基于决策树的无人机高光谱遥感影像地物分类研究
2019-06-01万欢孙昕周浩澜王长委
万欢,孙昕,周浩澜,王长委*
(1.华南农业大学资源环境学院,广东 广州 510642;2.珠海欧比特宇航科技股份有限公司,广东 珠海 519080;3.华南农业大学水利与土木工程学院,广东 广州 510642)
分类是高光谱遥感影像处理和应用的一项重要内容,其最终目标是给影像中的每个像元赋以唯一的类别标识[1]。然而,高光谱遥感影像的高维特性、波段间高度相关性、光谱混合等使得高光谱遥感影像分类面临着巨大挑战[2]。随着模式识别、机器学习、遥感技术等相关学科领域的发展,高光谱遥感影像分类研究取得了快速进展[3~5]。通过分析不同地物的光谱曲线,找出不同类地物之间的光谱曲线差异,明确最能区分某一类地物与其他地物间的波段,运用波段的代数运算方法,对高光谱遥感影像进行分类,并将分类结果与机器分类结果进行比较,评估了分类精度。
1 材料与方法
1.1 数据获取
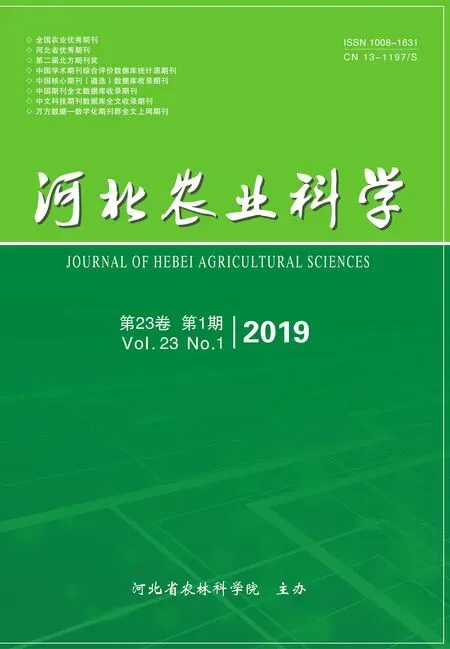
2017年6月8 日,UTC 时间6∶30~7∶30,采用Headwall 纳米级高光谱成像光谱仪,获取广东省广州市增城区温涌路旁某一段河流的数据。以河流为中心线,包含河流两岸的部分地物,测区宽约93 m、长约630 m。飞行路线大致为东南至西北,影像中有阴影,且阴影的位置均位于地物的东偏南方向。增城区当天无持续风向。影像区域的地物种类不多,地物均较为典型,且成像清晰(图1)。
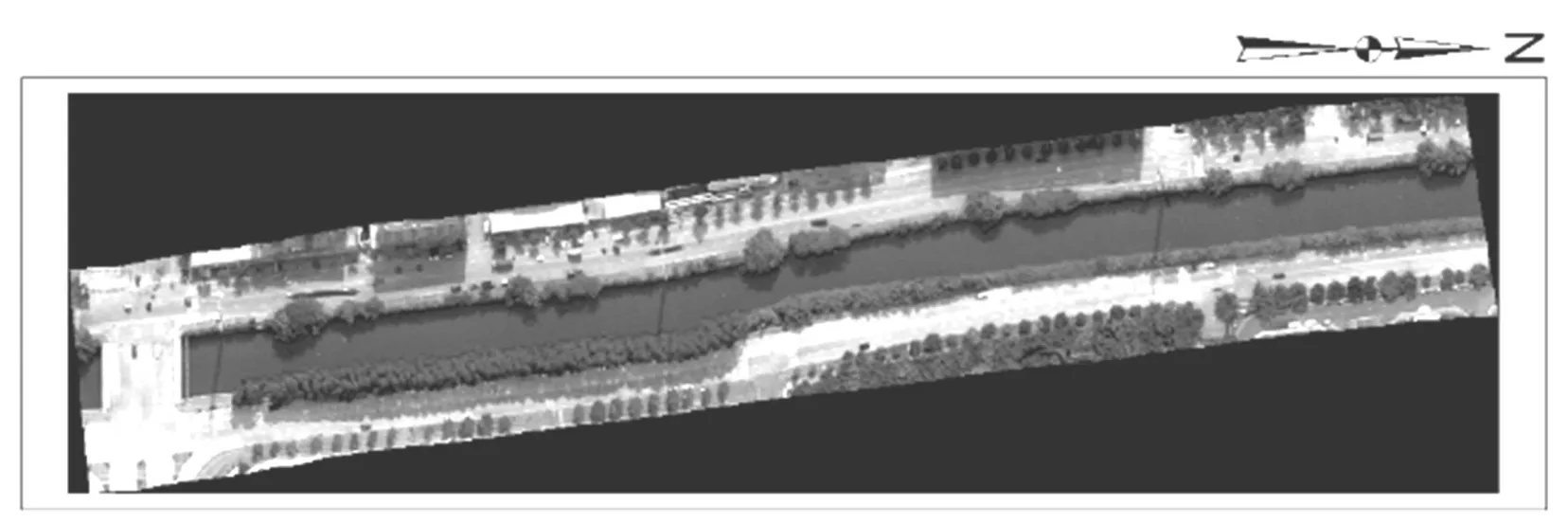
图1 2017年6月8日广州市增城区东江支流某段河流的影像图Fig.1 Image of Dongjiang tributary in Zengcheng District of Guangzhou on June 8th 2017
1.2 研究方法
1.2.1 标准化处理 对不同类别地物各提取一定数量样本点的全部波段的光谱信息,采集不同地物的特征值样本。统计出各波段特征值范围和平均值范围、标准差范围等(表1),用来衡量样本反射率的整体大小。

表1 样本点各个统计指标的区间范围Table 1 Range of statistical data of sample points
1.2.2 分类方法 基于地物光谱特征差异,采用波段运算、阈值分割的决策树方法,对地物进行逐步分类。具体操作步骤为:运用阈值分割法针对同一波段不同地物反射率的差异对地物进行逐级分割;波段运算使决策树得到简化。
1.2.2.1 各地物光谱反射率。制作地物在各个波段的光谱曲线(图2)。对二维光谱曲线图进行分析发现,植被和水体与其他类地物的光谱曲线差异较大,且植被与水体的光谱曲线差异也较为明显。
1.2.2.2 分类处理。通过二维光谱曲线可以直观地对各类地物的光谱曲线进行比较,利用不同类地物的光谱曲线差异,对影像中的地物进行分类是比较简易又快速的方法。使用决策树分类法进行波段代数运算,对地物进行分类。
(1)背景和影像分离(植被分离)。利用第164波段和第126 波段分离背景和影像。然后,利用归一化植被指数NDVI 将植被分离出来。植被反射率变化的陡坡位于第126~164 波段,因此利用公式(1),判断条件分离出植被,NDVI 的值可以通过分类效果进行调整。

(2)水体分离。水体的光谱曲线整体比较低,且变化较为平缓,在第226 波段(中心波长900.12 nm)的近红外波段,水体的辐射值非常低,样本反射率平均值<0.005。而在此波段附近,其他地物的辐射值处于比较高的位置。因此,由第226 波段是否<0.02 作为水体的分离条件,效果最好。
(3)建筑物分离。通过观察光谱特征曲线,将判断条件设置为公式(2)。在第25 波段,建筑物的光谱曲线处在波峰位置;而在到第77 波段的这段范围内,建筑物的反射率下降得最为快速。因此,利用2 个波段的反射率差,将建筑物分离出来。同理,利用公式(3)对错分的区域再次分离,进一步完善分类效果。

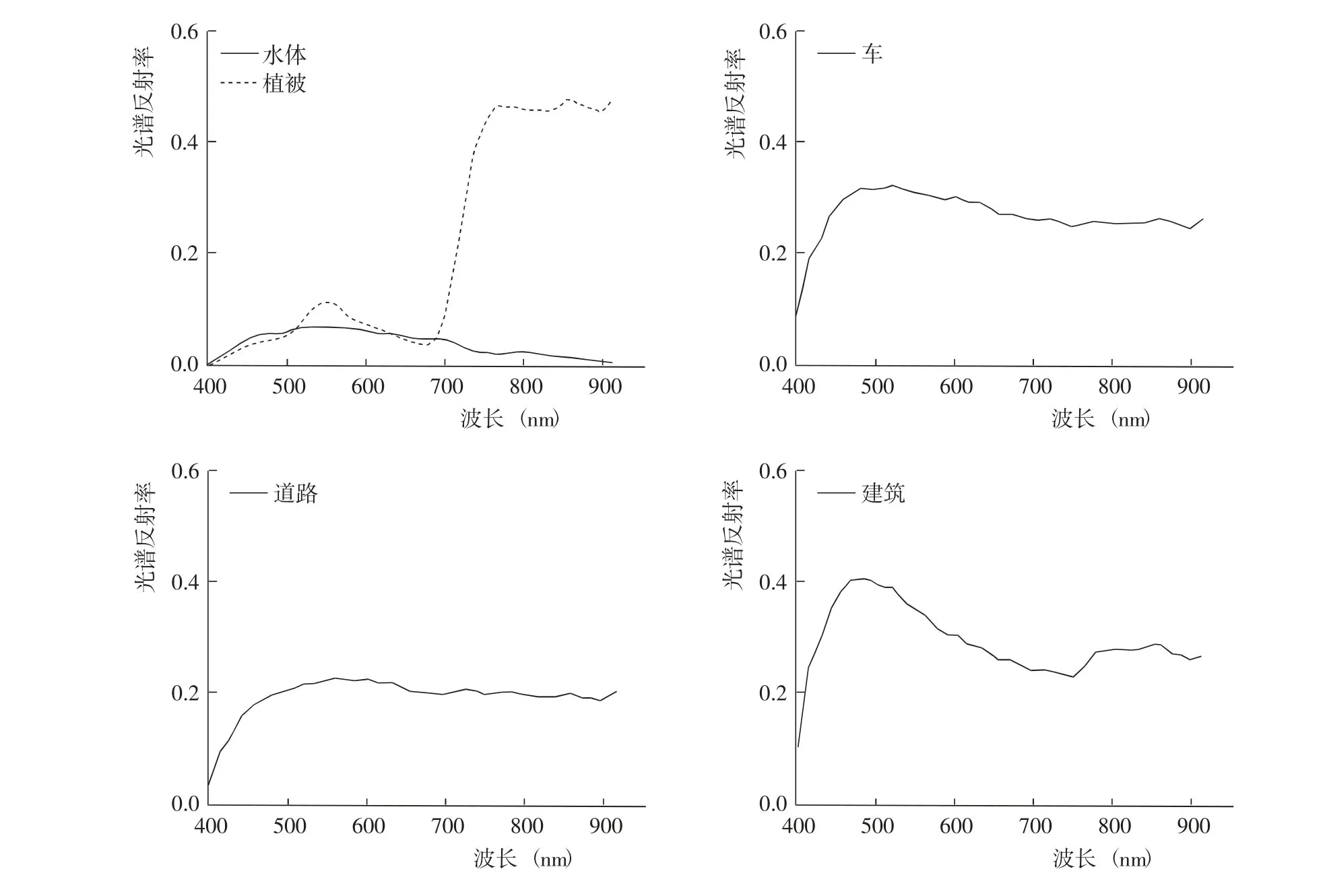
图2 各类地物的光谱反射率Fig.2 Spectral reflectance of various ground objects
(4)道路区与水体间分离。由于受建筑和植被的双重阴影影响,道路区和水体的反射率都非常低,导致二者的光谱曲线处于部分波段区域平行的状态,难以区分。由于水体的整体反射率非常低,因此与暗区道路相比,在同一波段区域,变化速度就显得较低;而在第137~162 波段水体有一个相对的反射率下降速度较快的斜坡,是暗区道路没有的特征,将其与第69~137 波段这一整体都处于反射率下降的区域做比值,分离出水体;在第137~162 波段水体的反射率曲线是呈上升趋势的,利用公式(4)将部分被分类成水体的暗区道路分离出来,归类为道路。

2 结果与分析
采用Headwall 纳米级高光谱成像光谱仪,获取了广东省广州市增城区温涌路旁的河流数据;然后,对数据进行标准化处理,运用波段运算、阈值分割的决策树方法,对地物进行逐步分类,得到地物分类图。
2.1 人工阈值分割
采用人工阈值分割产生的决策树分类结果显示,地物整体被分为四类,绿色为植被,蓝色为水体,黄色代表道路,紫红色代表蓝顶房屋(图3)。由于一些道路渔区被建筑物和植被的双重阴影覆盖,导致其反射率非常低且接近于水体的反射率,分类时被确认为水体。由于原始影像中可以清晰的看到河流中有植被和杂质,最终植被和水体的类别分离效果最好。试验结果通过样本分类精度评定,Kappa 系数=0.86,整体分类精度为89.3%(表2)。说明分类效果较为良好,分类的准确率较高。
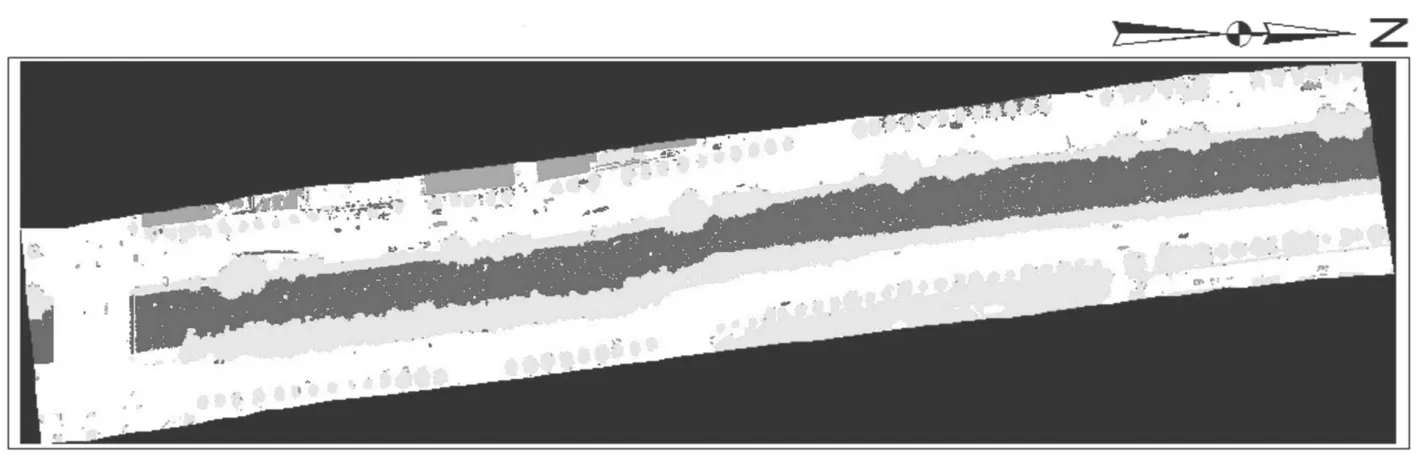
图3 人工阈值分类结果Fig.3 Classification of artificial threshold
2.2 自动阈值分类
通过ENVI 下的机器分类得到的自动阈值,对采集数据进行分割,同样将地物分为4 类(图4)。可以看出,车体和植被分得较为清晰,但是影像中被分类的部分地物的区域呈散点状的较多,且类似于斑马线这种反射率较高的道路区域易被分类为建筑类别,被分类为建筑类别的车辆在机器分类的影像下,显得较为散乱。机器分类精度评定Kappa 系数=0.80,总体的分类精度83.51%(表3),均低于人工阈值分割。

表2 人工分类混淆矩阵Table 2 Obfuscation matrix of artificial classification

图4 机器自动阈值分类结果Fig.4 Classification of mechanized automatic threshold
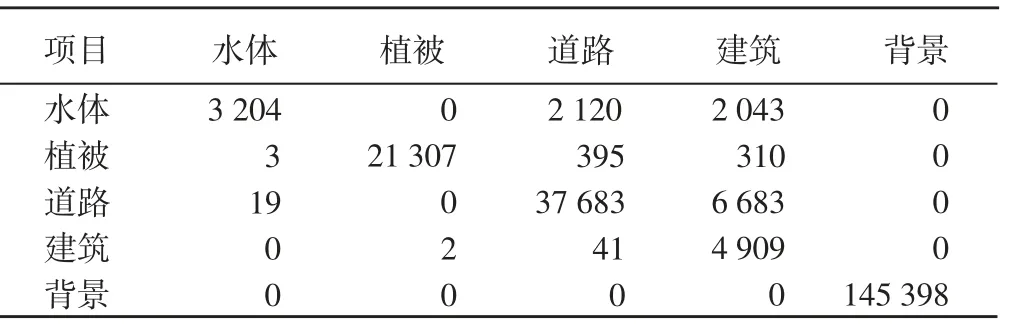
表3 机器分类混淆矩阵Table 3 Obfuscation matrix of machine classification
3 结论与讨论
3.1 主要结论
采用波段特征值对广东省增城市东江支流某段河流的无人机高光谱影像进行了地物分类,得到了以下结论:(1)由地物的光谱曲线可以看出,植被和水体在无人机高光谱影像上的光谱曲线差异比较明显,植被和水体光谱曲线的差异为进一步采用特征值分类提供了借鉴;(2)对阈值分割产生的决策树分类结果进行样本分类精度评定,人工创建的决策树的分类的精度明显要高于机器自动创建的决策树分类的精度。
3.2 讨论
3.2.1 人工与机器分类效果的比较 机器自动做出的决策树较为复杂,分类树的级别达到近10 级,且较少通过对波段做代数运算进行分类。人工阈值分割,地物被分类的区域较多的集中在一起,散点较少,即使被分错,也是以小块区域为单位;而自动阈值分割出来的影像,散点较多,类域不够集中。
3.2.2 高光谱遥感影像分类遇到的问题 在石灰岩过程中,(1)两两区分地物的条件设置不同,有可能将其他地物纳入到两类地物中,因此需要不断调整设置条件,以达到最好的分类效果。(2)地物反射率测量结果受多种因素影响,如太阳电磁波入射角、波长、温度、物体表面粗糙度等[6]。而试验中,主要影响地物反射率变化的因素为温度和阴影,其中阴影对地物的反射率光谱的影响属于间接影响。 (3)决策树软件的运行对计算机有较高的要求,且分类结果杂点较多,分类相对散乱。对于特定的某一幅影像,根据其特点不断调整分类条件,以求达到最佳分类。