不确定航迹自适应预测模型
2019-05-24崔亚奇熊伟何友
崔亚奇,熊伟,何友
海军航空大学 信息融合研究所,烟台 264001
航迹预测主要是基于目标历史运动航迹,对目标未来可能的位置进行预测,是当前进行正确判断和科学决策的主要依据。作为一项极为关键的基础支撑技术,航迹预测在民用和军事领域具有广阔的应用场景[1-3]。例如,在民用领域,对船舶的航迹趋势做出正确的判断,就可以采取相应的措施,趋利避害,使目标船舶和附近其他船舶处于安全的运行环境中,对民航飞机航迹进行精确的预测,就可以提高空中交通管制的效率,提供及时、最优的冲突解决方案,提高空域容量。在军事领域,目标航迹预测更是贯穿目标识别、目标跟踪、目标打击等作战全环节当中,譬如可用于异常航迹检测,识别不明目标;可用于雷达目标跟踪,提高目标跟踪连续性;可以用于导弹对移动目标火力打击,提高导弹命中概率等。
鉴于目标航迹预测技术重要作用和广泛需求,当前对目标航迹预测技术进行了多方面、多角度的研究尝试,取得了大量研究成果。根据是否需要对目标运动模型进行建模,现有航迹预测技术可分为无模和有模两大类。其中,无模技术把航迹预测问题单纯地视为时间序列预测问题,忽略问题领域知识,直接选取匹配的方法进行预测,譬如基于灰色模型的航迹预测方法[4],基于BP神经网络的航迹预测方法[5-6]等。此类方法具有前提假设少、模型简单、所需样本数据少的优点,但对所采用时序方法的合理性,与实际问题的契合性,缺乏必要理论论证。同时由于所采用时序模型较为简单、能力有限,现有无模类方法还存在适用范围窄、泛化能力弱、预测精度低的问题。
有模技术则基于假定的目标运动模型,采用统计估计理论,对航迹进行预测。根据假定的目标运动模型数量,有模技术还可进一步划分为单模[7-9]和多模两大类[10-13]。单模技术基于目标仅做一种模式运动的假设进行航迹预测,常见的目标运动模型有匀速、常加速、协同转弯、Singer、当前统计和Jerk等模型,相匹配的统计估计方法有卡尔曼滤波[7]、扩展卡尔曼滤波[8]、粒子滤波[9]等。多模技术[10-13]则假定目标依据一定概率,按照模型集里面的有限运动模式进行交替运动,其假定的模型集一般比较小,主要包括匀速、常加速、协同转弯等3种模型,相匹配的统计估计方法有交互多模型和高斯和等。有模技术具有理论严谨,性能有保证,实现简单的优点,但由于实际目标运动模型未知多样,此类方法存在先验假设过多,前提条件严苛的问题,进而导致其适用范围有限、通用性差,实际运用效果时好时坏。虽然多模方法一定程度上弱化了目标模型假设,但与实际情况仍存在较大差距,尚没有完全有效解决问题。
综上所述,现有航迹预测技术存在的问题可归纳如下:
1) 无模技术假设简单、通用性强,但其合理性目前缺乏理论分析支持,同时现有方法采用的时序模型较为简单、能力有限,存在适用范围窄、泛化能力弱、预测精度低的问题。
2) 有模技术理论严谨、性能有保证、实现简单,但存在先验假设过多、前提条件严苛的问题,实际运用效果时好时坏、通用性差。
针对上述问题,研究提出不确定航迹自适应预测模型。该模型具有无模与有模两类技术的优点与长处,具备理论严谨、先验假设少、适用范围广、通用性强的优点,无需对目标可能的运动模型进行提前明确,适用于目标运动具有规律性、但具体运动模式不确定的航迹预测问题,可完全有效解决航迹预测问题。
本文首先通过理论推导,构建不确定航迹自适应预测基本理论框架,然后基于神经网络,建立不确定航迹自适应预测(Uncertain Track Adaptive Forecast, UTAF)模型,并生成典型的实现方法,最后通过仿真与实测数据,对其有效性进行验证。
1 模型研究
首先对需要解决的问题进行描述建模,然后根据实际情况,进行合理必要假设。基于此,利用全概率公式,构建问题的基本解决框架,最后采用神经网络设计出有效的模型。
1.1 问题建模
航迹预测主要是由前多个时刻的位置,预测下一时刻的位置。从概率的角度看,航迹预测就是要求取p(yt+1|{x1,x2,…,xt}),并进行最大化,以得到
(1)

1.2 基本假设
受目标自身性能、或操纵人员习惯、以及其他外部条件影响限制,目标在运动过程中存在一定的规律,并不是毫无章法、随机运动的,譬如受目标自身性能限制,目标的最大加速度、最小转弯半径、巡航速度基本上是确定的,受操纵人员习惯和其他外部条件影响,目标何时加速、何时减速、何时转弯、加速方式、减速方式等,也有特定规律。因此,目标运动是有模式的,但什么类型的目标,具有什么样的运动模式,相应运动模式的多少、规模以及具体内容,以及目标在何时以何种模式运动,对预测者来说,是不确定的,也是难以确定的。
假设目标以一定模式c运动,并且目标下一时刻的位置完全由当前的模式c确定,即
p(y|c,{x1,x2,…,xt})=p(y|c)
(2)
式中:c为实数向量,包含所有与预测下一时刻相关的信息,由c构成的空间{c}为目标运动模式空间,表示目标所有可能的运动模式。
1.3 基本框架
对于条件概率p(y|{x1,x2,…,xt}),由全概率公式,可得
p(y|{x1,x2,…,xt})=
p(c|{x1,x2,…,xt})
(3)
基于假设,根据式(2),可进一步得到
p(y|{x1,x2,…,xt})=
(4)
(5)

(6)
I({x1,x2,…,xt})
(7)
(8)
式中:I-step主要是根据前多个时刻的位置提取目标可能的模式信息,而E-step则根据模式(8)信息,对目标可能的预测位置进行估计生成。
1.4 模型设计
如果能根据I-step和E-step过程的信息处理特点,直接设计出既具有相应功能特征,又不涉及目标具体运动模式,同时还能方便求解的一般表示,则可构建UTAF模型,如图1所示。
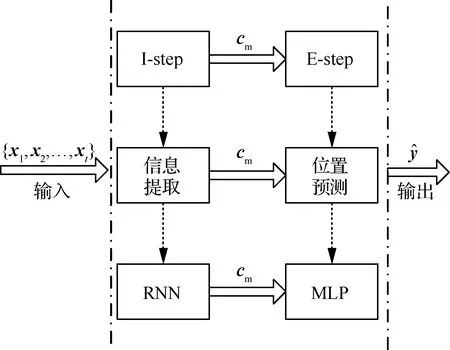
图1 不确定航迹预测思维图Fig.1 Thinking map of uncertain track forecast
鉴于神经网络强大的信息提取、模式识别和函数逼近能力,考虑采用神经网络结构对I-step和E-step进行一般表示:
1) 循环神经网络(Recurrent Neural Network, RNN)是专门处理变长序列数据的网络结构[14-16],具有强大的信息记忆、信息提取、信息表示以及模式识别能力,因此可采用RNN对I- step进行一般表示:
hi=f(xi,hi-1)
(9)
c=q({h1,h2,…,ht})
(10)
2) 多层神经网络(Multi-Layer Perceptron, MLP)具有很强的函数逼近能力,两层MLP即可逼近任意一个连续函数[17-21],因此可采用MLP对E-step进行一般表示:

(11)
因此,用RNN表示I-step,用MLP表示E-step,串联起来,即为UTAF模型,如图2所示。
与现有航迹预测模型方法相比,UTAF模型具有如下显著特点:
1) 几乎不存在任何先验假设,唯一要求是目标运动有模式,即目标运动事件本身是可预测的,这与实际情况是相符的。
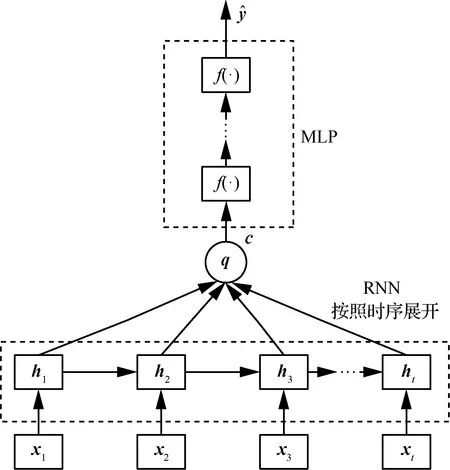
图2 UTAF模型Fig.2 UTAF model
2) 推导严谨,有理论支撑。
3) 采用神经网络结构,模型表达能力强,涵盖维度高,泛化能力强。
4) 能利用大量历史观测数据进行模型训练,符合当前大数据、人工智能技术发展潮流。
2 典型方法
基于已建立的通用模型,采用具体RNN和MLP结构,通过参数寻优,构建生成典型不确定航迹自适应预测方法(Basic Uncertain Track Adaptive Forecast Method, Basic-UTAFM)。
首先,采用典型RNN结构,实现I-step。典型RNN结构包括Simple-RNN,LSTM(Long Short-Term Memory)以及GRU(Gated Recurrent Unit)等不同网络结构。其中Simple-RNN存在长时间信息衰减问题,LSTM与GRU则通过门结构建立了长时间信息保持通道,可有效保留提取长时间信息,并且相对于LSTM,GRU结构更加简单有效。因此这里采用GRU,详细构建如下:
(12)
(13)
ri=σ(Wrxi+Urhi-1)
(14)
zi=σ(Wzxi+Uzhi-1)
(15)
式中:运算∘表示对应元素相乘;σ为Sigmoid函数;hi、ri、zi∈Rn,hi为RNN第i时刻隐藏层向量,ri、zi为相应时刻的重置门和更新门;n为隐藏层单元数量,代表GRU的表示能力;W、Wr、Wz∈Rn×o、U、Ur、Uz∈Rn×n为权重矩阵;o表示输入层xi的维度。
需要说明的是,为了简化表达,在式(13)~式(15) 中,省略了偏置项。在MLP层,按照相同的原则进行处理,不再另行交代。
由于ht基本包含了历史观测{x1,x2,…,xt}模式信息,可以把其直接作为模式,即
c=q({h1,h2,…,ht})=ht
(16)
然后,采用典型MLP结构,具体实现E- step。由于GRU结构已经包括一定量非线性单元,MLP可以采用简单的一层结构进行目标位置预测,即
(17)
式中:Wy∈Ro×n为权重矩阵。
最后利用训练数据集,通过参数训练优化,生成典型的不确定航迹自适应预测方法。由于航迹预测是回归问题,可采用均方差作为损失函数,如式(18),而后利用梯度下降法进行W、U、Wr、Ur、Wz、Uz、Wy权重矩阵参数和偏置项参数寻优。另外训练数据集主要通过历史观测数据来构建,在构建时,应注意数据的广泛性和规范性。
(18)

采用简单的一层RNN和两层MLP结构,示范性生成了Basic-UTAFM。在实际运用中,应根据问题的复杂程度,参照神经网络模型设计、调节、优化的步骤和方法,依据数据验证结果,对RNN基本结构,RNN和MLP层数,每层神经元个数,激励函数类别、正则化、Dropout等影响神经网络性能的主要配置与选项进行选择和优化。
3 实验验证
为充分验证UTAF模型的有效性,分别进行仿真实验和实测实验,并与Baseline方法进行性能分析比较,其中仿真实验主要验证UTAF模型是否具备多模航迹预测能力,实测实验主要是在实际问题中对模型的性能表现进行验证分析。Baseline方法采用时间序列预测中的Persistence Algorithm,用t时刻数据预测t+1时刻数据。
整个实验主要采用Python语言,基于Keras和Tensorflow深度学习库,进行UTAF建模、训练、优化,以及与Baseline的性能比较分析。
3.1 仿真验证
用余弦、斜三角、阶跃、抛物线等常见基本函数,表示目标不同的运动模式,并以其为基础,混合构建4种不同数据集,分别为不同频率余弦数据集(Different Frequent Cosine data set, DFC)及添加噪声版(Different Frequent Cosine with Noise data set, DFCN),不同类型函数数据集(Different Kinds Function data set, DKF)及添加噪声版(Different Kinds Function with Noise data set, DKFN)。每种测试数据集包含4 000条训练数据,每种模式1 000条,打乱混合在一起,具体构建方法见表1。其中仿真数据集每条数据的具体构成方法为:按照200 Hz的采样频率对不同模式函数进行采样,每种模式的连续7个点作为一条训练数据,前6个点为输入,第7个点为输出。
对于4种不同数据集,分别进行Basic-UTAFM的训练、验证和测试。由数据集的构成可知,Basic-UTAFM输入和输出维度o=1,设置RNN隐藏层神经单元数量为n=10。数据集按照9:1比例划分为训练集、验证集,采用Adam(Adaptive moment estimation)寻优方法,按每批10条数据进行Basic-UTAFM参数更新,共训练遍历20次数据集。
首先,以情况较为复杂的DKFN数据集为例,通过直观展示预测结果,进行Basic-UTAFM预测性能定性分析,如图3所示。基于DKFN数据集,训练生成的Basic-UTAFM,能对数据集里面的阶跃函数和抛物线函数进行较为准确的预测,对其他两个函数的预测结果类似。同一个Basic-UTAFM,相同的参数配准,清晰地表明了UTAF和Basic-UTAFM能提取识别数据的模式信息,并基于模式进行预测。
进一步对Basic-UTAFM预测性能进行定量分析。Basic-UTAFM在不同数据集的训练误差曲线如图4所示,Basic-UTAFM预测均方误差(MSE)如表2所示。在表2中,性能提升数据列是表示相对于Baseline,Basic-UTAFM预测精度提升的百分比,其计算公式为(1-MSEBasic-UTAFM/MSEBaseline)×100,单位为%。
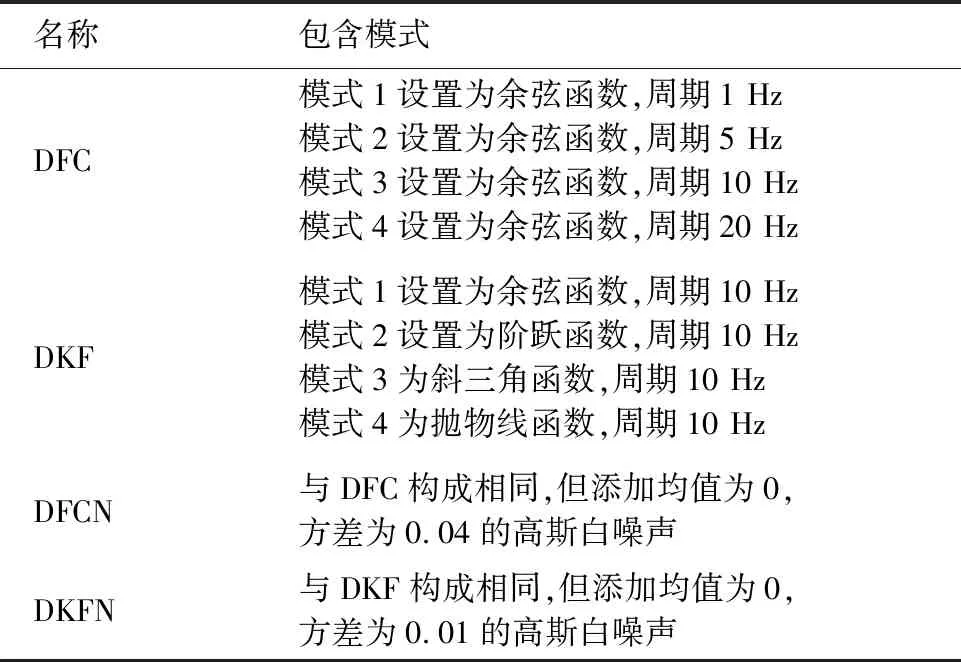
表1 仿真数据集Table 1 Simulation datasets

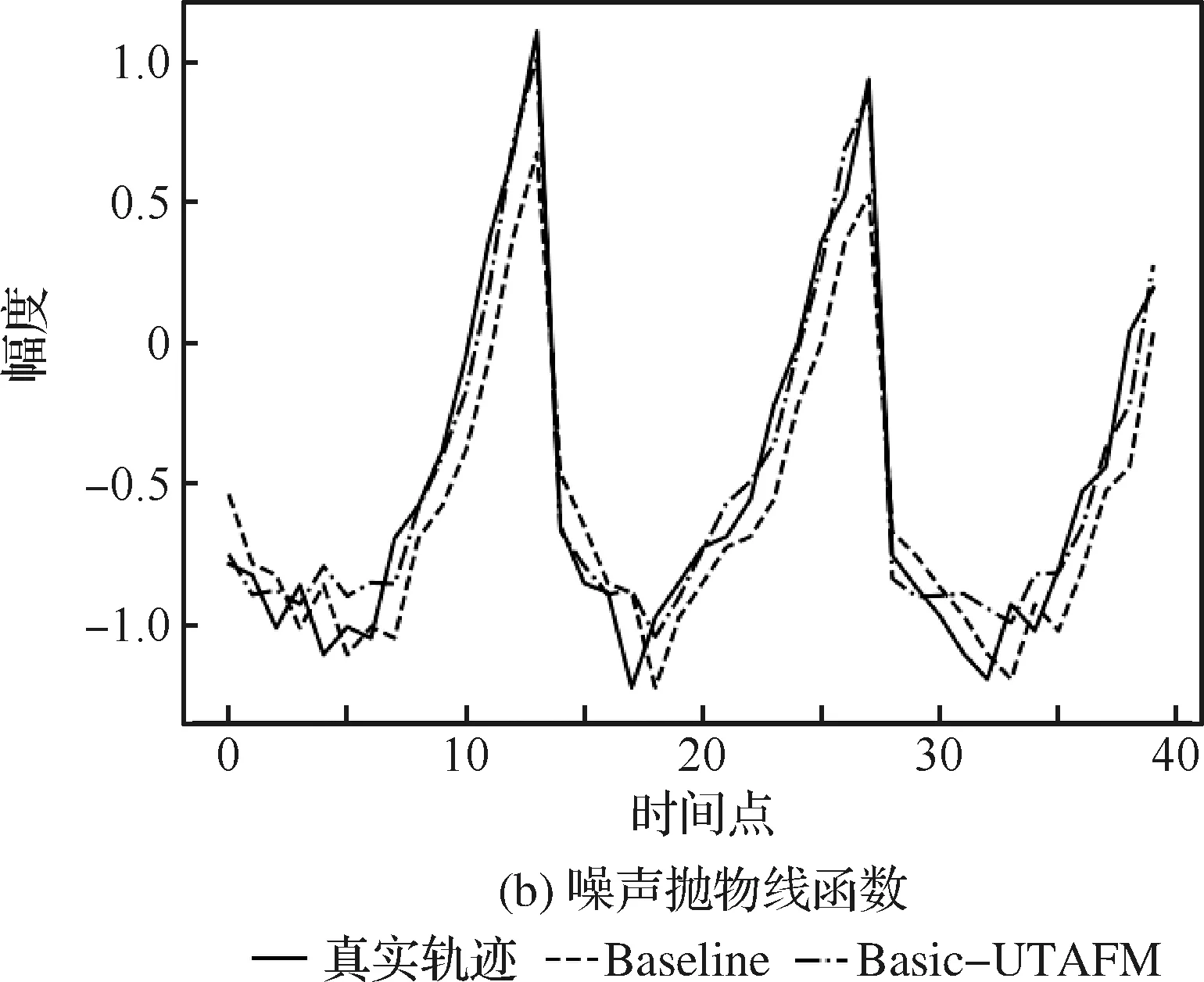
图3 Basic-UTAFM与Baseline预测结果对比Fig.3 Comparison of forecast results between Basic-UTAFM and Baseline method
由图4和表2可知,Basic-UTAFM在4种数据集下均能得到收敛的结果,并且与Baseline方法相比,预测性能提升明显:① 在DFC数据集上,误差曲线下降趋势明显,训练曲线与验证曲线基本重合,与Baseline相比,性能提升99.86%,表明在数据变化连续、模式清晰可辨的情况下,Basic-UTAFM具有很好的预测效果;② 在DFCN数据集上的表现,与DFC数据集上基本相同,但由于噪声的影响,模式的可辨性变差,性能存在一定程度下降,变为69.24%,并且在模式1数据上性能提升为-15.11%,分析主要是由于“模式1”周期为1 Hz,在相同200 Hz数据采用频率下,相邻时刻采样点间数值差别较小,如果进一步受噪声影响,则相邻时刻数值表现为来回摆动,变化趋势微弱、不明显,模式不易被Basic-UTAFM识别,导致模式1预测存在一定困难,Basic-UTAFM预测性能有一定程度下降问题。但是可以肯定,在噪声情况下,如果数据模式仍旧可辨,则Basic-UTAFM仍能取得较好的预测效果;③ 在DKF和DKFN数据集上,误差曲线下降趋势同样比较明显,与Baseline相比,性能分别提升36.37%和33.61%。但验证曲线围绕训练曲线存在一定上下波动,表明此类数据集下,Basic-UTAFM在部分数据上有较差表现。结合表2可知,Basic-UTAFM主要是对模式2阶跃函数的预测效果差,相对于Baseline,性能仅提升16.57% 和17.61%,不及整体平均水平。分析主要是由于阶跃函数存在突变,模式辨别存在困难所导致的,而噪声情况下性能1%的提升,也主要是由于噪声一定程度上缓解了阶跃函数突变效果的原因。
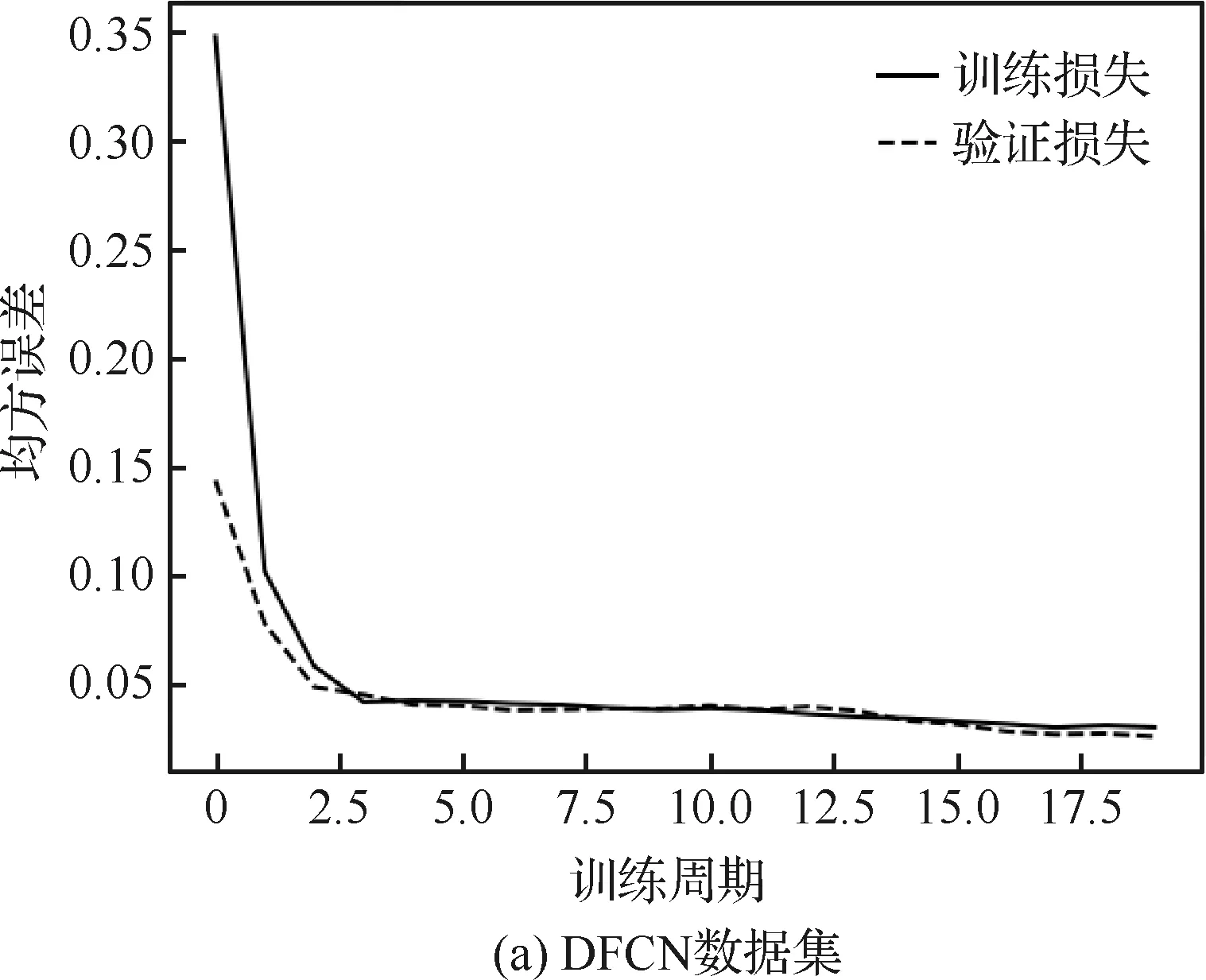

图4 不同数据集下Basic-UTAFM训练误差曲线Fig.4 Curves of basic-UTAFM training error using different datasets
进一步,DFC数据集下100次蒙特卡罗仿真结果如图5所示。可知,除了在模式1数据上,存在少量与Baseline性能相当的异常点外,Basic-UTAFM在大部分仿真中对模式1预测性能,所有仿真对其他模式预测性能,和在所有仿真中的整体预测性能,均明显优于Baseline,有力地说明了Basic-UTAFM的有效性和稳定性。

表2 Basic-UTAFM预测性能比较(仿真数据)Table 2 Comparison of Basic-UTAFM with baseline forecast performances (simulation data)
下面对Basic-UTAFM训练耗时和预测耗时进行分析,如表3所示,共设置4种不同大小数据集,采用与上面相同的模型设置和训练设置,每个数据集上训练模型20次,训练所用计算机CPU为至强E5-1620 v4 3.5 GHz,内存为16 G,没有利用GPU加速运算。
由表3可知,当数据集大小为4 000时,总训练耗时、单次训练耗时和每1 000次的预测耗时分别为74.24、3.71、0.110 s,训练耗时大,预测耗时很小,并且随着数据集增大,训练耗时线性增加,而预测耗时有一定程度下降,稳定在0.063 s,符合神经网络训练特点。按照神经网络实际运用方法,由于模型训练耗时比较大,预测耗时比较小,可以在线下对模型进行训练,训练成功后,在线上进行部署预测。

图5 DFC数据集下100次蒙特卡罗仿真Basic-UTAFM预测MSE箱形图Fig.5 Basic-UTAFM MSE boxplot through 100 Monte Carlo using DFC dataset
表3 Basic-UTAFM耗时分析Table 3 Basic-UTAFM time-consuming analysis
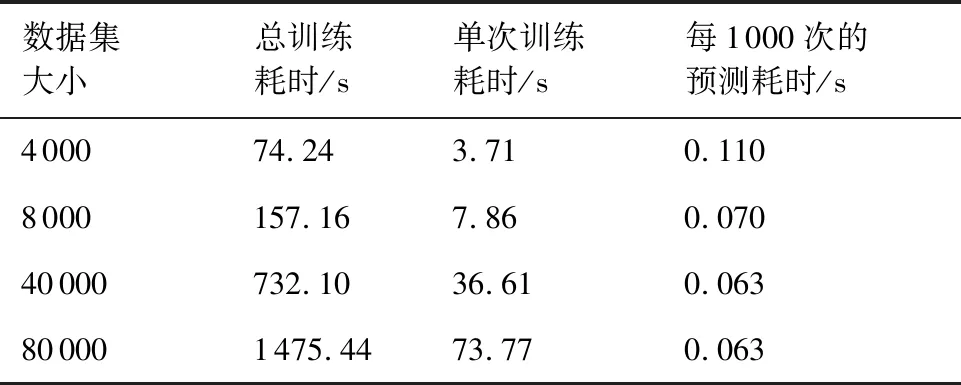
数据集大小总训练耗时/s单次训练耗时/s每1000次的预测耗时/s400074.243.710.1108000157.167.860.07040000732.1036.610.063800001475.4473.770.063
综合上述分析,可以肯定:在数据集包含多种模式,并且不同模式间清晰可辨情况下,UTAF模型和具体Basic-UTAFM能很好地提取识别出数据模式,并基于模式,进行正确有效地预测。
3.2 实测验证
进一步,通过民航飞机空中位置预测,对UTAF模型和具体Basic-UTAFM进行实测数据验证。由于飞机当前航迹点位置是由上时刻位置、加航速与时间差乘积得到的,存在确定趋势,是非平稳的,不能直接作为神经网络输入,而飞机航速的变化是平稳的,因此这里通过对航速的预测,来实现飞机航迹的预测,同时由于经度方向速度和纬度方向速度基本是不相关的,可以对其进行分别预测。
利用ADS-B设备,采集民航飞机航行轨迹数据,见图6,构建民航飞机航迹数据集(Civil Aviation Flight Track data set, CAFT),具体构建方法见表4。其中Tmax表示所有航迹内航迹点间的最大时间间隔。航迹点间时间间隔越小,航速可能的变化也就越小,信息的不确定性相应也比较小,因此需要根据Tmax把CAFT分成存在包含关系的5类数据集,即CAFT-60包含CAFT-50、CAFT-50包含CAFT-40等。另外,在实际训练时,还需要设定最大航速,对航速数据进行归一化处理,把航速限定在[0,1]或[-1,1]范围内。其中实测数据集每条数据的具体构成方法为:对每条目标航迹,按照时间先后,求取经度方向和纬度方向航速序列,然后顺序取6个连续时刻航速数据作为输入,相邻的后一个航速数据做输出,进而构成一条数据,一条目标航迹可构成多条数据。

表4 民航飞机航迹数据集Table 4 Civil aviation flight track data set
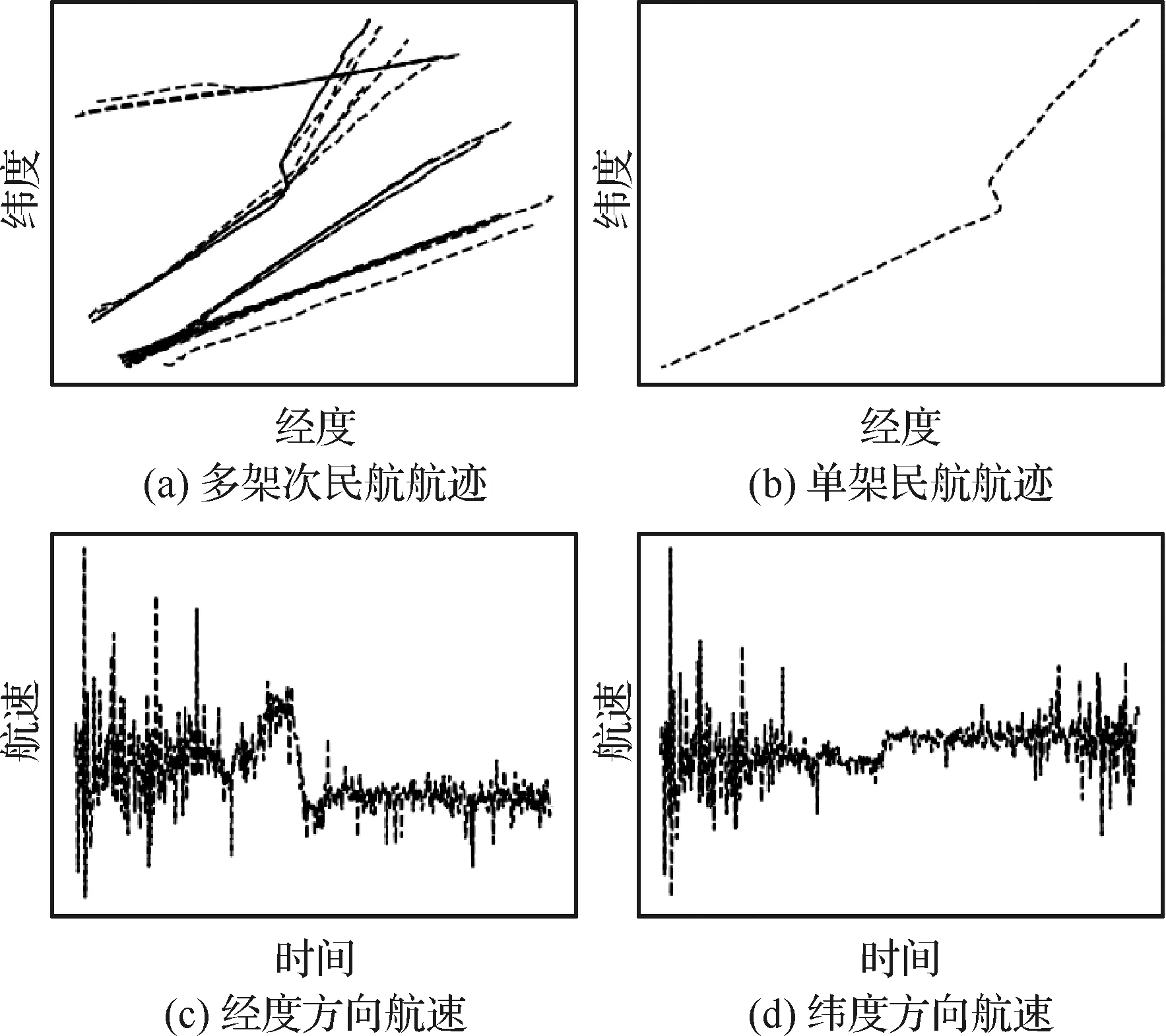
图6 民航飞机航迹和航速示意图Fig.6 Schematic diagram of civil aviation flight track and velocity
对于5类CAFT数据集,分别进行Basic-UTAFM的训练、验证和测试。由数据集的构成可知,Basic-UTAFM输入和输出维度o=1,设置RNN隐藏层神经单元数量为n=10。采用Adam自适应寻优方法,按每批5条数据进行Basic-UTAFM参数更新,共训练遍历10次 数据集,Basic-UTAFM在CAFT-20数据集下的训练过程误差曲线如图7所示。由图可见,Basic-UTAFM收敛速度快、稳定性强,训练曲线与验证曲线也基本吻合,表明Basic-UTAFM能实现飞机航迹的预测,能解决实际的航迹预测问题。
Basic-UTAFM预测MSE如表5所示,其中纬度方向和经度方向航速分别采用两个不同的Basic-UTAFM进行预测,合成表示两个Basic-UTAFM对绝对速度的预测结果,即对纬度方向与经度方向速度的L2范数的预测结果。
由表5可知,Basic-UTAFM在5类实测数据集,10个航速预测问题中均能得到良好的结果,并且与Baseline方法相比,最低提升30.91%,最高提升36.87%,大部分提升33%左右,预测性能提升明显。
综合上述分析,实测实验结果有力地表明Basic-UTAFM具有较强的适应性,能有效地解决不同实际环境中的航迹预测问题,效果明显。

图7 CAFT-20数据集下Basic-UTAFM训练误差曲线Fig.7 Curves of Basic-UTAFM training error using CAFT-20 dataset
表5 Basic-UTAFM预测性能比较(实测数据)
Table 5 Comparison of Basic-UTAFM with baseline forecast performance (measured data)

名称类别Basic-UTAFM/10-2Baseline/10-2性能提升/%CAFT-20纬度1.752.7836.87经度1.462.1230.91合成1.873.1440.44CAFT-30纬度1.492.2533.83经度1.372.0533.11合成1.572.5638.65CAFT-40纬度1.241.8432.58经度1.171.7633.36合成1.241.9436.37CAFT-50纬度1.081.6132.47经度1.191.7331.53合成1.101.7236.13CAFT-60纬度1.031.5232.03经度1.131.7233.99合成1.001.6238.17
4 结 论
1) 不确定航迹自适应预测模型具备理论严谨,先验假设少,适用范围广、通用性强等优点,克服了现有无模和有模两类技术的缺点与不足。
2) 仿真和实测实验验证清晰表明:不确定航迹自适应预测模型和相应的具体实现方法能很好地提取识别出数据模式,并基于模式,进行正确有效地预测,能有效地解决不同实际环境中的航迹预测问题,效果明显。