高速公路养护作业上游过渡区驾驶员注视转移特性研究
2019-05-14高建平谢义昌刘圆圆安文娟
高建平,谢义昌,刘圆圆,安文娟
(1. 重庆交通大学 土木工程学院,重庆 400074; 2. 招商局重庆交通科研设计院有限公司,重庆 400067)
0 引 言
机动车辆安全驾驶高度依赖视觉信息的有效获取[1]。车辆由普通路段驶入养护作业上游过渡区过程中,通行车道减少,车流行驶状态发生改变,道路信息量增加,导致驾驶员视觉行为工作负荷强度大幅提高。
学界对驾驶员视觉特性开展了大量的研究工作。注视行为分析方法方面,刘志强等[2]基于BP神经网络和Dempster-Shafer证据推理融合决策技术,实现了对不同驾驶注视行为模式的判别;袁伟等[3]对注视点解析坐标进行聚类,并运用马尔可夫链理论分析了驾驶员视觉转移特征。注视行为分析应用方面,徐慧智等[4]在信息满意度基础上构建了驾驶员车道变换视点位置转移模型;郭应时等[5]以注视转移模式表征参数为评价指标,得到了驾驶熟练程度计算方法。亦有学者就行车环境对注视行为影响方面进行了研究,G.UNDERWOOD等[6]研究了乡村、市郊和城市道路行车环境对不同熟练程度驾驶员注视顺序产生的影响;L.ITTI等[7]建立了不同视觉环境下的驾驶员注视点预测模型。
国内外相关研究主要集中于普通路段驾驶员注视点分布特征和转移规律,未考虑上游过渡区养护作业行车环境对驾驶员注视行为的影响。基于此,笔者以3名驾驶员为数据采集对象,利用眼动仪分别记录了普通路段和养护作业上游过渡区车辆行驶过程中驾驶员眼动参数,运用动态聚类算法和马尔可夫链理论分析了驾驶员注视行为,对比高速公路普通路段驾驶员眼动变化规律,重点研究了驾驶员在养护作业上游过渡区注视行为变化特性,为高速公路养护作业上游过渡区交通安全设施布设提供理论依据。
1 试验数据采集
1.1 试验路段选取
笔者选取G5013渝蓉高速公路重庆段普通路段和养护作业控制区作为试验路段,普通路段为双向六车道,设计时速120 km/h,养护作业区交通组织方式为封闭内侧道路养护作业,试验过程中测试作业区布置对驾驶员注视转移的影响。
1.2 试验仪器与被试人员
试验采用Smart Eye Pro5.7型非侵入式眼动仪,摄像头布设于车辆仪表台上表面,能对驾驶员的头部姿态和方向、眼动变化、眼皮闭合以及行车环境进行实时采集,具有对驾驶员干扰小、精度高、占用空间小和最大程度抵消外部照明影响等优点。
试验以3名驾驶员为眼动数据采集对象,要求被试驾驶员驾驶经验丰富且无重大交通事故经历。为保证驾驶员按正常的驾驶习惯行驶,事先避免告知驾驶员试验目的和道路条件。
1.3 数据采集指标测定
注视点分布特征反映了驾驶员注意力分布水平以及行车需求。笔者利用眼动仪分别采集3名被试驾驶员经过普通路段和上游过渡区时的注视点坐标,并记录行车过程中的交通环境。
2 注视区域划分
2.1 注视区域划分方法
驾驶员注视转移模式研究过程中,须利用注视点解析坐标将驾驶员视野划分为若干注视区域。目前,相关学者常用注视区域划分方法其优缺点[8-14],如表1。

表1 注视区域划分常用方法及其优缺点
2.2 基于K均值动态聚类算法的注视区域划分
通过分析注视区域划分常用方法,笔者采用K均值动态聚类算法[12]对注视点在视野平面上的位置解析坐标进行动态聚类,并划分注视区域。
对比分析聚类为5、6、7、8类这4种区域划分结果,笔者认为聚类为6类时符合驾驶员行车过程中的视觉搜索特性。图1为将驾驶员注视点分为6类结果,结合驾驶员行车过程中视野范围内主要注视目标物分布特征,对6类注视区域轮廓进行描画,如图2。
驾驶员视野范围内,各注视区域目标物不同,导致驾驶员注视点分布发生变化。通过逐帧分析试验录像,各区域注视点主要目标分析如表2。
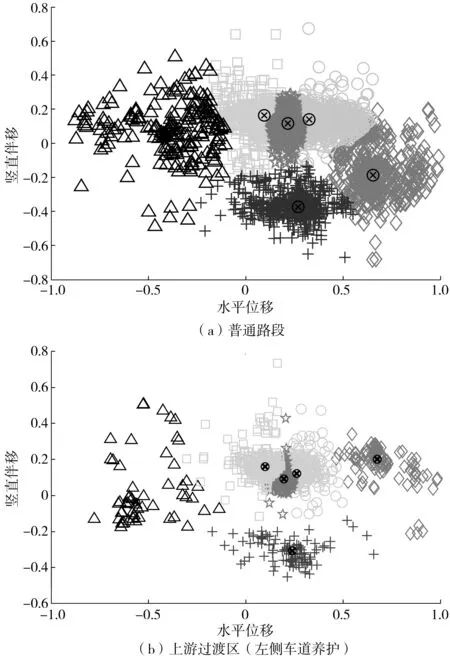
图1 驾驶员注视点位置聚类结果
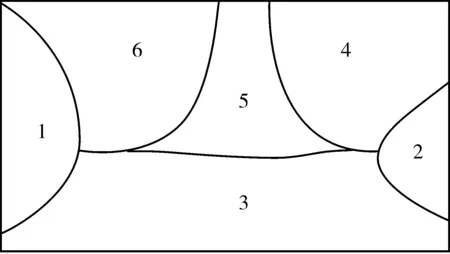
图2 K均值动态聚类结果
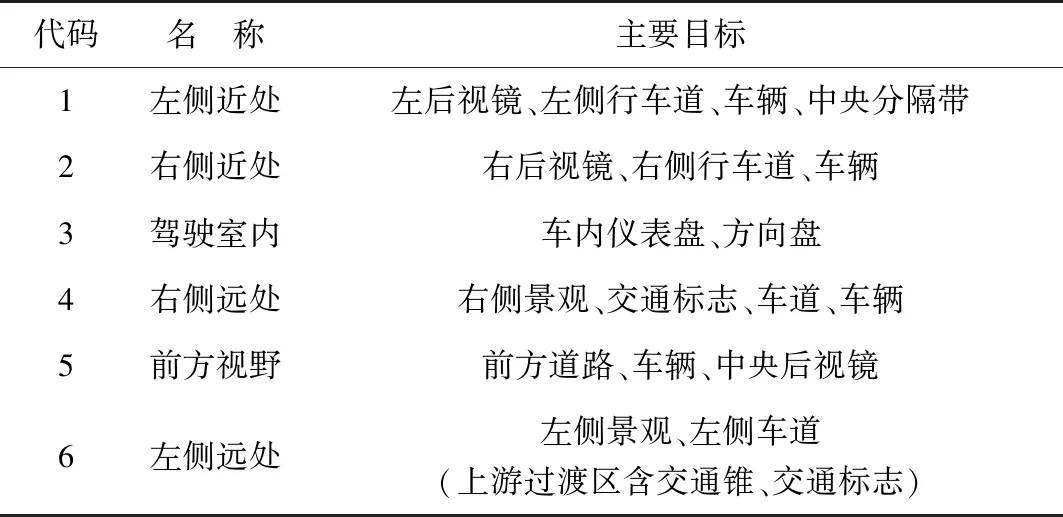
代码名 称主要目标1左侧近处左后视镜、左侧行车道、车辆、中央分隔带2右侧近处右后视镜、右侧行车道、车辆3驾驶室内车内仪表盘、方向盘4右侧远处右侧景观、交通标志、车道、车辆5前方视野前方道路、车辆、中央后视镜6左侧远处左侧景观、左侧车道(上游过渡区含交通锥、交通标志)
3 驾驶员注视点转移模式分析
马尔可夫链是一种离散事件的随机过程,具有无后效性特点[13]。驾驶员在注视行为过程中,下一时刻注视点落于哪一注视区域只受当前注视点位置影响,而与之前注视状态独立。因此,可利用马尔可夫链模型分析驾驶员在普通路段和养护作业上游过渡区行车过程中注视转移模式变化规律。
3.1 注视行为转移概率
马尔可夫链在n时刻的k步转移概率如式(1):
P{X(n+k)=j|X(n)=i},k≥1
(1)
式(1)表示n时刻系统由状态i经k个单位时间转移至状态j的概率,记为Pij(k)。
注视状态k步转移概率矩阵如式(2):
(2)
(3)
3.1.1 注视行为一步转移概率
注视行为一步转移概率表示驾驶员连续两次注视之间的内在关联。分别统计相邻两次注视点在不同注视区域之间的转移频数,计算一步状态转移概率,表3、4分别为普通路段和上游过渡区驾驶员注视行为一步转移概率。
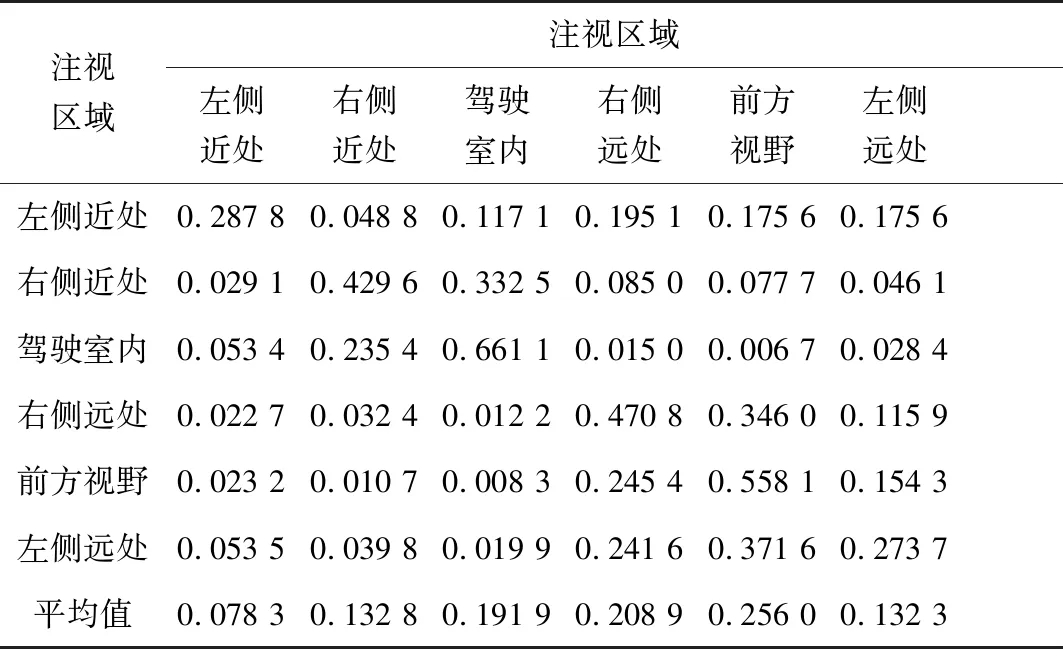
表3 普通路段注视行为一步转移概率

表4 上游过渡区注视行为一步转移概率
由注视行为一步转移概率可知,驾驶员在普通路段和上游过渡区注视转移规律主要表现为:
1)普通路段对角线一步转移概率均值为0.446 8(标准差为0.138 1);而上游过渡区对角线一步转移概率均值为0.582 8(标准差为0.082 5)。这说明与普通路段相比,上游过渡区内各注视区域主要目标物重复注视概率增加,注视区域之间的注视点转移概率减小,驾驶员需重复视认注视区域内主要目标物。因此,为减少驾驶员视觉负荷,不同标志设置间距不宜过小,含有重要信息的交通建议应重复设置,以避免驾驶员来不及视认标志而错过重要信息。
2)在普通路段和上游过渡区行车过程中,驾驶员注视点由其它注视区域转至前方视野的概率平均值分别为0.256 0、0.238 6,明显大于其他区域一步转移概率平均值。这表明驾驶员在注视转移过程中,注视点以前方视野为中心在各注视区域之间转移,前方视野有注视点回归趋势。
3)注视点在左、右侧近处,左侧远处与驾驶室内,右侧远处与驾驶室内等非相邻注视区域之间的转移概率均较小。这表明注视点转移过程中具有区域连续性。
4)在上游过渡区行车过程中,当前注视点在左侧远处时,下一注视点转移到右侧远处和前方视野的概率明显高于其他区域。这说明驾驶员在观察左侧车道养护作业交通安全设施时,还需关注前方车辆运行状态及道路右侧车辆和交通标志。因此,行车道左、右两侧交通标志配合设置,能保证标志信息连贯性,可有效提高上游过渡区行车安全。
3.1.2 注视行为两步转移回视概率
定义注视行为两步转移回视概率为注视点由i区域出发,经其他区域后又回到i区域的概率,反映了连续3次注视行为之间的内在关联。依据马尔可夫链理论,得到普通路段和上游过渡区不同注视区域间注视行为两步转移回视概率,如表5。

表5 注视行为两步转移回视概率
由表5可知:无论是普通路段还是上游过渡区,前方视野回视概率最高,而上游过渡区前方视野回视概率低于普通路段,但左右两侧远处回视概率较大,其中左侧远处回视概率增加一倍。这是因为与普通路段相比,上游过渡区左侧车道封闭,驾驶员需要不断关注左侧车道交通锥布设状况以及交通标志表达的限速和施工信息,同时也要注意右侧车辆行驶状况,以便调整驾驶车辆运行状态。
3.2 注视行为平稳分布
根据马尔可夫链的遍历性[13]说明,对某一注视区域j,驾驶员注视点从初始注视区域i出发,经历长时间的转移后,落在注视区域j的概率趋近于πj,此时系统处于马尔可夫链的平稳分布状态。根据注视行为一步转移概率计算结果及马尔可夫链平稳分布定义,分别求解普通路段和上游过渡区驾驶员注视行为平稳分布特征,如表6。

表6 驾驶员注视转移平稳分布
驾驶员注视转移平稳分布特征表明:
1)在普通路段和上游过渡区注视点落在中央区域(前方视野、左侧远处和右侧远处)概率分别为74.58%和83.37%,且驾驶员经过上游过渡区时注视点落在中央区域的概率更高,表明行车过程中中央区域是驾驶员获取路况信息的主要区域,上游过渡区行车过程中驾驶员对中央区域信息依赖程度更高。为提高上游过渡区行车安全,应保证中央区域交通安全设施具有良好的视认效果。
2)普通路段和上游过渡区驾驶员前方视野注视转移平稳概率基本保持一致,但上游过渡区左右两侧远处注视转移平稳概率增加,且左侧远处增幅明显。这说明上游过渡区行车过程中,驾驶员除了重点关注前方视野外,还需将更多注意力分配于左右两侧远处,这是因为左侧车道封闭,驾驶员需要多次注视交通锥等交通安全设施以获取足够的车道渠化与行车要求等信息,同时需要注意右侧车辆行驶状态,防止因车道数减少,未及时发现其他车辆突然汇入试验车行驶车道而造成的碰撞事故。
4 结 论
通过分析高速公路普通路段和养护作业上游过渡区驾驶员注视转移特性,得到以下结论:
1)利用K均值动态聚类算法并结合驾驶员视觉搜索特性,将驾驶员注视区域划分为左侧近处、右侧近处、驾驶室内、右侧远处、前方视野和左侧远处等6个区域;
2)前方视野、左侧远处和右侧远处是驾驶员获取道路信息的主要区域,注视概率累计达70%以上,驾驶员在注视转移过程中,注视点以前方视野为中心在各注视区域之间转移,前方视野有注视点回归趋势,且封闭车道一侧的注视概率增加;建议在养护作业交通安全设施布设过程中根据实际需求,可在通行车道增设临时标线,以便驾驶员及时获取有效信息;
3)受养护作业封闭车道影响,驾驶员需多次注视交通安全设施以获取足够车道渠化与行车要求等信息,同时需要注意相邻车道车辆行驶状态;建议重复设置包含重要信息的交通标志,且注意左右两侧标志配合设置,以提高标志信息的连贯性。
