调频连续波测距非线性校正技术研究综述∗
2019-06-01张铁犁
靳 硕 张铁犁
(北京航天计量测试技术研究所 北京 100076)
1 引言
近年来,随着我国工业的不断发展,对大尺寸测量的要求越来越高,特别是在航空航天、汽车和船舶制造业等方面,如大型和重型运载火箭中大型零部件外形的测量、水汽轮机主轴长度的测量、大型精密机床床身的测量及水电站发电机组转子定子直径的测量等,工件尺寸大小从几米到几十米甚至上百米,测量精度要求从毫米级到微米量级,具备的测量环境迥异且条件较差。对实时,大范围,高精度、高效率的现场测量需求越来越突出[1]。
调频连续波测距技术通过连续线性或正弦调制单纵模激光器的激光频率,并利用被测距离产生的时延获得差拍信号,从差拍频率解算绝对距离。相比于双频激光干涉测量等相对距离测量技术以及立体视觉、三坐标机、激光跟踪仪等技术,具备非接触测量、脱离导轨、不依赖合作目标和无需太多人工干预等优势,测量精度高、测量范围大、自动化程度高、可实现绝对距离测量,在国防和民用领域均有广阔的应用前景。
2 调频连续波测距原理
调频激光测距仪基于飞行时间原理,通过测量激光往返与探测器和目标间的时间实现对目标的距离探测。为了准确测量激光飞行时间,调频激光测距仪通过利用一个频率随时间变化的调制信号对激光器进行调制,对发射的激光进行与时间有关的特征标记,测量光与参考光进行拍频,拍频后的信号频率较低一般为kHz到MHz量级,可以利用光电探测器进行直接探测。
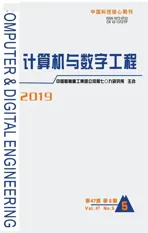
三角波调制的调频激光测距原理图如图1所示。
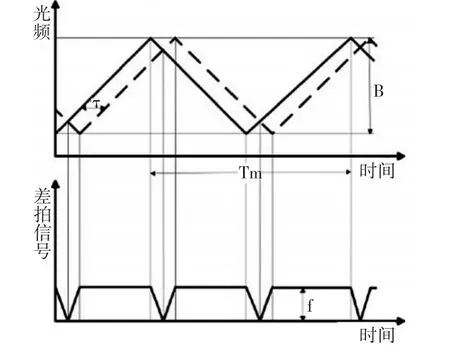
图1 三角波调制的调频激光测距原理图
设调频信号的初始频率为f0,激光器的调制范围为B,激光器的调制周期为T。
激光器发出的信号瞬时频率为

目标回波信号的瞬时频率为

则ft(t)与fr(t)的拍频信号的瞬时频率为

将α=2B/T,τ=2R/c带入式(3)得

因此,调频连续波激光测距系统只要通过一定的方式测得测量信号和参考信号的差拍频率,就可以通过计算得到测量的目标距离。
以上公式推导是在假设激光器的调制为理想线性的前提下进行的,然而实际情况下,由于激光本身频率响应的波动和调制电路噪声等原因,完全的非线性是不可能达到的,因此实验得到的拍频信号是随着不同的噪声频率而不可预见的变化着的,如图2所示的拍频信号的波形图。
这种非线性导致的拍频信号频率不规则变化导致了光电探测器探测到的拍频信号并非单频信号。对该信号进行FFT运算以后得到一个被展宽的频谱谱线,无法得到高精度的测量结果。如图3所示,发射信号和回波信号的频率都随时间有一定的波动,此时拍频信号的频率不再是单一的,而是具有一定的频谱展宽。
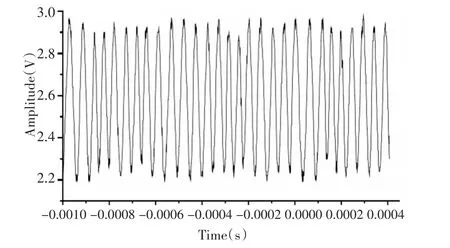
图2 非线性导致的拍频信号波形图

图3 调频信号的非线性和其导致的拍频频谱展宽
同时,由于拍频信号频谱展宽,当测量两个相对距离较小的目标时,如图4所示,目标A与目标B的拍信号中心频率fbA与fbB非常接近,频谱均被展宽Δfb,根据瑞利判据可知,两目标频谱将不能被分辨,导致测量系统分辨率下降。
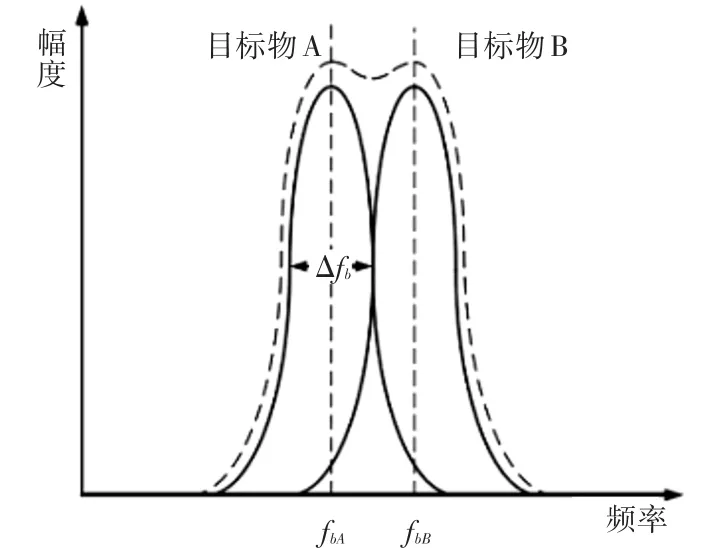
图4 频谱展宽导致的分辨率降低
因此调频信号的非线性对测距结果的影响是非常严重的,要想得到更高的测距精度和测距分辨率,必须对调频信号的非线性进行校正。
3 调频连续波测距非线性校正国内外研究现状
3.1 国外技术研究现状
调频连续波激光测距系统自20世纪90年代以来得到飞速发展,国外许多大学和研究机构都开展了与调频连续波测距非线性校正相关的研究,市场上已经有成熟的产品出现。
1994 年,德国的 A.Dieckmann[2]首次采用分布反馈可调谐双波导激光二极管研制成功了FMCW激光雷达,其可用于对短距离目标的精确测量。为降低调频非线性的影响,实验中采用马赫-泽德干涉技术对激光器调谐的非线性进行了校正。对1cm和10cm距离的目标进行测量时的精度可分别到达8μm和20μm,这证明了调频连续波激光雷达技术可进行短距离的高精度测量。
1996年,Iiyama[3]等最早提出将基于光电负反馈的技术用于线性调频,并搭建了含有参考干涉仪和相位比较器等结构的光电负反馈环路,在100GHz调频范围内实现了较慢速的50Hz的三角波调频的线性化。
1999年,Christer J.Karlsson[4]等针对 FMCW 激光雷达中存在的激光器调谐非线性进行了研究,详细地讨论了非线性校正方法。对于漫反射目标,该激光雷达系统最远能够对175m的距离进行测量。由于调频的非线性以及测量距离的增大,得到的信号信噪比下降,因此信号的频谱被不同程度地展宽,导致测距和测速精度下降。当信噪比为34dB时精度为2mm,当信噪比为16.5dB时约为5cm。
2001年,德国Siemens AG联合技术中心于的Richard Schneider[5]等利用两个调谐曲线成反对称的连续波激光器,采用校准干涉信号对激光器的调频非线性误差进行了补偿,并通过上行调频与下行调频结合的方式消除了测量过程中的环境振动误差,在调制带宽为15GHz时获得了0.5mm的距离测量精度。
2009年,蒙大拿州立大学的 PeterA.Roos[6]等通过自外差技术将激光器形成的反馈回路的拍频锁定到一个参考频率上,完成非线性校正,所使用外腔调频激光器可通过注入电流和压电陶瓷(PZT)分别进行快速和慢速反馈调节,在调频带宽为5THz情况下频率误差为170KHz,以10μm步长连续移动100μm的测距标准偏差为86nm。
2010 年,ZebW.Barber[7]等提出主动啁啾线性化方法对线性调频连续波雷达的激光器进行线性化反馈补偿,系统采用声光调制器、数字相位探测器和伺服反馈系统将拍频锁定到一个固定频率的标准源上,从而完成非线性校正,在调频带宽为几THz情况下,调频线性误差小于1ppm。
2013年,美国国家标准技术研究院的Esther Bauman[8]等,搭建了一套FMCW激光绝对测距系统,利用光学频率梳对可调谐激光器进行校准,实现了对一个拉丝铝目标的绝对测距,测距范围达到了1.9m,测量分辨率为130μm,测量精度达到了100nm。2014年,在FMCW激光绝对测距系统中加入快速转向镜实现了对物体表面的三维成像,测量范围达到了10.5m,测量不确定度10μm[9]。
3.2 国内技术研究现状
国内对连续激光调频测距的起步较晚,近年来此方向也进行了大量的实验研究,但总体而言与国外仍有较大差距,且大多停留在实验阶段,没有商业化的产品出现。
2001年,电子科技大学陈祝明[10]等采用延迟-混频法对射频信号进行自外差,对含有非线性的拍信号进行解相位模糊,并利用数字正交鉴相方式得到差拍中频相位,根据拍信号相位与瞬时拍频成正比的关系,推导出扫频非线性的表达式,设定非线性为0,反算校正的修正电压,经三次修正后,非线性由22.7%校正到0.09%。
2010年,南京电子技术研究所潘磊,刘光炎[11]通过分析FMCW激光雷达调频非线性对拍信号的影响,采用去斜滤波器和剩余视频相位消除技术先将参考路信号的非线性消除,然后对测量路的非线性进行校正,将拍频校正为恒频率,从而完成非线性校正。
2012年,北京航空航天大学的宋凝芳[12]等通过校正1.55μm调频连续波(FMCW)激光雷达的二次和三次调谐非线性系数,实现了30m范围内测距准确度优于10mm,测速精度优于0.05mm/s。
2013年,哈尔滨工业大学的唐烽[13]分析了FMCW激光雷达测距模型以及雷达距离速度耦合与激光器调频非线性等问题。非均匀时钟采样进行调频非线性校正,推导了拍频信号相位信息不受调频非线性影响的机理。建立了初步的误差模型,进行了仿真,得到了5ppm的测量精度,但未进行实际的测量实验。
2014年,天津大学的时光、张福民、曲兴华[14]等分析了影响激光调频连续波绝对距离测量分辨率的主要原因,采用长延迟校正路对测量路进行等间隔采样的方法来抑制调频非线性带来的影响。改进的测距系统,实现了10m的测量范围,测距的分辨率达到了50μm。2016年,又提出基于硬件的等光频间隔采样消除调频连续波激光测距系统调频非线性的方法,改进后的等光频间隔采样通过硬件数据采集即可一步实现,无需再进行后续繁杂的软件处理过程,极大地节省了内存空间和数据处理时间。实验结果表明,基于硬件的等光频间隔采样方法比基于软件的等光频间隔重采样方法更简单并且具有更好的非线性消除效果,更高的测距分辨力和稳定性[15]。
2016年,杭州电子科技大学时光、王文[16]等研究了提出了双干涉光路调频连续波激光测距方法,利用两个干涉系统得到的干涉条纹数量的比值计算得到被测目标的距离,消除了激光器光频率调制非线性对测距精度的影响,实现了65μm的测量分辨率和15μm的重复测量精度。
2018年,北京航天计量测试技术研究所通过设计调频激光测距非线性误差校正支路,采用误差循环迭代的方法对激光器频率进行非线性校正。当多次误差循环迭代次数大于10次,其拍频信号的频率误差可保证在±25Hz范围之内。同时设计了补偿通路,采用扩频相位误差相关补偿的方法对线性调频连续波回波信号的相位误差进行有效补偿,从而提高了测距精度,实现了测距范围大于50m,测量误差小于50μm。
3.3 仪器设备发展现状
目前国际市场上已经出现了高精度的激光雷达产品,国内尚无成熟的商业化产品。日本Nikon公司推出的激光雷达MV型号的工业激光雷达,测量精度较高,在大尺寸物件以及复杂形貌物件的三维几何现场检测领域以及产品质量检测、逆向工程和复杂曲面的高精度扫描领域应用广泛应用。如大型飞机的装配[17~18],轮船螺旋桨叶片测量[19],大型天线表面测量等。但核心技术均受到了严格的保密或国外专利保护,处于垄断地位,售价高达400万人民币,后续维护价格也需要很大投入。
Nikon 公司推出了MV331和 MV351[20]两款激光雷达如图5所示,两款测距范围分别为30m和50m,其他各项参数相同,如表1所示。
北京航天计量测试技术研究所通过“国家重大科学仪器设备开发专项”项目“大尺寸非合作目标三维形貌测量仪开发与应用”支持,研制了调频式三维形貌测量仪样机,如图6所示,各项参数如表2所示。该样机可实现大尺寸非合作目标的三维形貌测量,已成功应用于大(重)型运载火箭装配现场,用于对运载火箭零部件和总体装配前后形貌变形量进行比对测量。该样机还可用于卫星天线、飞行器气动外形、风机叶片、高铁样机车头等三维形貌测量问题,满足航天、航空、船舶、高铁、风电、汽车等领域中超大尺寸表面三维形貌快速精密测量的需求。

图5 Nikon公司激光雷达产品MV331/351

表1 MV331(351)各项参数

图6 调频式三维形貌测量仪样机
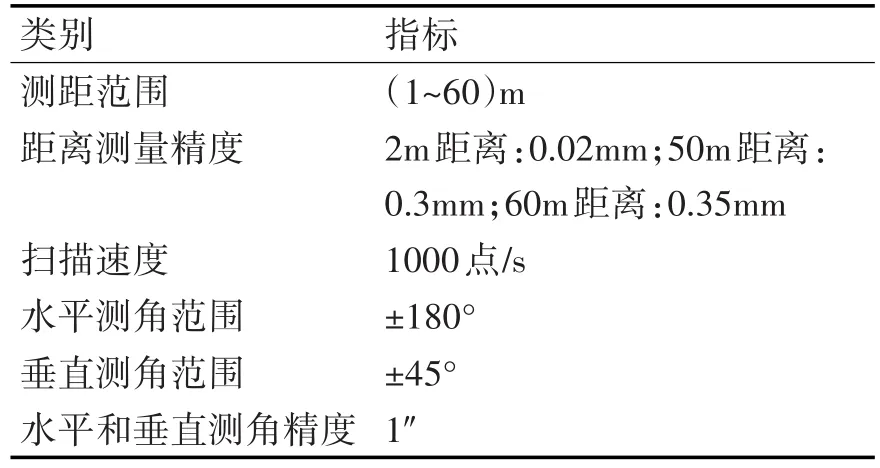
表2 调频式三维形貌测量仪各项参数
4 结语
从以上研究可以看出,调频连续波测距非线性校正技术从直接提高激光器的调频线性度向采用新技术对可调谐激光器进行补偿的方法发展,前者由于受到固体激光器跳模和反馈控制结构本身精度的限制,很难达到更高的精度和分辨率,后者通过光频梳或者重采样技术对可调谐激光器调频线性度进行补偿,已取得一些进展。
目前,国外调频连续波测距技术的研究由于起步较早,在非线性校正技术的研究已经取得了丰硕的研究成果,实现了调频连续波测距产品的商品化,在测量精度和测量分辨率方面均达到了较高水平。我国由于起步较晚,整体水平较国外还比较落后,很多技术方案还处于实验室阶段,尚未实现产品化。在下一步的发展中,如果能解决好调频连续波测距非线性问题,实现调频连续波测距产品的国产化,将在航空航天、汽车和船舶制造业、工业检测领域获得广泛应用。