一种轨道车车号与集装箱箱号自动关联的方法
2019-05-17黄瑞
黄 瑞
(中铁武汉勘察设计研究院有限公司,武汉 430074)
1 概述
集装箱多式联运具有产业链长、高效快捷、集约经济、安全可靠等优势,是货物运输发展的重要方向。集装箱是运输货物的载体,集装箱箱号是集装箱型号、容积、产权企业、序号码的集合,在全球集装箱运输体系中是唯一代码。在运输体系中集装箱箱号是货物运输起点、目的地、货物类型、数量、重量、集装箱尺寸的唯一代码。集装箱铁路运输货物中铁路集装箱站、铁水联运铁路港湾站或专用线货区(港区)集装箱装车后,需要以车辆作为载体加入铁路运输流程,铁路车辆的车号在后续货票、运输过程中作为代码进行作业流程和交接作业的基础信息。因此集装箱箱号和铁路运输车辆车号的关联是一个非常重要的作业内容。
到达铁路集装箱站、铁水联运铁路港湾站集装箱列车,卸车作业时铁路车辆车号需要解除关联;进行倒装法解体/编组列车作业时,倒装到另一台铁路车辆(驳接车辆)时,需要集装箱箱号与倒装车辆车号进行关联。
一个铁路港湾站连接多个集装箱货区(港区)铁路专用线时,到达的集装箱列车车辆集装箱目的地方向组号随机分布,无法满足多处专用线货区(港区)装卸堆场依次快速送达的要求,需要对到达的集装箱进行按组号分组。在分组过程中集装箱箱号需要与驳接车辆车号进行关联;
目前这种作业方式均采用人工现场进行记录、核对,作业时间较长,集装箱的装卸、倒装、中转作业效率不高。
2 系统的结构与功能
为了提高铁路集装箱列车装卸时集装箱箱号与轨道车辆车号关联的效率问题,本方案在基于集装箱动力平车中转倒装作业方式下,提出一种新型的列车车号与集装箱箱号自动关联方法,该方法采用图像识别技术(利用计算机对图像进行处理、分析和理解,以识别各种不同模式的目标和对像的技术。一般工业使用中,采用工业相机拍摄图片,然后再利用图像识别软件根据图片灰阶差做进一步识别处理,从而得出识别结果),通过对装载车辆车号和集装箱箱号识别、对比,从而进行关联,该方法适合一个铁路港湾站对应一个或多个集装箱货区(港区)情况下的集装箱装卸作业。
铁路车站的车号与箱号关联系统,是铁路车站自动化装卸系统的子系统(通过自动控制系统,来进行铁路车辆的识别、定位,装卸机具的定位、走行、吊装,集装箱的识别,驳接车辆的定位、运行等一系列操作,从而完成铁路集装箱的自动装卸),具有图像采集、自动识别、数据对比、数据交换等功能。车号与箱号关联系统与铁路集装箱货场管理系统(一种采用互联网信息化和计算机技术,管理集装箱装车、卸车、中转、交接物流作业,铁水联运,铁公联运的物流管理信息系统)有数据交换,用于铁路自动装卸作业中集装箱与车辆信息的自动关联,从而实现通过驳接车辆的车号信息查询集装箱的货位信息,为自动控制系统自动确定驳接车辆的行驶目的提供依据。该系统由图像采集子系统、图像识别子系统、数据对比子系统、数据交换子系统组成,如图1 所示。

图1 车号与箱号关联系统结构图Fig.1 Structure diagram of correlation system between rail car number and container number
图像采集子系统的功能是采用数字高清摄像机对集装箱箱号和轨道车车号进行拍照,光学图像通过数字化,形成数字图像,供计算机处理和保存。
图像识别子系统的功能是通过计算机算法对数字图像进行处理,提取图像特征并进行图像识别,将识别的图像结果转换为数据进行存储。
数据对比子系统的功能是对铁路自动化装卸系统提供的车号信息与当前识别的图像信息进行对比,如果对比信息一致,可自动进行下一步作业;如果对比信息不一致,则自动作业终止,请求人工核实。
数据交换子系统的功能是在集装箱的吊装过程中,根据车辆与集装箱装载状态关系,自动将最新的车辆车号与集装箱箱号进行绑定或取消绑定;在集装箱装卸前,数据交换子系统先从铁路集装箱货场管理系统接收箱号信息,在集装箱装卸完成后把最终的关联信息发送给铁路集装箱货场管理系统。
3 系统作业方法
系统设计方案如图2 所示。

图2 系统方案设计图Fig.2 System scheme design diagram
设计方案中,龙门吊可跨越多条股道,本次按三条股道为例进行说明。图2(a)中2 条股道为集装箱列车的装卸线,1 条股道为轨道平车(驳接车辆)走行线,龙门吊作业可把列车装卸线上列车的集装箱吊装到轨道平车走行线上的轨道平车,也可把轨道平车上的集装箱吊装到列车装卸线上的列车上。龙门吊吊臂各安装4 台摄像机,用于在吊臂抓取集装箱过程中抓拍集装箱顶部箱号和集装箱平板车侧面车号,摄像机均需采用外伸支架进行安装。当吊臂开始工作在集装箱正上方(定位、未抓取)时,摄像机先抓拍集装箱顶部的箱号图像,当吊臂抓取集装箱时,摄像机再抓拍集装箱侧面的箱号图像,并将两次抓拍的图像数据发送给图像识别子系统进行识别,并对识别的数据进行对比。
图2(b)为研究方法的立面布置图,摄像机通过外伸支架安装在吊臂两侧,吊臂在抓取集装箱时,摄像机对集装箱平板列车车号进行抓拍。
图2(c)是研究方法各设备位置关系图,股道线间距为5 m,为保证设备安全,摄像机距股道中心线2.5 m,集装箱宽度为2.13 m,摄像机距集装箱外边距离最大为1.435 m,集装箱高度为2.18 m,通过计算,摄像机与平板列车侧边车号角在29.1°到33.4°之间。
作业过程如图3,4,5 所示。
龙门吊移动到集装箱吊装位置,吊臂移动到集装箱正上方,摄像机开始对集装箱顶部箱号进行抓拍,图像识别系统对图片处理,识别箱号,并把箱号信息发送给集装箱管理信息系统进行确认,如图3 所示。在龙门吊吊臂抓取集装箱时,吊臂两侧的摄像机对平板列车两侧车号进行拍照,图像识别系统对图片处理,识别列车车号,通过对比自动化装卸系统发送的车号和箱号信息,确认信息一致后,系统对箱号和车号信息解除关联状态,解除关联状态信息发送给集装箱管理信息系统,如图4 所示。当龙门吊吊臂把抓取的集装箱放到倒装车辆上时,吊臂两侧的摄像机对倒装车辆两侧车号进行拍照,图像识别系统对图片处理,识别列车车号,并对箱号和车号信息进行关联,然后将关联信息发送给集装箱管理信息系统,如图5 所示。
方案作业流程如图6 所示。
4 小结
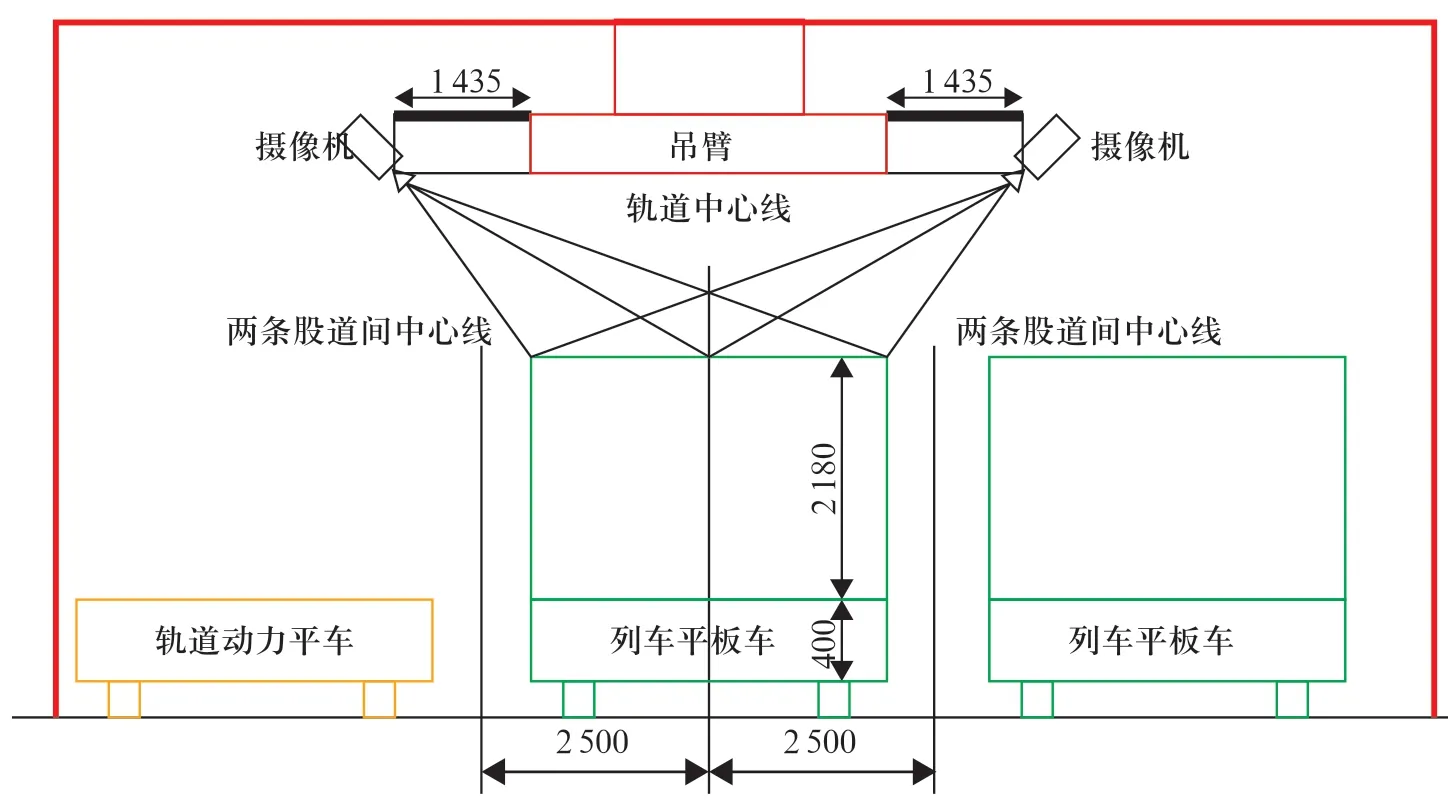
图3 系统对集装箱顶部箱号识别Fig.3 System recognition of container number on the top of the container
图4 系统对装载车辆车号识别Fig.4 Vehicle number identification
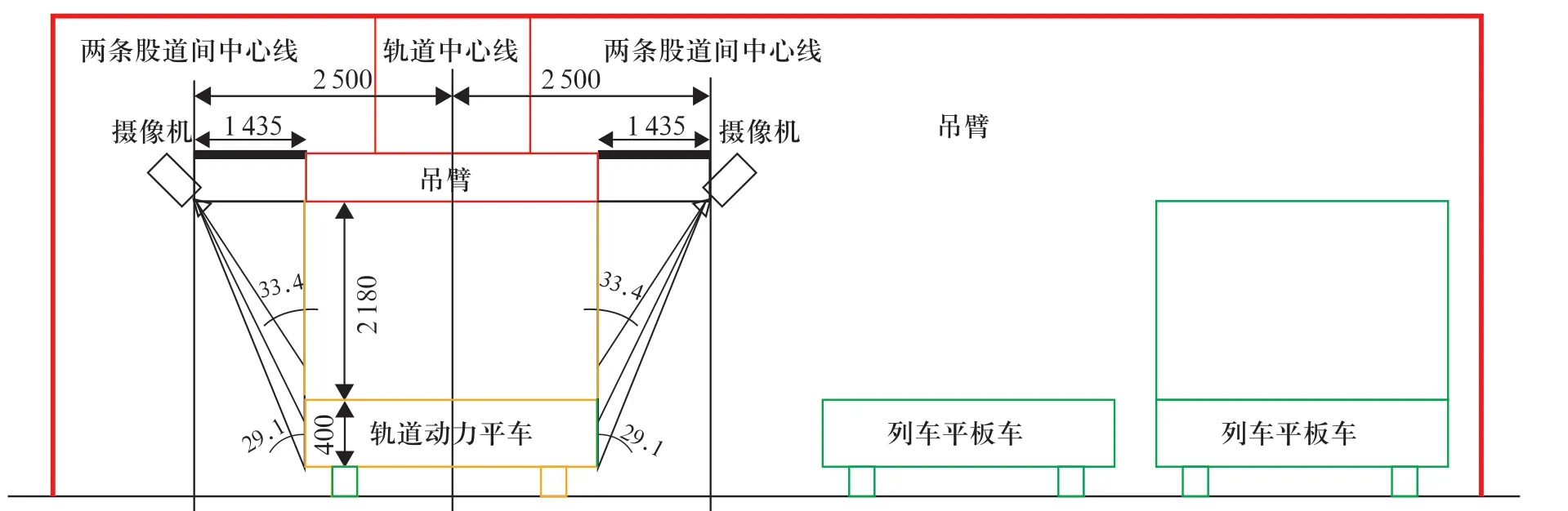
图5 系统对倒装车辆车号识别Fig.5 System recognition of loading car number

图6 方案作业流程图Fig.6 Flow chart of scheme operation
本研究方案是基于集装箱自动化装卸作业方式提出一种轨道车辆车号与集装箱箱号自动关联方法,该方法适用于铁路港湾站(一站多场)集装箱装卸中转作业中集装箱箱号与装载车辆(驳接车辆)的车号自动关联,从而实现自动化装卸系统自动确定装卸车辆的装卸货区。
本研究方案是利用图像采集系统、图像识别系统、数据处理系统等多项智能分析系统,通过与铁路自动化装卸系统、铁路集装箱货场管理信息系统进行数据交换,实现了集装箱在铁路车辆与其他车辆倒装过程中货物信息与车辆信息的自动关联。该方法使铁路集装箱列车的集装箱箱号与装卸车辆车号自动关联,代替目前的现场人工作业,提高了整个集装箱装卸作业的效率。
