巨磁阻抗微型磁强计技术研究*
2019-05-22王江涛潘海林
王江涛,潘海林,张 清
(华东师范大学 计算机科学与软件工程学院·上海·200062)
0 引 言
自从我国在2014年明确提出推进民营商业资本进入航天领域,越来越多的商业公司便进入到了航天市场,拉开了我国商业航天时代的序幕。从国家颁布的《关于促进卫星应用产业发展的若干意见》来看,可以预估我国卫星产业的规模至2020年可达5560亿元以上,带动上下游经济产值可望突破万亿元规模。从全球来看,发达国家的众多卫星星座计划开始进入实质阶段,小卫星发射市场需求也呈现出快速发展的趋势,预计今后几年内的卫星发射数量会达到一个高峰。据SpaceWorks数据库的预测,2018年到2023年,全球将发射质量在1~50kg的微纳卫星近2400颗;同时NSR也预测,在未来6~7年,全球将发射约2200颗质量在100kg以下的微小卫星。由此可见,微型卫星、纳米卫星将成为未来商业航天的发展热点。这种发展趋势,对星载导航控制载荷提出了高性能、低质量、低功耗的要求。多种技术可以作为星载导航的控制载荷,起到卫星姿态控制作用[1-2]。这其中,磁罗盘技术在确保精度要求的前提下具有载荷小、功耗低和成本低的优势。
从现有的磁探测技术来看,传统的磁通门测量设备具有较高的精度和稳定性,在各类卫星上有较为广泛的应用[3]。但是,磁通门设备由于受到结构因素的制约,体积和功耗无法再减小,与集成芯片化的载荷需求存在一定的距离。在市场上现有的磁场传感器芯片中,霍尔效应器件可以实现较小的功耗和体积。但是,霍尔效应器件的灵敏度较低,无法满足高精度的导航需求。近年来,也有采用磁阻芯片用于卫星导航的报导[4]。磁阻芯片具有功耗和体积较小、灵敏度相对较高的优点,在一些应用场合中可以取代磁通门设备。但是,磁阻器件在反复测量时会有较大的磁滞效应,限制了它在高性能需求场景中的应用。
本文介绍了一种可以微型化的三轴磁强计,通过高频感应熔融快淬法制备高磁导率的巨磁阻抗(GMI)钴基丝,并用适当的退火工艺使材料达到较好的磁结构状态;采用非线性非对角驱动方式驱动材料制备巨磁阻抗(GMI)敏感元件,并设计专门的传感器驱动电路,使敏感元件运行在最佳的工作条件下。采用相敏检波电路对传感器信号进行滤波,使探测器获得极高的灵敏度。使用SOI工艺对器件进行集成化,该工艺芯片具有速度高、功耗低、抗辐照特性好、集成密度高、工作温度范围大、工艺成本低等优点。最后,芯片采用QFN封装,实现了体积小、质量小、低功耗的目标。
1 磁强计设计思路
1.1 敏感元件制备
本文研究的传感器采用了Co基非晶丝,用非线性非对角化方式产生GMI效应,相对于其他方式具有独特的优点。根据驱动电流产生的交变磁场对敏感元件的磁化程度,GMI传感器可分为线性和非线性方式。其中,非线性方式由于可以消除信号对外磁场的磁滞而备受关注。根据信号探测方式,GMI传感器又可分为对角化(从敏感元件两端拾取)和非对角化(利用绕在元件上的线圈拾取)[5]两种。非线性非对角化探测方式是驱动电流通过敏感元件的两端,从绕在元件上的线圈拾取信号,不仅减少了相互干扰,而且线圈本身可以通直流而产生偏磁场,使敏感元件工作在最敏感区域,可以灵敏地测量弱磁场[6]。图1是传感器示意图,传感器包括一个敏感元件,一个交流电源,一个绕在敏感元件上的线圈,线圈并联一个电容共同构成信号拾取电路。
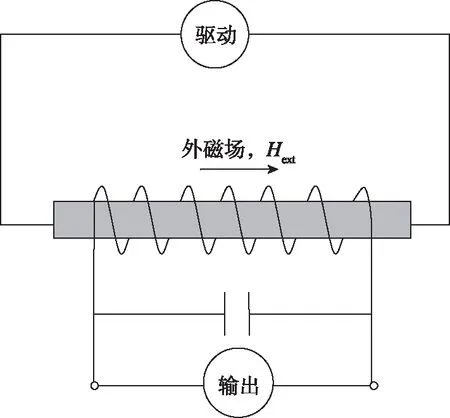
图1 敏感元件示意图Fig.1 Schematic diagram of sensitive elements
传感器输出信号如下。其中,Vφ为线圈中得到的信号,根据法拉第电磁感应定律,有
(1)
(2)
设f=2r/d,变换积分变量,可得
(3)
mφ=Mφ/M=cosθ,mz=Mz/M=sinθ
hφ(r,t)=Hφ(r,t)/Ha,he=He/Ha
(4)
其中:N为线圈匝数,ω为通过材料丝的驱动电流的角频率,I0为驱动电流的幅值,d是玻璃包裹丝的直径,r是指丝内部的某一点距离玻璃包裹丝中心轴的垂直距离。Hφ(r,t)是用来描述丝中驱动场在空间和时间中分布的物理量。M是丝的饱和磁化强度,Mφ是丝的环向磁化强度,Mz是丝的轴向磁化强度,Ha是玻璃包裹丝的环向各向异性场。θ是磁化矢量和丝环向易磁化方向轴的夹角,He是沿轴向的外加直流磁场。其中,mφ是ω和t的函数。由式(4)可知,传感器的输出信号是由he、I0、ω、t几个变量决定的,也就是说传感器的输出信号是由驱动信号和外磁场决定的。当驱动信号确定以后,传感器的输出信号便和外磁场一一对应。
1.2 相敏检波电路设计
采用图2所示的电路框图,实现信号的拾取、相敏检波,反馈主要进一步提高灵敏度和温度可靠性。偏置和反馈线圈的目的是让探头工作在最敏感区域,提高灵敏度。在基于GMI效应的弱磁磁强计研发方面,采用的先进技术包括:(1)二次谐波;(2)谐振;(3)相敏检波;(4)负反馈。这4种技术均有利于灵敏度和线性度的提高,技术(4)有利于温度特性和线性度的提高。

图2 电路设计框图Fig.2 Circuit design block diagram
1.3 微型三轴磁强计电路集成化
将芯片划分为低温度系数恒流源、高性能运放、高频振荡器、数字斩波器、有源滤波器、直流放大器等几个子功能模块。采用SOI工艺将电路各部分进行集成化。电路原理图如图3所示。由于研制的GMI传感器敏感元件工作在交流条件下,加之元件本身并非纯电阻电路,而且在外磁场的变化下其阻抗还会发生一定的变化,因此就需要一套专门的驱动电路。驱动信号是正弦信号,该系统可以非常方便地改变驱动信号的大小和频率,来适应敏感元件阻抗的变化,使其一直工作在最佳的工作状态下。模拟信号处理电路通过振荡电路产生的方波信号经过两次分频电路,分别分出了一个四分频和一个二分频信号,四分频信号通过驱动系统调制成同频率同相位的正弦波,以驱动敏感元件,调整合适的工作条件,使得敏感元件产生二次谐波。之后,该信号就可以被与由二分频产生的信号进行比较。由于二分频的信号和驱动信号是同相位的,所以它和二次谐波信号也是同一相位的。通过二分频的信号来控制电子开关,便可以对传感器的信号进行相敏检波,可以锁定信号中某个相位的信号进行分析,大大提高传感器的信号识别力和灵敏度。

图3 电路原理图Fig.3 The circuit principle diagram
在此电路设计的基础上,采用SOI工艺对传感器电路进行集成化。芯片的封装采用24脚QFN封装,如图4左所示。3块芯片敏感方向按照正交方式排布安装构成探测器,封装后的探测器大小如图4右所示。

图4 芯片封装和探测器Fig.4 Chip Packaging and Detector
2 试验结果
2.1 磁场动态响应测试
对传感器的磁场动态响应进行测量,方法为将被测微型磁强计置于零磁空间标准线圈内的测试台上并调整水平,为线圈加以0.5Gs的磁场,逐步调整传感器敏感轴方向。当传感器输出电压为最大时,敏感轴与线圈磁场方向一致,然后给线圈分别加以不同电流,相对磁场强度为0、±0.1Gs、±0.2Gs、±0.3Gs、±0.4Gs、±0.45Gs、±0.46Gs、±0.47Gs、±0.48Gs、±0.49Gs、±0.5Gs,记录磁强计敏感轴方向的输出电压。如图5所示,为磁强计敏感轴方向在±0.5Gs磁场环境下的电压实现响应输出,可以看到在磁场强度为±0.5Gs时,敏感器的输出电压约为0~5V。测量结果表明,该传感器的输出电压和外磁场在±0.5Gs范围内为一一对应的线性关系,可以在地磁场范围内正常工作(地磁场强度<0.5Gs)。

图5 敏感轴磁场动态响应Fig.5 Dynamic response of sensitive axis to magnetic field
2.2 噪声测试


(a) 传感器输出噪声

(b) 噪声纹波频谱密度图6 传感器输出信号噪声Fig.6 Sensor Output Signal Noise
3 结 论

