采棉机发动机罩网自动清理装置设计与分析
2019-05-24吴天松赵庆展王永烁
吴天松,胡 蓉,赵庆展,王永烁
(1.石河子大学 机械电气工程学院,新疆 石河子 832000;2.兵团工业技术研究院,新疆 石河子 832000)
0 引言
作为以棉花种植为主的农业大省,为了提升棉花收获的总体经济效益,新疆不断增加机采棉引进及推广应用,使农机化水平获得进一步提升[1]。新疆地处干旱区域,昼夜温差较大,气候较为干热,采棉机工作环境复杂[2]。采棉机工作时,周围会产生棉絮、砂粒、灰尘等杂质,且由于采棉机发动机涡轮在旋转时会产生负压,对发动机涡轮周围的棉絮等杂质产生吸力,因此采棉机发动机外侧装有防护罩网,防止杂质进入机箱内造成发动机故障[3]。一旦防护罩网上网孔被杂质堵塞,不能及时清理,发动机产生热量不能及时散发出去,发动机涡轮产生的负压也会急剧变化,发动机进气受阻,温度迅速上升,就会造成发动机故障[4]。清扫机在国外使用较早,发展也很迅速,用途较为广泛,技术上基本趋于成熟。M.Abdel Wahab等[5]根据实际有过被挤压的垃圾难以被清理的现象,分析了盘刷刷毛与垃圾颗粒接触的原理和能量的转换关系,获得刷毛与垃圾颗粒的最佳接触形式。Vanegas Useche,L.V等[6]创建了清扫车盘刷的物理模型,将刷毛依照分析悬臂梁形式进行建模。郭枭等[7]结合自动除尘系统工作状态中相应遮挡对其光伏元件输出影响和达到的除尘效果做了研究,提出导光伏元件自动除尘系统运行启动时刻与持续时间的设置,进而获得了良好的除尘效果。根据实地调研统计,采棉机在采收0.4~0.533hm2地时,采棉机驾驶员或其工作人员就会用清扫工具来清扫粘附在防护罩网上的杂质,不仅耗费人力,且清扫频率只是人为预估,并不能保证防护罩网上的杂质得到及时清理。为此,针对采棉机工作的实际需求,设计出了一种采棉机发动机防护罩网自动清理装置,旨在降低了采棉机工作人员的劳动强度,避免了人工清扫的不确定性,从而降低采棉机发动机的故障率,为采棉机发动机防护罩网自动清理装置后期进一步研发提供支持。
1 材料与方法
1.1 设计方案与工作原理
1.1.1 设计方案
采棉机防护罩网自动清理装置用于清扫采棉机发动机防护罩网上的杂质,主要包括机械结构设计和控制系统设计两部分[8], 如图1所示。该自动清理装置主要由电机、滑轨 、刷滚轴、丝杠、联轴器、PLC控制盒,以及用于与连接固定的螺栓、支撑座、轴承座等组成,可以对采棉机防护罩网进行往复清扫,清扫频率和时间可以根据具体环境设定。
1.1.2 工作原理
工作时,相应传感器实时监测网孔上杂质的吸附情况,当防护罩网上的杂质吸附量达到预定的警戒值时,传感器将感应到的物理量信号转换成相应的电信号给控制核心;控制核心发出指令控制电机A和电机B转动,电机A转动驱动刷滚轴转动,刷滚轴上的刷毛清扫防护罩网上粘附的杂质,电机B正转,驱动丝杠杆正向转动,驱动螺母沿驱动杆自前而后运动,则刷滚轴开始自前而后清扫采棉机发动机防护罩网的表面;当刷滚轴到达最后端后,PLC控制盒控制其电路使电机反转;驱动螺纹驱动杆反向转动,驱动螺母沿驱动杆自后而前运动,则刷滚轴开始自后而前再次清扫采棉机发动机防护罩网的表面;当刷滚轴到达最前端之后,触发电路行程开关,切断电机反转回路,电机转动停止,1个清扫周期完成。
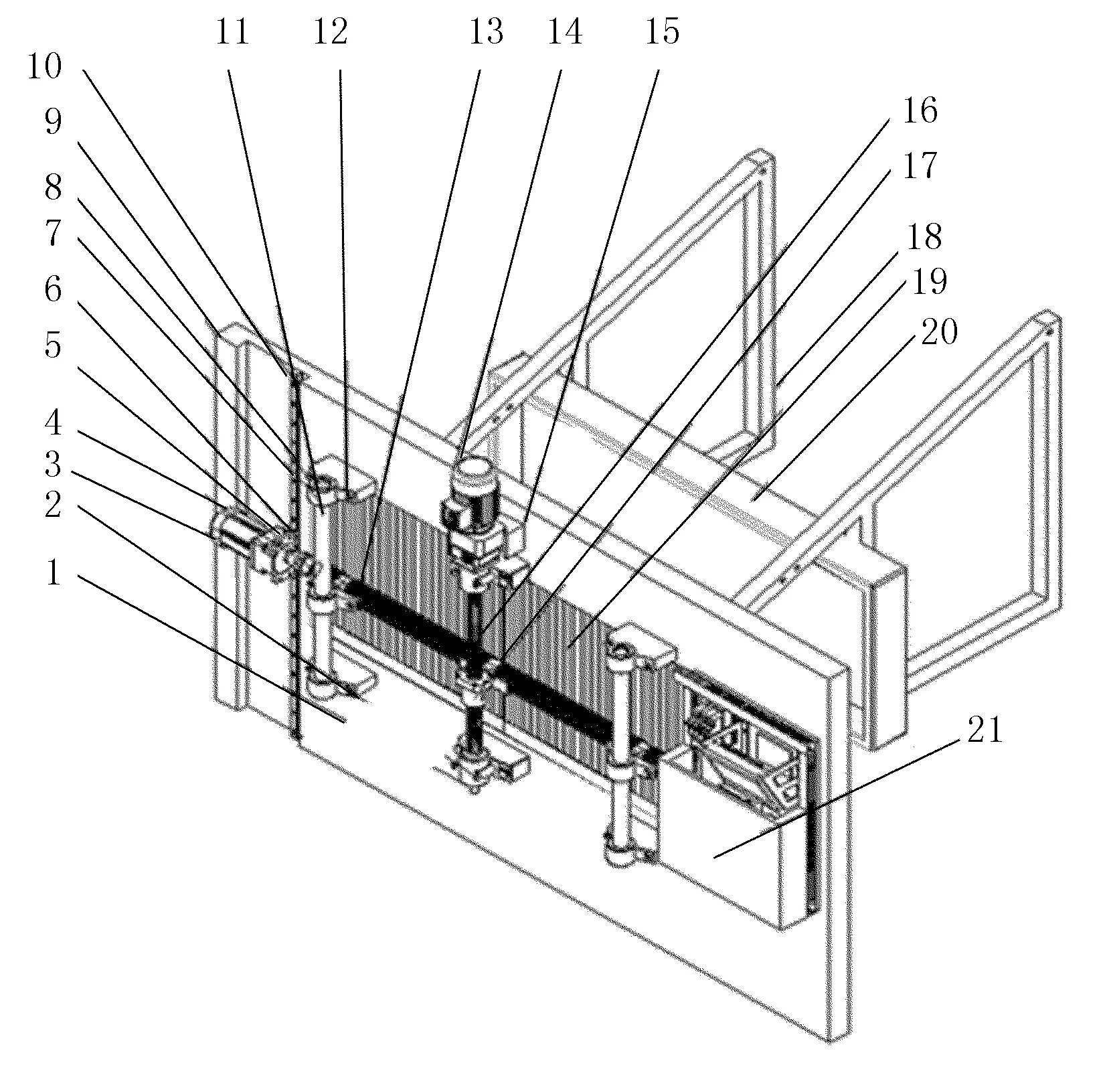
1.轴承座 2.螺栓B 3.电机A 4.联轴器 5.刷辊轴 6.滑块 7.支撑座 8.螺栓A 9.试验台板 10.滑轨 11.固定导向杆 12.刷滚轴轴承套 13.刷毛 14.电机B 15.电机B支撑座 16.移动丝杠 17.丝杠螺母 18.试验台支架 19.采棉机发动机防护罩网 20.杂质收集槽 21.PLC控制箱图1 采棉机发动机防护罩网自动清理装置的结构轴测图
1.2 关键部件的设计
1.2.1 刷辊轴的设计
目前使用的刷辊类型多种多样,常用刷丝直径约0.05~2mm,刷体最小直径为25mm,刷体最长 5.5m[9]。设计的采棉机发动机防护罩网清理装置,要边清扫边运动,考虑到刷杆的强度,选用圆柱实心毛刷辊;又由于为所洗物材质为碳钢结构的发动机防护罩网,所以刷毛用尼龙610,刷辊用 45钢。使用尼龙材质刷毛清扫发动机外侧的防护罩网进行清扫,不仅要求减少被清扫物的损伤,而且要求刷丝要有良好的弹性和一定的抗压性。所选尼龙610刷丝不仅弹性好,而且抗磨损性能和抗压性能良好。毛刷辊如图 2所示。
1.2.2 滚动轴承的设计
本装置根据设计要求选择深沟球轴承,其轴承座如图3所示。图3中,止推环用来固定轴承;圆槽的作用是密封,选用O形封圈。本设计使用深沟球轴承,选用滚动轴承座,并用1个止推环来固定轴承[10]。

图2 清扫刷辊

图3 滚动轴承座
1.2.3 运动导轨的设计
选用的滑轨为直线运动滚动导轨,主要由滑块、滚珠、端盖、导轨和回流模组组成,如图4所示。其特点是滑块和导轨之间用滚珠作为动力传输,可无限做摩擦较小的循环滚动,而且把滑块紧紧固定在导轨上,可以使清扫装置中的电机A沿导轨做高精度及高速的直线运动。

图 4 直线运动滚动导轨示意图
1)基本静额定负荷。当直线导轨处于静止状态时,如果受到大的冲击载荷,其珠道或者滚动体可能发生严重变形,影响导轨正常使用,因此要按静额定负荷对导轨来选型。基本静额定负荷为
C0≥FS·P0
(1)
式中C0—额定静负荷(kgf);
P0—单个滑块上的静负荷或冲击负荷(kgf);
FS—负荷安全系数,大小按表1选择。
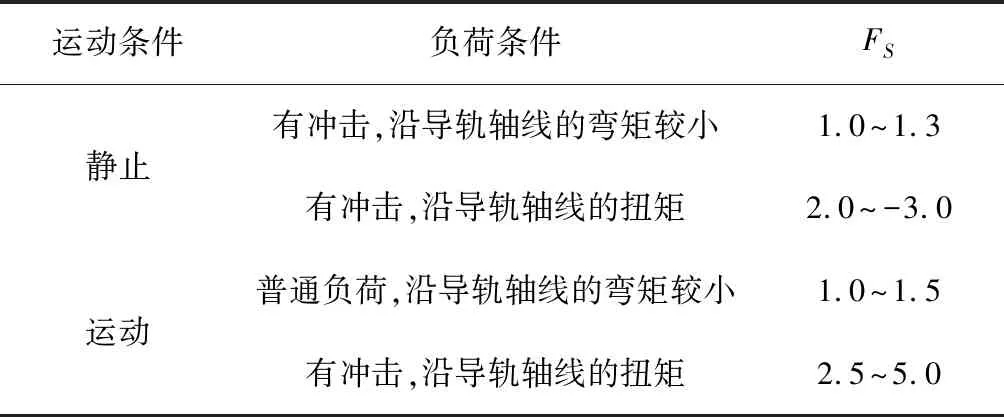
表1 静载荷安全系数
2)基本动额定负荷。当直线导轨处于工作状态时,如果其滚珠或珠道面承受了变力的作用发生了损伤,那么要按动额定负荷对导轨来选型[11]。
直线运动滚动导轨受到的载荷为p,其工作总行走距离L与其基本动额定负荷C的关系为
(2)
式中L—总行走距离(寿命)(km);
C—基本动额定负载荷(kgf);
P—导轨受到的载荷(kgf)。
因为实际的工作情形或许同实验条件有一定的差别,如其工作载荷会因实际状况改变等因素,所以把式(2)修改成
(3)
式中L—总行走距离(寿命)(km);
C—基本动额定负载荷(kgf);
fh—硬度系数;
ft—温度系数;
fc—接触系数;
fw—负荷系数;
PC—计算负荷(kgf)。
在设计时,寿命用时间来表示。设滚动导轨进行往复运动的行程为ls(m),每分钟的往复行程数为n1,工作总行走距离L(km)和时间寿命Lh(h)二者的关系表示为

(4)
2 清扫刷辊的模态分析
模态分析可以确定一个结构或机械零件的振动特性(即结构的固有频率和振型),避免与其他工作部件发生共振。刷辊作为清理装置的重要部件,如果电机、清理装置等各部件的振型频率与刷辊的频率相同,刷辊较容易发生共振,因此要对刷辊进行合理的模态分析。
2.1 模型的导入与材料属性的定义
将SolidWorks建立的刷辊模型导入ANSYS Workbench软件中,并设置模型的单位为mm[12]。为了便于计算,需要对有限元的模型给与简化,如图5所示。由于主要是分析刷辊轴的特性,所以本模型将刷辊上的刷毛简化掉,将轴承座及轴套用圆柱面约束进行了替代。根据相关计算及实际需求,刷辊材质采用Q235A较为合适。
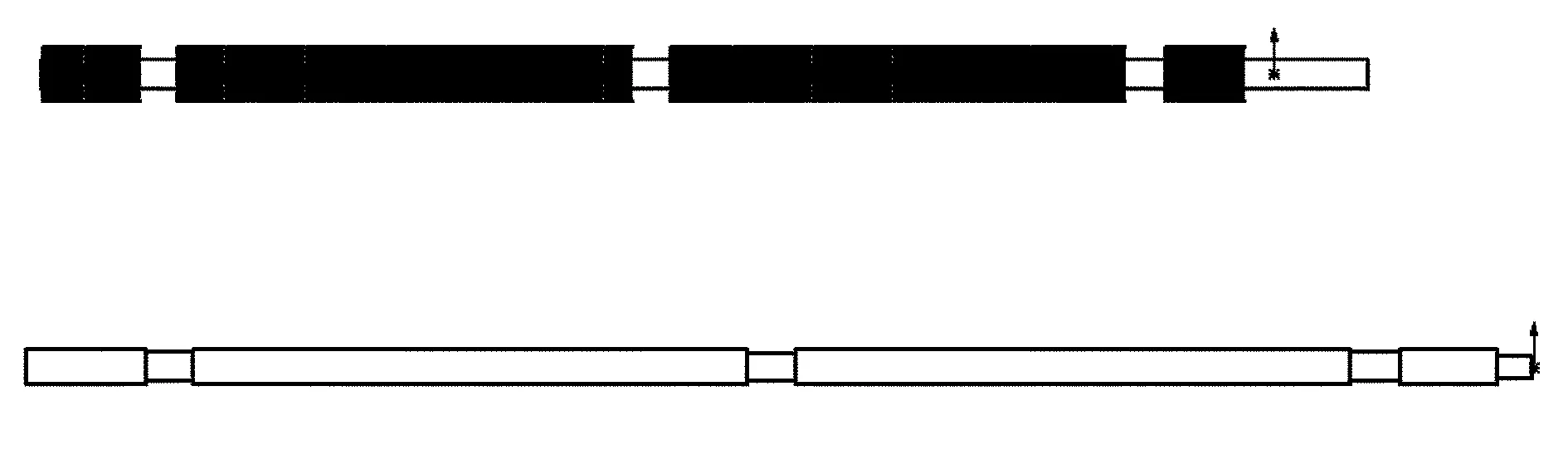
图5 清扫刷辊
2.2 网格划分
网格划分是建立有限元模型的一个重要环节,建立正确合理的网格模型对计算结果的精度影响较大,所以网格划分需要合适的方法[13]。刷辊模型采用的是四面体网格划分,使用的是patch conforming算法。网格划分完成后共有55 857个节点和30 855个单元,如图6所示。

图6 刷辊网格划分
2.3 约束的设置与求解
根据刷辊实际工作状态,在刷辊模型两端施加固定约束,位移边界条件是在轴承座及轴套位置施加圆柱面约束,约束轴向和径向的自由度,放开切向自由度。



图7 前6阶模态振型云图

阶数频率/Hz阶数频率/Hz120.377220.544321.470421.491542.004655.134
2.4 约束模态结果分析
随着模态顺序的增加,清洁刷辊的变形程度先减小后增大。由表2中的刷辊的前6个模态频率的数据可以看出:刷辊的第1和第2、第3和第4阶的频率是相似的,它们两两之间的振型变化也较为接近;前2阶的变形主要是某一端的弯曲变形,3阶和4阶主要变形发生在整个刷辊弯曲变形,第5阶时出现了大的圆周变形,第6阶时振动幅度最为明显,变形情况最为严重。
由于刷辊设计的工作转速在240/min以下,属于低速范围,转速对刷辊轴固有频率基本没有影响,因此旋转速度对刷辊临界速度的影响可以忽略。根据刷辊模态分析得到的固有频率,由式(5)计算刷辊的临界转速,即
n=60f
(5)
式中n—临界转速(r/min);
f—固有频率(Hz)。
刷辊轴模态第1阶临界转速n1=60×20.377=1 222.62r/min,该计算转速大于刷辊的最高工作转速240r/min;而前6阶固有频率在20.377~55.134之间,固有频率较高,其固有频率没有与清理装置其他零部件接近或耦合的频率。这表明,说明该主轴设计是合理的,能有效地避开共振区,刷辊不会发生共振[14]。
3 吸附杂质和刷辊刷毛特性分析
3.1 吸附杂质的物理特性
根据在石河子农八师136团采棉机工作现场实地跟踪调研,采棉机发动机外侧的防护罩网表面吸附的杂质主要有灰尘、棉絮、砂粒等,物理性质各不相同[15]。为了保证清扫装置设计的准确性,需要对轻扫杂质的物理特性进行分析。本文主要针对杂质中颗粒物的特性进行分析。
1)颗粒密度。表观密度是指材料质量与表观体积的比值,由于颗粒之间有空隙存在,因此影响杂质收集槽的设计。真密度指的是单位体积的颗粒质量,这影响到刷辊速度的确定。两个密度之间的关系可用公式表述为
ρε=(1-ε)ρ
(6)
式中ρε—颗粒的表观密度(kg/m3);
农业机械的保养要按照“防重于治、养重于修”的原则,切实执行技术保养规程,动力机械要按主燃油消耗量确定保养周期,按时、按号、按项、按技术要求进行保养,达到技术保养标准,确保机具处于完好的技术状态。
ε—空隙率;
ρ—颗粒的真密度(kg/m3)。
表3为常见颗粒物的表观密度和真密度。
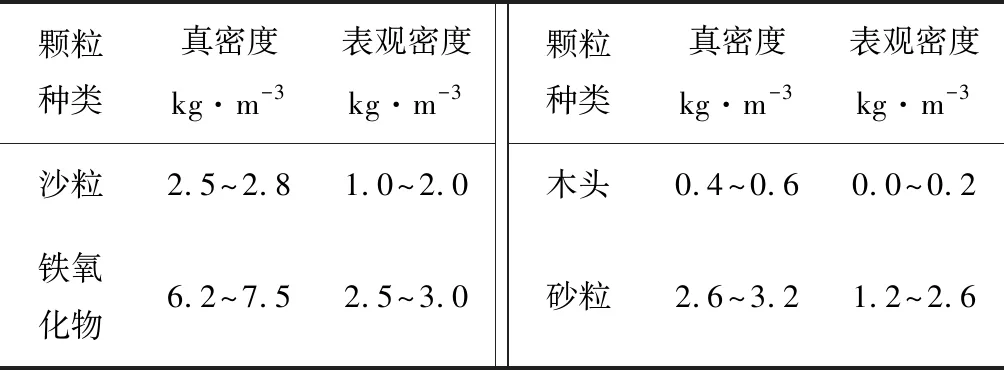
表3 常见颗粒物的表观密度和真密度
2)颗粒粒径。颗粒粒径是颗粒物的基本特性之一,其体积是判断颗粒物粗细的指标,而体积的大小归根结底为粒径的分析。由于道路上的颗粒物形状均不规则,所以分析粒径时应做出适当转化,在清扫装置的研究中主要转换方法为当量粒径。当量粒径采用等体积法(利用光散射法测定),将不规则颗粒物转化为体积相等的球体,该球体的直径即为当量粒径。当量粒径的计算公式为
(7)
式中V—颗粒的实际体积(m3);
d—当量粒径(m)。
3)颗粒球形度。研究垃圾颗粒物运动等情况时,都是把颗粒物假设成圆球体来进行研究,而实际上它们都是不规则的颗粒状,因此会导致计算结果与实际情况存在一定误差,会对刷辊的一些结构参数的确定有一定影响[16]。所以,引用球形度来作为矫正系数,表示颗粒与球体的接近程度。它们之间的关系可用公式表述为
κ=A/Ac
(8)
式中κ—颗粒球形度;
A—颗粒表面积(m2);
AC—当量球体表面积(m2)。
常见颗粒物的球形度如表4所示。
表4 常见颗粒物的球形度
根据以上颗粒物理特性及主要颗粒物占的百分比,为了使本研究更具有准确性,选择颗粒物中所占百分比较高的砂粒为分析对象。
3.2 刷辊刷毛的力学特性
刷毛的分布类型与所清扫的对象密切相关,因本文对象是砂粒颗粒物,所以刷辊类型选择清扫效果较好的圆柱形刷辊[17]。其刷毛沿圆柱体上分段密集分布,可使垃圾颗粒物在被刷毛分散弹起时又有种向刷辊中心聚拢的趋势,避免了二次扬尘,从而达到较好的清扫效果。圆柱体分段分布刷辊的清扫作业是刷毛与砂粒颗粒的非线性接触问题,刷毛的弯曲变形产生在横向截面XY平面和纵向截面YZ平面。图8为刷毛与砂粒颗粒横向截面内的接触示意图。其中,砂粒的法向接触力Fn和切向摩擦力Fτ使刷毛产生弯矩M,γ为刷丝与垂直方向的夹角,R为刷辊半径。由于刷丝为尼龙塑料,刚度小、弹性变形量大,当刷丝与砂粒刚发生点接触时,两者仍处于静平衡状态,接触点的弯矩为零。随着刷辊的转动,刷丝与砂粒间开始相互运动,两者间的接触点与其产生的弯矩零点也随之变化。

图 8 刷毛与砂粒横向截面接触
图9为刷毛在纵向截面的受力分析。为充分研究砂粒在纵向截面内的受力,将刷毛作用力F分解为纵向力FY和横向力FZ。FY将砂粒抛入刷辊使之绕刷辊做圆周运动,FZ将砂粒沿刷辊轴心线方向中心靠拢。当φ=0时,FZ=0,FZ则将砂粒只能垂直于刷辊做圆周运动,无法横向运动;当φ增大时,横向力FZ随之增大,但横向力FZ过大会导致刷辊转动横向滑移速度增大,加快刷毛的磨损。
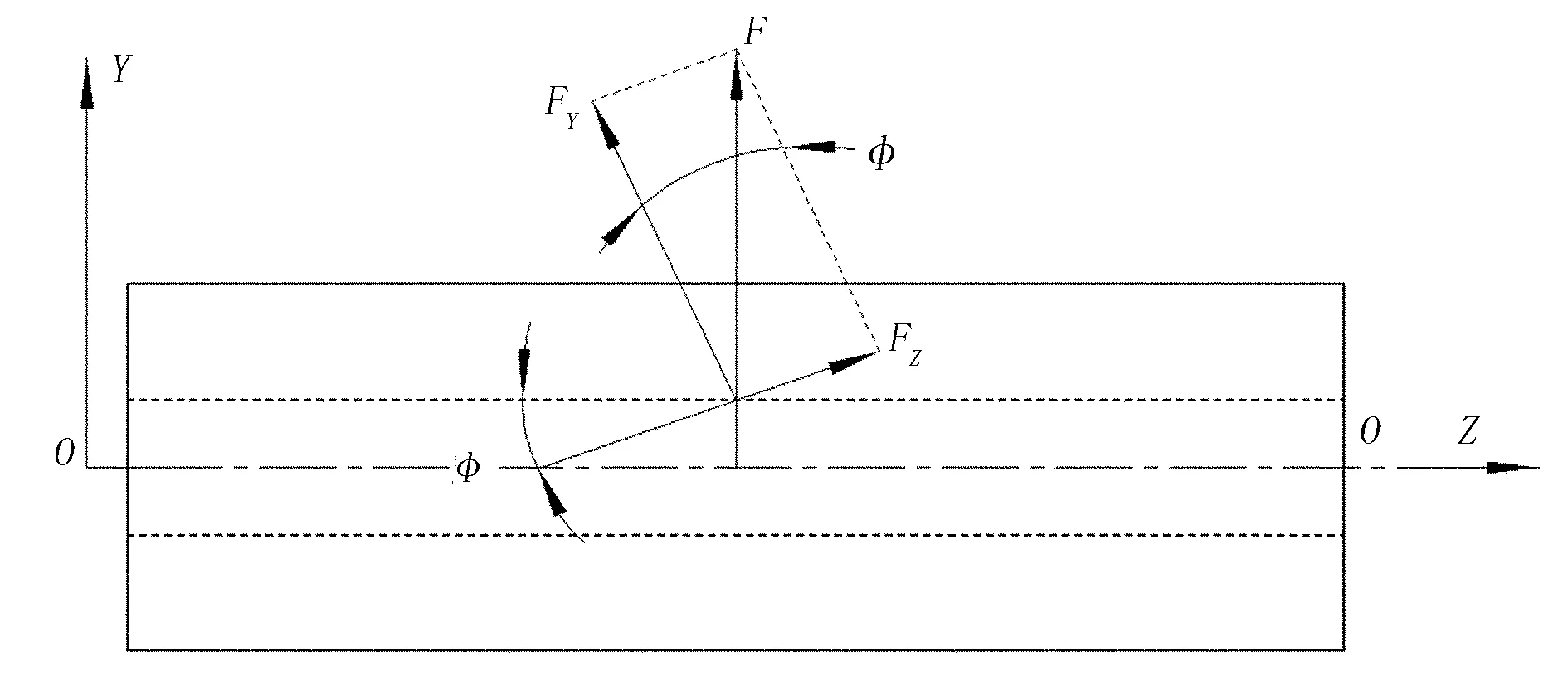
图9 刷毛在纵向截面的受力分析
4 试验验证
为检验该采棉机发动机防护罩网自动清理装置清扫效果,特在新疆生产建设兵团农八师136团和新疆新建现代农业工程开发有限公司机库进行试验对比。图10为兵团农八师136团调研图,图11为自动清理装置试验台,图12为人工扫把清扫罩网和清理装置清扫刷辊清扫效果对比情况。

图 10 兵团农八师136团调研现场
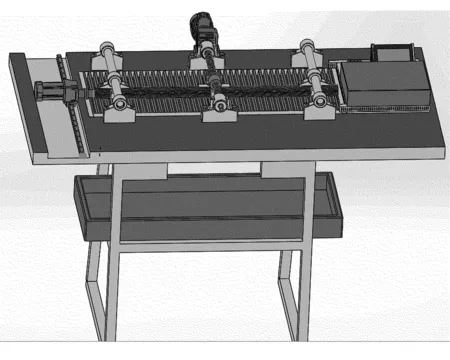
图11 清理装置试验台

图12 人工清扫和清理装置清扫刷辊清扫罩网对比图
试验选用的采棉机型号为迪尔9970,是新疆目前应用较为广泛的一种机型。其发动机防护罩网平面形状为长方形,长104.2cm,宽51.5cm。罩网上均匀分布许多小孔,罩网厚度3.44cm。随后,选同一个型号采棉机罩网,分别多次进行人工罩网清理,把清理装置清扫刷辊的清理效果和清理效率进行对比。试验完成之后 ,收集试验区域掉落在地上的杂质、罩网上未清理掉的杂质并称重,根据式(9)测得清理装置的清扫率,即
(9)
式中S—清理装置刷辊工作过程中的清扫率(%);
m1—试验区域内掉落在地上杂质的质量(kg);
m2—罩网上未清理掉的杂质质量(kg)。
试验结果如表5所示。

表5 试验结果
5 结论
1)设计了一种采棉机发动机防护罩网自动清理装置,可实现发动机防护罩网粘附杂质的自动清理作业,从而减小采棉机发动机故障率。
2)在SolidWorks软件中创建清理装置的三维模型,并导入ANSYS Workbench中对其刷辊进行模态分析,发现刷辊不会发生共振,满足使用要求。探讨分析了刷辊刷毛的清扫性能,主要包括垃圾颗粒的物理特性和刷毛的力学特性分析。
3)为检验清理装置清扫率等性能,对清理装置清扫刷辊清扫率和人工的清扫率进行试验对比分析,结果表明:人工清扫杂质清扫率在80%~85%之间,而清理装置刷辊工作过程中杂质清扫率大于 90% ,装置在工作过程中可靠性高,各项性能均满足要求[18]。
