日本小行星探测器隼鸟―2运行成果分析
2019-05-24王存恩北京空间科技信息研究所
王存恩(北京空间科技信息研究所)

用ONC-W1拍摄的着陆照片
1 引言
尽管日本宇宙航空研究开发机构(JAXA)研制的小行星探测器“隼鸟”(Hayabusa)出现了一系列故障,包括3个反作用飞轮中两个停转,化学推进系统燃料泄漏等,但管控人员利用1个还能正常工作的飞轮和离子发动机进行精心地管控和操作,使携带着从小行星糸川(Itokawa)上采集到的10mg样品的密封舱安全回到地面。这也使日本成为世界上首个掌握小行星取样返回地面的国家。
在“隼鸟”病入膏肓艰难之际,其后续计划几乎寿终正寝,携带着采集到的样品成功返回地面后,包括美国在内的多个国家和空间组织对其后续计划产生浓厚兴趣,表示愿意与其合作,甚至提出提供发射工具等优惠条件。JAXA因迟迟未能得到政府拨款也曾与美国等国家进行过接触,商讨合作,但日本政府为确保其在深空探测领域的国际领先地位,决定支持启动隼鸟-2计划,并于2014年12月3日发射。
隼鸟-2公用平台优化了控制系统设计:变“隼鸟”的3飞轮为隼鸟-2的4斜装飞轮;强化了智能化设计和故障预报能力等多项措施;改进了通信系统设计,配备了高增益Ka频段平面天线等,以实现通信高速化,做到图像和数据传输畅通,确保按管控要求精准地降升轨,各种观测和测量仪器准确对准观测对象进行观测。从布满岩石的龙宫小行星表面找到了可释放巡视器和着陆器的地段。有效载荷保留了弹子取样,小型跳跃式巡视器的携带数量从1个增加到3个,增加了向轨道上投放德国和法国提供的着陆器;增加了新的采样手段,利用携带的撞击装置(SCI)撞击小行星形成小行星坑并从中取样。
2 确定投放和着陆与取样点,以及投放目标标识器
隼鸟-2有效载荷平台上配备了光学导航相机(ONC-T)、近红外光谱仪(NIRS)、中红外摄像敏感器(TIR)、激光高度计(LIDAR)、分离监测相机(DCAM)等5种观测和测量仪器。利用搭载的这些观测和测量仪器对龙宫小行星进行几乎全方位的观测、摄像和测量。隼鸟-2于2018年6月27日飞抵距龙宫小行星20km的上空,以及之后的降轨观测告诉设计者:观测对象—龙宫小行星的实际情况要比当初预料的恶劣得多:不仅表面布满岩石,而且还有不少是直径为8m,乃至10m的岩石块,在龙宫上几乎很难找到一块地势较平坦、岩石直径小于60cm的可供探测器着陆的地段,宇宙航空研究开发机构不得不取消原定的两次演练在龙宫小行星表面着陆的计划,以及大幅度地推迟了释放跳跃式巡视器智慧女神-Ⅱ-1,2(MINERVE-Ⅱ-1,2)和着陆器“吉祥物”(MASCOT),隼鸟-2探测器在龙宫表面着陆和弹射弹子取样,以及在龙宫小行星上炸坑与取样的时间等。
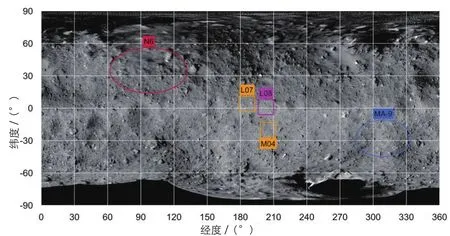
隼鸟―2及其所携带的跳跃式巡视器、着陆器的着陆地点和候补着陆点
值得庆幸的是,利用探测器上搭载的光学导航相机、近红外分光器、中红外摄像敏感器和激光高度计等观测和测量仪器在距龙宫小行星20km的上空和多次降轨所进行的一系列观测和测量,掌握了龙宫的形状、直径和体积,获取了龙宫小行星上的重力参数,确认了龙宫表面覆盖物的密度等;判别龙宫小行星表面基本(50%以上)都是内部有空隙的岩块;通过对其考察、分析和重力测量,基本可判断龙宫小行星表面的形成与进化过程,确定其自转周期,并认定龙宫小行星是一个对称性强、高速旋转的陀螺形小天体,而且因离心力导致变形的可能性很大;还认定即便龙宫小行星以当前2倍的速度自转,也不会使其表面岩石等呈倾斜分布状态;光学导航相机的分光观测数据还证明:龙宫小行星若抵达赤道分界线处,即便是在受宇宙风化影响小的情况下,各种新鲜物质裸露的概率也很大;还判断出位于赤道分界线处的L08区域是龙宫小行星上最适于取样的地点。
确定投放和着陆与取样点
2018年8月17日,召开了有决策者、参研单位技术人员参加的“确定投放巡视器、着陆器和探测器着陆点协商会”。对光学导航相机等提供的观测图像和测得的重力数据,以及分析结果,从位于低纬度和中纬度范围内选出的13个候补投放和着陆点中筛选出7个供投放巡视器和着陆器,9个供隼鸟-2着陆的着陆点和候选着陆点;再继续分析比对,最后确定了执行投放和着陆任务的时间,投放3个跳跃式巡视器MINERVE-Ⅱ和小型着陆器MASCOT的地点,以及探测器的着陆点、候选着陆地点。
投放3个跳跃式巡视器MINERVE-Ⅱ-1A,1B和MINERVE-Ⅱ-2时间:2018年9月21日;投放地点:N6。
投放着陆器MASCOT时间:2018年10月3日;投放地点:MA9。
隼鸟-2首次着陆时间:2019年2月22日;着陆点:L08;候补着陆点:L07、M4。
隼鸟-2第二次着陆时间:2019年5月下旬;引爆爆炸装置时间:4月5日;爆炸点和着陆点:L12;候补着陆点:S01。
参会者认为:在N6点投放巡视器,MA9处投放着陆器,隼鸟-2探测器在L08和L12着陆,不仅有利于进一步确认龙宫当前的形状,还能通过对采集到的样品进行分析确认龙宫表面主要组成物质碳素的强度等,对研究太阳系的起源、进化和生命的起源有重要作用。
探测器上携带的巡视器、着陆器能否准确地投放到指定地点,探测器能否在指定的地点安全着陆,是能否完成一系列任务的关键,而要顺利地将巡视器、着陆器投放到指定地点,探测器安全地在着陆点实现着陆,必须提前确定好投放地点和着陆点,对布满岩石的龙宫小行星尤其重要。
投放目标标识器
探测器能否把巡视器、着陆器投放到选定的投放点,不仅关系到是否能有效地对龙宫小行星进行详细地观测和测量,还决定探测器能否在选定的着陆点实现着陆和采集到弹子弹射起的样品,以及探测器上所携带的撞击装置爆炸后形成的锥形铜金属块能否撞击到小行星上选定的撞击点,并形成小行星坑,乃至能否实现探测器在选定的着陆点着陆,以及完成对龙宫小行星内部取样。因此,JAXA决定像“隼鸟”探测器一样,预先向在小行星表面选定的各个点投放目标标识器,由其引导探测器把巡视器和着陆器投放到选定的地点,探测器在指定地点着陆,并按设计要求弹射出弹子和采集到溅射起的碎片,以及确保爆炸后形成的金属块撞击到选定点,并指引探测器在龙宫小行星上的小行星坑区内着陆和取样。
目标标识器是个直径为10cm、表面贴满发光反射膜的球形体,预先投放到小行星表面选定点,执行投放和着陆任务前,探测器打开闪光灯照射它就会成为一个小灯塔,引导探测器将巡视器和着陆器投放到它指引的地点,帮助探测器在选定地点安全着陆。
之前,“隼鸟”探测器只携带3个目标标识器,而隼鸟-2携带了5个。在探测器投放巡视器和着陆器,以及探测器在龙宫小行星上着陆前,即2018年10月25日,隼鸟-2探测器向小行星表面投放演练着陆用的两个目标标识器。
10月24日,隼鸟-2探测器就开始做投放准备工作。12:00,探测器从距龙宫小行星20km的上空以40cm/s的速度降轨,大约23:40,到达距龙宫小行星4500km的上空;然后,放慢下降速度为10cm/s;25日11:37,探测器就在距龙宫小行星仅12m前的1min,再次确认选定的演练着陆区域没有大于60cm的岩石,不会对探测器造成损害,则指令探测器继续下降到距龙宫小行星表面仅12m处,并按规定将两个目标标识器(TM-A和B)投放到龙宫小行星表面L08-E1区域,它实际上引导了隼鸟-2在L08-E1区域内安全着陆。

目标标识器
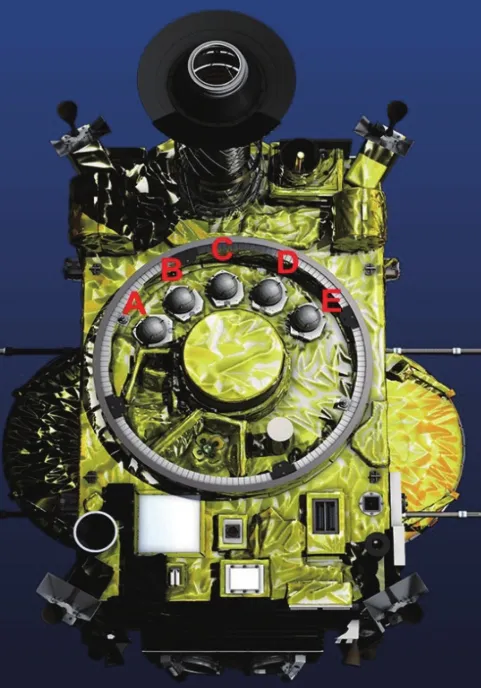
标识器的主要配置
3 探测计划拟完成的核心任务
小行星探测器隼鸟-2原计划在龙宫小行星表面着陆4次:前两次是演练着陆,同时确认最终着陆点,但因龙宫小行星布满岩石,从安全角度考虑取消了演练。因此,隼鸟-2探测器要完成的只有5项核心任务。
通过观测与测量获取与小行星相关的信息,并提供确定投放和着陆点等依据
隼鸟-2探测器利用搭载的光学导航相机、近红外分光器、中红外摄像敏感器、激光高度计等4种观测和测量仪器对龙宫小行星进行详细地观测,获取用于龙宫小行星表面矿物质成分调查、记录龙宫表面温度变化,以及测得的龙宫表面磁场的照片和数据信息,还为管控人员提供选择投放和着陆点的信息,对此第2章做了阐述;此外,分离监控摄像敏感器监控了撞击装置与探测器分离,以及引爆撞击装置形成锥形铜金属块及其快速撞击龙宫小行星上选定的撞击点和形成小行星坑情况。
投放跳跃式巡视器
隼鸟-2探测器上携带了3个跳跃式巡视器,其中两个巡视器MINERVE-Ⅱ-1A和1B是由JAXA研制的,另一个MINERVE-Ⅱ-2巡视器是由东北大学等5所大学研制的。
(1)MINERVE―Ⅱ―1概况
MINERVE-Ⅱ-1A和1B这两个巡视器在“隼鸟”上搭载的MINERVE基础上做了必要改进,是一种新型跳跃式巡视器。MINERVE巡视器没有在小行星糸川表面着陆的原因是,没有把下达投放指令与实际执行指令间的延迟(16s)计算在内。隼鸟-2采取了杜绝这种低级人为差错的办法。
巡视器MINERVE-Ⅱ-1A和1B,两者无论尺寸(直径为1.8cm×7cm)、质量(1.25kg),还是行走方式都完全相同;两个巡视器再加上分离机构,体积则为 22.5cm×22.5cm×20.5cm,质量为3.3kg。巡视器上都配置广角和立体相机、温度传感器、发光二极管、蓄电池、加速度计和陀螺。设计者进行智能化设计,以确保巡视器能适应苛刻的龙宫表面环境,以及供电等限制,完全依靠自主判断和高水平的自适应控制就能确保两个巡视器在酷热的中午和气温极低的夜晚自动进入休眠状态,在最适于工作的清晨和傍晚利用自身携带的两台DC电机和蓄电池向各种仪器供电,完成了观测、测量和拍照等任务;此外,还通过探测器上搭载的中继器(OME-E)完成了与地面进行必要的通信,以32kbit/s的速度向地面传输了获取的数据和拍摄的图像等。
(2)投放地点和时间
在确定着陆点的协商会上,设计者阐述了设计时就提出的4个必要条件:
1)远离选定的隼鸟-2着陆点和候补着陆点;
2)与MASCOT不能在同一着陆区域着陆;
3)MINERVE-Ⅱ不能在高温地带,以及阴影区非常小的位置与探测器分离,应在距赤道100m的北半球上空与探测器分离,才能确保着陆后南北方向有一宽阔的移动和观测地带,否则若在南半球与探测器分离,要将巡视器投放到要求的地点,探测器很可能要下降到距龙宫小于30m之处,这样,轨道控制精度稍有偏差,太阳电池翼等就可能受损;
4)必须确保MINERVE-Ⅱ与地球站通信畅通。
协商会决定满足设计时就提出的这4个条件,决定将MINERVE-Ⅱ投放到N6点。着陆时间为2018年9月22日。
(3)MINERVE―Ⅱ―1安全投放到预定的着陆点,完美完成既定任务
经过一系列准备,2018年9月20日,进入准备投放MINERVE-Ⅱ-1模式:14:10开始,隼鸟-2开始投放降轨:以40cm/s的速度从距龙宫20km处降轨,9月21日00:30,降至距龙宫表面5km处;9月21日00:30开始再次放慢以10cm/s的速度下降;21日12:40,探测器距龙宫表面仅250m,这时探测器观测和控制等功能正常;在13:00~13:30探测器降至距龙宫小行星表面仅60m时,MINERVE-Ⅱ-1与探测器分离,MINERVE-II-1A和1B降落到预先选定的着陆点N6(纬度:16°~56°,黄经60°~35°)处;接着,探测器开始以50cm/s的速度升轨,并慢慢加速,于9月22日15:00回到距龙宫小行星20km处。
投放到龙宫表面的MINERVE-Ⅱ-1A和1B利用自身携带的通信仪器与探测器进行了联系;接着,用各自携带的电机,驱动巡视器一边跳跃,一边用携带的装置进行观测和测量,在17~18min后,即9月21日13:50左右,MINERVE-Ⅱ-1A和1B先后传回了图像信息,证明两个巡视器都安全着陆。利用智能控制技术成功地控制MINERVE-Ⅱ-1A和1B在龙宫小行星表面工作超过了10个小行星日(原计划仅1个小行星日),且做到在龙宫小行星清晨和傍晚最适于工作时段进行跳跃,在酷热的中午和气温极低的夜晚这样不适于工作时段自动进入休眠状态,并避开直径60cm岩石块,总跳跃距离为200m。获取所需观测和测量信息,并用其携带的通信仪器通过隼鸟-2探测器上的中继器以32kbit/s的速度把获取的图像和数信息等传送给了地面接收系统。

两个小型跳跃式巡视器
(4) INERVE―Ⅱ―2未能按计划投放
MINERVE-Ⅱ-2是东北大学等5所大学研制的直径为15cm,高14.5cm,质量为1.6kg的跳跃式巡视器,配备有相机、温度传感器、加速度计和用于控制、计测跳跃巡视器跳跃距离等的装置。
探测器发射入轨后曾进行3次检测MINERVE-Ⅱ-2,结果显示其状况正常,功能尚可,与探测隼鸟-2通信联系也无碍,但在即将投放前的检测却发现执行数据处理任务用的计算机处于一种未正确初始化状态,这样,既无法掌握MINERVE-Ⅱ-2本身状态,也无法对相机等载荷仪器进行控制。因此,决定放弃与MINERVE-Ⅱ-1一起投放MINERVE-Ⅱ-2的计划。
探测问题可能出现在组装时布线缠绕,或电气环境变化,修复几率很低,向龙宫小行星表面投放的可能性变得很小。不过,MINERVE-Ⅱ-2的跳跃机构(山形大学研制)是一种没有配备电源、靠金属构体内温度变化所致的热胀冷缩原理引起伸缩来驱动巡视器跳跃的机构。东北大学的吉田和哉先生表示,正寻找出现的故障不会影响跳跃和观测等功能的佐证,如果能够确认,希望能在隼鸟-2完成各项主要任务后的2019年7月之前将其投放到龙宫表面,完成部分科学观测任务。
投放着陆器
小型着陆器MASCOT是德国航空航天研究院(DLR)和法国国立航天研究中心(CNES)共同研制,搭载有广角摄像机、热辐射计、磁强计和分光显微镜等,质量为10kg、车体为0.275m×0.290m×0.1956m,是一个以跳跃式前进的着陆器。
(1)投放地点和时间
在确定着陆点的协商会上,设计者也阐述了设计时就提出的4个必要条件:
1)必须选择在北半球,并与隼鸟-2演练触地点不在同一地点处投放;
2)与MINERVE-Ⅱ不在同一着陆点着陆;
3)着陆点必须在光学导航相机能够观测到的区域;
4)必须投放到MASCOT与地球站顺畅通信地段。
结合广角光学导航相机提供的图像信息和重力测量数据,以及龙宫小行星表面岩石分布等状况,协商会确定小型着陆器投放到MA9(纬度:0°~―8°,黄经300°~320°)区段,投放时间定为2018年10月3日。
(2)成功投放新型着陆器
2018年10月2日11:50,隼鸟-2从距龙宫小行星表面20km处开始降轨,到10月3日10:55,分别放慢速度,以40cm/s、10cm/s和3cm/s这3种速度降轨,到达距龙宫表面仅51m处,开始投放MASCOT。10月3日10:57,MASCOT成功地与探测器进行了通信;接着,连续发回了用广角导航相机拍摄的3张龙宫小行星的照片,确认MASCOT成功地在选定的着陆点MA9处安全着陆。10月3日11:00,隼鸟-2探测器开始升轨,10月8日15:00回到距龙宫小行星表面20km处。
在10月14-15日,MASCOT靠自身携带的电机驱动着陆器以跳跃方式前进,接着,还用自身配备的加砝码的偏心臂梁所产生的反作用力矩控制MASCOT完成反转跳跃,共工作的时间达17h,避开直径大于60cm岩石,在龙宫小行星表面跳跃行走的总距离为200m。利用其携带的广角相机连续地拍摄了龙宫小行星表面的清晰照片;用分光显微镜对龙宫表面矿物质成分进行了观测分析;用热辐射计测量并记录下了龙宫表面温度变化;用磁强计完成了对龙宫表面的磁场测量等。
首次在龙宫小行星表面着陆与弹射弹子取样
隼鸟-2探测器在龙宫小行星表面的首次着陆的时间为2019年2月22日。首先,是要完成在龙宫小行星上着陆,接着是用弹射出的弹子撞击龙宫小行星,并从其表面取样。
(1)探测器着陆
原计划2018年10月下旬就在龙宫小行星表面着陆,执行取样任务。然而,飞抵距龙宫小行星表面20km之前,设计者认为,直径为900m的龙宫小行星表面即便有岩石,也不可能找不到一块平坦的、可供选定着陆的地带,实际情况恰恰相反,通过在距龙宫小行星表面20km,以及距龙宫小行星表面更近距离的反复观测才清楚:要在龙宫小行星上寻觅到一块直径为20~30m、岩石直径小于60cm的较平坦地带实在难。因此,经从距龙宫小行星不同高度观测,决定把首次取样推迟至2019年2月22日。
着陆点L08是经研究确定的一个半径为3m的区域;候补着陆点定为L07、M4。
执行着陆任务前,再次提高了绘制的小行星模型的精度,强化探测器的自主控制能力,绘制大块岩石集聚地,确定预报和自主避开大块岩石的方法,并利用激光高度计实时地测量,确认并实时地通报探测器与龙宫小行星表面的距离,控制探测器以最佳姿态迅速地捕获已经闪光灯照射过的目标标识器,由其引导完成在幅宽仅6m的L08-E1区域内着陆。
2019年2月21日7:00,确认实现小行星模型高精度化对策,强化自主控制能力,确认捕获目标标识器的方法的可行性;7:15,根据光学导航相机提供的龙宫小行星图像和轨道高度信息等,3次审核隼鸟-2在轨状况,确认可以降轨;13:32管控中心下达“降轨”指令,13:51,探测器从距龙宫小行星表面20km处以90cm/s的速度降轨(管控中心给出的降轨速度为40cm/s,但演练结果确认以90cm/s下降没有任何问题,所以实际上是以这一速度下降);17:52,探测器到达距龙宫小行星表面6km处:18:52,再次确认是否可继续下降。答案是肯定的:继续下降。
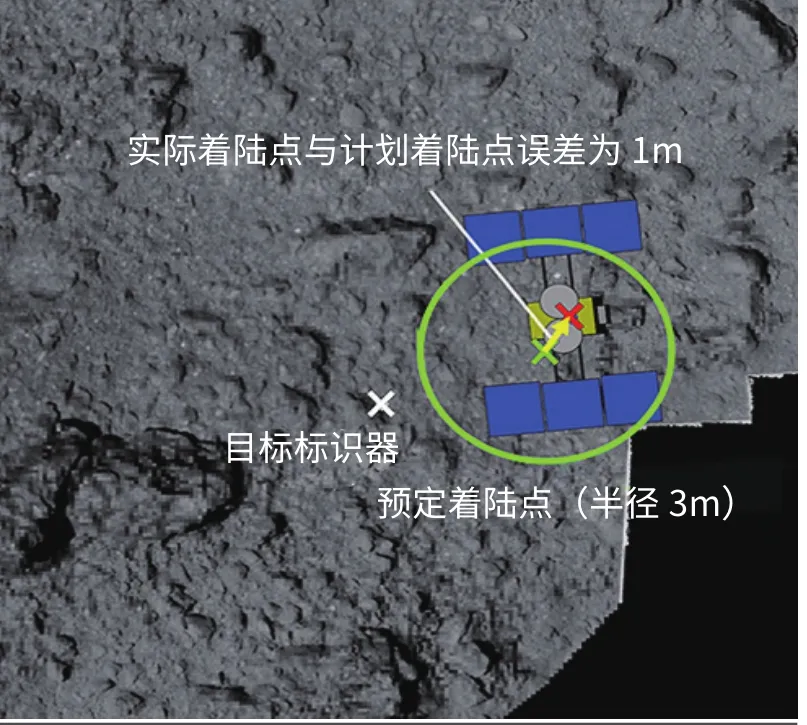
2月22日6:02,探测器飞抵距龙宫小行星表面500m处,开始转换到以搭载计算机计算结果为基础的自主下降模式;6:31,探测器进入了在龙宫小行星表面着陆前的准备阶段;7:26,将用高增益天线通信切换到用低增益天线通信方式,接收低增益天线用频率的电波信号,依靠多普勒效应监控探测器的运行速度(这时探测器距龙宫小行星表面仅45m);7:29,探测器进入自主下降过程,各种监测仪器按地面操作人员19min前所发出的微调指令,一边监视探测器降轨,一边做应急准备,一边捕获目标标识器,同时也做好了采取应急措施的准备:一旦出现异常就立即升轨;7:35,继续用激光高度计等测量设备测量探测器与龙宫小行星的距离;7:38,探测器到达距龙宫小行星表8.5m处(处于一种悬浮状态),这时探测器姿态处于一种略向着陆点方向倾斜状态,其实这是设计者和控制者有意所为,这样可使探测器尾部翘起,可减少乃至避免尾部搭载的离子发动机等与龙宫小行星表面岩石接触受损,此外,还可使目标标识器更早地进入观测仪器的视野,便于探测器向着陆处移动;7:46,探测器姿态稳定,降落到龙宫小行星表面;7:48,根据低增益天线的多普勒数据确认了探测器已完成以“一触即离”方式在龙宫小行星表面选定的半径为3m的L08-E1区域高精度着陆;8:09,完成由低增益到高增益通信用天线的切换,探测器恢复正常接收遥测数据,确认探测器工作正常。
2月23日12:19,隼鸟-2探测器回到了距龙宫小行星表面20km处。
(2)弹子弹射采样
隼鸟-2探测器于2月22日7:48,以“一触即离”方式完成了在龙宫小行星表面选定的第一着陆点L08-E1区域着陆,着陆精准度优于1m;8:09接收到探测器发送的多组遥测数据都证明隼鸟-2安全地飞离龙宫小行星。
这时,进入利用弹子弹射取样阶段。
弹子弹射装置是由弹子、火工品和控弹器等组成,虽然弹子的质量仅3.5g,要比“隼鸟”上搭载的弹子质量轻了1.5g,但由于变成圆锥形,且密度大,因此弹射出以后比“隼鸟”上轻了1.5g的弹子的冲击力还要强。
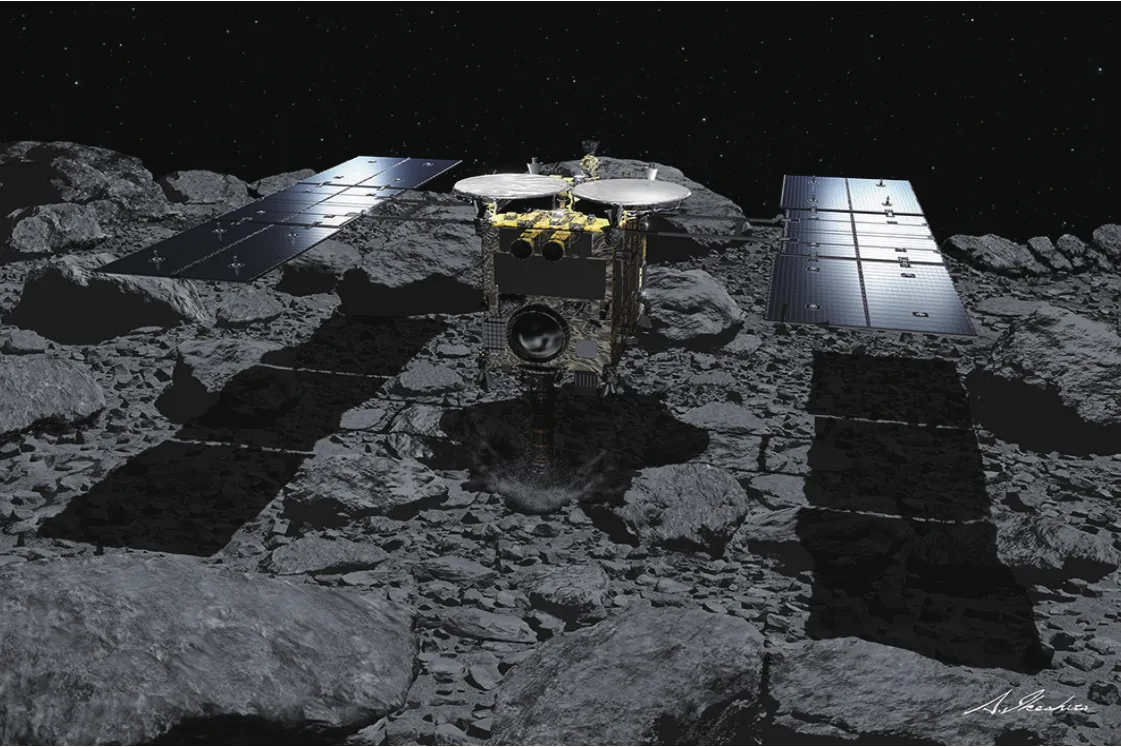
2月22日8:42,弹子弹射装置在1/1000个大气压下,以300m/s的速度飞快地弹射出,撞击到了小行星表面L08-E1。遥测数据显示:弹子弹射装置周围的温度上升,探测器上升图像数据确认弹子弹射装置已将弹子弹射出,并撞击到了龙宫小行星表面,采样装置以被动方式采集到了不少于3g从龙宫小行星表面弹射起的飞溅碎片和粒子。10:40,呈张开状态的采样装置的采集器喇叭口折回,封存;11:20,驱动采样装置的旋转机构,关闭了采样器A口。11:39,判断采集到的龙宫表面样品已装入采样器内。
隼鸟―2第一次着陆位置图

“隼鸟”用弹子投射器

用采样装置采集弹子弹射起的样品

第一次撞击后拍摄到的照片
引爆撞击装置炸出小行星坑与第二次着陆,以及确定从小行星内取样时间
原定2019年2月用撞击装置撞击龙宫小行星表面后形成小行星坑,接着执行从其内部取样任务,由于前面提到的原因,执行这一任务的时间推迟到2019年4月初。
(1)取样时间与地点
确定撞击装置与探测器分离时间为4月4日,选定的撞击点,即隼鸟-2的第二个着陆与取样点为L12;紧接着,引爆撞击装置生成坚硬、带尖头的铜金属块撞击龙宫小行星表面,并形成小行星坑,然后从其内部取样。选择着陆炸坑取样地点的要求是:要在第一次着陆点(L08)取样附近,且第二次着陆取样点与第一次着陆取样点的地质结构必须相类似,周围应是较平坦又易于取样地带,如地极地沟和东半球地带,但不允许与第一次着陆点相同。最后确定为L12(纬度为6.00°、经度为303.00°)处,候补着陆点为S01处。
(2)撞击装置
撞击装置是由日本工机白河制造所研制的直径为30mm、质量为14kg,内部装满约9.5kg炸药的半球型圆锥结构体。隼鸟-2进入龙宫小行星阴影区后,撞击装置与探测器分离,其中以纯铜为壳体,厚度为5mm、质量为2kg的圆锥形构架在爆炸后在1/1000s的时间内形成一个坚硬的锥形铜金属块,并以2km/s的速度撞击在龙宫小行星上选定的目标点(L12),形成一个直径约为10m的小行星坑。
(3)撞击装置与探测器分离与撞击小行星坑
2019年4月3日7:30,控制小行星探测器隼鸟-2的运行轨道,使之成功地进入了龙宫小行星的阴影区、运行轨道高度为距龙宫小行星20km处,各跟踪台站也都进入跟踪准备阶段,多次确认是否可降轨;4月4日13:17,探测器以40cm/s的速度开始降轨;4日18:06,下降至距龙宫小行星表面13km处;4日23:37,探测器抵达距龙宫小行星3km处,进一步放慢速度,即开始以10cm/s的速度继续降轨。
4月5日11:01,探测器飞抵距龙宫小行星仅500m(龙宫小行星仍处于龙宫小行星的阴影区内),到撞击装置与探测器分离前一直处于这种悬浮状态。
4月5日11:13,撞击装置与探测器分离;5日11:14,监控相机DCAM3与探测器分离;然后,隼鸟-2升轨,转移到龙宫小行星后方的安全地带;11:36,引爆撞击装置,分离监控相机拍摄到了撞击装置在极短时间内(1/1000s)形成的坚硬锥形铜金属块,以2km/s的速度撞击龙宫小行星表面所选定的目标点(L12),形成小行星坑,以及炸出坑后溅射起岩石碎片和颗粒的情景;5日21:52,结束撞击龙宫小行星及其在龙宫小行星上生成小行星坑的作业。
按计划,隼鸟-2将于5月下旬再次飞抵龙宫小行星上空,瞄准被炸出的小行星坑,以“一触即离”方式完成着陆,并完成采集小行星内部不少于10g样品的作业。
隼鸟-2撞击龙宫小行星及形成的小行星坑
4 结束语
隼鸟-2已完成了拟定的基本任务,只剩下5月底执行采集样品这项任务,笔者认为只要管控组认真总结“隼鸟”在小行星糸川上和隼鸟-2在龙宫上用弹子弹射取样的经验,完成在龙宫小行星上着陆,并从其内部采集不少于10g样品的把握很大。接着,就是如何控制返回密封舱与探测器分离,使之顺利再入大气层完成回收任务了。
至于第二次用弹子弹射法进行再次取样,由于2月22日通过弹子弹射方式已经采集到不少于3g 的样品,加上探测器底部用来对小行星进行观测的受光量有下降现象,为确保第二次着陆取样,很可能不再进行;剩下的则是投放由5所大学研制的跳跃式巡视器了,其故障很难排除,如无法排除很可能放弃投放。
在科学方面,隼鸟-2对研究太阳系起源、进化和生命的起源有重要作用;在技术方面,有利于日本继续保持在深空探测技术领域的领先地位;在战略方面,有助于日本拓展在防卫领域的应用潜力;在社会方面,可培养深空探测技术人才,推进日本火星卫星探测着陆计划,并为日本加入构建国际月球站创造机会,增加讨价还价的砝码。
