基于ANOVA 和BP神经网络的最优肌电信号测量位置选择
2019-05-30吴常铖严余超曹青青费飞杨德华徐宝国宋爱国
吴常铖 严余超 曹青青 费飞 杨德华 徐宝国 宋爱国


摘要 基于肌电信号的手部动作识别中,肌电信号测量位置的选择直接关系到动作识别的准确率.本文以使用最少的肌电传感器和获得较高的动作识别率为目标,提出一种基于ANOVA(方差分析)和BP神经网络的肌电信号测量位置优选方法.使用4个肌电传感器采集受试者做出指定动作时的肌电信号,提取肌电信号的时域特征,并按测量位置组合构成15个不同的样本进行BP神经网络的训练和测试.采用单因素ANOVA分析测量位置对动作识别结果影响的显著性,采用Tukey HSD将测量位置进行归类,并从动作识别率最高的子集中选择测量位置最少但识别准确率最高的测量位置组合作为最优的肌电信号测量位置.实验结果表明,测量位置对动作识别的结果具有显著的影响,随着测量位置数的增加,动作识别准确率呈上升趋势,最优的测量位置组合为P1+P3+P4,其动作识别准确率为94.6%.
关键词 表面肌电信号;动作识别;神经网络;方差分析
中图分类号 TP241
文献标志码 A
0 引言
表面肌电信号是众多肌肉纤维中的动作电位传播到皮肤表面叠加而成的一种微弱生物电信号.由于蕴含了肢体活动信息,能够在一定程度上反映神经肌肉的活动状况,因此肌电信号在肌肉状态评估、假肢控制及康复等领域有着广泛的应用.
手势动作识别是肌电信号最重要的应用之一,国内外学者在这方面做了大量的研究[1-4].文献[5]提出一种自学习方法,采用2个肌电传感器测量手臂上一对拮抗肌表面的肌电信号,实现了仿生假手的抓握控制;文献[6]利用小波变换和神经网络实现了单通道肌电信号的动作识别;文献[7]采用高密度电极测量残疾人残臂上的肌电,并提出3种新的肌电信号时域特征,动作识别准确率达到92.00%±3.11%;文献[8]提出了一种基于瞬时肌电信号的动作识别方法.为了获得较高的动作识别准确率,学者们通常使用更多的肌电传感器来进行肌电信号的采集,然而数量过多的传感器会给信号采集带来不便.
本文针对手部动作识别中的肌电测量位置选择问题,提出一种基于ANOVA(方差分析)和BP神经网络的最优肌电信号测量位置选择方案,在保证动作识别准确率的情况下减少肌电信号的测量点.
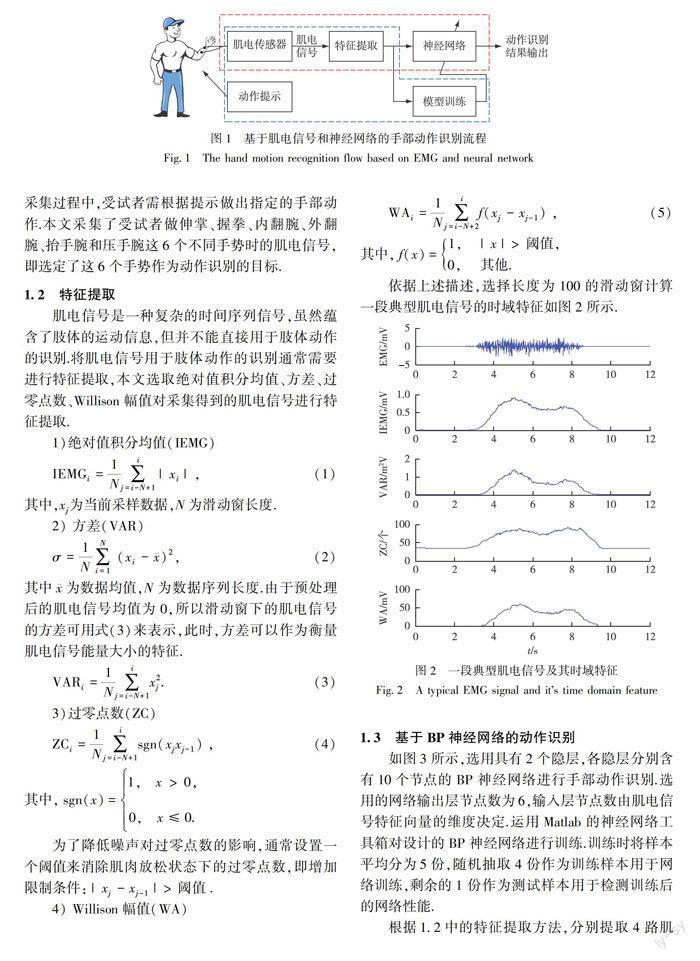
1 基于肌电信号和神经网络的手部动作识别
如图1所示, 基于肌电信号和神经网络的手部动作识别主要包括模型训练和在线动作识别两个环节.模型训练环节,受试者根据动作提示做出相应的动作,在此过程中粘贴于受试者皮肤表面的肌电传感器采集人体手臂肌肉表面的肌电信号,采集得到的肌电信号经过特征提取后用于模型训练.完成模型训练后得到的模型参数可用于在线动作识别,即进行在线动作识别时,从肌电信号中提取到的特征值将直接输入神经网络进行计算得到动作类型.
1.1 信号采集
将4个表面肌电信号传感器粘贴在人体手臂皮肤表面的4个不同位置(肱桡肌(P1)、指伸肌(P2)、尺侧腕伸肌(P3)、肱侧腕屈肌(P4))进行肌电信号的采集.传感器的信号采样率设置为1 kHz.信号
EMG measurement position optimization based on ANOVA and BP neural network.〖SX)〗〖SM)〗
采集过程中,受试者需根据提示做出指定的手部动作.本文采集了受试者做伸掌、握拳、内翻腕、外翻腕、抬手腕和压手腕这6个不同手势
时的肌电信号,即选定了这6个手势作为动作识别的目标.
1.2 特征提取
肌电信号是一种复杂的时间序列信号,虽然蕴含了肢体的运动信息,但并不能直接用于肢体动作的识别.将肌电信号用于肢体动作的识别通常需要进行特征提取,本文选取绝对值积分均值、方差、过零点数、Willison幅值对采集得到的肌电信号进行特征提取.
1)绝对值积分均值(IEMG)
依据上述描述,选择长度为100的滑动窗计算一段典型肌电信号的时域特征如图2所示.
根据V1~V15的维度,采用图3中的网络结构设计15个不同的BP神经网络,并分别将V1~V15作为样本进行训练和检验,可以得到15个网络的动作识别准确率,即一种测量位置组合对应一个动作识别准确率.
2 基于ANOVA的肌电信号最优测量位置选择
方差分析(Analysis of Variance, ANOVA)是由R.A.Fisher提出的一种用于2个及2个以上样本均数差别显著性检验的方法.如表2所示,方差分析结果中的P值直接代表了被分析因素对结果的影响是否显著.
本文将肌电信号的测量位置作为影响动作识别结果的因素,通过单因素ANOVA分析肌电测量位置对动作识别结果的影响是否显著,同时利用Tukey HSD方法将测量位置进行分类,将对动作识别结果影响相似的测量位置组合归入同一子集.本文在识别率最高的子集中,选择测量位置最少且相同数量测量位置中识别率最高的位置组合作为最优测量位置.本文实验研究中利用SPSS软件对1.3中的15种特征向量的动作识别结果进行方差分析.
3 实验及结果
3.1 实验平台
本文实验研究中所用的肌电信号传感器为南京航空航天大学先进机器人与精密系统研究中心研制的便携式无线肌电传感器.该传感器内部具有通频带为10~500 Hz、放大倍数为1 000的信号调理电路,用于调理电极片从人体皮肤表面获取到的微弱肌电信号.传感器的采样率可通过软件设置为200~1 000 Hz,采集得到肌电信号后通过WiFi发送给计算机.图4所示为肌电传感器配套的上位机软件.
3.2 手势识别实验
6名健康的受试者(2女4男,年龄在23~26歲)参与了实验.实验场景如图6所示.实验分2个阶段进行.第1阶段为实验准备阶段,主要是为了让受试者熟悉整个实验流程和所需要完成的各种手势,并对肌电信号采集软件的相关参数进行调整,以便受试者能够更加顺利地完成整个实验.该阶段要求受试者连续完成每种手势15次.为了防止受试者疲劳,每2种手势动作之间,受试者有2 min的休息时间.第2阶段为手势识别实验阶段,该阶段实验分15组,每组包含30个手势动作,每种手势动作出现5次且各手势的出现顺序是由Matlab软件随机生成的.受试者根据软件界面的提示,完成对应的手势动作.为了避免受试者疲劳,每2组手势动作之间,受试者有5 min的休息时间.
根据1.2和1.3,将实验中获取的肌电信号特征数据按照位置组合进行分组,运用神经网络算法进行手势识别,统计得到各位置组合的手势识别结果如图7和图8所示.单一位置的手势识别率由高到低的顺序依次为P3、P1、P2、P4,2个位置组合的手势识别率由高到低的顺序依次为P1+P3、P2+P3、P1+P2、P1+P4、P3+P4、P2+P4,3个位置组合的手势识别率由高到低的顺序依次为P1+P3+P4、P1+P2+P3、P2+P3+P4、P1+P2+P4.图7中,P12表示P1+P2,其余组合依此类推.实验结果表明,手势识别率随着测量位置数量的增加而提高,在使用全部4个位置的肌电特征数据时,手势识别率最高,达到96.1%.
对15种位置组合的动作识别结果进行方差分析,结果如表3所示.表3中P值远小于0.01,表明不同肌电信号测量位置的手势识别率具有显著的差异.采用Tukey HSD做进一步分析,结果如表4和图9所示.Tukey HSD分析结果显示,15种位置组合共被分到8个子集,手势识别率最低的子集(第1子集),包含P4,手势识别率最高的子集(第8子集),包含P1+P2+P3、P1+P3+P4、P1+P2+P3+P4.对手势识别率次高的子集(第7子集)分析,2个位置组合(P1+P3)的手势识别效果可以与一些3个位置组合(P1+P2+P4、P2+P3+P4)类似.根据前文提到的最优位置组合的选取原则,最优的位置组合为P1+P3+P4.
4 结束语
本文针对基于肌电信号动作识别中的测量位置选择问题,提出一种基于BP神经网络和单因素ANOVA的测量位置优选方法.本文首先选定了6个常用手势(握拳、伸掌、内翻腕、外翻腕、抬手腕、压手腕)作为动作识别的目标,选定4块肌肉(肱侧腕屈肌、肱桡肌、指伸肌、尺侧腕伸肌)作为备选的肌电信号测量位置.受试者做出指定目标动作时,采集受试者手臂上的肌电信号并进行特征提取,根据不同的通道数量对提取后的肌电特征数据进行组合,得到15个肌电特征向量.分别将15个肌电特征向量作为样本,对BP神经网络进行训练和测试,得到不同测量位置组合对应的动作识别率.最后以测量位置组合作为影响动作识别准确率的因素,采用单因素ANOVA和Tukey HSD对15个肌电特征对应的动作识别结果进行分析.实验结果表明,最优的测量位置组合为P1+P3+P4,即采用肱桡肌、尺侧腕伸肌、肱侧腕屈肌的信号进行动作识别的方案为最优测量位置方案.
参考文献
References
[1] Ariyanto M,Caesarendra W,Mustaqim K A,et al.Finger movement pattern recognition method using artificial neural network based on electromyography (EMG) sensor[C]∥International Conference on Automation.2016
[2] Oleinikov A,Abibullaev B,Shintemirov A,et al.Feature extraction and real-time recognition of hand motion intentions from EMGs via artificial neural networks[C]∥International Conference on Brain-computer Interface.2018
[3] 肖凯,邹任玲.基于表面肌电信号的人体动作识别算法研究进展[J].生物信息学,2018,16(2):14-20
XIAO Kai,ZOU Renling.Research on human body motion recognition algorithm based on surface EMG signal[J].Chinese Journal of Bioinformatics,2018,16(2):14-20
[4] 杨亚慧,谢宏.基于卷积神经网络的表面肌电信号手势识别[J].微型机与应用,2017,36(15):59-61
YANG Yahui,XIE Hong.Research on surface EMG signal gesture recognition based on convolution neural network[J].Microcomputer & Its Applications,2017,36(15):59-61
[5] 吳常铖,宋爱国,章华涛.一种肌电假手的自适应模糊控制方法[J].仪器仪表学报,2013,34(6):140-146
WU Changcheng,SONG Aiguo,ZHANG Huatao.Adaptive Fuzzy Control Method for EMG Prosthetic Hand[J].Chinese Journal of Scientific Instrument,2013,34(6):140-146
[6] Mane S M,Kambli R A,Kazi F S,et al.Handmotion recognition from single channel surface EMG using wavelet & artificial neural network[J].Procedia Computer Science,2015,49:58-65
[7] Samuel O W,Zhou H,Li X,et al.Pattern recognition of electromyography signals based on novel time domain features for amputees limb motion classification[J].Computers & Electrical Engineering,2018,67:646-655
[8] Geng W,Du Y,Jin W,et al.Gesture recognition by instantaneous surface EMG images[J].Scientific Reports,2016,6,DOI:10.1038/srep36571
EMG measurement position optimization based on
ANOVA and BP neural network
WU Changcheng1,2 YAN Yuchao1 CAO Qingqing3 FEI Fei1 YANG Dehua1 XU Baoguo2 SONG Aiguo2
1 College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 211106
2 School of Instrument Science and Engineering,Southeast University,Nanjing 210096
3 School of Aviation Engineering,Nanjing Institute of Industry Technology,Nanjing 210023
AbstractThe locations of electromyography (EMG) measurements are directly related to the accuracy of motion recognitionin hand gesture recognition based on EMG signals.This study proposes an EMG measurement position optimization strategy based on ANOVA and back propagation (BP) neural network to obtain the best motion recognition with the fewest EMG sensors.Four EMG sensors are used to capture the EMG signals when the subjects perform specific hand gestures.Feature data extracted from the raw EMG signals are combined into 15 different vectors according to different measurement position combinations.These 15 feature vectors are used to train and test the BP neural network.Single factor analysis of variance (ANOVA)is employed to analyze the significance of the influence of the measured position on themotion recognition.Tukeys honest significant differencetest is adopted to classify the position combinations.The position combinations are divided into several subsets.In the subset with the highest recognition rate,the position combination with the least measurement position and the highest recognition accuracy is considered to be the optimized measurement position.The experimental results show that the measurement position has a significant impact on the results of motion recognition.The accuracy of motion recognition shows an upward trend with the increase in measurement position.The optimal combination of measurement position is P1+P3+P4,and the accuracy of motion recognition is 94.6%.
Key wordssurface electromyography;motion recognition;neural network;analysis of variance
