一种基于路缘特征的点云道路边界提取方法
2019-05-17马新江刘如飞蔡永宁王鹏
马新江,刘如飞,蔡永宁,王鹏
(1.山东科技大学 测绘科学与工程学院,山东 青岛 266590;2.济南市勘察测绘研究院,济南 250101)
0 引言
准确和高精度的道路信息在“智慧城市”的建设过程中具有举足轻重的地位,随着城乡建设的飞速发展,道路交通网越来越密集,高效地获取和更新道路信息成为亟待解决的问题[1-2]。道路信息采集方式主要包括传统的人工测量和遥感影像。传统人工测量方法需要大量的人力物力且耗时长,已经逐渐无法满足城市建设和管理的需要;高分遥感影像虽然提高了时间分辨率,但仍不能实时获取,难以满足人们对道路数据低成本、高实时性的要求[3-4]。车载移动激光扫描系统作为一种新的空间数据采集方式,具有实时、动态、主动、高精度和高密度等特点,能够快速地采集大面积的三维空间数据和获取地物的表面信息[5-6],为获取道路信息提供了高精度的数据源。
点云数据是一种高精度、高密度的离散点数据集合。点云结构化是通过特征识别,从点云中提取具有特征结构的点云目标。道路边界点云是道路边界位置的特征点数据,对道路三维重建、路网矢量化等具有重要意义。如何从复杂道路环境中,准确自动提取出道路边界点云,仍然是目前研究的重点。
现有研究中,史文中等[6]提出了利用投影点密度(density of projected points,DoPP)对车载激光扫描距离图像进行分割,通过分析不同地物的投影点密度差异区分不同目标;Abuhadrous等[7]统计点云的高度直方图对路面信息进行提取,再利用路面宽度和曲率对提取的道路结果进行优化;Jaakkola等[8]将点云生成基于高程信息的特征图像,利用高程阈值提取路缘石;Zhang[9]对地表表面小的高度跃迁点进行检测,从而确定路缘石位置;马浩等[10]首先利用高程信息过滤掉地面点,然后利用梯度滤波和邻域取低点等处理获取道路边界点;Zhou等[11]利用滤波器提取每条扫描线的道路点云,之后利用变换检测提取垂直分布的点作为路坎点;Yang等[12]根据扫描点的GPS时间和角度得到扫描线,利用扫描线上激光点的高程差异、扫描点密度和累计坡度,对路坎点进行提取。
上述提取道路边界的方法大体可分为三类:一是基于投影点密度法,加入高程等辅助条件进行道路边界提取或分类,该方法具有偶然性,提取出的道路边界精细化程度有待提高;二是借助高程或坡度等信息,设置阈值等条件对道路边界进行提取,如何自适应地确定分类阈值是该类方法需要改进的方面;三是利用扫描线上点的分布特征对边界进行提取,虽然该类方法取得了一定效果,但是获取扫描线的过程比较繁琐。
第二类方法利用固定的特征条件进行道路边界提取,稳健性相对较好,计算量相对较少;而且,城市道路一般在设计上都要有路缘石,高度在一定的范围内[13]。综合以上分析,本文针对存在路缘石的一般城市道路,在上述第二类方法研究的基础上,充分挖掘路缘石及其邻近地物的空间邻域特征,构建路缘石特征描述算子,进行道路边界提取。
1 道路边界提取方法
首先,根据原始点云数据投影范围建立规则格网,将点云垂直投影到XOY平面;然后进行高程过滤,剔除过高的点,保留近地面点;之后通过分析道路边界路缘石的空间邻域特征,构建路缘石特征描述算子,用于提取道路边界;最后,经过聚类去噪,得到精确的道路边界。该方法的流程图如图1所示。

图1 算法流程图
1.1 点云格网化
根据投影范围建立C列R行的规则格网,并对格网进行编号,将车载点云数据垂直投影到XOY平面。点云格网化示意图如图2所示。

图2 点云格网化示意图
1.2 高程过滤
移动测量系统获取的原始点云数据包括路面、路缘石、植被、车辆、交通附属设施和建筑物等,投影到XOY平面后,树冠等过高地物点云会对道路边界点云造成遮挡,因此需要对点云进行高程过滤。文献[13]中规定路缘石一般高出路面10~20 cm,因此首先将点云数据分块,然后以路面点为基准,去除移动测量系统车行轨迹点以上50 cm的点云,保留路面、路缘石和低矮植被等点云,避免树冠、路灯或指示牌等过高地物对道路边界的遮挡。
1.3 路缘石特征描述算子
通过分析道路边界地物的空间位置分布(图3)可知,①在道路横断面方向,路缘石具有“单侧连续性”。路缘石的某一侧是路面,路面分布连续,高程较低且起伏变化小,路面与路缘石的高差在固定范围[13]内;路缘石的另一侧分布着低矮植被等,分布散乱,高程较大且起伏较大。②在车辆行驶方向,路缘石具有“连续分布性”。路缘石呈直线或弧形,局部连续分布,相邻路缘石的高程基本相同。图4为图3中A~F部分的局部放大图,分别展示了直线和弯曲部分的路缘石边界特征。
电影《宝贝儿》整体就是一个冲突不断,充满着矛盾的主体与结构,它以拯救孩子坚持还是放弃作为发展主线,实质上是江萌内心本我与超我的追求与融合。主人公江萌对内面临的是自我角色的混乱,是自我身份的认同与拯救,对外是对家的认定、对社会秩序的认定。江萌通过各种方式去挽救孩子是精神分析中超我的表现。“超我是人格中的最道德的部分,代表良心、自我理想,处于人格的最高层,它按照至善原则行事。”[7]而真正推动江萌去行动的是内心潜意识的本我,它不是一种自私,而是一种回归,一种对生的渴望。

注:左右两侧的线代表花坛道路边界;中间的线代表道路中央护栏。图3 道路示意图
为了便于对地物进行描述,取格网内点的高程最大值为格网值。利用路缘石的“单侧连续性”和“连续分布性”,分别在道路横断面方向和车辆行驶方向,用3×3移动判别窗口对原始点云格网进行判断。如图5所示,若某格网同时满足判断原则A和B,则认为该格网是路缘石格网。
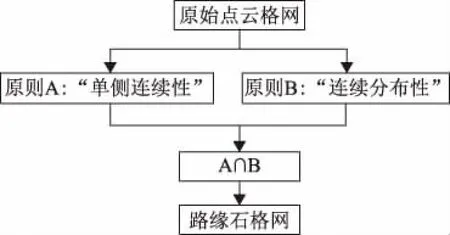
图5 路缘石格网判断流程
1)判断原则A。在道路横断面方向判断“单侧连续性”,首先计算中心格网与邻域格网的高程差值Δh,规范中规定路缘石一般高出路面10~20 cm[13],考虑到道路长时间使用,可能会造成路面下陷的影响,将路缘石高度扩大。若Δh在10~25 cm之间,则该中心网格与邻域格网符合路缘石与路面的高差特性;然后计算相邻邻域格网的最大个数N和坡度slope,若slope小于阈值Δs,且N在N1与N2之间,则认为该中心格网可能是路缘石格网。
(1)
式中:H0是中心格网值,Hi是邻域格网值;Hm和Hm+1是相邻邻域格网值,Dside是格网边长。N1、N2是相邻邻域格网数量的范围,在道路边界处的3×3移动判别窗口内,N的数量即为路面格网的数量,理想情况下N的值为3,但是考虑到道路与坐标轴并非平行和部分路缘石呈弧形走向,且通过图4可以看出,N的取值可能为2、3、4,因此设置N1=2,N2=4。
2)判断原则B。在车辆行驶方向上判断“连续分布性”,首先计算邻域格网与中心格网的坡度slope,若slope小于阈值Δs,则标记邻域格网;然后以中心格网的中心点为顶点P,计算P与标记的邻域格网中心点构成的角度最大值αmax。路缘石在车辆行驶方向一般为直线走向或弧形走向,在局部范围内大致呈直线分布,且通过图4可以看出,图4(b)中αmax等于135°,其余图中的αmax等于180°。因此,若αmax等于135°或180°,则认为该中心格网可能是路缘石格网。
(2)
式中:H0是中心格网值,Hi是邻域格网值,Dside是格网边长;a和b是中心格网点指向邻域格网中点的向量。
将满足判断原则A和B的格网集做交运算,得到路缘石格网。
1.4 聚类去噪
通过以上运算可以得到一系列的路缘石格网。但是,由于道路中央护栏及花坛内植被等与路缘石特征相似的存在,提取出的路缘石格网会有伪边界格网。本文根据路缘石在行车方向上的连续分布性,对路缘石格网进行聚类去噪。
1)聚类。因为路缘石格网在局部范围内是连续分布的,且呈直线或弧形。因此,本文以一路缘石格网为起始格网,以邻域格网数量和角度作为聚类条件,数量或角度不符合直线和弧形特征时停止聚类。然后以停止的边界格网为起始格网,开始新的聚类生长。
经过上述聚类去噪后,得到最终的路缘石格网。然后根据式(3)计算路缘石格网内高程中值hmid,取格网内高程在[T1,T2]范围的点作为输出的道路边界点云。
(3)
式中:hmax和hmin是路缘石格网内点的高程最大值和最小值;ΔH是路缘石格网内点的高程最大差值;T1和T2是格网内输出点云的高程范围。
2 实验与分析
2.1 实验数据
本文实验数据由青岛秀山移动测量有限公司的VSurs-E型移动测量系统采集获得,该系统以汽车为载体,高度集成了GNSS接收机、惯性导航系统、三维激光扫描仪和全景相机等先进传感器;扫描仪每秒可以采集100万个点,扫描范围为0.3~119 m,测距精度达到1 mm,角度分辨率为0.008 8°,测角精度为0.02°;在100 m的测距范围内,该系统的点位精度优于10 cm。
使用该系统对某区域进行扫描,扫描区域包括道路、绿化带、行道树、交通附属设施和车辆等。道路为双向六车道,长度约为500 m,路面宽度约为23 m。作业时扫描车沿行驶方向在道路中央进行扫描,距离道路边界6 m左右,扫描时车速35 km/h,扫描仪转速200 Hz,结合车速与扫描仪转速得出扫描线间隔0.049 cm左右;根据扫描车到路缘石距离以及扫描仪角度分辨率,计算出路缘石处扫描线上点间隔约为1 cm。按照相关道路设计规范[13],路缘石最小高度为10 cm,为提高数据传输速度和算法处理效率,保留路缘石特征,利用最小距离法对点云数据进行抽稀,扫描线上抽稀点间隔为5 cm。结合扫描线间隔以及抽稀点间隔,最终实验数据点云间隔约为5 cm。图6为实验数据,图7为道路剖面。

图6 实验数据

图7 道路剖面
2.2 实验结果
本文算法需要设置的参数为:格网边长Dside、坡度阈值Δs和聚类阈值N0。对于点间隔不同的点云数据,参数可根据点云间隔做适当调整,具体原则如下:
①格网边长一般为点云间隔的2~3倍,以保证路缘石格网内有可以被输出的道路边界点,若格网内点数过少,则无法根据式(3)输出道路边界点。若点云间隔或格网边长过大,则会丢失路缘石特征,造成提取结果不完整。
②坡度阈值为相邻同类地物格网的高差与格网边长的比值。路面或路缘石等同类地物在局部范围内较平坦,高程几乎相同,高差一般在3 cm内。
③聚类阈值应大于格网边长,以单块路缘石长度作为阈值参考。
针对本文实验数据,考虑到以上三点,设置格网边长Dside=0.1 m,坡度阈值Δs =0.3,聚类阈值N0=0.5 m,得到如图8、图9和图10所示的实验结果。
为验证本文方法的有效性,将未经聚类去噪的道路边界点云输出,如图8所示。可以看出,本文方法可以有效地提取道路边界;但同时存在噪点,在排列整齐的道路中央护栏下方的底座和分布在道路边界外侧的低矮植被位置,目标局部点云的空间分布和几何特征与路缘石相似,导致错误提取。这一类噪声表现为离散分布。因此本文通过聚类去噪,将零星的噪点剔除,保留完整准确的道路边界点。图9为经过聚类去噪后,道路边界的最终提取结果。
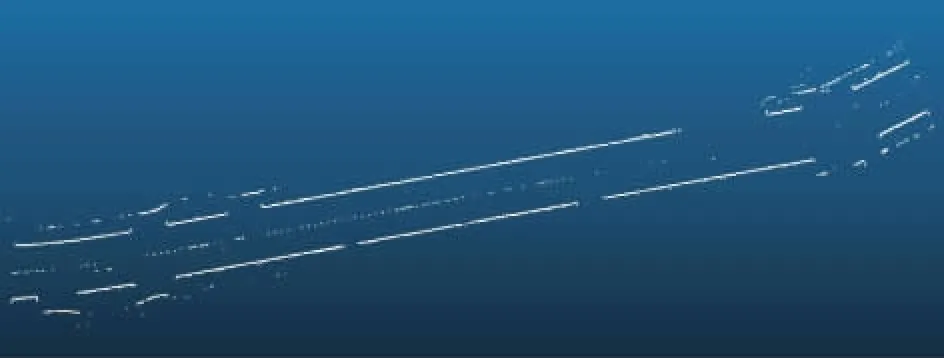
图8 道路边界初始提取结果

图9 道路边界最终提取结果

图10 局部放大叠加显示示意图
图10为高程过滤后的点云数据与最终提取结果叠加显示效果图以及局部放大图,红色为提取出的道路边界点云。可以看出,对于存在路缘石的一般城市道路,本文方法可以准确地提取道路边界,边界点排列整齐,轮廓清晰简洁,直线道路和弯曲的花坛坛头的边界点基本被保留下来,可以很好地贴合路缘石立面。同时,从图10的a、c和d区域可以看到存在少量边界点漏提的情况,主要是因为点云密度稀疏和道路边界下陷,以及聚类去噪过程中,部分边界格网集合数量小于设定的阈值,导致局部点云与实验参数不符,造成漏提的情况。
2.3 实验结果比较分析
为验证本文方法的有效性和准确性,选取部分路段,分别用本文方法与格网高差法提取道路边界进行比较。
图11为2种方法未进行聚类去噪的初始提取结果,图11(a)为格网高差法初始提取结果,图11(b)为本文方法初始提取结果。从图中可以看出,2种方法都可以将道路边界提取出来,同时会将道路中央护栏底座和花坛外侧的低矮植被等地物提取出来,存在较多噪点。但是,如图11中的A区域所示,本文方法提取出的道路边界噪点相对较少,完整性更高;如图11中的B区域所示,在点云稀疏的边界位置,本文方法可以较为完整地提取道路边界。这是因为本文方法在利用路缘石与路面高差的同时,考虑路缘石与其周围地物的空间分布关系,所以提取出的道路边界效果更好,准确性更高。
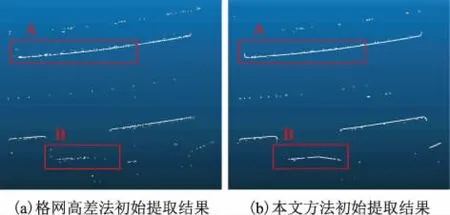
图11 2种方法初始提取结果
图12为2种方法进行聚类去噪之后的最终提取结果,图12(a)为格网高差法最终提取结果,图12(b)为本文方法最终提取结果。由图12中A、B、C区域可知,通过聚类去噪后,本文方法的道路边界提取效果较好,花坛坛头和点云稀疏位置的道路边界可以提取出来,完整率较高。

图12 2种方法最终提取结果
但正因为本文方法考虑了路缘石周围地物的空间分布关系,所以在部分点云非常稀疏的地方无法运用路缘石特征描述算子或者不满足聚类条件,从而出现类似图12(b) A、B区域中部分道路边界漏提的情况。
3 结束语
本文以车载激光扫描点云数据为研究对象,针对存在路缘石的城市道路,提出一种基于路缘特征的城市道路边界自动提取方法。通过分析路缘石的空间邻域特征,构建路缘石特征描述算子,利用路缘石及其邻近地物在道路横断面方向和车辆行驶方向的分布特征,结合城市道路规范,对道路边界进行提取。实验结果表明,对于直线和弧形的道路,该方法可以有效地提取道路边界,提取结果质量较高,可用于具有不同点云间隔的数据,适用性较强。但本文算法的部分参数(如聚类阈值)依赖人工经验,自适应性有待研究。本文所做研究是点云数据分类识别的一部分,为道路模型重建和路网矢量化等打下了重要基础,后续工作将重点研究无路缘石的道路边界结构化提取。
