一种气动三维平台设计
2019-05-21王万金周治江罗文广王亚军
王万金, 周治江, 罗文广, 王亚军
(中国核动力研究设计院, 四川成都 610041)
引言
在压水堆乏燃料组件池边检查过程中,彩色CCD镜头和其他专用传感器组件通常搭建在水下三维移动平台上,对乏燃料组件进行水下外观检查和尺寸测量等操作[1]。因此,水下三维平台的可靠性直接关系到池边检查设备工作的稳定性和效率。目前,这类水下三维移动平台[2-5]主要采用伺服电机进行驱动,然而用于水下作业的伺服电机成本高昂,且为保证其工作的可靠性,通常需要进行辐射屏蔽设计,最终导致驱动系统结构复杂,体形庞大,影响水下三维平台的布置和使用。
考虑到三维移动平台需长期工作在乏燃料水池水下10 m处,且水下辐射环境较为复杂,同时气动元件内部没有电子元器件, 其环境适应能力强且工作过程中安全无污染[6-7]。因此,本研究设计了一种气动三维平台,该平台采用气动马达作为动力源,驱动三维平台实现空间三个方向的直线运动,能够准确地将传感器送至水下指定位置。
1 三维平台结构和气动马达性能
气动三维平台如图1所示,其结构主要由快速连接机构、X向传动机构(行程400 mm)、Y向传动机构(行程300 mm)和Z向传动机构(行程150 mm)组成。其中X/Y向传动机构均由气动马达、大小链轮、链条、不锈钢丝杠模组、滑动杆、直线轴承等部件组成,与之不同的是,Z向传动机构采用涡轮蜗杆机构代替了链轮传动。平台运动时,X向传动机构和Y向传动机构通过气动马达带动小链轮和链条转动,进而带动大链轮,驱动与大链轮连接的丝杠模组运动,从而实现气动三维平台的X/Y向运动;Z向传动机构通过气动马达带动蜗杆,进而带动涡轮,最终驱动与涡轮连接的丝杠模组,从而实现气动三维平台Z向运动。

图1 气动三维平台结构示意图
气动马达的性能指标由以下公式计算得到。
1) 循环指示功Wi:
(1)
式中,p—— 缸体内气体瞬时压力,Pa
V—— 缸体内气体瞬时体积,m3
φ—— 主轴转角,rad
2) 平均指示压力pi:
(2)
式中,Vh—— 单缸的工作容积,m3
s—— 活塞行程,m
D—— 缸体直径,m
3) 平均有效压力pe:
pe=ηm·pi
(3)
式中,ηm—— 马达机械效率
在气动马达工作过程中,需要时刻保持马达的进气口压力不变,每一个恒定进气压力值都对应一条速度特性曲线,由最大额定进气压力决定全负荷速度特性曲线[8],依据上述公式,可以得到选定的气动马达性能曲线如图2所示。
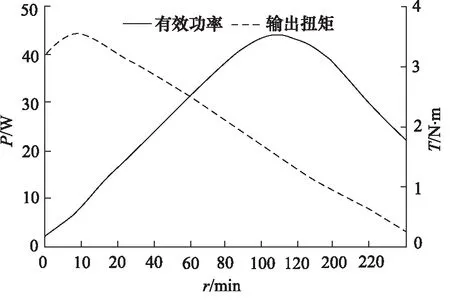
图2 气动马达性能曲线图
2 气动三维平台气路系统设计
气动三维平台气路系统包含气动马达正反转系统和气动马达防水倒灌系统两部分。其中气动马达正反转系统主要用于气动马达正反转控制和调节气动马达转速,气动马达防水倒灌系统主要用于保持系统工作在正压状态,防止系统的水下接头部分出现漏水现象,进而阻止乏池水进入气路,破坏气动设备。气动三维平台的气路系统原理图如图3所示。

1.气源 2.过滤器减压阀 3.比例压力阀 4.消声器 5.三位五通电磁换向阀 6、11、12.单向阀 7.压力表 8.气瓶 9.二位三通手动阀 10、13.二位二通气控阀 14.气动马达 15.二位二通常断电磁换向阀图3 气动三维平台气动系统原理图
2.1 气路系统分区设计
在设计气路系统时,将系统分为3个部分,分别为水下部分、转接箱和机箱。在机箱气管与转接箱气管相连的位置设计有单向阀,这样即便发生水下部分的系统漏水,乏池水循环至岸上进入转接箱,但最终不能够进入机柜,造成电气设备故障。同时,由于转接箱的存在,系统能够将接触乏池水后被沾污的气管与岸上未被沾污的气管分开,避免发生交叉污染。
2.2 气动马达正反转设计
图3所示的气动三维平台气动系统原理图中,以气动马达X为例,低压气经过滤器减压阀2减压后,经电气比例阀3调整输入的气压后,输入至三位五通阀5,通过控制三位五通阀5导通,进而使低压气输入至气动马达14。当三位五通阀5左侧通电时,此时气体分为两路,一路气体将气控单向阀13导通,另一路通过单向阀11进入气动马达B口,气体从A口和C口出来,其中C口气体通过二位三通手动阀9进入消声器, A口出来的气体,通过气控单向阀13和二位三通手动阀9进入消声器,从而驱动气动马达X反转。
当三位五通阀5右侧通电时,此时气体分为两路,一路气体将气控单向阀10导通,另一路通过单向阀12进入气动马达A口,气体从B口和C口出来,其中C口气体通过二位三通手动阀9进入消声器, B口出来的气体,通过气控单向阀10和二位三通手动阀9进入消声器,从而驱动气动马达X正转。
电气比例阀用于接收PLC控制器输出的控制信号,进而调节输入三位五通阀的气压,从而控制通入气动马达的气压,最终调节气动马达的运行速度与输出扭矩。节流消声器一方面消除噪声,另一方面通过调整节流口开度,进而调整气动马达的运行速度与输出扭矩。
2.3 气动马达防水倒灌功能设计
此外图3所示的气动三维平台气动系统中,3路气动马达均设有防水倒灌功能,当系统停止使用时,能够对气路进行充气使系统内部保持正压力状态,该压力值大于水的压力,防止水进入气路系统,同时还具备监测回路中是否漏气的功能。
同样以气动马达X为例,对该子系统进行阐述:当系统停止使用时,将二位三通手动阀9调至另外一个工位,使气动马达的C口与气瓶8相连,同时使二位二通常断电磁换向阀15通电,对气瓶8进行充气片刻后切断充气。此时压力表7显示系统压力,若有压降,则系统漏气,需将气动三维平台升至水面进行检修;若无压降,系统在正压的作用下,乏池水则不会进入系统,使得系统能够长时间暂存在乏燃料水池。
3 计算机测控系统
图4为气动三维平台的电控原理图,气动三维平台的控制主要包括就地控制和远程控制两种类型。系统工作时,就地控制柜(包括按钮与触摸屏)或远程操作手柄发出X,Y,Z移动触点信号输入至PLC的数字量模块,经逻辑运算后,输出数字量化信号,进而驱动比例压力阀和三位五通电磁阀工作在对应位置,使压缩空气输入至气动马达。气动马达旋转带动丝杠移动,从而调整安装于三维平台上检测设备的空间位置。
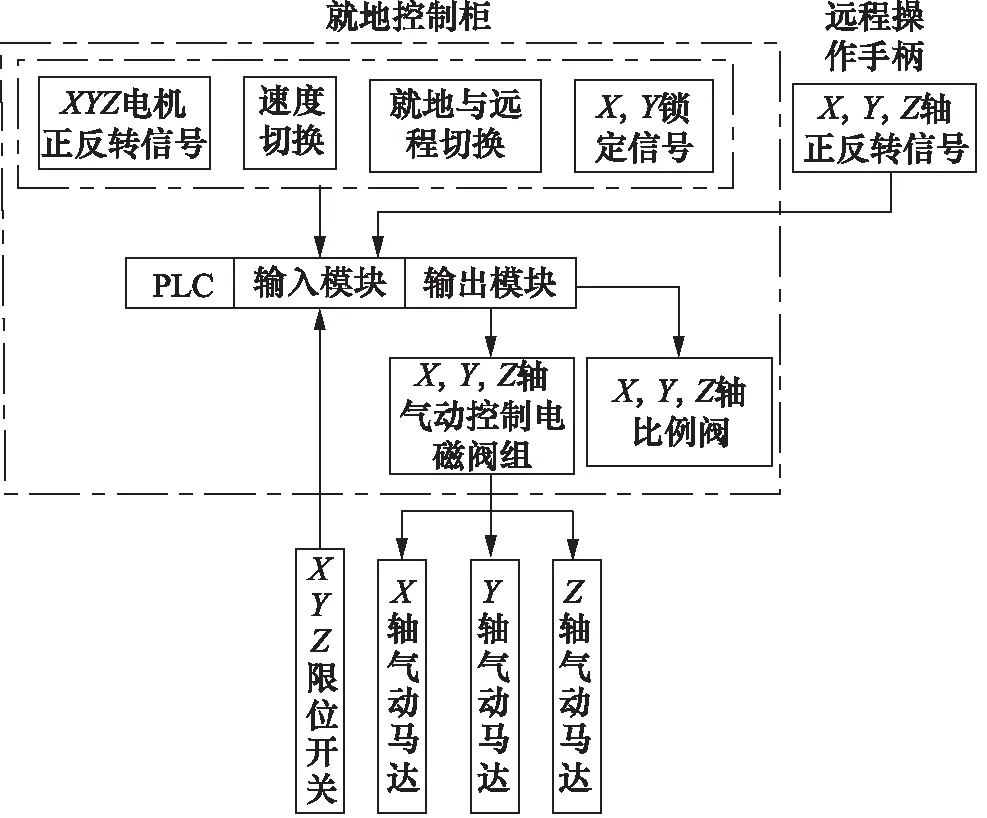
图4 气动三维平台的控制原理图
现场就地控制柜设有就地控制与远程控制切换按钮,当切换到远程控制时,此时远程操作手柄的信号有效。就地控制柜与远程控制均设置由X,Y,Z前进后退按钮,同时就地控制柜设有由X,Y轴锁定按钮,通过该按钮实现X轴、Y轴锁定。
此外,就地控制柜还设有速度调节选择开关,该开关信号输入至PLC后,经逻辑运算处理,输出信号至电气比例阀,通过电气比例阀调整输入三位五通电磁阀的气压,进而调整输入至气动马达的低压气的压力,最终调整气动马达运行速度。就地控制柜同时设有相关指示灯,灯光显示的信号能够向工作人员提示三维平台的状态,如极限位置提醒、前进、后退指示等;在就地控制柜设置的触摸屏系统中,包含能够显示出三维平台的状态功能,并显示出系统的相关状态报警信号,警示操作人员进行对应的操作控制。
为防止三维平台在收到停止信号时,出现平台越过制动位置的情况,系统在收到制动信号并产生动作的同时,会自动给出一个反向同等开度信号,对气动马达供气,该供气的作用时间约500 ms,实现准确制动气动马达的目的。
4 试验测试
完成气动三维平台的理论设计后,对气动三维平台的各项性能进行了试验测试[9-12],气动三维平台的实物结构如图5所示。

图5 气动三维平台试验测试
4.1 运动特性测试
运动特性测试是指在额定0.7 MPa压缩空气输入时,通过PLC控制比例阀30%, 60%及100%开度对气动三维平台的三轴运动状态进行测试,这是一种能够全面反映气动三维平台的设计、加工、装配的测试方法,测试结果如表1所示。

表1 气动三维平台运动指标
测试结果表明气动三维平台在额定负载下能够实现平稳运动,整个过程无顿挫现象,在给定停止指令后,能平稳停止运动。
4.2 保压测试
将气动三维平台浸没在水中,当三维平台停止使用时,将3组二位三通手动阀调至气动马达的C口并与气瓶相连接,同时对3组气瓶进行充气片刻后切断充气,记录此时气压为0.6 MPa,保压4 h。保压期间,系统所在的水中无气泡产生,系统压降小于0.01 MPa,证明系统无泄漏。
5 结论
在分析国内外水下三维移动平台研究基础上,设计了一套气动三维平台系统,采用气动马达代替水下伺服电机,不仅减少了成本,而且也增加了系统的安全性。最后,对气动三维平台系统进行了全面的性能试验以及长时间的运行考验,所设计的气动三维平台依旧保持良好的运行状态,满足压水堆乏燃料组件池边检查。
本设计创新之处主要体现在以下几个方面:
(1) 系统设有防水倒灌回路,系统停止工作时,整体回路能够保持正压状态,阻止乏池水进入系统,使其能够长时间暂存在乏燃料水池;
(2) 气路实行分区设置,确保了乏池水不会进入电控柜,且将沾污与未沾污组件有效隔离;
(3) 气动马达停止运动时,系统设有主动制动方式,有效地减少了气动平台收到停止信号时越过制动点的距离。
