基于FPGA的调频连续波合成孔径雷达实时成像处理方法
2019-05-15张力川顾鹏程全英汇
王 立,张力川,顾鹏程,全英汇
(1.西南电子技术研究所,四川 成都 610036;2.西安电子科技大学雷达信号处理国家重点实验室,陕西 西安 710071)
0 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)作为一种全天候、全天时的遥感系统,其发展已有五十多年的历史,现在已经广泛应用于民用和军事领域。SAR成像是对接收到的雷达回波信号进行二维匹配运算处理,还原目标的散射特性,从而获得灰度与不同散射特性几何分布相对应的可视图像。随着无人机(Unmanned Aerial Vehicle,UAV)的快速发展,对重量轻、体积小、功耗低的传感器系统需求越来越大,促使具有低截获(发射功率低)和性价比高等优势的调频连续波(Frequency-modulated Continuous-wave,FMCW)技术在小型SAR系统中得到广泛应用。FMCW系统采用接收信号与发射信号进行解线频调(Dechirping)处理,然后通过下变频转换到基带进行信号处理[1]。
随着半导体技术和集成微系统的快速发展,使得实现微型化的机载SAR实时处理成为可能。文献[2]中提出了一种可重构小型SAR系统,采用多块信号处理板并行处理,每块板卡集成现场可编程门阵列(Field Programmable Gate Array,FPGA)和数字信号处理器(Digital Signal Processor,DSP)来进行成像处理。文献[3]提出了一种基于图形处理单元(Graphic Processing Unit,GPU)的实时高分辨率FMCW SAR处理系统。但是,上述基于多板卡或GPU的SAR处理系统具有体积大、功耗高的缺点。文献[4]描述了一种轻型的数字波束形成SAR系统,并详细描述了数据采集和处理流程,但文中并没有提及如何通过精确的运动补偿来实现实时高分辨成像。SAR成像涉及高数据速率采集传输以及复杂算法并行处理,对处理资源消耗巨大。而对于资源受限的小型无人机等应用场合,性能和功耗是主要关注点。本文针对上述问题,提出了基于现场可编程逻辑门阵列的调频连续波合成孔径雷达实时成像方法。
1 实时成像信号处理算法原理
关于FMCW SAR信号处理,文献[5-7]提出了几种聚焦算法,如距离-多普勒、Chirp-Z变换、时域重建、波数域等算法。在本文中,因改进的距离多普勒(Modified Range-Doppler,MRD)算法具有计算效率高和内存要求低等显著优点,所以被用于无人机载实时处理。成像过程中,平台运动将引入误差相位,该相位会破坏方位向聚焦,导致成像模糊散焦。这些相位误差可以通过测量平台运动参数和运用数据驱动的自聚焦算法来估计和滤除。
假设雷达发射锯齿状的线性调频信号,雷达接收的点目标回波可以被表示为发射信号关于时间延迟和衰减的公式,如式(1)所示:
(1)
在接收机中,使用发射信号的延迟样本(可以使用成像场景中心距离来设置)对回波信号进行解线频调处理,解调的结果可表示为:
(2)
式(2)中,Rref是参考距离,且RΔ=Ri-Rref。由第一项相位可以看出,Sif是单频信号,并且在距离频率域内与RΔ成正比。然后,将傅里叶变换应用于等式(2),解调的信号被转换到频域,实现了距离脉冲压缩。应注意的是,FMCW雷达在整个脉冲重复间隔(Pulse Repeat Interval,PRI)内发射相对时间较长的扫频信号,在大斜视情况下,一步一停(Stop-and-Go Approximation)模型不再有效。这种情况下,单次扫频过程中的距离变化和相应回波的变化问题应该加以考虑和补偿。由于应用于遥感无人机,本文只涉及侧视或小斜视和短距离成像的情况,因此忽略雷达发射信号过程中雷达的运动对成像产生的影响。
式(2)最后一个指数项被称为解线频调接收系统中的残余视频相位(Residual Video Phase,RVP)项。由于不同距离的目标回波在时域上是交错的,从而会给后续处理带来问题。利用去斜的方法来对准位于不同距离单元的回波,可以去除RVP项。其中,去斜因子定义为:
(3)
雷达与散射点之间的相对运动将导致距离单元徙动,距离单元徙动由距离弯曲和距离走动组成。在本文中,我们考虑近距离子孔径成像模式,因此,距离弯曲的影响基本可以忽略不计。下面只进行距离走动的校正,其补偿公式可以表示为:
(4)
式(4)中,ΔR(tm)=-(vsinθ0)tm,v是雷达平台的运动速度,θ0是波束中心斜视角。
无人机的运动并不是平稳的,存在偏航、俯仰、横滚等偏差,这会导致雷达与散射点之间的距离变化产生误差,在方位向处理时由于失配而导致目标散焦,因此需要进行运动补偿。运动补偿包括两个方面:沿法平面和沿航线的补偿。由于本文采用的算法特点是子孔径长度远小于整个合成孔径的长度,此时假设每段子孔径内的速度和姿态恒定是合理的。因此,仅需要在法平面上进行误差补偿。相位补偿函数可以写作式(5),运动误差通过全球定位系统(Global Positioning System,GPS)/惯性导航系统(Inertial Navigation System,INS)结合基于回波数据的参数估计方法得到,然后构造运动相位补偿函数,进行全孔径相位误差消除:
(5)
式(5)中,r(tm)是法平面的由于运动误差和姿态误差导致的距离估计误差。
目标在一个子孔径时间内的能量沿方位向是分散的,为了聚焦目标的能量,需要进行方位向脉冲压缩,其参考函数为:
srefa=exp(-j2πfdctm-jπfdrtm2)
(6)
式(6)中,fdc是多普勒中心频率,fdr是多普勒频率变化率,它们可通过雷达天线相位中心以及从回波数据中估计得到。
采用MRD结合运动补偿的处理过程如图1所示。首先,对ADC(Analog to Digital Converter)采集的回波数据进行距离向脉冲压缩,去除RVP项和相应误差项,并在小斜视的情况下校正距离走动。此操作需要进行距离向傅里叶变换、逆傅里叶变换、相位向量相乘、加权和距离像截断。由于受到载机的运动误差和姿态误差的影响,图像的聚焦性能会下降。为了得到聚焦性能良好的图像,在上述算法的基础上增加了运动参数误差估计和运动补偿的模块。将数据分为多个子孔径,其运动信息主要是以GPS/INS为基础的信息和基于回波数据的参数估计方法相结合而获得的[8]。由于每个子孔径长度远小于整个合成孔径长度,所以可假设多普勒参数在每个子孔径内的变化是可忽略的。在全孔径条件下,SAR处理系统通过GPS/INS提供的数据和基于参数估计的瞬时多普勒变化得到平台的位置、姿态以及速度信息。获得基本运动参数后,构造相位补偿函数,通过全孔径运动补偿消除运动误差。最后,进行方位向脉冲压缩获得场景的图像。
分析上述成像算法,整个处理流程涉及大运算量和大计算量,国内外一般采用基于多片DSP阵列、CPU+GPU、多块信号处理板并行等架构来实时处理的,这些传统的处理方法具有体积大、系统复杂、功耗高等缺点,在微小型SAR系统中难以适用,需要研究新的高能效的雷达成像实时处理方法。

图1 SAR实时信号处理软件流程Fig.1 Software block diagram of real-time SAR processor
2 基于FPGA的调频连续波合成孔径雷达实时成像处理方法
2.1 实时处理电路
开发的小型SAR和光学设备一起集成在无人机的光学吊舱中。雷达前端采用FMCW技术,工作在Ka波段,可以大大降低发射功率和天线尺寸。FMCW体制雷达采用接收解线频调模式,即将接收信号和时延的发射信号混频以减小系统所需的采样率;然而,由于发射和接收同时进行,所以发射信号会泄漏到接收回波当中,尤其是在发射功率较大的时候。本设计中,将发射天线和接收天线分置,以提高发射接收隔离度。整个无人机吊舱采用分立模块组成,包括雷达前端、光学设备、稳定平台、实时信号处理模块、GPS接收机和INS等。
图2(a)给出了自主研发的基于标准3U紧凑型PCIe(Peripheral Component Interconnect Express)架构的SAR实时处理模块的实物图。实时处理模块功能框图如图2(b)所示,选用低功耗和高性能的Xilinx Kintex-7 FPGA(XC7K325T)作为主控处理器。Kintex-7 FPGA集成了大量的适用于高速滤波和快速傅里叶变换(Fast Fourier Transformation FFT)处理的DSP48Es,板卡挂载了2 GB第三代双倍数据速率(DDR3)的同步动态随机存取存储器(Synchronous Dynamic Random Access Memory,SDRAM),用于大带宽数据缓冲和转置。设计选用了16位分辨率和150 MHz采样率的ADC芯片AD9467,ADC的时钟由专门的低抖动时钟芯片驱动,选用的时钟芯片AD9520集成了锁相环(Phase Locked Loop,PLL)和压控振荡器(Voltage-controlled Oscillator,VCO),将参考输入变频,输出低抖动的多个时钟。另外,该模块集成了一片TI多核定点/浮点DSP TMS320C6670(1.25 GHz,4核),可用于后续动目标检测、图像匹配等扩展应用。本设计中,由于所有成像处理集成在一片FPGA中实现,暂不使用DSP,所以关闭其电源以节省功耗。
图2 SAR实时处理模块单元Fig.2 Photographs of the UAV SAR system
2.2 算法映射与FPGA实现
去除一个脉冲重复周期(Pulse Repeat Time,PRT)内线性调频信号扫掠的开始和结束部分,收集接收数据的中间部分(nrn点的长度)以进行信号处理,处理方案如图3所示。距离向处理包括一个nrn点FFT、两个nrn点快速逆傅里叶变换(Inverse Fast Fourier Transformation,IFFT)和两个nrn点的复数相乘运算。距离向处理完成之后,数据存储在SDRAM中。由于SAR成像在不同的阶段涉及沿距离向和方位向处理,因此采用快速转置操作[9]以重新排列数据,从而可以沿方位向线性顺序读取数据进行处理。距离向处理、运动补偿和方位向处理操作依次进行。此外,由于计算中涉及相位补偿,需要大量的三角函数计算,这里采用迭代坐标旋转数字计算(Coordinated Rotation Digital Computer,CORDIC)算法与查找表相结合用于sin/cos函数的生成。由于在FPGA上实现数学函数需要对精度、时钟速度和资源利用进行权衡折中,为了精确估计出目标运动和姿态参数,这里使用Xilinx提供的浮点核进行运算。然后,对运动参数进行滤波平滑来拟合平台的运动变化。
图3中描述了基于FPGA的多域处理过程,包括距离向处理、运动补偿和方位向处理,其中,距离向和方位向处理的主要计算单元在于FFT和复数乘法。为了获得精确聚焦的高分辨率SAR图像,进行运动补偿必不可少,而运动补偿中最重要的环节是多普勒参数估计,下面将详细讨论多普勒参数估计的电路实现和精度分析。
图3 SAR实时处理算法的FPGA电路映射Fig.3 Block diagram of FPGA processing scheme
多普勒参数估计由多普勒中心频率估计和多普勒调频率估计组成,估计的多普勒参数用于运动补偿和方位聚焦处理。本文从相干SAR回波中估计多普勒中心频率。首先从数据中获得方位向的功率谱[10],然后通过搜索该功率谱的偏移来提取多普勒中心频率,并且通过对功率谱求平均以提高信噪比(Signal-to-Noise Ratio,SNR)。多普勒中心频率估计电路如图4(a)所示。首先通过一级寄存器获得信号的延迟副本,并进行复数相乘操作,然后用两个累加器内核对复数乘法器的输出进行取平均操作。上述操作完成后,用一个计算反正切函数的CORDIC核计算所需角度,由此可以求出多普勒中心频率。多普勒调频率的精确估计是SAR图像聚焦的关键,图像偏置(Map Drift,MD)算法是一种有效的用于估计多普勒调频率的二次相位误差估计方法[11],它通过相邻子孔径图像在方位向上求相关来估计有关参数,其中,相对位移量代表了二次相位误差系数。图4(b)给出了多普勒调频率估计的电路设计图。该运算需要四个FFT核和一个IFFT核,其中,FFT核1、核2分别用于前、后半段数据的多普勒谱计算,FFT核3、核4和IFFT核用来进行快速互相关操作。最后,推导出图像偏移量,得出多普勒调频率。
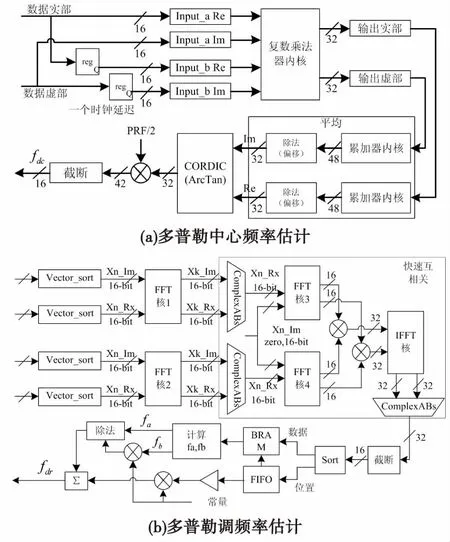
图4 参数估计电路结构Fig.4 Architecture mapping of Doppler parameter estimation in the FPGA
3 实验结果与性能分析
利用所开发的系统进行了实时UAV SAR外场实验。SAR系统工作在Ka波段条带模式。SAR飞行参数如下:载频fc=35 GHz、发射带宽B=500 MHz、脉冲重复间隔PRI=500 μs、天线波束宽度θa=3°、场景中心斜距R=5 km、斜视角θs=5°和飞机速度v=50 m/s。平台的位置、姿态和速度信息通过INS和GPS测量,并通过RS422提供给实时处理模块。采样率设置为50 MHz,距离向处理长度nrn=16 384。距离向处理完成之后,截取2 048点有效场景数据进行方位向处理,每个子孔径的方位向处理长度设置为512点。
影响FPGA设计的核心因素是处理速度、计算精度和资源消耗(逻辑、片上存储器、乘法器等),现逐一分析这些因素。
3.1 资源消耗
整个算法使用IEEE标准下的Verilog HDL语言,开发软件为ISE14.5。在目标FPGA上综合并实现的资源利用率如表1所示。对于整个信号处理流程,本设计占用资源率分别为:LUT(逻辑)占用30%、专用逻辑寄存器占用16%、BRAM(存储器)占用48%、DSP48E占用26%,有较大的余量。
3.2 处理延迟
距离向处理中,耗时最多的是大点数FFT和IFFT运算。距离向处理耗时460.5 μs,处理时间比脉冲重复时间(Tr=500 μs)短,满足实时性。如表2所示,总的方位向处理耗时115 ms,远远小于512点方位向处理的累积时间(250 ms)。

表1 资源利用率Tab.1 Resource utilization
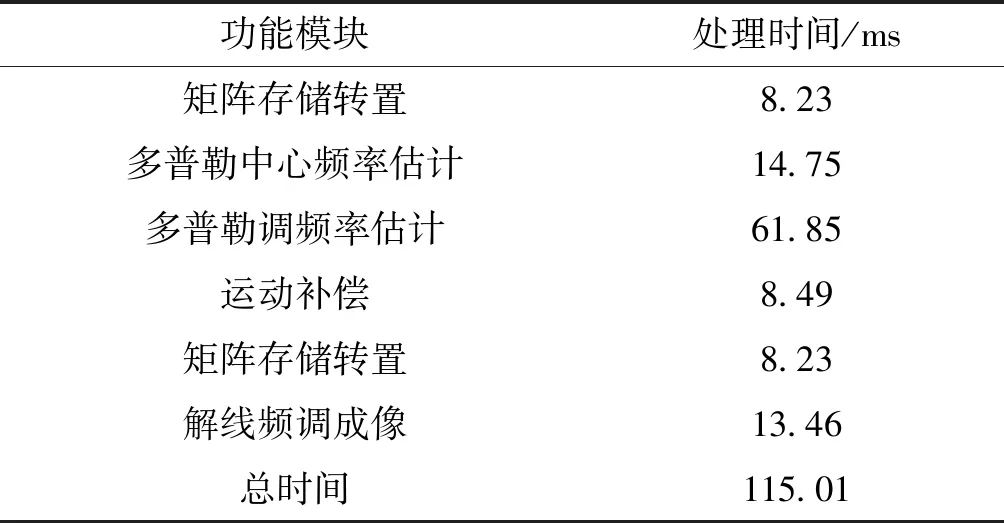
表2 方位向处理时间Tab.2 Azimuth processing time
3.3 精度分析
进行FPGA实现时,计算精度是需要考虑的关键性问题。为了保证足够的精度,本设计采用块浮点模式以实现FFT功能。多普勒参数估计的精度将极大地影响方位向聚焦效果。本实验中,对多普勒参数的计算误差进行了分析。对随机选择的10个子孔径实测数据的多普勒参数分别进行了基于Matlab和FPGA的计算精度对比。图5表明,基于Matlab与FPGA实现之间的计算误差非常小。通过分析图6的图像聚焦效果,该误差对运动补偿和方位向处理的影响基本可以忽略不计。
对实测数据进行连续SAR实时成像,图6显示给出了由485个子孔径图像拼接成的高分辨率SAR图像,图6中的山区、道路、市区可清楚地分辨出来。选择SAR图像右上部分强散射点响应来量化方位聚焦性能,其插值后的方位向剖面图如图7所示。图7中,峰值旁瓣约为-11.5 dB。由于分析的聚焦指标对应的是图像中选取的一个点,其包含了最大峰值周围的多个散射单元能量,因此旁瓣功率较大。
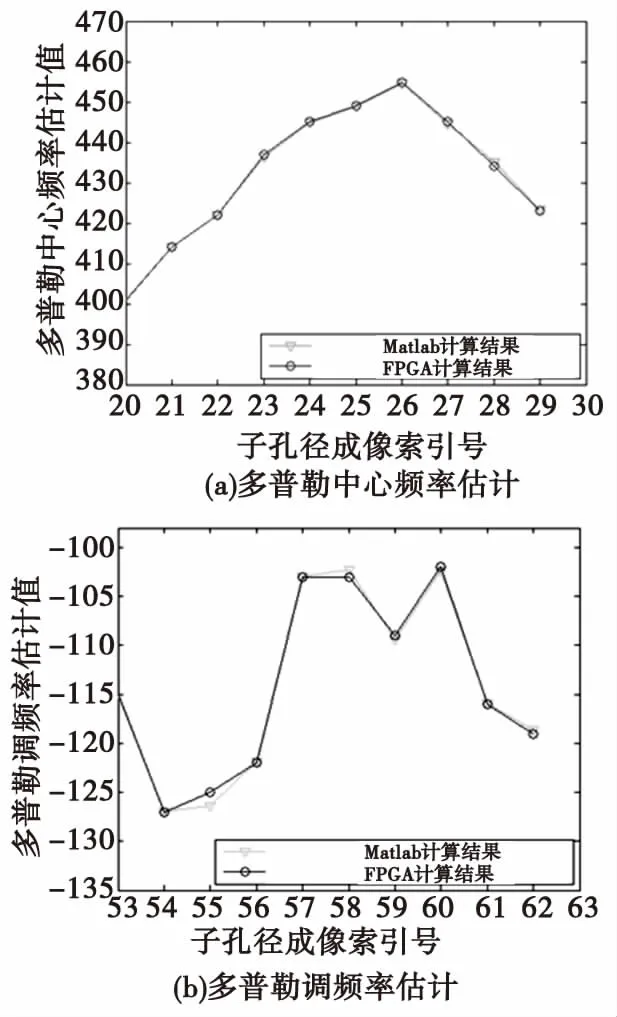
图5 Matlab仿真和FPGA实现的参数估计比较Fig.5 Comparison of parameter estimation of Matlab and FPGA implementation

图6 实时处理图像Fig.6 Real-time processing image
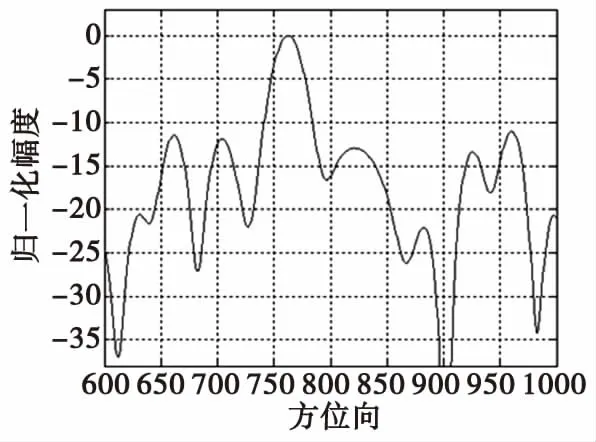
图7 方位向剖面图Fig.7 Azimuth profiles of a point of opportunity
4 结论
本文提出了用于无人机载小型线性调频连续波雷达的信号处理方法。该方法基于单片FPGA,实现了结合运动补偿和距离多普勒二维匹配的高分辨率合成孔径雷达实时成像处理。即使在平台运动状态不稳定的情况下也可以获得较清晰的聚焦图像。仿真和外场实验表明,本文所提出的电路设计具有集成度高、资源占用率小、功耗低、运算速率高等优点,从而提高了雷达实时成像系统的性能。目前,作者正在开发更加微型化,同时可以获得多模式SAR实时成像、动目标检测以及图像匹配识别相结合的新型SAR系统。