收割机控制中的英语语言理解动态领属研究
2019-05-27崔晓慧
崔晓慧
(焦作师范高等专科学校 外国语学院,河南 焦作 454000)
0 引言
我国的粮食作物以稻麦类为主,种植面积大,产量高,在生产过程中需要投入大量的人力和物力。收割是作物生产的最后环节,对粮食的产量和品质都有着直接的影响。稻麦类作物的收割时期短,工作量大,必须掌握合适的收割时机才能获得最佳经济效益。作物收割太早会因未完全成熟而损失日产量,收割太迟又会遭受鸟鼠虫害,并增加极端天气和自然落粒的损失。另外,在部分地区作物及时收割也有利于下茬作物的种植顺利开展[1]。
稻麦类作物的收割工作量极大,依靠人工难以顺利完成,因此收割机是农业机械发展的一个重点[2]。在传统农业时期,我国的稻麦作物基本采用人工收割。随着时代的发展,广大种植者逐步认识到农业机械化的优越性,为收割机的普及创造了条件。在目前的形势下,收割机的应用范围、综合性能和自动化程度已经成为农业现代化的一个衡量指标。理想的收割机应该能在较低的损失前提下具有最大的收割效率,良好的性能取决于收割机的结构设计、工作状态和操作水平。
我国的稻麦类作物大多采用联合收割机进行收割,且向着大型化和高速化的方向发展,对收割机的自动控制水平也提出了更高的要求。联合收割机的自动控制主要集中在行驶速度、割台高度、滚筒转速和喂入深度等方面。行驶速度是联合收割机作业效率和质量最重要的决定因素,最佳的行驶速度在保证合理喂入量的同时,还能避免谷秆分离效果变差和零部件损坏[3]。国内外学者进行了大量研究,以单片机和嵌入式微处理器为核心,设计出基于喂入量和滚筒转速的收割机行驶速度控制方法,有效解决了人工控制难度较大的问题[4-6]。
割台高度决定了作物的割茬高度,是实施秸秆还田和后续耕作须要考虑的因素。割台过低,会降低谷秆分离的效果,且增加滚筒的负荷;割台过高,又有可能漏割穗头。朱剑等设计了一种基于嵌入式的电液比例控制系统,用于对收割机的割台高度进行监测和控制,提高了自动化程度[7]。收割机的滚筒转速需要与喂入量匹配,才能获得理想的脱粒能力。李国栋等设计PID恒速控制器,按照恒速控制模型使收割机的滚筒转速能够保持稳定,并且进行了仿真验证[8]。喂入深度是半喂入式的联合收割机需要考虑的问题,对作业效率和质量的影响有限,因此相关的研究也较少,一般是在滚筒的入口处设置传感器进行检测[1]。另外,张认成等还设计了联合收割机的智能控制仿真器,通过控制收割机的行驶速度使滚筒保持额定的转速,可以实现对收割机的自动控制[9]。
精准农业是现代农业的发展方向,推动了农业生产的规模化和专业化,需要利用现代技术设计新型水稻收割机控制系统[10]。自然语言理解是语言信息和人工智能的交叉学科,以自然语言为载体实现人类与计算机之间的沟通,能够应用于机械的控制。语言理解赋予计算机准确理解自然语言涵义的能力,在宏观上使计算机执行人们所期望的语言功能,微观上将人类语言映射到计算机内部。语言理解目前在自然科学中主要用于机械设计和制造领域,是工序建模和三维重建的基础[11-12]。
人类的语言种类繁多,而英语凭借语法和语感的优越性成为世界上应用最广泛的语言。在自然语言理解研究的起始阶段,英语扮演了重要的角色,其在语言输入、语音识别和语法分析方面的优势是别的语言无法比拟的。英语语句是由单词按照各种关系组织在一起形成的,对这些关系的研究有助于准确理解英语语义。领属是英语中普遍存在的一种关系,关系的主体是英语所表达的两个名词,关系的具体内容为领有和属于。
领属关系可以分为静态领属和动态领属,前者指恒定的领属关系,后者指领有者发生了变化的领属关系[13]。联合收割机的部件众多,结构复杂,利用语言理解技术可以降低控制的难度。收割机作业过程会受到各种突发状况的干扰,语言理解中的名词领属关系以动态领属为主,才能应对环境的变化。因此,本文对英语语言理解的动态领属进行研究,探讨其在收割机行驶速度、割台高度和滚筒转速控制中的作用,以提高控制的精度,降低操作难度。
1 农机设备和硬件
农机设备为久保田4LBZ-172B型半喂入履带式联合收割机,额定功率66kW,采用液压无级变速。收割机的割台宽度为1.72m,收割5行,对水稻和小麦的收割效率达到0.27~0.53hm2/h。英语语言理解设备是戴尔I3668-18N2型台式计算机,配置包括Intel i5处理器、8GB内存和1TB硬盘,电源由拖拉机蓄电池提供。语言理解程序为visual C++,软件运行环境为Windows10操作系统。
2 英语语言理解
英语语言理解是对英语形式的语言信息进行分析,理解其表达的意义内容,并应用到机械的设计或控制过程中。英语语义的基本载体是单词,单词按照特定的语法依次组成语句、段落和篇章。英语语言理解的整体流程是首先分析单词的词法并形成语句,然后对语句进行句法分析和分类处理,修正容易产生歧义的语句以便得到规范化语句和句群。名词和动词是两类最主要的单词。其中,名词用于描述机械本身及组成部件,是动态领属的主体;动词描述对机械控制的执行内容;是动态领属产生的原因。各类单词词义分析成功后开始段落和篇章分析,围绕核心事件进行语用建模和理解,最终得到英语语言表达的内容,形成相应的农机控制指令。在词义和篇章分析失败的情况下,语言理解会返回到句法分析的环节,变换新的核心事件重新分析直至成功。
3 动态领属分析
领属关系是英语短语之间最重要的一种关系,对这种关系的理解是英语语言理解的关键。领属是指两个英语名词之间一方领有另一方,或者一方从属于另一方。从农业机械控制的角度来看,领属的主体可以是机械部件、属性、状态或性质。无论哪一种,领属者都是为被领属者提供认知的框架。对领属关系的研究既可以从英语句法形式上进行,也可以从英语语义上进行。
在领属关系中,大部分领有者和领有物之间的关系稳定且不发生转移,如物品与性质,属于静态领属;还有一种是原领有者的领有物可以变为现领有者的领有物,如物品与拥有者,属于动态领属。事物间的可让渡性是动态领属发生的内因,主要由英语定语和中心语的性质决定。
动态领属关系涉及到至少3个名词,分别为原领有者、现领有者和领有物,3个名词之间通过相应的动词联系在一起,联系动词主要为给予类和索取类动词。在英语语言理解的过程中,根据动态领属语句特征进行总结归纳,然后在系统中建模。动态领属事件模型放置在系统的知识库中,需要理解的语句被切分后在系统中匹配分析,根据设定的模式对符合模型的语句直接处理,从而获得语句的涵义。
英语语言输入后,系统根据知识库生成动态名词和事件,找出语句中的动态领属并进行分类。每种类型的动态领属分别进行不同的领属转移分析,再通过领有物和梯度树来确定让渡值,最后与知识库匹配,将各事件关联起来完成对篇章的分析理解,如图1所示。
4 控制功能
收割机的作业过程中,其运行状态和环境条件都是不断变化的,因此对收割机的控制也是一个动态的过程。收割机的控制过程中存在许多领属关系的让渡和转移,即动态领属事件。伴随着控制操作动作的执行,领有物的关系从原领有者上主动或被动地转移到现领有者上,实现领属关系的变更,如图2所示。
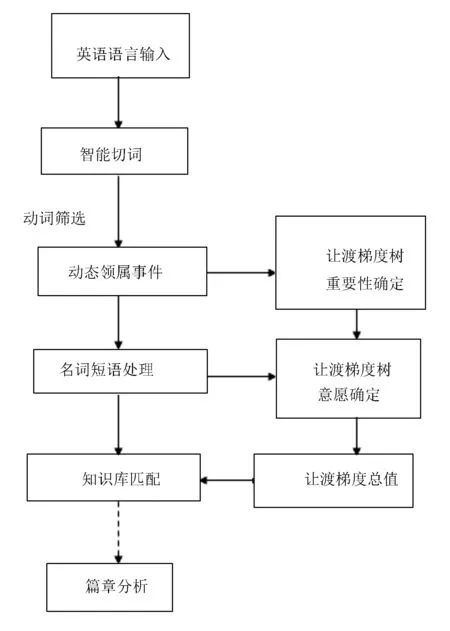
图1 动词领属事件的分析流程
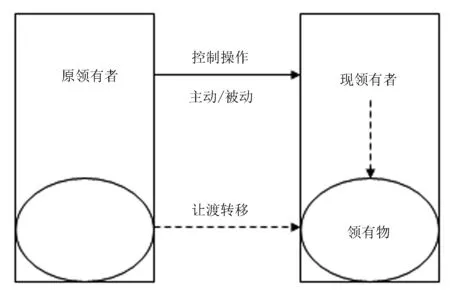
图2 农机控制中的动态领属事件
本文中,英语语言理解动态领属应用的收割机控制功能包括行驶速度、割台高度和滚筒转速。收割机作业时需要保持最合适的喂入量,而喂入量由行驶速度决定。安装在输送器底板上的压力传感器测定喂入量,输入分析系统中与额定喂入量比较。系统根据两者之间的差异产生控制指令,通过电磁阀调节无级变速器,实现对收割机行驶速度的控制。割台高度控制则是以超声波传感器测量割台实际高度,与设定的高度值比较,电液比例方向阀根据比较的结果控制割台的升降。收割机的滚筒转速通过PID技术进行控制,即比较滚筒的实际角速度和设定角速度差值,通过比例、积分和微分变换使滚筒保持恒速转动。
上述3种控制功能涉及到大量的机械部件和动作,执行过程中会出现多个动态领属事件。在这些动态领属事件中,领有物为信息、数据和指令等抽象事物,原领有者一般为各类传感器等数据采集装置,而现领有者大多为控制执行装置。作为核心的信息分析装置则兼有两种功能,让渡转移动词也有主动和被动两种形式。3种控制功能代表性动态领属事件中的相关主体如表1所示。
将应用了英语语言理解功能的联合收割机进行水稻收割试验,设定喂入量2.5kg/s,割台高度15cm,滚筒角速度50rad/s。在作业过程中,作物密度时常发生变化,机械速度也能进行相应的调节,传感器检测的喂入量维持在2.40~2.55kg/s之间,割台高度维持在14.0~15.0cm之间。当作物密度发生变化时,滚筒转速的突变较大,但是经过5s的调整后便能很快恢复到设定的速度上来,维持在47~52cm/s之间。因此,英语语言理解提高了收割机这3种功能的控制精度,使操作的难度得以降低。
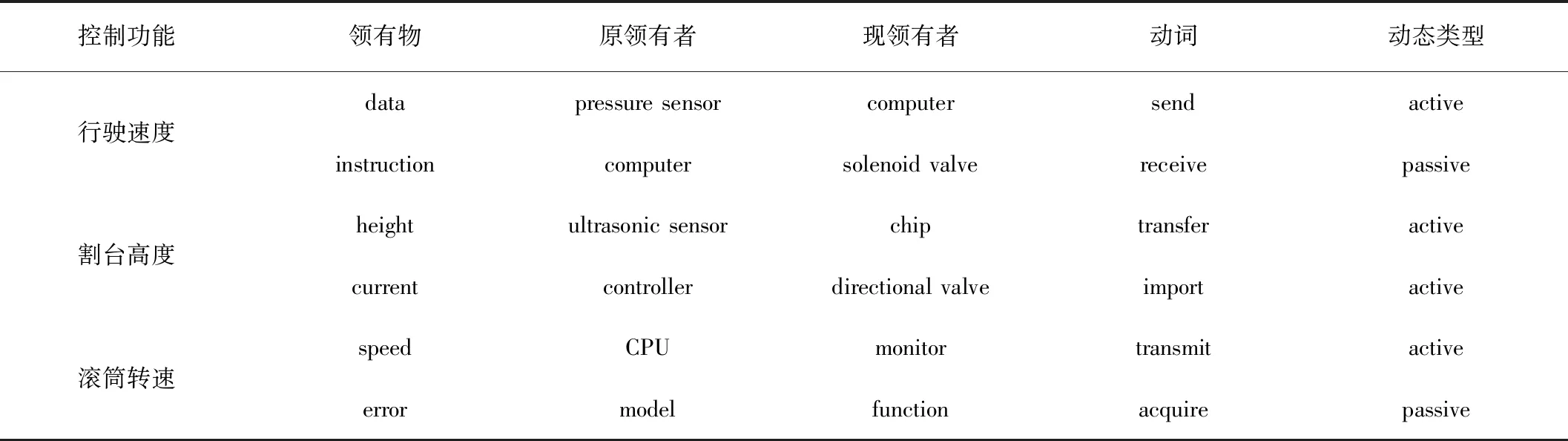
表1 不同控制功能的代表性动态领属事件
5 结论
英语语言理解是对英语形式的语言信息进行分析,理解其表达的意义内容。英语语义的基本载体是单词,单词按照特定的语法依次组成语句、段落和篇章。领属是两个英语名词之间的领有和从属关系,若领属关系发生转移,则属于动态领属,可以应用于机械的设计或控制过程。本文研究了英语语言理解动态领属在收割机行驶速度、割台高度和滚筒转速控制中的作用,列举了代表性的动态领属事件。试验结果表明:英语语言理解可以提高收割机的控制精度,降低操作难度。
