多阈值优化的运动图像轮廓特征提取方法*
2019-05-31陈超
陈 超
(厦门大学嘉庚学院 体育教学部, 福建 厦门 363105)
随着模式识别与图像处理技术的不断发展,运动图像轮廓特征提取在相关运动领域得到充分重视[1-2].运动图像受到特定复杂环境的影响,会产生轮廓特征模糊和曲率符号特征点不均匀等问题[3].在现有运动图像轮廓特征提取方法中,使用最为广泛的是阈值约束下特征提取方法,该方法以运动图像轮廓特征信息为基础,结合边缘区域与其他区域的像素差异性设定阈值,快速准确地提取出图像边缘中用户感兴趣的信息[4-5],并且它可以自动弥补图像不清晰等因素造成的提取不准确问题,所以以阈值为基础的运动图像轮廓特征信息提取成为当前研究的热点内容.
文献[6]提出一种基于随机森林算法的图像特征提取方法.利用数学分类的形式,将图像中包含的边缘轮廓内容信息进行阈值设定,采用优化训练后的随机森林分类算法,对轮廓阈值进行映射分类处理,实现图像轮廓特征提取.但是该方法对阈值进行了两部分处理,导致算法的特征信息提取时间过长.文献[7]提出一种基于多尺度融合的图像特征提取方法.该方法利用高斯金字塔将运动图像分解,将分解结果划分到多尺度空间中,并以此为基础设定阈值,提取运动图像的多尺度特征.该方法具有较高的识别率,但是分割的准确度较低.
针对传统方法存在的一系列问题,本文提出一种新的特征提取方法——多阈值优化的运动图像轮廓特征信息提取方法.
1 算法设计
1.1 模糊约束下的多阈值计算
运动图像轮廓特征边界往往比较模糊,可利用最大类间方差法结合类间分类能力对运动图像特征设定多个阈值,并利用模糊隶属度函数约束完成多阈值计算优化,具体过程如下:
将运动图像的边缘根据灰度数据空间转换到图像模糊空间,运动图像轮廓模糊隶属函数可转换为一个较简单的线性函数来替代,得到快速简单的阈值,即
(1)
式中:xmm为运动图像像素的灰度值;xT为不同图像的像素灰度值.利用运动图像轮廓特征低灰度范围和高灰度范围定义模糊矩阵,使运动图像轮廓特征低灰度范围的信息损失较小,达到较好的分类结果.
由于运动图像灰度等级为0~255,将阈值作为一个变量,根据像素特征对阈值进行约束设定,从运动图像矩阵中,随机选取不同轮廓点,计算隶属度函数为
f=w1(u1-v)2+w2(u2-v)2+Qmn
(2)
式中:u1、u2分别为由中心阈值T所划分的运动图像两个区间灰度值的平均值;w1和w2分别为运动图像灰度值小于T和大于T时的概率;v为整个运动图像轮廓特征信息的灰度平均值.
根据约束隶属度[8]计算最佳阈值,然后设定一个波动阈值A,在[xT-A,xT+A]范围内进行最大类间方差求值,以获取最优图像多阈值.
1.2 曲率符号边缘特征提取
利用计算得到的多阈值对运动图像中的目标体轮廓线进行处理,计算轮廓线范围内中心点近邻的两个轮廓点的几何中心值,并根据计算结果进一步计算曲率角,得到曲率符号,依据曲率符号提取运动图像特征.具体过程如下:
对运动图像进行边缘检测与轮廓提取,获取图像中目标体的轮廓线,记作P,且P=p(i),p(i)为轮廓线上的像素点,将该闭合轮廓线分为两条一维离散曲线x(i)、y(i),则轮廓线可描述为
P={p(i)=(x(i),y(i))|i=0,1,…,m-1}
(3)
式中:i为像素点编号;m为像素点的总数.受到图像形成过程中误差与噪声的影响,x(i)、y(i)曲线并不平滑.本文利用自适应平滑方法[9]对曲线进行处理,设S(x)表示不平滑曲线上的离散信号,对其进行t+1次迭代处理,得到的平滑信号为
(4)
(5)
式中,kt(x+i)为卷积权值,kt(x+i)≥0(-N≤i≤N).自适应平滑过程中,N=1,则kt(x)表示为
(6)
式中,∂为平滑系数.系数越大,平滑效果越强,平滑作用过强会导致不平滑点缺失而使曲线钝化,产生图像轮廓线收缩差.系数的大小需要根据轮廓线的不平滑程度与图像噪声来选择.
完成平滑处理后,以像素点p(i)为中心,R为半径的图像范围计算轮廓线的曲率角,减小图像的误差与噪声.像素点p(i)与半径R内各点组成的图像区域为
D(i)=kt(x)p(i)=[x(j),y(j)]
(7)
式中,j为p(i)周围半径R范围内的像素点编号.
p(i)近邻的两区域中心点分别为pf(i)、pb(i),pf(i)和p(i)及p(i)和pb(i)所组成的向量方向角分别为
(8)
(9)
式中:xf(i)、yf(i)分别为pf(i)的横、纵坐标;xb(i)、yb(i)分别为pb(i)点的横、纵坐标.轮廓线的曲率角为
θ(i)=Si(θb(i)-θf(i))
(10)

通过曲率角来定义曲率符号,得到曲率符号为
(11)
式中,T2为预设曲率角参照值.根据各点对应的曲率符号进行标记,并以此区分图像轮廓线不同特征像素点,完成运动图像轮廓特征信息提取.
2 实验结果与分析
为了验证所提多阈值优化运动图像轮廓特征信息提取方法的综合有效性,本文进行了仿真实验,实验环境为Intel Core2Quad2.33 GHz CPU,4 Gbit内存,WindowsVista操作系统,开发环境为vc.net.
实验使用的图像采集部件为Tek Gear,在高速运行的汽车中部署该部件.样本图片来源为汽车行驶过程中道路两边的视频图像.选取180帧和268帧的样本图像作为实验分析对象,原始图像如图1所示.采用基于小波变换的图像特征提取方法、基于随机森林算法的图像特征提取方法及本文方法获取的运动图像边缘轮廓特征图分别如图2~4所示.
图1 原始图像Fig.1 Original images
对比分析图2~4可知,本文方法提取运动图像边缘轮廓特征点时,标记的特征像素点准确,同时未出现重复标定问题;而基于小波变换的图像特征提取方法获取的运动图像特征像素点存在严重的信息缺失;基于随机森林算法的图像特征提取方法获取的运动图像特征像素点存在重复率过高的问题,极大降低了运动图像特征点提取的精度.对比说明本文方法提取的运动图像边缘轮廓特征像素点更加准确,是一种有效的运动图像轮廓特征提取方法.
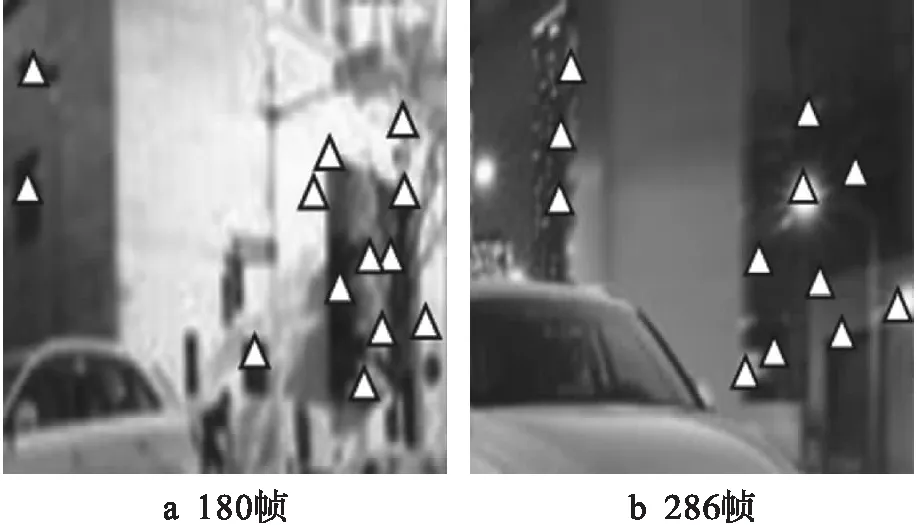
图2 基于小波变换的边缘轮廓提取结果Fig.2 Extraction results of edge contour based on wavelet transformation

图3 基于随机森林算法的边缘轮廓提取结果Fig.3 Extraction results of edge contour based on stochastic forest algorithm

图4 本文方法的边缘轮廓提取结果Fig.4 Extraction results of edge contour based on proposed method
将图4中的286帧图像作为原始图像,利用最大类间方差法对运动图像特征设定阈值,获取最新的隶属度函数,以此完成图像的多阈值优化,在此基础上完成对图像特征的提取.将多阈值优化后的图像进行分析,并与实际值进行对比,结果如图5所示.
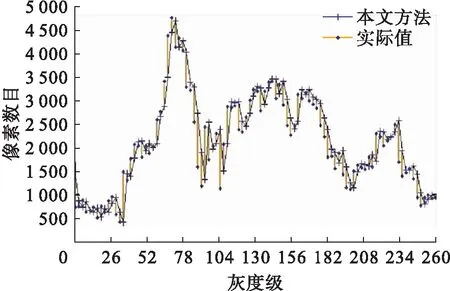
图5 多阈值对比图Fig.5 Multi-threshold comparison
根据图5可知,多阈值优化后的图像与实际情况基本一致,表明多阈值优化效果较好,为下一步对运动图像轮廓特征的提取奠定了良好的基础.
在对实验图像进行多阈值优化后,通过计算曲率角来实现运动图像轮廓特征信息的提取.分别采用所提方法与基于小波变换的图像特征提取方法及基于随机森林算法的图像特征提取方法进行曲率角计算误差率对比,选取180帧的图像样本50幅,总共进行40次实验,分别选取10、20、30和40次实验数据进行误差率对比,结果如表1所示.表1中,A代表所提方法,B代表基于随机森林算法的图像特征提取方法,C代表基于小波变换的图像特征提取方法.

表1 曲率角计算误差率对比结果Tab.1 Comparison results of calculation error rates of curvature angles
分析表1可知,所提方法的提取误差率一直在10%左右;基于随机森林算法的图像特征提取方法的曲率角计算误差率一直处于不稳定的状态,曲率角计算误差率最低为75.54%;而基于小波变换的图像特征提取方法的曲率角计算误差率保持在90%以上.由上述分析可知,所提方法的曲率角计算误差率在3种方法中最低,且差距明显.
为充分验证本文方法的优势,选取特征信息提取精度和特征信息提取时间为指标进行对比,特征信息提取精度对比结果如图6所示.由于图像特征点分布呈现离散化状态,所以对特征点提取精度结果也对应使用离散点进行表示.

图6 特征信息提取精度对比Fig.6 Comparison of extraction accuracy for feature information
分析图6可知,所提方法的特征信息提取精度一直处于相对稳定的状态,并且平均值在90%以上,能够准确提取特征;基于随机森林算法的图像特征提取方法特征提取精度较低,最高仅为83%;而基于小波变换的图像特征提取方法的特征信息提取精度在20 ms后开始呈下降趋势,不稳定,无法准确提取特征信息.主要原因在于:本文首先根据遗传算法,在特定范围内进行最大类间方差求值,获取了最优图像多阈值,在此前提条件下进行图像轮廓特征提取,从而提高了轮廓特征信息提取精度.3种方法提取时间对比结果如表2所示.
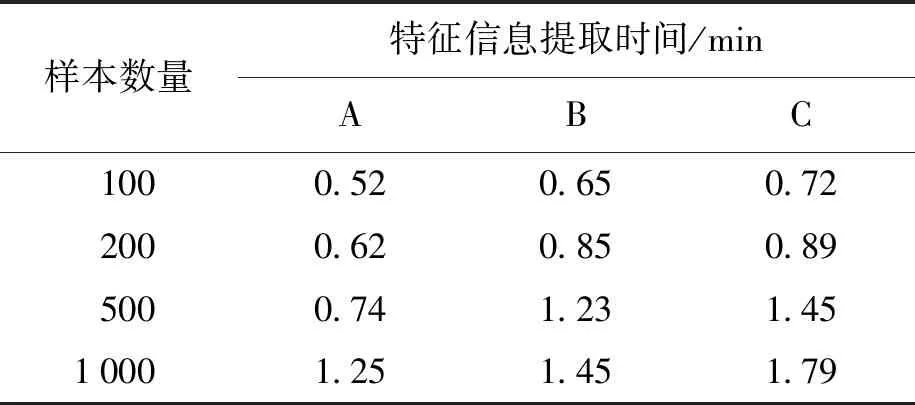
表2 特征信息提取时间对比结果Tab.2 Comparison results of extraction time for feature information
通过数据对比可知,所提方法的特征信息提取时间明显低于其他两种方法,在3种方法中用时最少.原因在于:本文将图像轮廓特征提取转化为图像轮廓线不同特征像素点区分问题,在标记出对应的曲率符号后,便可较为便捷且精确地区分像素点,有效降低了本文图像特征信息提取时间.
3 结 论
为了实现运动图像特征的准确提取,为模式辨识以及图像处理提供可靠的分析依据,本文以阈值为基础,提出一种多阈值优化的运动图像轮廓特征提取方法,解决运动状态对运动图像特征类间方差的干扰,提高运动图像曲率符号边缘特征提取精度.将本文方法应用到车辆运动图像轮廓特征提取过程中发现,相对于基于小波变换及基于随机森林算法的图像特征提取方法,本文方法提取的运动图像轮廓特征像素点准确、全面,不存在重叠和缺失问题.本文方法曲率特征计算误差率基本保持在10%左右,具备较高的提取精度.
