集装箱轨道动力平车通信系统构建研究
2019-05-17黄泽星
黄泽星 龚 雪
(中铁武汉勘察设计研究院有限公司,武汉 430074)
1 概述
集装箱轨道动力平车是一种自带动力并运行于铁路轨道上,具有实时定位、自动驾驶、自动连挂等功能的轨道平板车辆,车体可装载两个20 英尺集装箱或一个40 英尺集装箱。它是集合铁路动车、铁路集装箱平车车辆、自动驾驶港口集卡车、港口集装箱自动运输车AGV 的技术优点进行创新而产生的轨道运输工具。
集装箱轨道动力平车由车载计算机控制系统、车体结构系统、走行系统、制动系统、动力及牵引系统(简称动力系统)、定位系统、装载状态检测及箱号识别系统(简称装载状态检测系统)、运行模式控制系统、通信系统和相关传感器和电气接口组成。它可以通过单车或组车的方式运行,其通信不与铁路既有通信网(包括有线通信、450 MHz 无线列车调度通信系统、GSM-R 无线通信系统、站场无线通信系统等)相连,自形成独立的专用通信系统,主要以无线通信WLAN 或LTE 等方式存在。
2 集装箱轨道动力平车通信系统总体结构
集装箱轨道动力平车通信系统采用车-地通信、车-车通信和车载互联网3 种通信技术组合方法,解决轨道动力平车在不同工作状态下对外的控制与状态数据传输问题,采用车载内部总线技术方法,解决轨道动力平车车载控制系统内部控制与状态数据传输。
该系统由自动控制中心、中心-车无线通信系统、车-车无线通信系统、轨道动力平车之间的车载互联网系统和轨道动力平车内部的车载内部总线系统组成。
1)自动控制中心设置无线通信核心网设备,包括处理信令的服务器,处理数据的服务器、交换设备等,自动控制中心发送工作指令、接受反馈报告;集装箱轨道动力平车每辆单车设置车载电台,用于接收控制中心发出的指令并反馈状态信息;站场及区间设置中继设备,满足全区间场强覆盖的需要。
2)中心-车无线通信系统用于连通铁路集装箱自动化控制系统控制中心与轨道动力平车之间控制数据和状态数据的传输,采用成熟的通用移动数据通信技术或铁路专用移动数据通信技术。
3)轨道动力平车之间的车-车无线通信系统用于车-车重联/解开过程中两车之间近距离控制信息的交换,车-车无线通信系统采用小区域以及近场通信等成熟技术。
4)车载互联网系统是一个有线互联网系统,用于轨道动力平车重联运行模式或列车运行模式时车与车之间的控制数据和状态数据的传输;当轨道动力平车重联或组成列车时,车载互联网随着电缆网络线的自动连接而自动连通。车载互联网也称列车总线。
车载内部总线用于连通车载控制系统与车载子系统之间的内部通信总线,车载总线是连通动力系统、走行系统、制动系统、车体结构系统、定位系统、装载状态检测系统、通信系统的通信总线,传输车载控制系统控制信息和设备状态的车载内部总线。
3 集装箱轨道动力平车通信方法
3.1 车-地通信
车-地无线通信子系统用于实现中心-车无线通信,即自动控制中心与轨道动力平车之间的通信,传输信息包括语音、数据、视频信息。为能够高速、实时地传送信息,可选用WLAN 或LTE(4G、5G)技术实现超大带宽的无线通信。通信方式选用无线天线、漏缆方式,由于港湾站或港区多为开放型空间、电磁环境相对单一、纯净,无线天线安装方便、可维护性高,可优先考虑无线天线覆盖方式,有遮挡或者信号传播受限的区域采用天线加漏缆方式,解决弱场问题。
1)单车运行模式下,每辆单车通过车载电台与自动控制中心独立通信。
2)重联运行模式下,主控车和尾车通过车载电台接受集装箱自动化控制系统指令,通过车载互联网(列车总线)向从控车下达运行控制指令;主控车、尾车在重联期间不间断向集装箱自动化控制系统报告执行进度和位置。从控车在重联期间处于静默状态,接收集装箱自动化控制系统呼叫,应答报告状态和位置。
3)列车运行模式下,牵引机车为主控车,主控车和尾车通过车载电台接受集装箱自动化控制系统指令,通过车载互联网(列车总线)向从控车下达运行控制指令;主控车、尾车在列车运行模式期间不间断向集装箱自动化控制系统报告执行进度和位置。从控车在列车运行模式期间处于静默状态,接收集装箱自动化控制系统呼叫,应答报告状态和位置。
3.2 车-车通信
车辆重联/解开过程中车与车之间的通信尤为重要。在重联或列车运行模式下,参与通信的单车数量一般较多,多车之间有“多对多”、“一对一”两种通信方式。
1)“多对多”通信:集装箱轨道动力平车主控车与线路上所有其他接收到重联命令的运行单车建立车-车通信。这种通信方式存在广播风暴问题严重,通信时延大等缺陷,不能满足列控系统要求。
2)“一对一”通信:通过中心-车无线通信系统接收到重联命令的单车与准备连挂车(前车)建立车-车通信,这种通信方式能够较好满足现阶段集装箱轨道动力平车车辆间通信需求。
上述前车判定过程为:单车根据集装箱自动化控制中心提供的连接指令(包括各待连接车辆的车号和通信地址等信息),并结合定位子系统给出的绝对位置,轮询接收到连接指令的其余轨道动力平车的位置和运行方向,根据连接指令的其余轨道动力平车的运行方向和距离关系,判定唯一前车,通过前车的通信地址与其建立近场通信;或是直接与前方的邻近车辆建立近场通信,获得该邻近车辆的车号,判断连接指令中是否包含邻近车辆的车号。若包含,则判定邻近车辆为唯一前车;若不包含,则继续运行至该邻近车辆的前方,继续执行直接与前方的邻近车辆建立近场通信的步骤,直至判定出前车。
以三车通信(不包含主控车)为例,说明多车情况下车-车通信的建立流程,如图1 所示。

图1 三车通信示意图Fig.1 Schematic diagram of three container rail powered flat cars communication
三辆轨道动力平车分别为单车1、单车2 和单车3。三辆单车均收到集装箱自动化控制中心发送的连接指令,连接指令包括待连接车辆的车号和通信地址号。对于单车1 判定前车的过程为:确定运行方向为直线方向,根据连接指令确定待连接车辆为单车2 和单车3,轮询单车2 和单车3,获得单车2 和单车3 的位置和运行方向,根据自身定位子系统提供的自身位置,确定运行方向前方最近车辆为单车2,则判定单车2 为前车;对于单车2,可以采用同样的方法判定单车3 为唯一前车。在正确进行前车判定后,单车1 通过单车2 的通信地址呼叫前车,单车2 若确认待连接车辆(单车1)的通信地址包含于连接指令中,则无条件应答,从而单车1与单车2 保持一对一通信,互相交换单车位置、速度等信息,使单车1 可以缓慢接近单车2,直至车辆连接。在车钩连接成功后,双方锁闭自动车钩,连接动力电源通道和车载互联网通道,关闭近场通信和相对定位子系统,完成重联。
重联/列车状态下,控制中心与主控车和尾车保持通信,其他车由于被判别为从控车,其车载通信系统听从主控车列车总线的通信控制。从控车仅在控制中心呼叫时给予通信响应,报告自身状态和位置。
重联车辆解开过程,如图2 所示。具体为:轨道动力平车接收到集装箱自动化控制中心发送的解开指令(包括车号和通信地址等信息)后,确定具有解开指令中车号且与该轨道动力平车相连的轨道动力平车为待解开车辆,通过车载互联网通知待解开车辆打开与该轨道动力平车连接的车钩,从而使双方车钩断开连接。在车钩断开连接后,两车建立车-车无线通信,通过车-车无线通信判定两车相对位置,直到双方车载控制系统确认重联解开,双方关闭车-车通信。双方向控制中心报告重联解开。

图2 重联车辆解开过程示意图Fig.2 Schematic diagram of unlocking process of reconnected container rail powered flat cars
3.3 车载互联网通信
车载互联网通信即为列车总线通信。集装箱轨道动力平车装载动力系统、走行系统、制动系统、车体结构系统、定位系统、装载状态检测系统、通信系统等设备,存在着大量的设备控制信息,对信息传输的安全性及可靠性要求很高。若采用传统的布线方式,会使得系统十分复杂,而且可靠性降低,因此采用总线方式来进行信号传输。
车载总线系统由列车总线网络和车辆总线网络2 个二级子网组成。车辆总线负责将车厢内的各种设备连接起来,列车总线则将一列车的各个车辆连在一起。列车总线由于监控对象多、通信量大,且单车需经常重联、解开,对网络的传输速率、拓扑性、通信量有较高的要求,采用以太网技术实现。
1)单车运行模式下,车辆总线连接单车车厢的各子系统设备通信接口,解决单车内部各种设备之间的通信,满足车辆及标准数据通信的需求。车辆总线由每辆单车内固定安装的电缆及通信节点互联而成,每辆车设有一个通信节点,重联或组成列车时,车辆总线通过通信节点与列车总线交换信息,如图3 所示。

图3 车辆总线实现方式Fig.3 Implementation of vehicle bus
2)重联或组成列车时,列车总线连接不同单车的通信节点,使整列集装箱轨道动力平车组成一个网络,即车载互联网(以太网)。具体实现方式为主控车与从控车根据集装箱自动化控制中心指令进行重联,重联成功,车体系统锁闭自动车钩,不同单车的列车总线通过预留接口连接成为一个整体。车载互联网用于传输车与车之间的控制数据和状态数据,如图4 所示。
重联或组成列车时,车组在一次运行中有且只有一个控制列车总线工作的主控制节点,位于主控车,车辆总线用以连接列车总线通信节点和该节点所在车内的各种设备。集装箱轨道动力平车的车载设备接收通信节点命令,将各种信息按一定的格式送往通信节点,从节点则将各设备送来的信息重新编排,按照主控制节点的命令,按顺序发往主控制节点。通信节点的功能类似于网关,能够实现车辆总线与列车总线的协议转换。通过通信节点,总线才能实现正常工作,完成对整组车的控制、检测和诊断等信息传输。
4 技术效果
本系统采用中心-车无线通信、车-车无线通信、车载互联网(列车总线)和车辆总线组合的通信方式,满足轨道动力平车在不同状态下的通信需求。
1)轨道动力平车与集装箱自动化控制中心之间采用无线通信。
2)轨道动力平车后车未与前车连接,轨道动力平车与前车之间采用近场通信。
3)各轨道动力平车已连接,轨道动力平车之间采用以太网通信。
5 结束语
不同设备之间以及不同运行状态下的轨道动力平车之间均采用不同的通信方式,解决在不同作业方式下的通信可靠性和防干扰措施,提高了系统的可用性。根据集装箱自动化控制中心下发的工作指令,在需要进行车钩连接/断开时打开近场通信,避免车钩错误连接和错误解开,也避免各轨道动力平车之间通信的相互干扰,提高通信的可靠性。
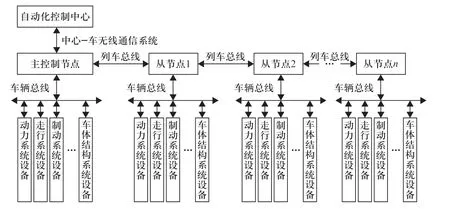
图4 列车总线实现方式Fig.4 Implementation of train bus
