利用激光干涉测量流体的二维温度场分布
2019-06-03王亮星李佼洋蔡志岗王嘉辉
黄 和,王亮星,李佼洋,蔡志岗,王嘉辉
(中山大学 物理学院,广东 广州 510275)
温度场测量技术在工业生产、精密实验中空气温度场分布的检测、重要区域的火灾监控、有毒气体排放的鉴别等方面均有重要作用. 目前常用温度测量方法除了传统的温差电偶[1]、热敏电阻等接触式测量方法以外,光学测温技术[2-3]、声学高温计[4]等非接触式测量方法逐渐成为研究热点. 传统的接触式测量方法具有温度范围窄、只能单点测量、对待测温度场有一定干扰等局限性,若需要进行大范围测量,则面临测量精度不足等问题. 一些新型的非接触式测量方法(如红外热成像[5])则存在成本高、分辨率低等问题. 因此研究精确、全场、简单有效、性价比高的测温技术具有科学研究意义和应用价值.
本文基于迈克耳孙干涉的流体温度场测量方法[6],可获得垂直于光路平面的实时二维温度分布,具有全场、定量、快速、直观、无损探测等特点.
1 设计原理
1.1 激光干涉测量流体温度分布的基本原理
光实质为一种电磁波,其运动状态可用波动方程来描述[7]. 当2列频率相同、振动方向相同的单色光波在空间中相遇时,将发生干涉,光强受到2列光波间的相位差δ的调制[8],相位差δ可表示为
(1)
其中,ΔL为2列光波从光源到达P点的光程差,Δφ0为初相位差,λ为光波波长. 当该点相位差δ=2kπ(k为整数)时,干涉相长,形成亮点;而当相位差δ=(2k+1)π(k为整数)时,干涉相消,形成暗点. 在接收屏上将形成一系列明暗相间的干涉条纹. 改变相位差δ,可使其光强分布发生变化,产生条纹“移动”的现象. 当光波相位差发生非均匀变化时,不同位置的干涉条纹将相应表现出不同的移动量,反映出各点相位差变化的差异.
当光在介质中的传播路程l恒定时,光程差ΔL由折射率变化量Δn决定[9]:
ΔL=NlΔn,
(2)
式中,l为光束单次通过待测区域的路径长度,N为光通过该区域的次数,实验中由于激光往返1次通过待测流体,N取值为2.
定义干涉条纹的移动量为m,m可表示为
(3)
通过计算干涉条纹移动条数,可推算流体折射率改变量. 由于折射率改变量是关于温度的函数[10-11],因此条纹移动量间接反映了流体的温度变化量,基于此原理可测量流体的温度分布.
以空气为例,利用热源对光路中空气加热,测量其温度分布,此方法可适用其他黏度低的流体. 空气折射率随温度、压强的变化关系[10]为
(4)
其中(n-1)s为标准空气(压强为1.01×105Pa,温度为15 ℃)的折射率. 可知,当压强始终处于1个大气压下时,折射率改变量Δn随温度的变化关系为
Δn(T)=|(n-1)Tp-(n-1)0|=
|(n-1)s·0.001 388 23p0·
(5)
其中(n-1)0为常温常压下的空气折射率,p0为1个标准大气压,T0为室温. 将式(5)代入式(3)中,则得到条纹移动量m随温度T的变化关系:
(6)
式中除T为未知量外,其余均为已知量,理论上对干涉条纹照片进行分析,可计算出每点的条纹移动量m,代入式(6)计算对应温度,可绘制流体的二维温度分布图.
1.2 条纹移动量的计算方法
实验中,调节条纹方向与加热方向正交,采用CCD相机拍摄干涉条纹照片,获得空气温度变化前后的干涉条纹图像. 首先使用Matlab软件获得条纹照片的灰度矩阵,然后使用Origin软件分别做出照片边缘与加热区域的条纹灰度值随像素点的变化曲线,由于受热区域小,散热快,通常认为光路边缘的流体处在室温状态,灰度曲线上的每个峰代表条纹光强极大值,反之谷则代表条纹光强极小值,峰与峰(谷与谷)的间距则为条纹间距[12],在接下来的分析过程中应注意:
1)需找准加热区对应于灰度矩阵中的列数. 为确定灰度矩阵的每一列在干涉条纹照片中的对应位置,应做出照片首行或末行灰度值随像素点的变化曲线,并与干涉条纹照片进行比较,读出需计算区域的准确列数.
2)因为环境温度较低,热场散热较快,当拍摄的视场足够宽时,照片边缘的条纹是由处于室温状态的流体形成. 由于气流的干扰,干涉条纹会上下波动,但波动量通常不会超过1个条纹宽度(详情可见实验记录视频,https://v.youku.com/v_show/id_XMzgwNDYzMjE0NA==.html?spm=a2h0k.11417342.soresults.dtitle). 根据实验结果,以电烙铁作为热源,当加热温度高于400 ℃时,条纹边缘可能不再处于室温状态(取决于热源位置),此时条纹整体发生移动,条纹边缘的移动量可能超过1个条纹宽度,本文将气流干扰或整体温升导致的干涉条纹边缘的移动量称为波动量d1,波动量可为正值或负值;将加热区条纹位置相对于边缘条纹位置的移动量,称为偏移量d2.
3)干涉条纹移动量由波动量和偏移量2部分组成. 对比加热前后的2条灰度值-像素曲线,读出2条曲线中同个峰或同个谷的像素点差值,即可获得干涉条纹移动像素点数,将移动像素点数除以条纹间距像素点,便得到移动的条级数
m=d1+d2.
(7)
2 基于激光干涉测温系统的实现
2.1 实验光路
实验光路如图1所示. 激光由光源射出,经扩束和准直装置后变为横截面积较大的光束,再经分光棱镜分为2束光路分别射向2个平面镜,一束经过待测温度场而另一束不经过,光路经平面镜反射,在分光棱镜的作用下汇合,形成干涉条纹图像,再由凸透镜会聚,进入CCD摄像头. CCD相机与计算机相连,便于记录与处理干涉图像.
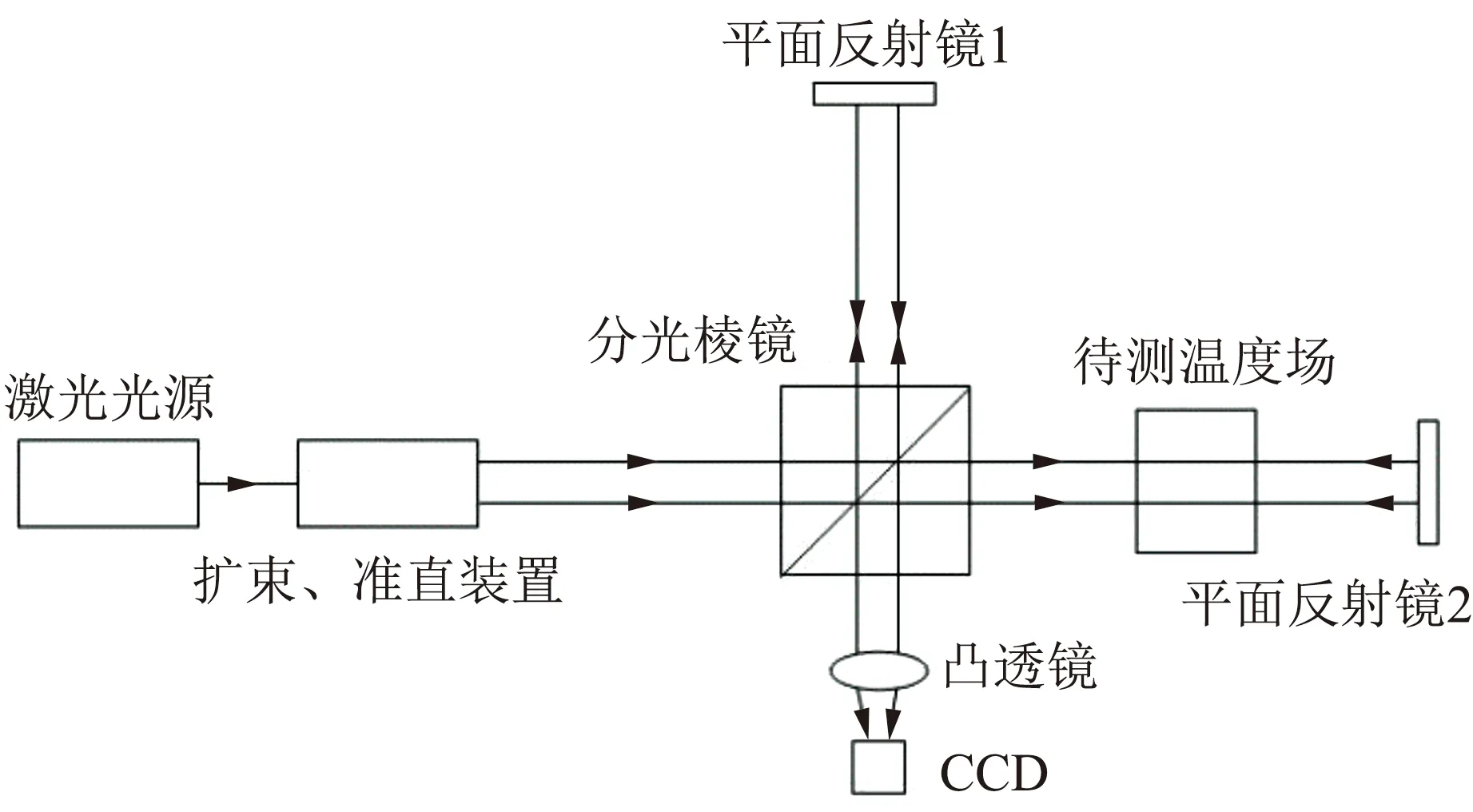
图1 实验光路图
2.2 装置搭建
实验装置如图2所示,元件如表1所示.

(a) 装置图
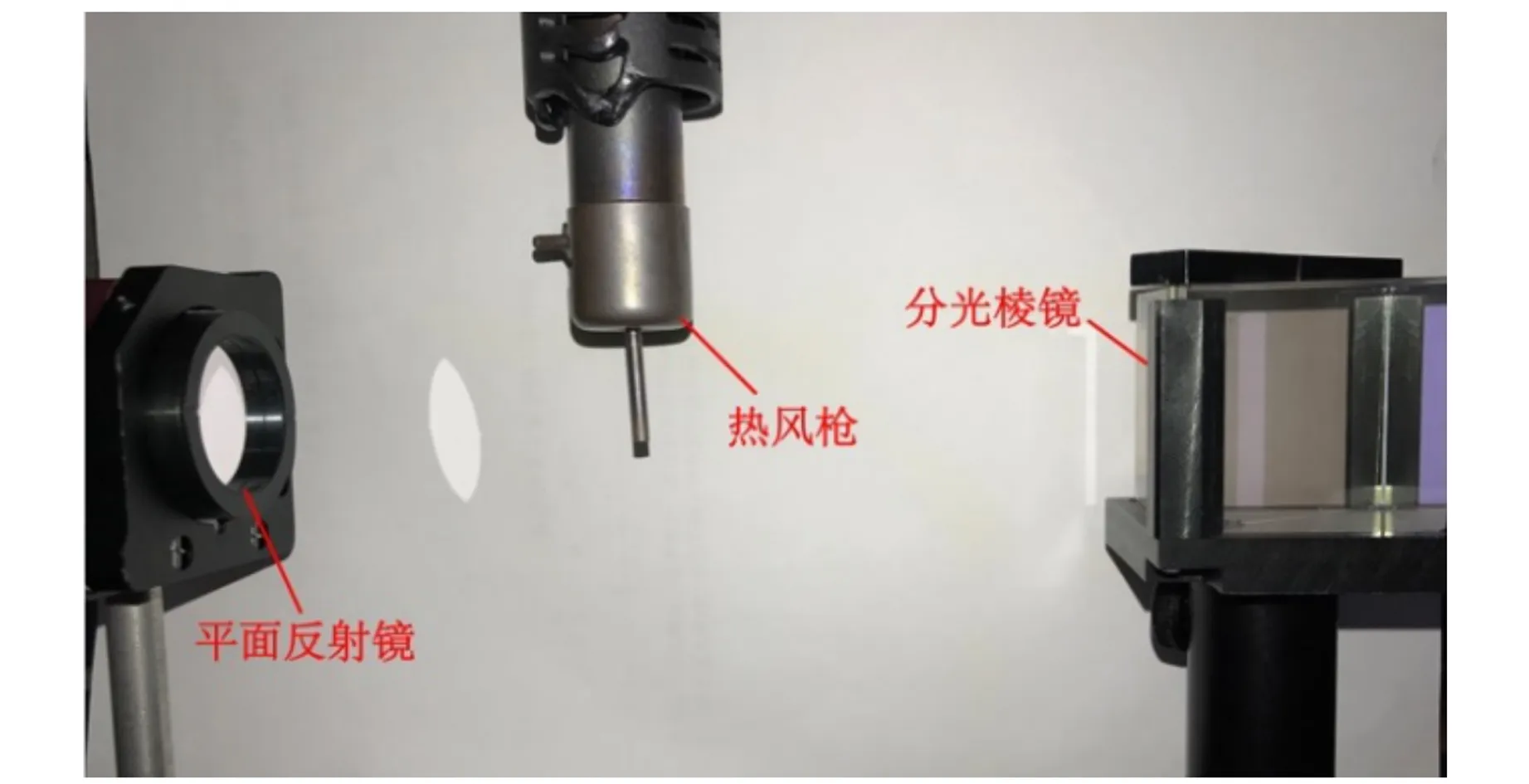
(b)待测温度场区域(用热风枪进行加热)图2 装置实物图
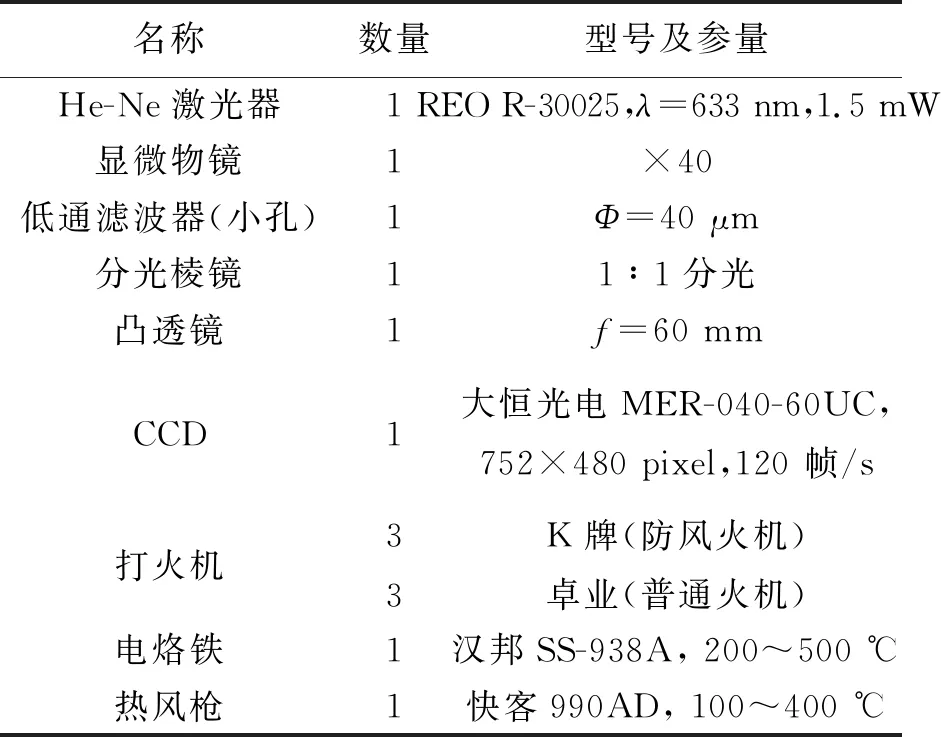
名称数量型号及参量He-Ne激光器1REO R-30025,λ=633 nm,1.5 mW显微物镜1×40低通滤波器(小孔)1Φ=40 μm分光棱镜11∶1分光凸透镜1f=60 mmCCD1大恒光电MER-040-60UC,752×480 pixel,120 帧/s打火机33K牌(防风火机)卓业(普通火机)电烙铁1汉邦SS-938A, 200~500 ℃热风枪1快客990AD, 100~400 ℃
3 系统定标及测量结果
3.1 不同热源加热时的干涉图像
图3为室温下的干涉条纹图像,实验中分别使用热风枪和打火机火焰作为热源对空气进行加热,将形成2个不同的热场,其干涉条纹如图4和图5所示. 从图3~5中可以看出,在热源中心,干涉条纹发生移动;而在视场边缘,离热源较远处,条纹基本不移动,条纹移动量随热源类型、所处位置不同而改变. 条纹的移动直观反映了待测流体温度的非均匀变化情况,为精确表示平面内各点的温度,需进一步对系统进行定标,获得干涉条纹移动量与流体温度的对应关系.

图3 室温下干涉条纹图像

图4 热风枪热场的干涉图像
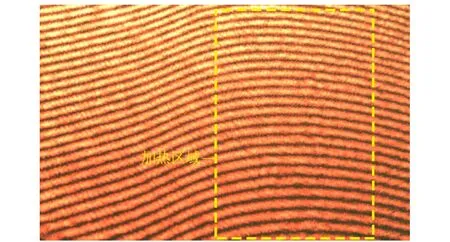
图5 火焰热场的干涉图像
3.2 系统定标
使用可精确控温、温度范围为200~500 ℃的电烙铁对待测区域空气定点加热,从200 ℃起,每隔50 ℃对空气加热较长时间,使用CCD相机拍摄空气在不同温度下的干涉图像如图6所示.

(a) 200 ℃
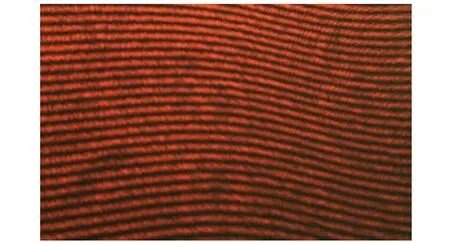
(b) 300 ℃
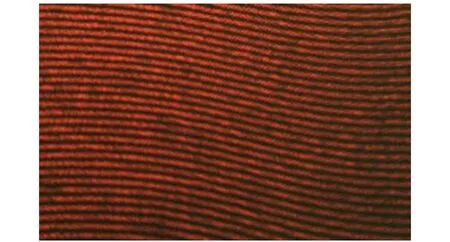
(c) 400 ℃图6 不同温度下的干涉条纹图(以电烙铁作为热源)
依照原理部分提出的方法计算条纹移动量m,对测量系统进行定标,做出条纹移动量与流体温度的关系曲线,并结合理论模型对实验结果进行拟合,如图7所示.
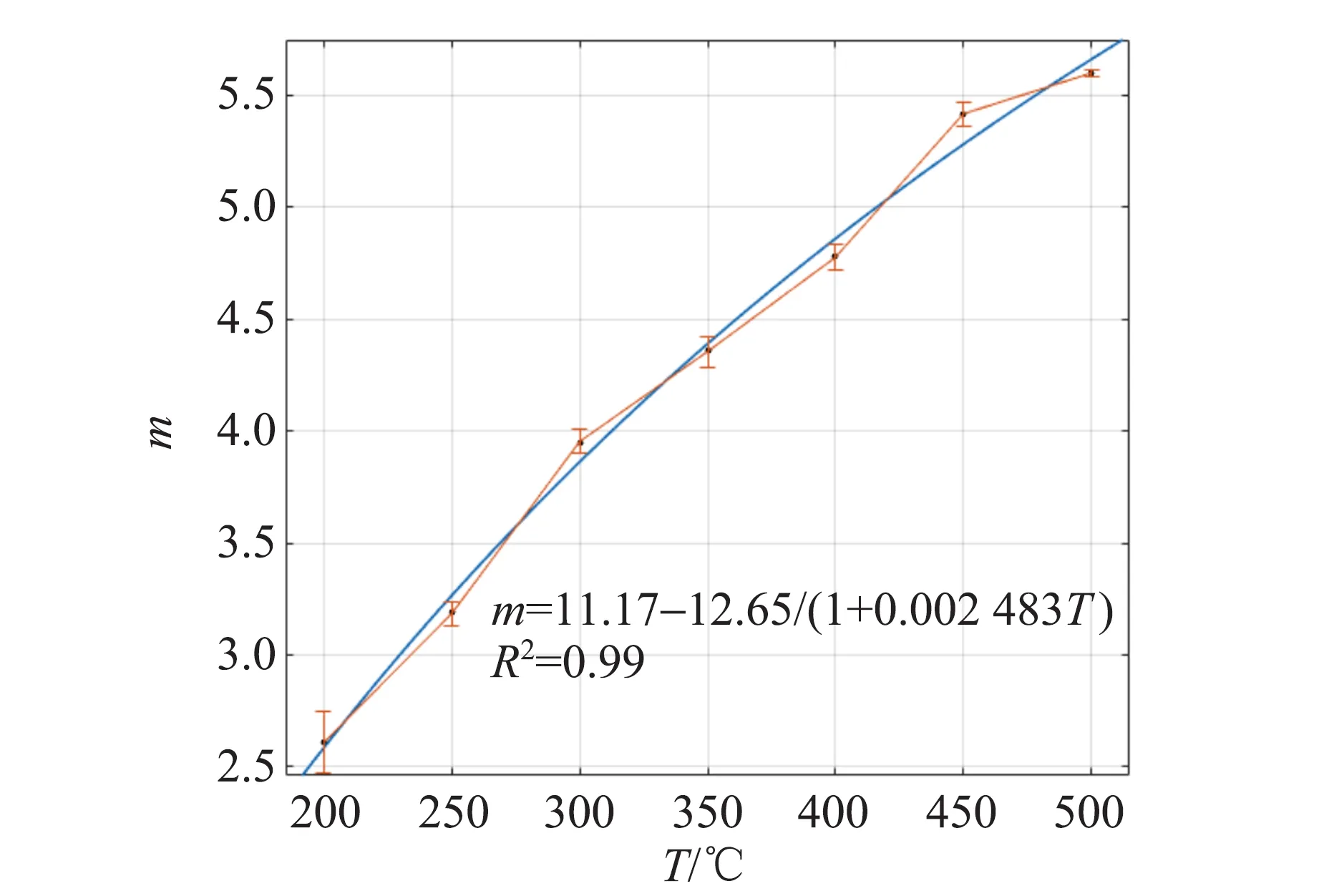
图7 干涉条纹移动量m与流体温度T的拟合曲线
定标结果显示,干涉条纹的移动量m与流体温度T(T>0)满足如下关系:
(8)
在温度范围更大的尺度上,条纹移动量m随空气温度T变化趋势如图8所示.

图8 干涉条纹移动量与空气温度的变化关系曲线
在保持压强恒定的情况下,空气折射率随温度升高而下降,当温度无限上升时,折射率趋于真空折射率,条纹移动的趋势减缓,移动量将达到上限,条纹移动上限是由激光波长、热场宽度、大气压强、初始折射率等所决定的常量. 由图8可预测,当流体温度高于800 ℃时,条纹移动量随温度变化的敏感度将显著降低,在测量温度大于该值的流体时,应采用更高像素的CCD相机,提高图像分辨率,以确保测量结果的准确度.
3.3 不同热场的二维温度分布测量
图9~12的纵坐标M为视场范围内自下而上的条纹序数,横坐标N为以热源为中心向左、右选取的共20个像素点,每点间隔19个像素点.
3.3.1 热风枪热场的二维温度分布图
使用热风枪,设定温度为180 ℃,对空气加热,对干涉图像进行处理获得最靠近热源的条纹移动量约为2.40条,将条纹移动量代入式(8)计算得到理论上热源附近空气的温度约为178.42 ℃,该结果与实际设定值符合较好,结果偏小的原因可能是热风枪出风温度偏差和CCD像素数的精度问题.
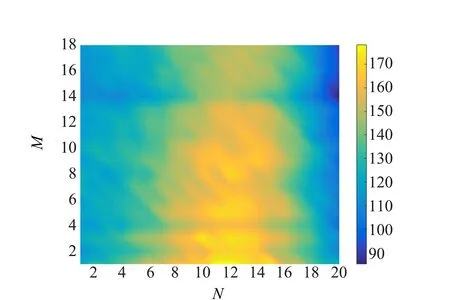
图9 热风枪(180 ℃)热场的二维温度分布图
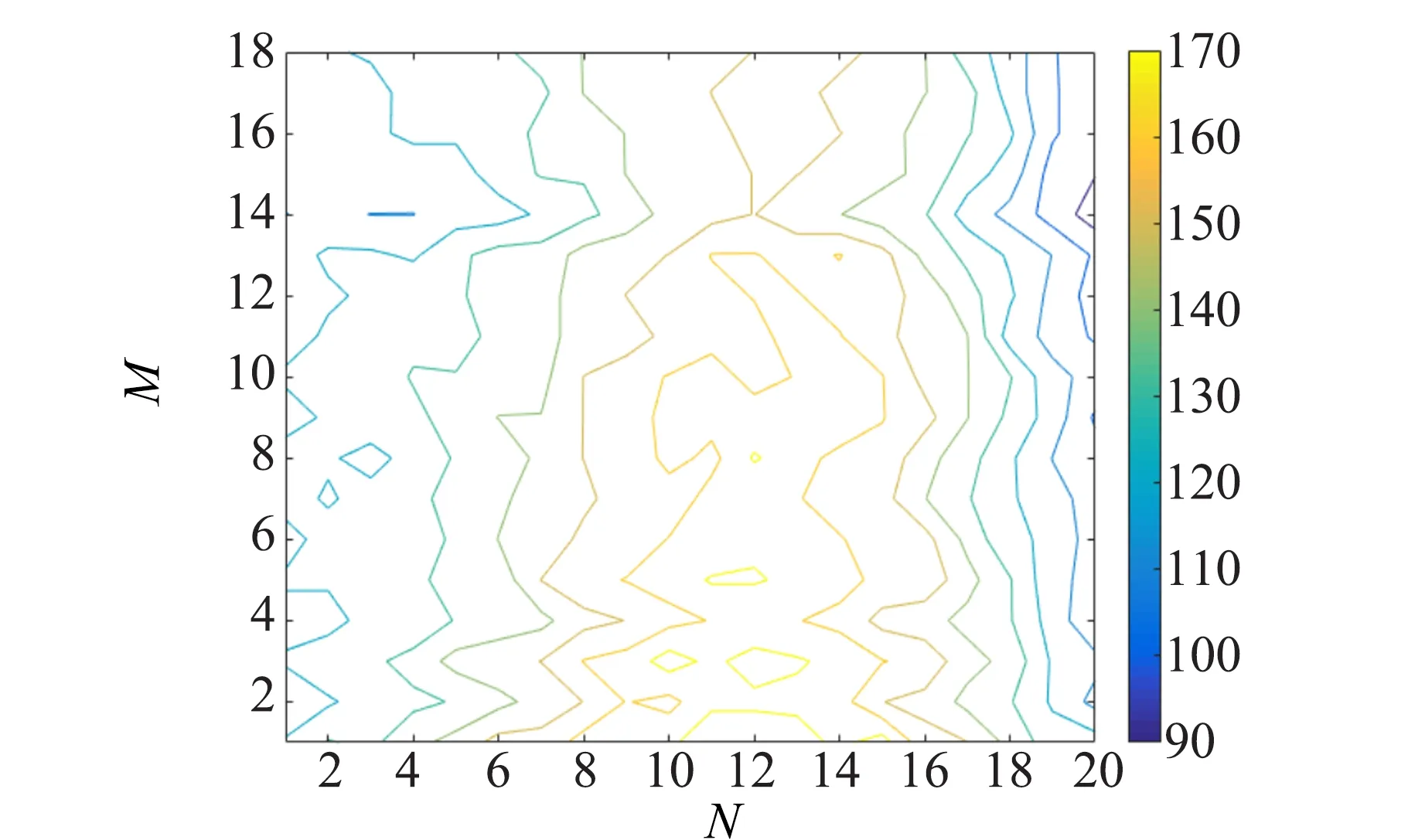
图10 热风枪(180 ℃)热场的等温线图
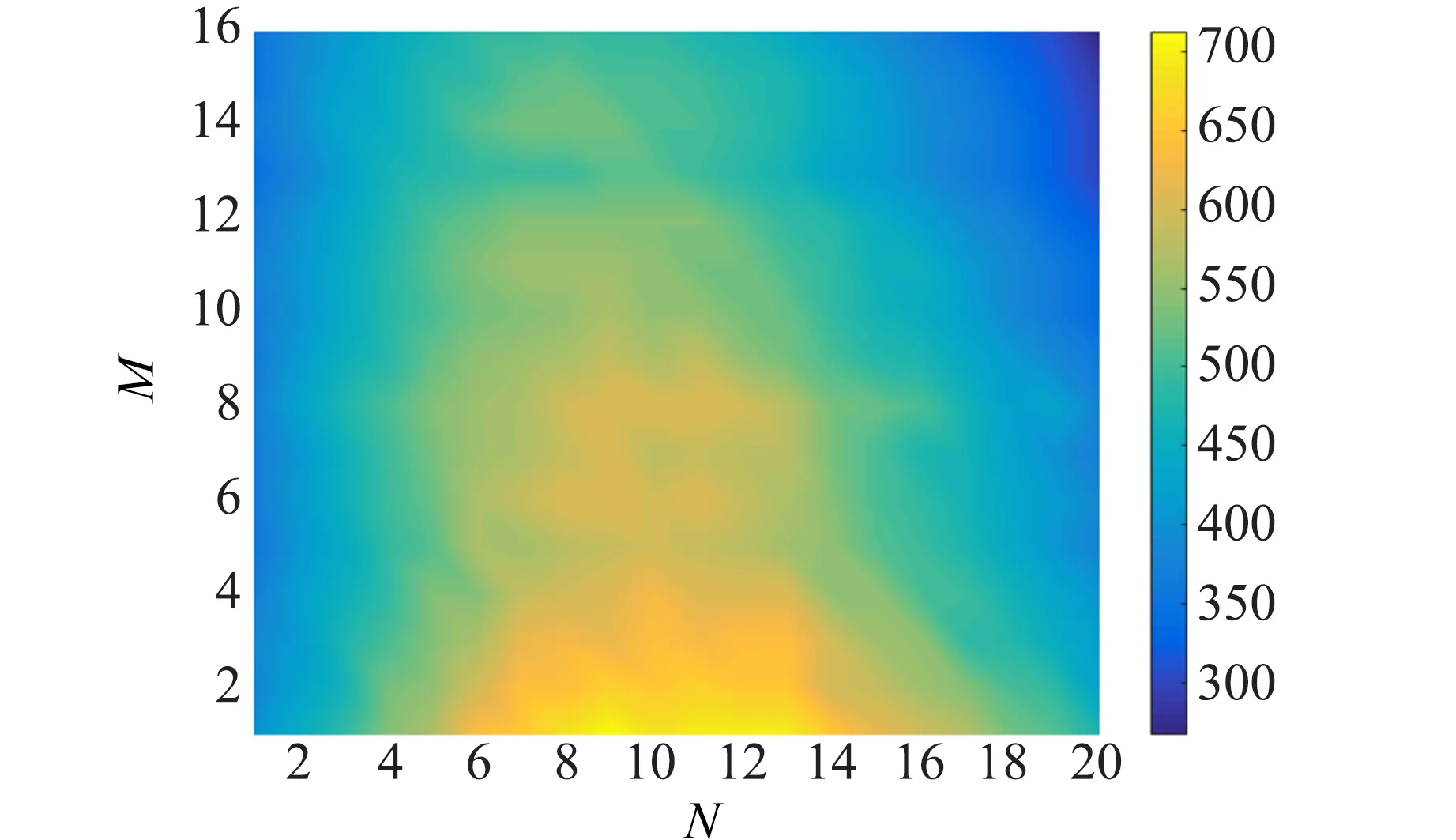
图11 火焰热场的二维温度分布图
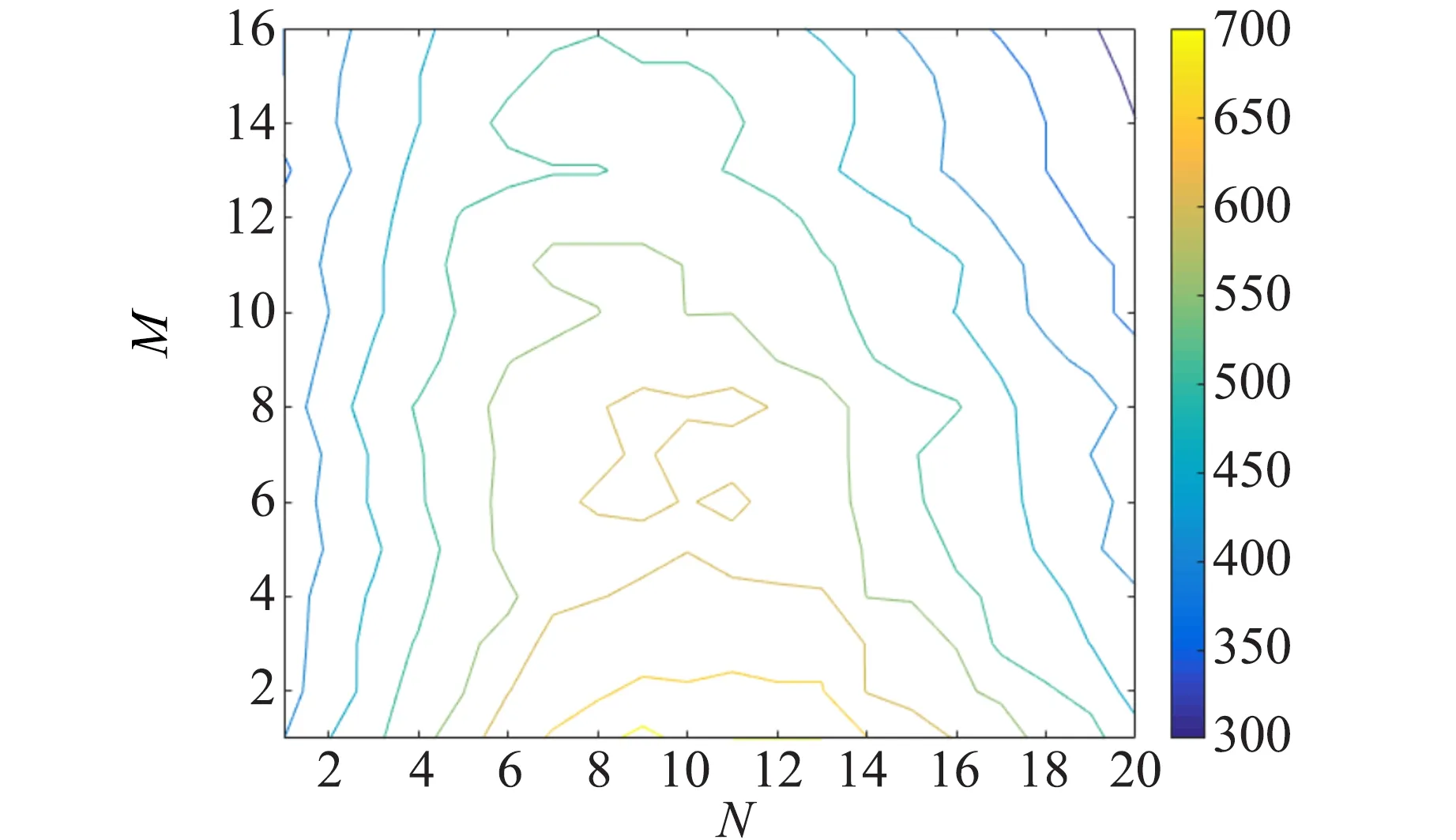
图12 火焰热场的等温线图
热风枪持续喷出高温气体,气流的影响作用大,从图10中可以看出,用热风枪进行加热,在加热方向上距离热源较远的空气仍然保持较高温度,流体等温线为两侧较长的“∩”形,在垂直热源的方向上,空气温度几乎保持在160 ℃以上,在水平方向上,温度缓慢降低. 除此之外,热风枪热场的温度梯度较小,在该视场范围内,边缘与中心的空气温差低于100 ℃. 这可能是因为热风枪喷出的高温气体可以看作是细长的圆柱形热源,而非点热源,它对空气的加热面较大所致.
3.3.2 火焰热场的二维温度分布图
以火焰作为热源,测量受热空气的温度分布,结果显示,防风式打火机火焰的外焰温度约为712.71 ℃. 与热风枪不同,火焰对空气的加热作用主要来自外焰的最高点,即为点热源,由图12可知,空气温度在水平和垂直方向上均下降较快,热场等温线呈倒置的“U”形,且两侧较短,视场范围内,边缘与中心的空气温差大于300 ℃.
4 结 论
利用激光干涉的二维温度场测量方法,基于迈克耳孙激光干涉仪的基本结构,搭建实验装置,用不同热源进行加热,对空气温度场进行了测量. 由于流体(如空气)折射率会随温度、压强而变化. 温度变化将引起使空气折射率发生改变,从而改变激光光束的光程差,使干涉条纹产生不同程度的移动,因此根据条纹不同的移动量可获得垂直于光路平面内空气的温度分布图. 为表示平面内各点的温度,使用可控温的电烙铁作为热源,对系统进行定标,获得条纹移动量与空气温度的对应关系. 实验对不同热源的热场进行测量,并绘制了其二维温度分布图和等温线图,以热风枪作为热源,测量热源附近的空气温度约为178.42 ℃,与实际温度(180 ℃)仅差1.58 ℃;以打火机火焰为热源,测得热场最高温度约为712.71 ℃.