准,占总照片数的80%,有部分照片未能被校准,未被校准的部分照片为水域或密集树林,不在有效处理区域范围内。相机优化前参数与优化后参数差值为20.54%。质量报告如图3所示。
控制点实测点与Pix4D计算点精度对比见表5。
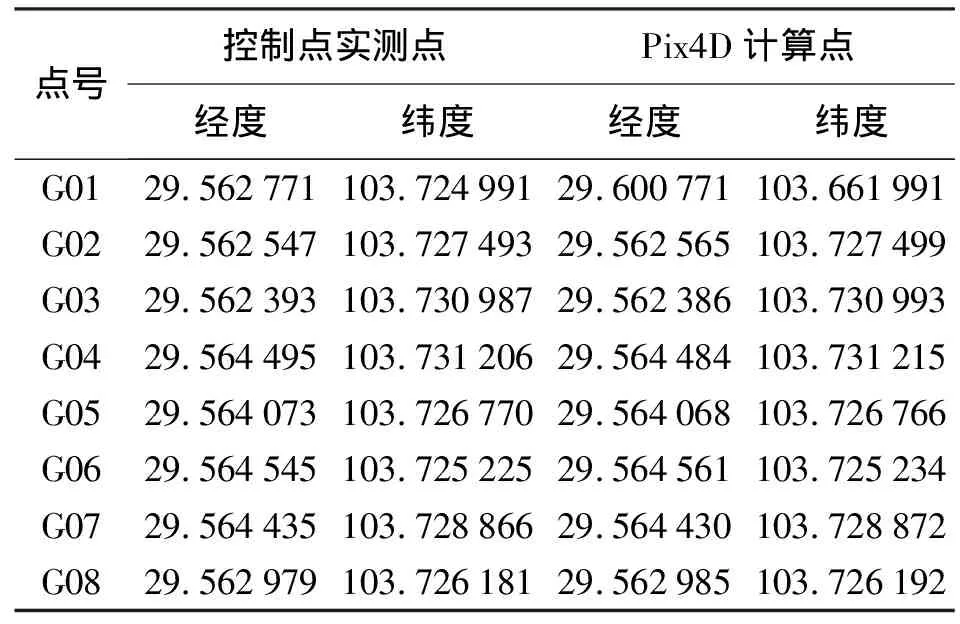
表5 数据精度对比 (°)
通过对质量检测报告中的控制点误差统计的分析,根据《数字航空摄影测量空中三角测量规范》对1∶2000测图精度要求,平面位置误差:平地和丘陵为0.7,山地和高山地位1.0。
学校从宏观角度来看属于平地地形,所测数据的精度误差均在0.7以内,符合精度要求。
在完成前面的高精度处理之后,已经对控制点进行了规划,之后只需进行空三处理,以及DSM与DOM的生成。
软件生成密集点云模型,在点云模型中,每一个点都包含了三维坐标及颜色信息[10],如图4所示。
数字表面模型的生成,数字表面模型是对地表真实起伏情况的数字化描绘,其颜色深浅变化代表了其起伏的变化,颜色越深,地势越高,如图5所示。
正射影像图生成,正射影像图是对航摄像片进行纠偏及拼接[11],按制图需求裁剪的数字影像集。具有高精度的几何形态及影像特征,如图6所示。
5 结 语
本文重点分析了当前无人机产品的特点及其在校园教学测量中的弊端,探讨了一种低成本、高效率的自制无人机的设计。通过分析校园的地理情况和教学的需求,对无人机的各项参数进行了分析对比,设计了适合校园教学的测量无人机。根据设计的自制测量无人进行教学设计,试验教学的具体应用,以及后续的数据分析和处理,通过具体的试验分析,得出的数据符合《数字航空摄影测量空中三角测量规范》的要求,同时也展示了点云模型、数字表面模型以及正射影像图生成的远离和过程,完成了实际的航空摄影测量教学的内容。证明了本文设计的测量无人机满足了日常的航空摄影测量教学的需求,同时为高校航空摄影测量教学无人机设备研究提供了技术性和理论性的参考。
