抽水蓄能机组电路等效实时精细化模型研究及应用
2019-05-18赵志高杨建东杨威嘉彭煜民
赵志高,杨建东,杨威嘉,陈 满,彭煜民
(1.武汉大学 水资源与水电工程科学国家重点实验室,湖北 武汉 430072;2.南方电网调峰调频发电有限公司,广东 广州 510630)
1 研究背景
随抽水蓄能电站数量增多、容量增大及在电网结构中比重不断上升,其运行稳定性和安全性越来越受到相关部门和学者的重视[1-3]。抽水蓄能机组模型仿真,不仅可以为过渡过程优化控制奠定模型基础,而且可为其实际电力生产过程提供可靠且有效的技术支持,降低机组各种试验成本和风险。因此,对抽水蓄能机组调节系统精细化模型研究具有重要的理论意义和工程应用价值。
归纳已有研究,水电机组调节系统模型主要分为3 种:线性模型、半非线性模型、全非线性模型。线性模型中输水系统采用刚性水击或似弹性水击模型、水轮机采用六参数模型,该模型优点是计算实时性高,稳定性好,可应用于水电机组控制优化[3-5]中,但线性模型不能准确反映大波动工况下机组过渡过程。半非线性模型[6-7]是针对研究的侧重点不同,实现系统部分环节的非线性化。文献[6]采用了弹性水击模型和非线性函数拟合水轮机模型进行参数辨识取得较好结果,但是该模型并不能反映调压室涌浪、尾水管压力脉动等瞬态指标。文献[7]重点研究水泵水轮机强非线性,利用正弦函数拟合“S”特性区,解决了全特性曲线交叉、多值缺点,但是刚性水击模型无法反映输水管道水力瞬变过程。全非线性模型考虑调节系统各模块的非线性,求解精度较高,但模型的复杂性使其成为研究难点。文献[8]利用SIMSEN软件模拟抽水蓄能机组甩负荷工况的动态过程,充分考虑了引水系统及水泵水轮机的非线性,用于抽水蓄能电站过渡过程计算效果良好,但是高度集成的商业软件并不能满足抽水蓄能机组控制优化、参数辨识及工程实时仿真的需求。
从电站安全稳定运行角度出发,抽水蓄能机组建模的重点主要体现在输水系统和水泵水轮机。(1)输水系统的刚性及弹性水击模型实现简单、实时性高,但是该模型不能反映不同拓扑结构输水管道对电站的水力影响;基于特征线法[9]的输水系统模型求解精度较高,但是该方法仿真耗时过长,计算效率低。(2)基于六参数或流量、力矩函数的水泵水轮机内特性模型,适用于小波动工况,较难描述大波动工况尤其是“S”特性区的机组实际情况;基于全特性曲线的插值模型,可以仿真全工况范围内的机组运行特性,但是“S”特性区交叉、多值特点对全特性曲线的处理和插值方法提出更高要求。
针对以上研究不足,本文提出一种抽水蓄能机组RAECM模型。该模型可以协调过渡过程中的计算精度与仿真效率之间的关系,为抽水蓄能机组控制参数优化、系统辨识和在线仿真测试奠定了新的模型基础。
2 电路等效理论
水体在有压管道中的运动可由动量方程和连续性方程描述:

根据集总参数电路等效理论[10],有压输水管道与电路均匀传输线具有相似的数学模型,以电压U代替水头H,电流I 代替流量Q,即可得长度为dx 的有压输水管段等效电路模型RLC参数如下[11]:
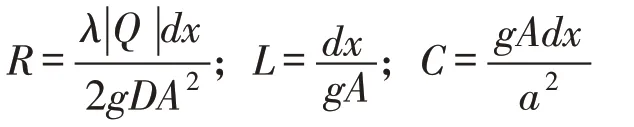
式中:A为管道的横截面积,m2;R为管道流阻反映水体的摩擦损失,s/m3;C为管道流容反映水体和管壁弹性,m ;L为管道流感反映水流惯性,s2/m3;。以第i段基本管为例分析,管段中心位置水头Hi+1/2、管段进出口流量Qi和Qi+1为状态变量,进出口水头Hi和Hi+1为管段边界条件,对应的基本管段的T型等效电路图[10]如图1所示。
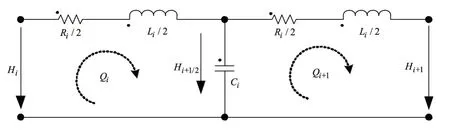
图1 基本管段的T型等效电路
3 抽水蓄能机组建模
3.1 输水系统建模依据抽水蓄能电站输水管道实际布置情况对管路进行划分;基于等效电路理论,对调节系统各水力模块进行等效,构建电路网络拓扑图;根据基尔霍夫定律列写拓扑网络的微分方程,即得到全流道系统的电路等效数学模型。实际电站全流道管路布置情况可由n段上述基本管组成,其单管单机和一管双机布置下电路网络拓扑结构如图2所示,其中调压室、球阀、叉管及水泵水轮机等边界的电路等效处理详见文献[12]。
选取离散后每段基本管的中心水头与端口流量作为系统的状态变量管路两端水头组成边界向量如下:


图2 实际电站输水系统电路网络拓扑结构

由基尔霍夫定律可推导图2所示全流道系统的非线性常微分状态方程如下:



式中: A1为感抗矩阵反映水体惯性; A2组成容抗矩阵反映水体及管壁弹性;B1为阻抗矩阵反映水流的摩阻损失;B2、B3为边界系数矩阵;B3为顺时针旋转180°得到,反映边界向量对系统动态影响。随状态变量变化并且随管道水头变化,使得该微分方程组呈现非线性。
3.2 水泵水轮机建模水泵水轮机全特性曲线处理及插值精度直接影响抽水蓄能机组在全工况尤其是“S”特性区极端工况的动态特性。本文首先采用改进Suter变换方法对原始全特性曲线进行处理,解决其交叉、扭转、聚集问题;然后建立BP神经网络对处理后曲线进行开度线加密、数据点延展、坏点修正;最后采用三点两次拉格朗日插值算法求解水泵水轮机模型,流程如图3 所示。值得指出的是,预处理阶段并未参与到模型的实时求解中,因此该模型在得益于BP神经网络自学习和预测能力的同时,可以避免BP复杂的网络函数带来的计算负担,大大提高计算效率。
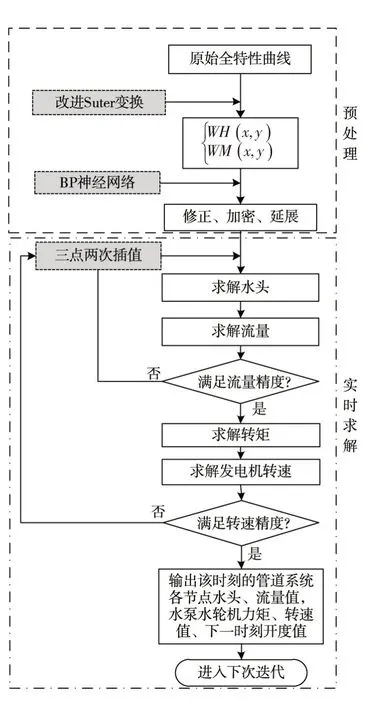
图3 水泵水轮机模型求解流程图

图4 预处理后全特性曲线图

图5 神经网络训练过程
改进Suter变换方法如下[13]:
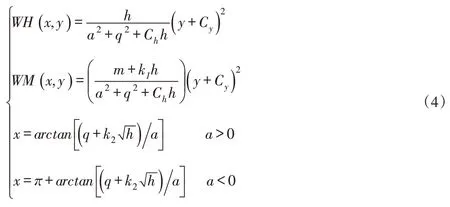
式中:a、q、h、m、y 分别为机组转速、流量、水头、转矩和开度相对值;x 为相对流量角;参数k2=0.5 ~1.2,Cy=0.1 ~0.3,Ch=0.4 ~0.6。WH为水头变换函数;WM为力转距变换函数,变换后曲线虽然解决了交叉、多值问题,但是仍存在3种现象:(1)各条开度线长短不一,数据点分布不均匀;(2)模型试验测量误差,使得全特性曲线上存在坏点(图4放大部分所示);(3)大开度对应曲线稀疏,小开度对应曲线密集。这些问题的存在严重影响插值精度,甚至会出现稳态工况点参数波动状况。
针对上述问题,建立BP神经网络对变换后全特性曲线进行数据延展、坏点修正及开度线加密处理。考虑到WH与WM之间的耦合关系,采用两输入(x,y)、两输出(WH,WM)双隐含层结构BP神经网络模型,最大迭代次数1000 次,隐含层节点数均为15,学习率为0.1,神经网络训练目标误差为1×10-7。由图5 的误差均方差收敛曲线和回归分析可知,随着迭代次数增加,BP 神经网络的训练、交叉验证、测试过程的输出误差都急剧减少,这说明通过误差反传训练的多层前馈网络,BP神经网络已经归纳了模型试验数据序列中全特性参数间的非线性关系,能够较好实现开度线加密及数据延展。由图4和图5(c)可得,经测试神经网络预测曲线的最大相对误差仅为0.038,且最大相对误差仅出现在反水泵、水轮机制动和水泵制动等特殊工况区的少量模型试验数据点,这表明BP神经网络并没有机械复现模型试验数据序列,而是通过蕴含其中的规律性理解,恰当调整了少数模型试验数据(坏点),剔除模型试验观测误差干扰,如图4放大部分,BP神经网络处理前后曲线对比可知,工作参数变化规律在局部区域突变状况趋于平滑,有利于提高插值计算精度。
采用三元两次拉格朗日插值算法求解全特性曲线,插值公式如下。
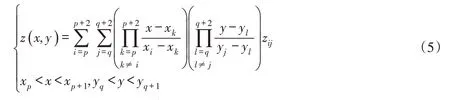
当机组处于静止停机工况点、发电与抽水工况间转换时,传统的水头、力矩求解方法[13],会因插值不连续导致仿真报错,因而通常对开度为0的情况单独处理。本文提出改进Suter反变换水头-力矩求解方案如式(6),下标n为迭代步数。该方法综合考虑了导叶开度为0或者接近0、相对转速和相对流量同时为0的水头求解情况,缓解了机组在静止工况点及小开度工况点插值不稳定的问题,提高了仿真模型在全工况范围内的求解精度。

抽水蓄能机组调节系统其它模块如液压随动系统、发电机及负载等数学模型参照文献[14-16]。
4 模型时空离散分析
4.1 变尺度空间离散分析库朗稳定性条件[17]通过水击波速c 将管道的空间分段步长dx和仿真时间步长dt 联系起来,即dt ≤dx/c=dT ,dT 为管道的分段时间步长。基于分布参数理论的特征线法(Model of Characteristic,MOC)[15]是目前应用最广泛的求解有压管道非恒定流的方法。当采用调整波速法进行管路划分时,由于其分布式参数特征,仿真时间步长即为管路空间分段步长。这就决定了特征线法常采用小尺度空间步长离散,精度较高但编程复杂;采用大尺度空间步长离散时,由于仿真时间步长同样被放大,导致截断误差增大,计算精度不能满足要求甚至不收敛。
本文所建基于电路等效理论的输水系统模型,其本质为集总参数模型,该模型首先根据电站实际的管路布置形式建立等效电路拓扑网络,根据基尔霍夫定律列写系统隐式矩阵形式的非线性常微分方程,然后根据设置管道空间分段步长确定矩阵维数。与传统特征线法相比,其优势在于管路空间分段步长不再受仿真时间步长限制,在满足计算精度的前提下,可以通过适当增加dT,使模型计算阶数和数据流复杂程度显著减少,有效协调模型计算精度与仿真耗时之间的关系。
分别设置dT 为0.02 s、0.05 s、0.1 s 及0.5 s 的等效电路模型甩全负荷工况下机组过渡过程并与MOC模型比较如表1,随空间分段步长增加,蜗壳末端水压最大值逐渐降低,尾水管压力脉动最小值逐渐增大。如图6分析原因可知,随着管路空间分段的增加,由基本管段中心到末端,管道摩阻及水体惯性需要考虑,否则因空间分段步长造成的截断误差会逐渐增大,影响计算精度。因此,在大尺度空间离散时,需要对RAECM模型进行修正。
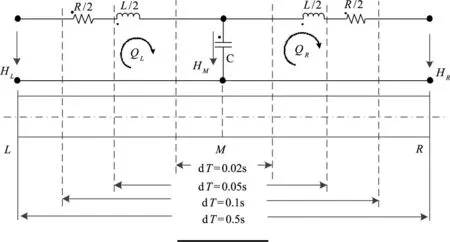
图6 不同空间分段步长基本管误差修正原理
从理论角度对管道空间离散引入的截断误差进行分析,依据图1所示基本管等效电路,两端水头泰勒展开关系式如下:

整理可得,第i段管的水头Hi的偏导数如下:


由于有压管道中波速远大于水的流速,且流容C与有压管道波速平方成反比,故dT适当增加时可忽略影响,式(8)的主要集中在等式右边第一项,即以差商可近似代替微商。因此,根据图6进一步可得:

动量方程和连续性方程在修正管中推导如下:
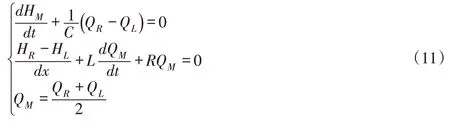
进一步得:

因此,对于第j 段修正管,若修正点位于基本管右侧,修正公式如式(13),若修正点位于基本管左侧,修正公式如式(14):
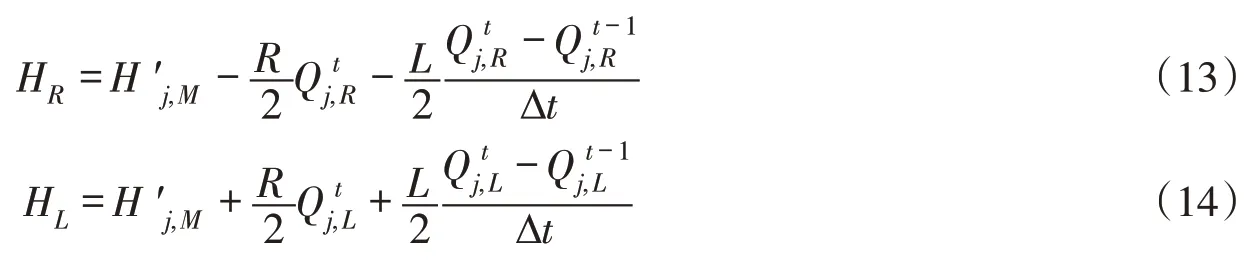
式中:HR、HL为第j 段单元管修正后水头;为第j 段单元管修正前水头(即单元管中心点水头);分别为第t和t-1时刻第j段基本管右侧流量;分别为第t和t-1时刻第j段基本管左侧流量;Δt 为仿真时间步长。

表1 甩负荷工况变尺度分段等效电路模型与特征线对比表
如表1所示,小尺度(dT <0.05 s)空间离散模型由于管路分段数足够多,分段误差不足以影响计算精度,所以修正前后数值相近,均能满足仿真要求;大尺度空间离散模型经修正后,相比未修正小尺度模型计算精度更高。
4.2 变尺度时间离散分析对于式(2)具有隐式矩阵形式的非线性常微分方程组,进一步整理可得:

式中:E 为系统特征矩阵,其特征值sk=σk+jωk,k=1、2、…,表征系统稳定性;σk为阻尼系数;ωk反映系统的振荡频率。实数特征值代表阻尼模态对应于抽蓄机组刚性水击,复数特征值代表振动模态对应于弹性水击。如图7 所示,随空间分段步长增加,特征点数目减少,模型解算效率提高,并且RAECM 模型所有特征点均分布于复平面左侧,对应所有sk均处于负阻尼状态,满足系统稳定条件[17]。所有的复数特征点在复平面上呈对称分布,反映了弹性水击影响下水锤波在输水管路中往返运动特征。
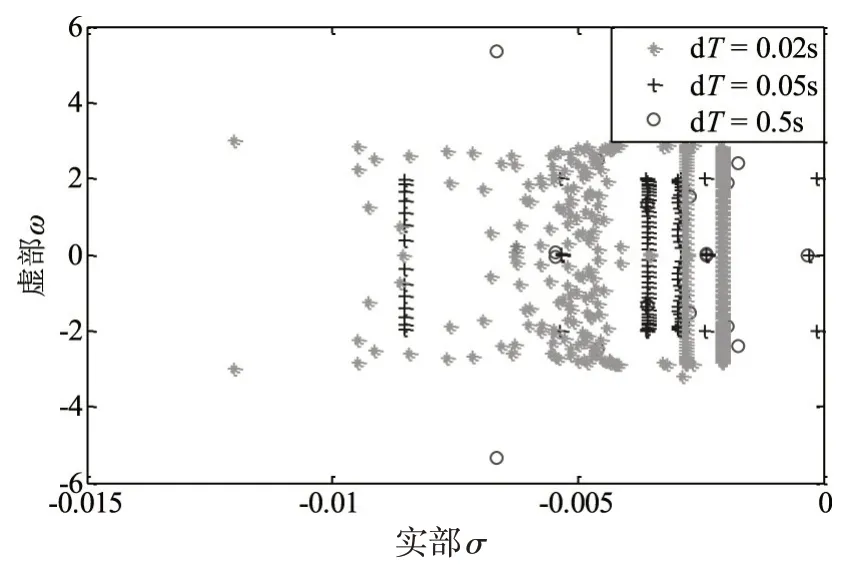
图7 甩负荷工况下不同空间分段步长RAECM模型特征点复平面分布
本文引入一种基于拉道求积公式的隐式R-K法(即RadauIIA法)求解式(15)的非线性全微分方程组,隐格式差分法具有无条件收敛,时间与空间步长独立的优点,其表达式如下:
式中: yn、 yn+1为第n 次、n+1 次仿真系统输出;Δt 为仿真时间步长;系数ci、bi、aij均为常数,由Butcher阵列[18]可得c1=1/3、c2=1、a11=5/12、a12=-1/12、a21=3/4、a22=1/4、b1=3/4、b2=1/4。
为了有效协调RAECM模型的计算精度和仿真效率之间的关系,需要分析不同求解算法在不同时间离散步长下的模型稳定性。四阶显式R-K法和隐式RadauⅡA法的稳定性函数分别为:

式中: z=dt ⋅sk;dt为仿真时间离散步长;sk为RAECM模型特征矩阵特征值。是状态方程(2)数值求解稳定标准条件。分析空间分段步长dT=0.05 s 的RAECM 模型在不同仿真时间步长dt为0.02 s、0.05 s、0.1 s时求解稳定性如图8。当空间离散步长dT满足库朗条件时,四阶显式R-K法和隐式RadauⅡA 法均能保证系统求解稳定(图8(a)(b)),当时间离散步长大于空间离散步长(图8(c)),z值的增大使其在复平面上的分布超出四阶显式R-K法的稳定域,出现求解不稳定,隐式RadauⅡA法则仍能保证系统求解的绝对收敛。在抽水蓄能机组导叶关闭末端,尾水管高频压力振荡使得RAECM模型特征矩阵的特征点sk的虚部增大,同样不利于显式R-K法的求解稳定,而RadauⅡA法求解更能反映机组水压实际的瞬变过程。
5 仿真实例分析及应用
为验证抽水蓄能机组RAECM模型的有效性、精确性及稳定性,针对国内某抽水蓄能电站输水管道实际布置情况、调节系统各模块真实参数,建立如图2(a)所示的单管单机抽水蓄能机组等效电路网络拓扑图,在满足库朗条件和求解稳定性条件的前提下,按章节4对全流道系统进行离散,并采用水头修正公式对离散截断误差进行补偿,得到抽水蓄能机组RAECM模型,进一步将该模型用于大波动工况和空载运行工况仿真试验中,并与MOC 模型和现场试验实测数据(采用QuantumXMX840A-P高速数据采集系统)进行对比分析。
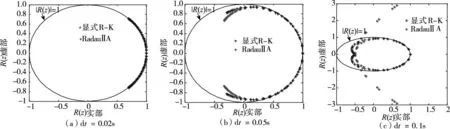
图8 甩负荷工况下不同空间分段步长RAECM模型特征点复平面分布
5.1 大波动工况水泵断电工况是对电站各动态指标考验严峻的极端工况。设置上库水位731.9 m、下库水位167.7 m、流量-49.37 m3/s、机组出力279.93 MW,跳开断路器时间7.82 s,与现场数据采集时机组实际运行状况严格保持一致。将实测导叶开度输入到抽水蓄能机组RAECM模型中,得到水泵断电工况过渡过程各指标变化,并与MOC模型及现场实测数据对比如图9,各动态指标特征值对比如表2。由图9可知,本文所建RAECM模型的各指标与MOC模型及现场实测指标数据的变化趋势基本相同,仿真曲线与实测曲线在较大部分尤其是指标极值区域具有较好的吻合度。由图9(b)可知,按照机组实际运行的导叶关闭规律,水泵断电过渡过程轨迹经历水泵区、水泵制动区、水轮机工况区及小部分的水轮机制动区,轨迹线虽然跨越工况恶劣的驼峰区和反“S”区,但表2所示的仿真计算结果与实测值吻合度仍然较高,验证了RAECM模型的有效性和稳定性。
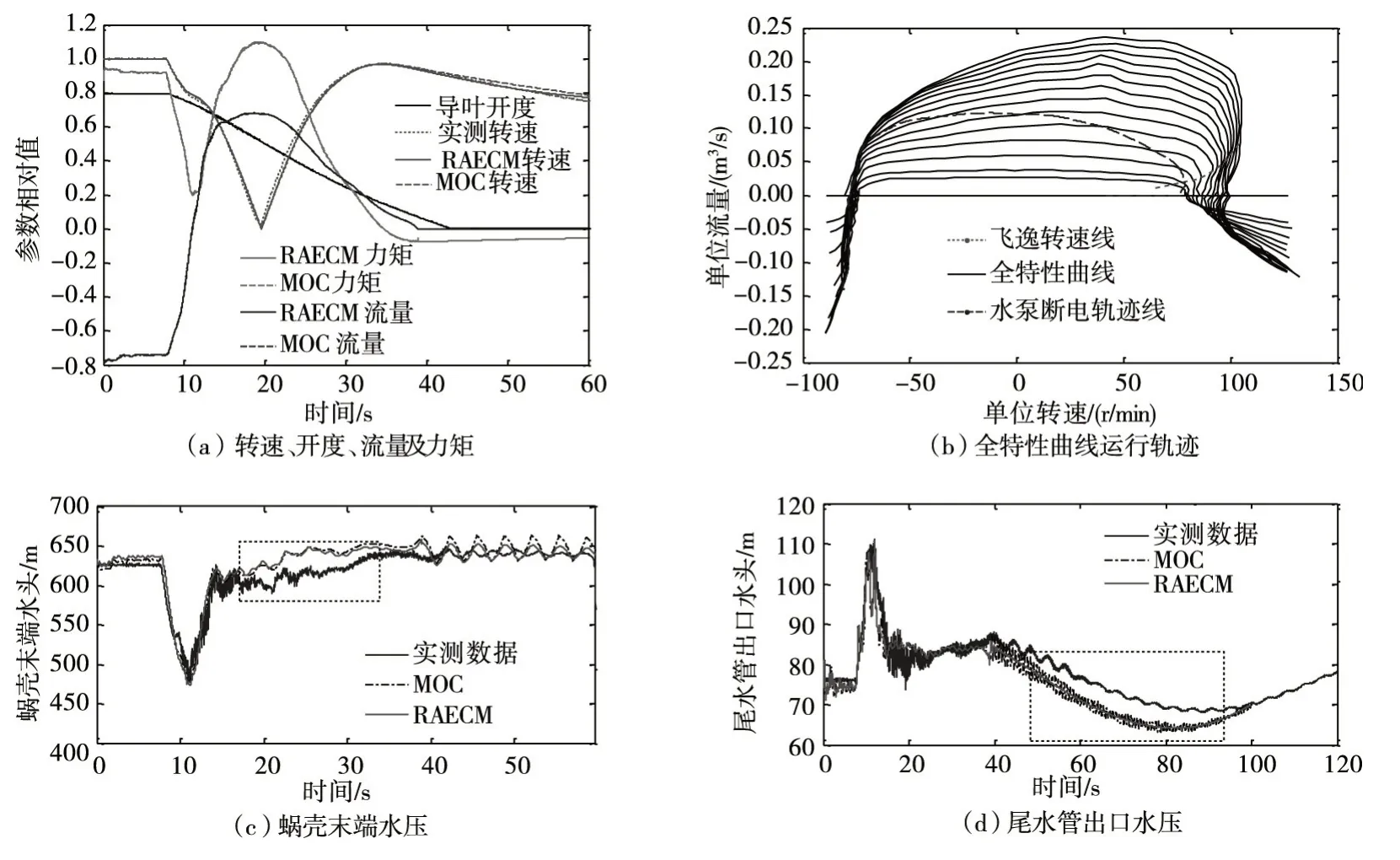
图9 水泵断电工况各动态指标变化曲线对比
由图9(c)(d)可知,对比现场实测数据,RAECM 模型与MOC 模型的参数变化曲线更为接近,两种仿真模型计算结果与实测数据相比,虽然误差在允许范围之内,但是在某些地方仍存在差异(图9(c)中虚线框内),分析原因如下:(1)水泵水轮机模型试验资料和真实机组特性之间差异;(2)仿真模型中有压输水系统的参数,如管道糙率、水击波速、摩阻系数与真实水道系统存在差异;(3)导叶关闭后,真实机组运行过程中尾水管湍流可能会导致实测值与仿真值在极值和变化过程上存在差异。值得指出的是,在42.8 s导叶全关之后,MOC 模型仿真的蜗壳末端水头和尾水管出口水头出现了不衰减的水压振荡,而RAECM 模型由于采用了稳定域更广的隐式RadauⅡA 法求解,压力振荡呈逐渐衰减状态,与现场实测曲线更加吻合。

表2 水泵断电工况各动态指标参数对比表
5.2 开机及空载运行工况抽水蓄能电站输水管道较常规电站复杂,且空载工况下机组运行远离设计工况点,转轮区可能产生的水压和力矩脉动会影响运行稳定性,对机组并网产生不利影响。因此,RAECM模型除了满足大波动工况下计算要求外,还需满足电站小波动工况运行稳定性。
根据抽水蓄能电站低水头开机至空载工况的实际运行参数,设置上库水位729 m,下库水位169 m,空载开度为18.4%,机组转速达到90%额定转速时切入PID控制。如图10所示,相同运行参数设置下,RAECM模型和MOC模型的空载开机工况仿真结果吻合较好,各动态指标能准确反映机组实际运行状态。由图10(b)所示RAECM模型空载开机工况下机组全特性运行轨迹可知,当调速器切入PID 控制,机组短暂跨越飞逸转速线后被立刻拉回,并逐步稳定在并网工况点附近。为验证RAECM模型空载工况稳定性,绘制球阀后水压变化曲线并分别与现场实测数据及MOC仿真结果对比如图10(c),水压特征参数如表3,滤除数据采集噪声,实测球阀后水压处于波动状态,RAECM模型的变化曲线与现场实测数据基本吻合,相比MOC 模型,RAECM 模型的水头波动裕度更大。为验证RAECM模型空载运行的电能质量,绘制空载稳定后机组转速曲线并与实测数据及线性模型仿真曲线对比如图10(d),刚性水击模型的转速相对值为1 并保持绝对稳定,RAECM 模型考虑了电站输水系统实际管路布置形式、水体及管壁弹性、水流摩擦损失等水力因素对机组转速的影响,其转速变化曲线波动状态与实测数据更加吻合,能反应机组空载运行的真实情况。表3 所示空载稳定工况下,RAECM模型的机组转速摆动相对值为±0.3%,满足国标规定并网同期带(+1%~-0.5%)要求。
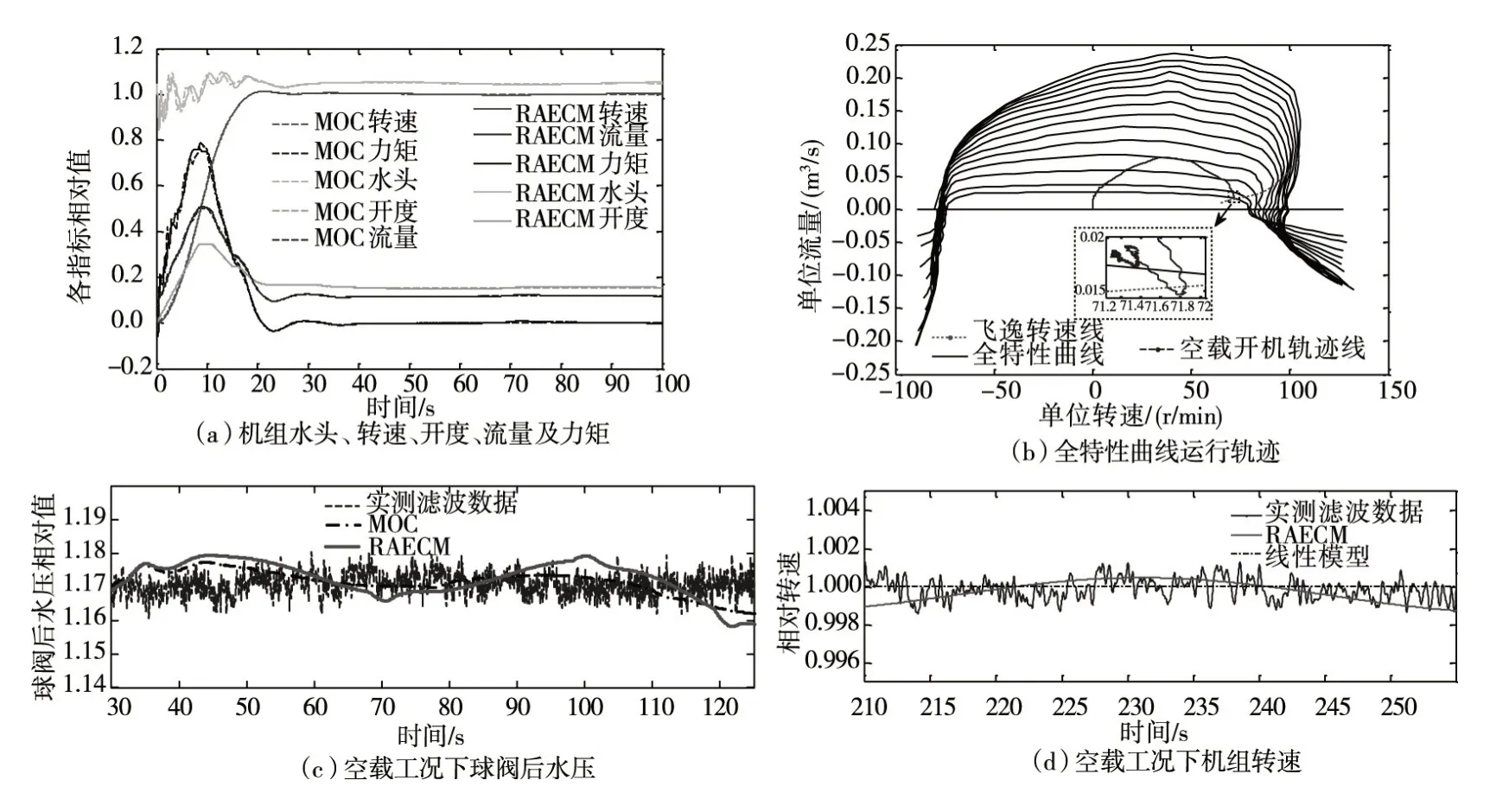
图10 开机至空载工况各动态指标变化曲线对比
5.3 模型时间复杂度分析及实时性验证RAECM模型的时间复杂度主要源于流量-转速二维动态嵌套迭代,全流道系统各节点处的水头、流量求解和更新。流量-转速迭代的时间复杂度为其中j 为仿真总步数、s 为流量迭代步数、k 为转速迭代步数,s 和k 值较小,因而较小。水头、流量求解和更新的时间复杂度为其中N 为管路分段数。如前所述,MOC 受库朗条件制约,管路分段较多,较大,而RAECM通过时空离散合理增加dT,使得O( jN )减小,大大提高了模型的求解效率。

表3 空载稳定工况各动态指标参数对比表
如图11 所示,基于RAECM 模型的抽水蓄能机组仿真测试装置,在装置每一步采样计算中,从调速器导叶开度信号输入到RAECM模型,由模型计算并输出机组转速到调速器的时间为模型单位运算时间。计算每一步采样的RAECM模型运算时间,共计15000步,取平均值即可得到模型的平均单位运算时间为2.2 ms。在工程应用中,常以一个工频周期20 ms确定采样时间间隔或调节周期,因此RAECM模型完全满足工程应用实时仿真需求。
5.4 工程应用抽水蓄能机组RAECM 模型能协调仿真效率与计算精度之间的关系,其工程应用价值主要体现在以下3个方面:
(1)基于RAECM模型的抽水蓄能机组仿真测试装置由DSP芯片和全隔离集成阵列器件组成,经I/O接口与电站调速器相连,可以作为“数字机组”进行调速系统所有工况的动态实时仿真试验,在实际应用中取得了满意效果。
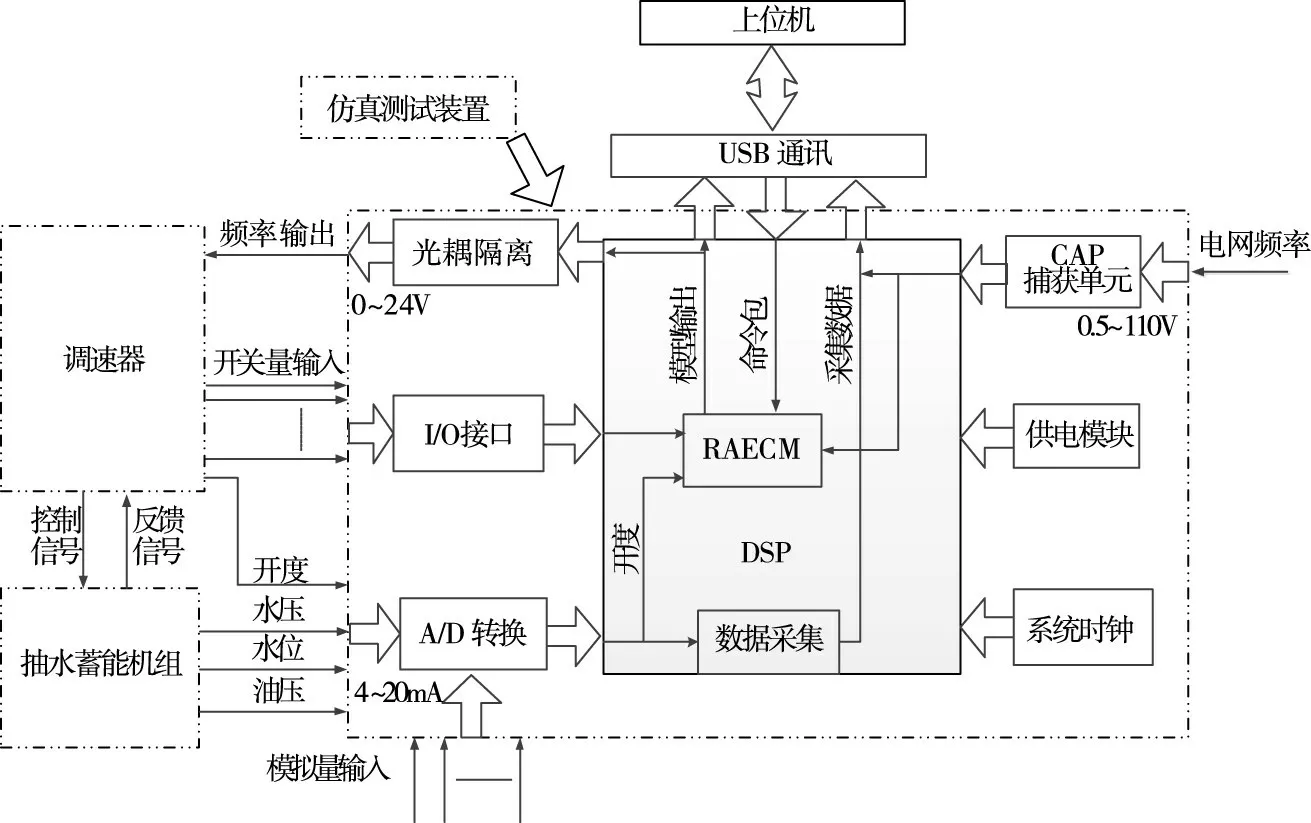
图11 RAECM在抽水蓄能机组嵌入式仿真的应用示意图
(2)与智能优化算法结合,可应用于抽水蓄能机组控制优化中,包括导叶关闭规律优化及调速器控制参数整定。RAECM模型能准确反映真实机组各工况下的瞬态过程,能保证优化结果直接应用于工程实际。模型的高效求解可以大幅缩短优化时间,节约计算资源。
(3)RAECM还可用于抽水蓄能机组模型参数辨识及抽水蓄能机组预测控制器的预测模型开发中。
6 结论
针对现有抽水蓄能机组建模不能同时兼顾计算精度和仿真效率的问题,本文提出了基于电路等效理论的实时精细化模型。依据电站输水管道实际布置形式,建立了等效电路拓扑网络,通过变尺度时空离散分析,提高了仿真效率;提出了改进Suter变换-BP神经网络水泵水轮机模型,改善了插值精度,采用了隐式RadauⅡA法对离散后拓扑网络的隐式常微分方程组进行求解,并推导了水头修正公式,保证了模型精度。主要结论如下:
(1)本文提出的抽水蓄能机组RAECM模型在保证计算精度的前提下,能有效提高仿真效率;既能准确描述大波动工况下各动态指标瞬变过程,又能保证空载工况下机组运行稳定性。
(2)RAECM模型采用稳定域更广的隐式RadauⅡA法求解,相比MOC模型,在极端工况下求得的水压变化值与实测值更接近,其求解稳定性更佳。
(3)将RAECM模型用于半实物仿真测试装置中,可以实时模拟真实机组过渡过程中各动态指标变化,有助于降低电站试验成本和运行风险,具有较好的工程应用价值。
(4)RAECM 模型能有效协调计算精度和仿真效率之间的关系,可为抽水蓄能机组控制参数寻优及导叶控制规律优化提供新的模型参考。
致谢:衷心感谢南方电网调峰调频发电有限公司研究生工作站对本论文的支持。
