菲涅耳非相干数字全息大视场研究*
2019-06-04汤明玉武梦婷臧瑞环荣腾达杜艳丽马凤英段智勇弓巧侠
汤明玉 武梦婷 臧瑞环 荣腾达 杜艳丽 马凤英 段智勇 弓巧侠
(郑州大学物理工程学院,郑州 450001)
1 引 言
全息术通过干涉记录物体的振幅和相位信息,利用衍射原理重现出物体的三维形状,实现了真正意义上的三维(3D)成像[1-4].近年来,随着计算机、高分辨率电荷耦合器和空间光调制器的进步,数字全息术得到迅速发展,非相干全息术的提出突破了全息记录必须使用相干光照明的局限,发挥出了独特的优势,其中Brooker和Rosen[5]提出的菲涅耳非相干相关全息术(FINCH)受到人们的广泛关注[6-12].FINCH技术记录过程中无需扫描、移动任何光学器件,可以快速获取物体的三维信息,实现了共路同轴的非相干数字全息记录,相比于传统的非相干成像系统具有更高的分辨率和稳定性,成为非相干数字全息术中最为重要的一个研究方向.FINCH技术研究主要集中在三个方面[13-19]:1)FINCH成像机理研究,并利用各种技术如合成孔径技术进一步提高FINCH成像分辨率;2)FINCH技术再现算法研究,主要目的是提高再现像质量;3)FINCH技术应用研究,利用FINCH系统实现荧光显微成像、层析成像、共聚焦显微成像等,而提高FINCH成像的视场一直未受到大家关注.
人们通过不同方法与技术提高数字全息记录视场。吴永丽等[20]利用波长复用、偏振复用和角分复用技术,将数字全息记录视场增大将近四倍.Kim等[21]通过合成孔径技术提高数字全息视场.Tahara等[22]采用角度复用和空间带宽增强的数字全息方法,有效扩展了记录视场.但这些方法实验系统复杂,操作繁琐,不利于实际应用.本文首次提出了一种基于SLM提高FINCH记录视场的方法,在保持FINCH成像高分辨的同时能够有效扩大系统的成像视场.且整个成像系统结构简单、操作便利,记录过程中只需通过计算机更换加载在SLM上的掩模,从而调控成像系统光源的位置,最后获得几幅有一定重叠的子图像,将子图像拼接成为整幅大视场图像,实现了FINCH系统的高分辨率大视场成像.
2 FINCH大视场成像原理
图1所示为FINCH系统成像原理示意图,系统主要由准直透镜、SLM以及CCD组成,并采用非相干光照明.由物点发出的球面波经准直透镜后传播至SLM上,SLM上加载双透镜模式,如图2(d)所示掩模,透镜光轴在SLM幅面的中心,透镜焦距分别为fd1,fd2,将来自物点的光波分割成两束曲率半径不同的自相干光,最后由CCD完成记录.由于CCD和SLM的直径一般只有几毫米,尺寸远小于系统中其他光学元件(如透镜直径为几十毫米),因此与光学全息成像系统相比,FINCH成像系统视场较小,最适用于显微成像方面.

图1 FINCH系统成像原理图Fig.1.Schematic diagram of FINCH imaging system.
根据Rosen等[15]对FINCH成像过程的理论分析,CCD上能记录的通过SLM两束自相干光的最大重合半径即为SLM半径.图2为FINCH大视场成像原理图,根据视场角定义,SLM所能记录的光束范围如图2(a)所示,SLM直径以表示,当加载图2(d)掩模时,其所能记录的视场角大小为2ω,即:


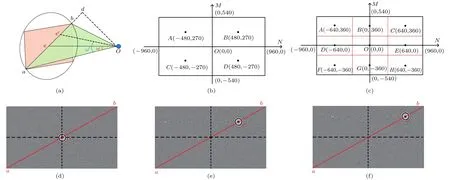
图2 FINCH大视场成像原理图 (a)SLM记录视场角;(b)四次记录光轴中心位置;(c)九次记录光轴中心位置;(d)光轴中心处于图(b)中O点时的掩模;(e)光轴中心处于图(b)中B点时的掩模;(f)光轴中心处于图(c)中C点时的掩模Fig.2.Schematic diagrams of FINCH with large field-of-view imaging:(a)The recording field-of-view angle of SLM;(b)the central position of the optical axis for recording four times;(c)central position of optical axis for recording nine times;(d)optical axis center is at point O of (b);(e)optical axis center is at point B of (b);(f)optical axis center is at point C of (c).
图3 双透镜光轴中心处于四个不同位置的掩模Fig.3.The masks with the center of dual-lens optical axis in four different positions.

在整个记录过程,将SLM上加载的双透镜掩模按照图2(b)所示方式依次更换光轴中心的位置(掩模如图3所示),分别进行FINCH记录,并将各视场的子图像拼接融合获得大视场图像.结合(2)式和(3)式,可以计算出SLM的有效记录范围增大至原来的2.25倍.如果按照图2(c)所示方式改变掩模双透镜光轴中心的位置(如图2(f)所示),当图2(d)中的c点移至图2(f)中的c”点时,同理可以计算出SLM的有效记录范围增大至最初的2.77倍.假若将SLM幅面划分得更多,双透镜光轴中心将继续向边缘移动,最大会移动至SLM的最边缘,此时SLM的有效记录面积达到最大,为原来的4倍.但划分的区域越多,FINCH记录的次数越多,成像速度会大大降低.
采用上述方法增大视场并不会影响整个系统的分辨率,FINCH成像系统的强度点扩散函数(PSF)宽度决定了系统的分辨率,在像平面上PSF的宽度为[13]:

其中λ为入射光波长,zr为再现距离,RH为经过SLM分光后的两个球面波在CCD表面的重合半径.当给SLM更换不同掩模时,并不会改变(4)式中几个参数的值,即PSF的宽度不变.所以,采用上述方式在SLM上加载掩模,可以在保证高分辨率的同时有效扩展FINCH系统的记录视场.
3 实验系统
本实验搭建的是如图4所示的非相干光反射式数字全息记录系统,采用连续的白光光谱光源(CLE-TCX250,250W),会聚透镜L1焦距为60 mm,滤光片(BF)的带宽为20 nm,中心波长为632.8 nm,BS1,BS2为分束器,USAF 1951 分辨率板为待测样品,Polarizer为偏振片,其偏振方向与SLM的液晶长轴方向一致,准直透镜L2的焦距为250 mm,SLM像素数为1920×1080,像素尺寸为8 μm,CCD像素大小为4.54 μm,像素数为2750×2200,拍摄时实际所用像素数为2048×2048.待测物体与L2之间的距离为250 mm,L2与SLM之间的距离为140 mm,SLM到BS2与BS2到CCD的距离之和为250 mm.
实验记录过程中只需通过计算机给SLM依次更换不同光轴中心的相位掩模,记录各视场的相移全息图.
4 实验结果与分析
采用图4所示非相干光反射式数字全息记录系统进行实验探究,分别在SLM上依次加载图3中的掩模,CCD记录下USAF 1951 分辨率板不同视场的全息图,利用角谱衍射法将全息图重建,得到如图5(a)—图5(d)所示的子图像.利用Matlab软件将各子图像拼接处理得到如图5(f)所示的大视场图像,图5(e)为常规FINCH记录得到的再现像,可以看出,图5(f)的视场范围明显大于图5(e),所以采用本研究方法可以增大系统的记录视场.为了能够进一步说明增大成像视场的同时没有影响分辨率,绘制了图5(b)和图5(e)红线处的强度分布曲线图,分别为图5(g)和图5(h),观察图5(g)和图5(h)可知,当加载设计的大视场掩模时所获得的重建像质量较高,噪声没有增加,并且峰值没有下降,红色曲线分布也比较均匀,更加有力地说明了本实验方法可以同时实现高分辨率大视场成像.
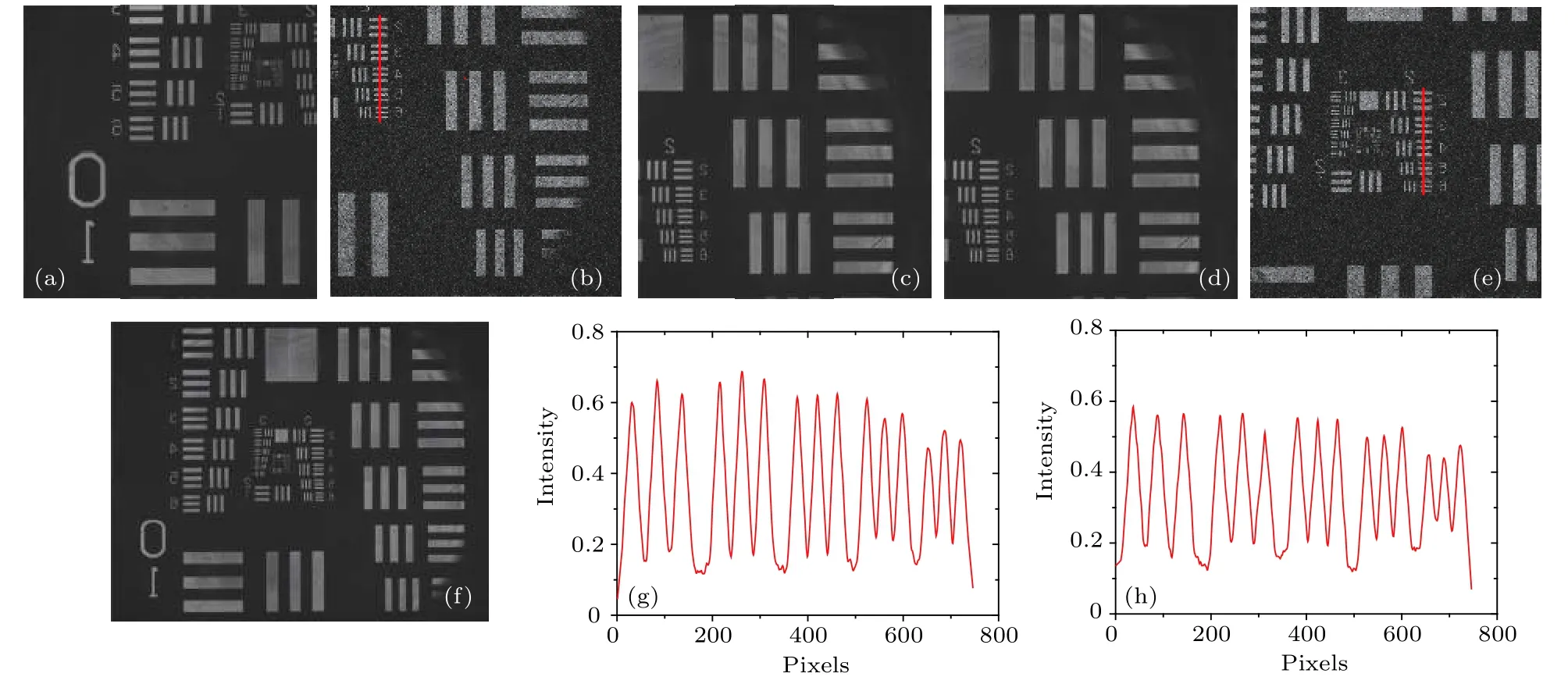
图5 USAF1951分辨率板重建像 (a)-(d)分别为加载图3中掩模所得;(e)常规再现像;(f)大视场图像;(g)为(b)红线处的强度分布曲线图;(h)为(e)红线处的强度分布曲线Fig.5.Reconstruction images of USAF1951 resolution plate:(a)-(d)are mounted with Fig.3 (d)masks,respectively;(e)normal reconstruction images;(f)large field-of-view images;(g)the intensity distribution at the position of the red line of (b);(h)the intensity distribution at the position of the red line of (e).
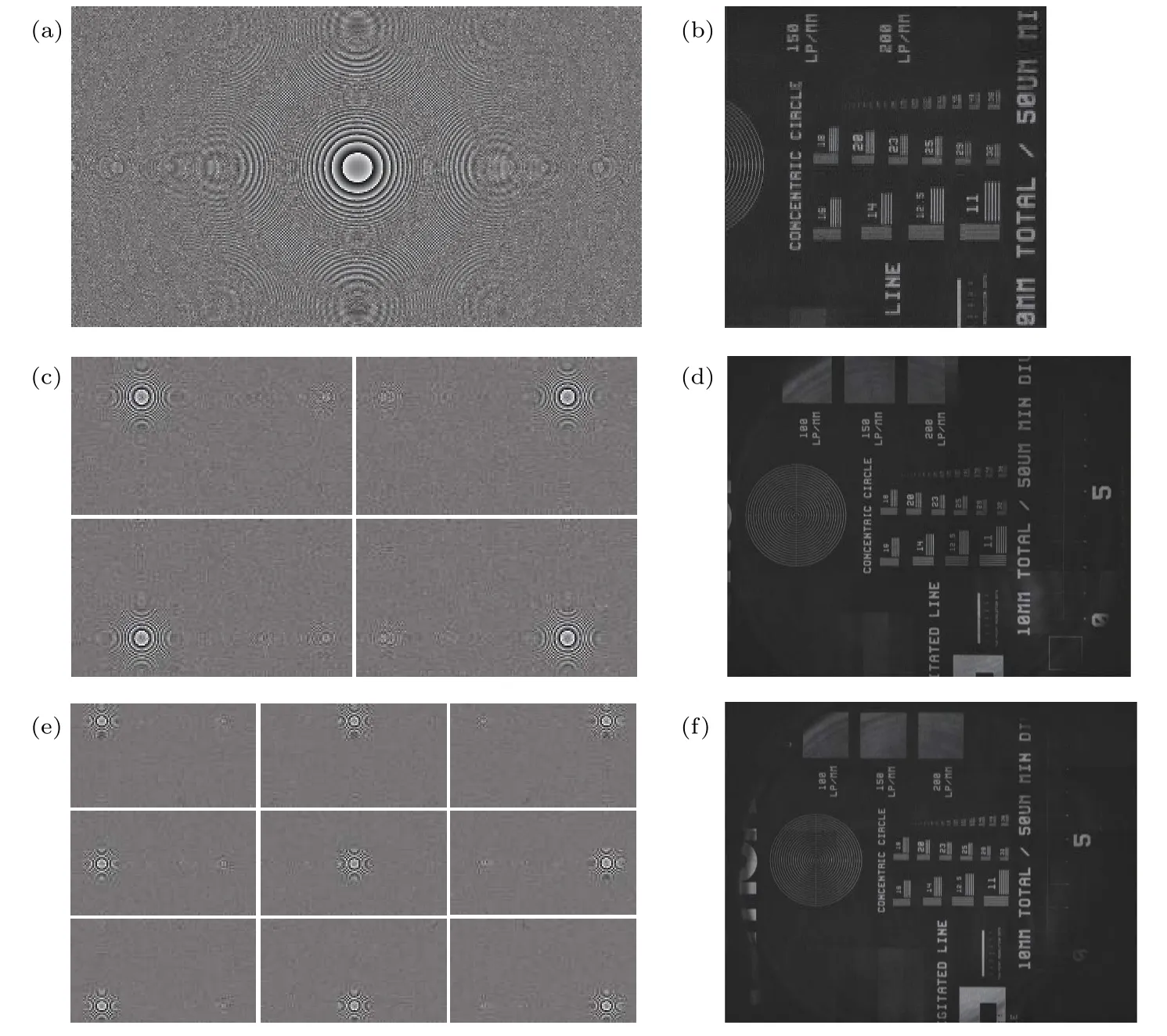
图6 R1L3S5P分辨率板重建像 (a)常规掩模;(b)常规再现像;(c)四次记录掩模;(d)由四个子图像拼接得到的大视场图像;(e)九次记录掩模;(f)由九个子图像拼接得到的大视场图像Fig.6.Reconstruction images of R1L3S5P resolution plate:(a)Conventional mask;(b)conventional reconstruction image;(c)masks of four records;(d)large field-of-view images obtained by splicing four sub-images;(e)masks of nine records;(f)large fieldof-view images obtained from nine sub-images.
另外,我们对本文所提出的菲涅耳非相干数字全息大视场方法进行了更深一步的实验研究,以R1L3S5P分辨率板作为记录物体,结果如图6所示.实验中,首先在SLM上加载如图6(a)所示掩模记录物体的全息图,经过三步相移线性处理后采用角谱法再现,获得的重建像如图6(b)所示;其次在SLM上依次更换如图6(c)中不同光轴中心的掩模,将记录的四幅子图像进行再现、拼接处理后得到如图6(d)所示的大视场图像;最后以相同的方法给SLM依次加载如图6(e)中的各个掩模,最后得到九个不同视场下的重建像,经过拼接处理后得到如图6(f)所示大视场图像.比较图6(b)和图6(d)可以发现前者在视场边缘周围没有记录到的信息在后者中被记录下来,后者的视场信息完全包含了前者,大大扩增了前者四周的视场;观察图6(d)和图6(f)可以看到图6(f)所记录的视场范围相对于图6(d)中的视场有了进一步增大.实验结果表明当将加载在SLM上掩模的光轴中心向边缘移动时可以有效扩大系统的记录视场,充分证实了本研究方法通过增大SLM的有效直径实现了FINCH系统的大视场高分辨成像.当然,随着SLM上光轴记录中心的增多,成像速度会降低,对于四个光轴中心利用三步相移技术只需要拍摄12次,如果是九个光轴中心将要拍摄27次,如果将光轴中心进一步向边缘移动,则记录时间会大大增加.
5 结 论
随着光电成像技术的发展,为了获取更大空间范围及更多空间细节的目标图像信息,光学系统逐步向大视场和高分辨率的方向发展,FINCH技术在全息显微成像方面表现突出,但由于成像视场较小限制了该技术的应用范围,本文对扩大FINCH系统的记录视场进行了理论分析和实验研究.首先设计了不同光轴中心位置的掩模,并使光轴中心逐步向边缘移动从而增大SLM的有效直径,然后将几种掩模分别加载在SLM上进行全息记录,最终获得了不同视场范围的重建像,比较分析实验结果发现,将掩模的光轴中心向边缘移动可以有效增加系统的记录视场.而且本研究方法不需要复杂的成像装置,只是通过计算机更换SLM上加载的掩模便可记录不同视场下的全息图,操作简便快捷,并且兼顾了高分辨率和大视场成像,为FINCH系统的大视场成像提供了实验支撑,拓宽了该技术的应用范围.
