毛刷式自动收枣装置
2019-05-31马秉政陈天庆侯浩南张静胜
马秉政,宋 岩, 陈天庆,侯浩南,张静胜
(沈阳化工大学 机械工程学院,辽宁 沈阳 110142)
1 工作原理及其过程
本装置是毛刷式收枣装置,装置底部为背架,背架上套有背带,背架底部有两个普通轮子和一个万向轮。因此,本装置既可由人工背着进行作业,也可在地面上滑行进行作业,使得装置可适应各种复杂的地形。在装置滑行作业时,使用者既可以通过万向轮调整方向,又可以实现随时刹车。转盘和转轴能够实现上方装置方向的任意调节。使用者可以通过调节扭动开关方便、舒适地调节拉杆长度,并在万向轴的上面加有螺丝可以手握杆可以拆卸,并在收集装置下加有收集管,从而满足更多地实际需求,体现了人性化的设计理念。本装置采用电动机为动力来源,利用齿轮啮合将电极的转动传递到中心旋转轴的转动,从而使得装置运行。减速器通过齿数少的齿轮啮合齿数多的大齿轮,从而达到减速的目的。当轮齿盘低速转动时,相邻两组毛刷接触到枣时,因枣的直径小于转齿盘的间距,不同转轴上两根相邻的毛刷便会把枣刷落,并且可以使枣叶和细枝条通过此间距。此外,通过调节转齿盘的组数本装置可以根据红枣的大小对红枣进行分类。毛刷具有良好的韧性,且表面硬度相对金属材料更低,对枣的表面损害较小,并且整个装置通过蓄电池提供能量。
2 机械系统设置
背、推两用式电池架既可由人工背着进行作业,也可在地面上滑行进行作业,使得装置可适应各种复杂的地形。装置底部为背架,背架上套有背带,背架底部有四个万向轮,在装置滑行作业时,使用者既可以通过万向轮调整方向,又可以实现随时刹车。并在万向轴上方安装了可拆卸装置,可以改装成手持装置,使装置更具有自由性,具体如图1所示。
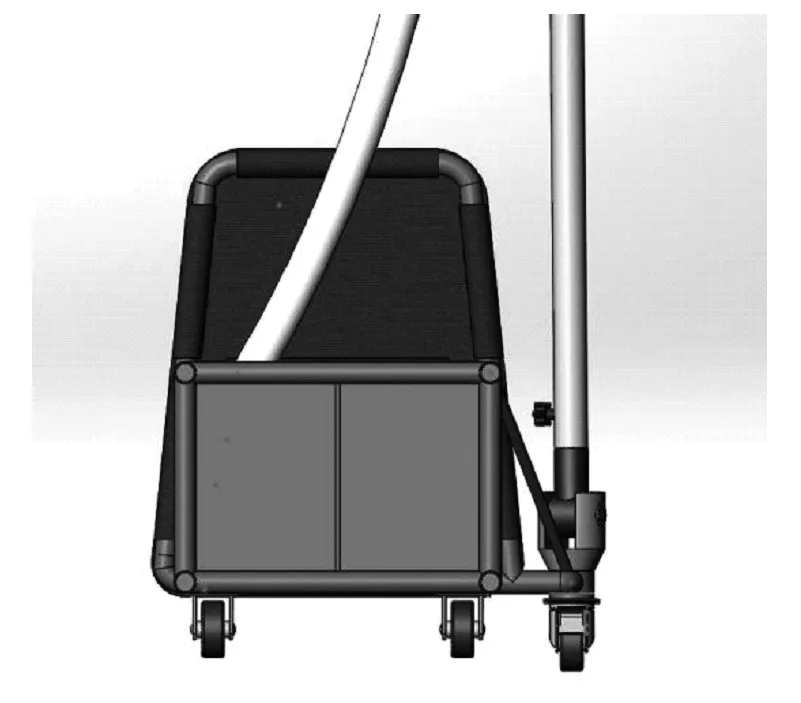
图1 背、推两用机构
转盘和转轴机构结构如图2所示,转盘和转轴机构连接的上方装置在空间内任意角度旋转。因此,通过转盘和转轴系统,实现上方装置方向的任意调节,从而满足装置在各个方向上工作的目的。

图2 转盘和转轴机构
伸缩杆机构如图3所示,伸缩拉杆机构满足实际需求,体现了人性化的设计理念。

图3 伸缩杆机构
减速机构如图4所示,减速机构由不同规格的齿轮组成,通过小齿轮与大齿轮的啮合,从而达到减速的目的。
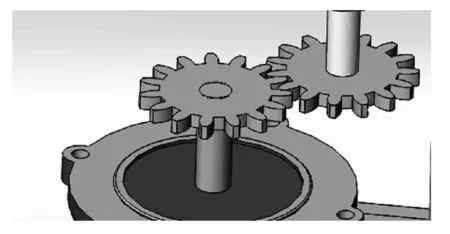
图4 减速机构

图5 传动装置
传动装置如图5所示,传动机构电动机主轴经过减速机构减速后,带动竖轴旋转,通过两个相啮合的锥形齿轮后,可使得中心旋转轴旋转,带动转齿盘转动,从而带动后面两齿轮相向啮合转动带动毛刷转动。
毛刷结构如图6所示,转齿盘结构与梳齿结构,每一组转齿盘都有三个一组可随轴转动且绕轴均匀分布的毛刷,两组相邻毛刷之间的距离小于所要摘取的枣的最小直径。这样设计的目的是,当相邻两组毛刷接触到枣时,因枣的直径小于两毛刷之间的间距,不同转轴上两根相邻的冒酸便会把枣刷落,并且可以使枣叶和细枝条通过此间距。此外,考虑到不同地区红枣的大小不尽相同,本装置可根据实际需求选择组数不同的转轴,毛刷组数越多,每相邻转刷毛之间的距离越小,因而可摘取直径较小的红枣。对于同一地区的红枣,也可通过调节毛刷的组数完成根据红枣的大小对红枣进行分类的任务。转齿盘上的毛的稀疏结构是为了防止个别红枣在装置旋转工作时滑离,此类机构可以有效地避免此类情况的发生。
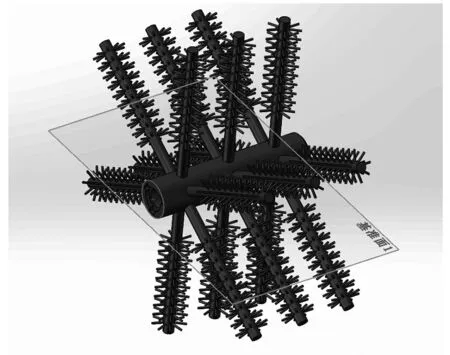
图6 毛刷结构
