大功率多路LED控制器的智能故障管理策略研究
2019-05-10徐健邓亮吴杰
徐健,邓亮,吴杰
(常州星宇车灯股份有限公司,江苏常州 213022)
0 引言
得益于电子科技日新月异的发展速度,出于主动驾驶安全的考虑,ADB系统应运而生。该系统在最大限度满足驾驶员的同时,不产生眩目。且最多的灯光维持在路面上,除了有其他车辆存在的特定区域,这些区域通过光型动态遮蔽。以此,保证了夜间灯光的最大利用率,有效提高了夜间行车安全。现有的技术尽管解决了ADB系统相关的一些实现装置和控制方法,但业内提出完善ADB系统故障处理方法相对较少,且其中绝大多数涉及机械式ADB前照灯系统,而非矩阵式ADB前照灯系统。为保证矩阵式LED自适应前照灯在使用中的可靠性,有必要对其故障处理策略进行完善。
针对上述问题,本文作者研究了一种大功率多路LED控制器失效的监测处理方法,可在小于1 s的时间内监测出故障,并随即采取相应的保护措施,把对外界的影响降低到最小,从而保证整个大功率多路LED控制器以及整个智能前照灯系统的安全性。
1 故障管理功能介绍
文中所研究设计的故障管理功能主要分为:电路的“滞回控制”保护功能、LED的“N-1”功能、智能温度保护功能。此外,系统架构方面,采用了“一对一”的模式,即一个控制器负责一个灯的故障管理功能,故障状态实时通过CAN总线分别上报给上位机。系统架构图如图1所示。
1.1 电路的“滞回控制”保护功能
当控制器对输入电压进行过压或欠压检测的时候,文中采用类似“宽进严出”的策略,这里的“进”是指因欠压或过压,控制器进入保护模式即“非正常工作模式”;而“出”是指从“非正常工作模式”退出,恢复到“正常工作模式”。
一般而言,9~16 V为正常工作电压,当输入电压低于9 V或高于16 V时,控制器不会立即进入“非正常工作模式”,而是当输入电压低于8 V或高于16 V时,才会进入“非正常工作模式”。反之,只有当输入电压满足9~16 V时,控制器才会从“非正常工作模式”恢复到“正常工作模式”。这样做的好处是:避免了因为电压抖动而造成的电路震荡,从而减少了对负载产生的影响,延长了使用寿命。
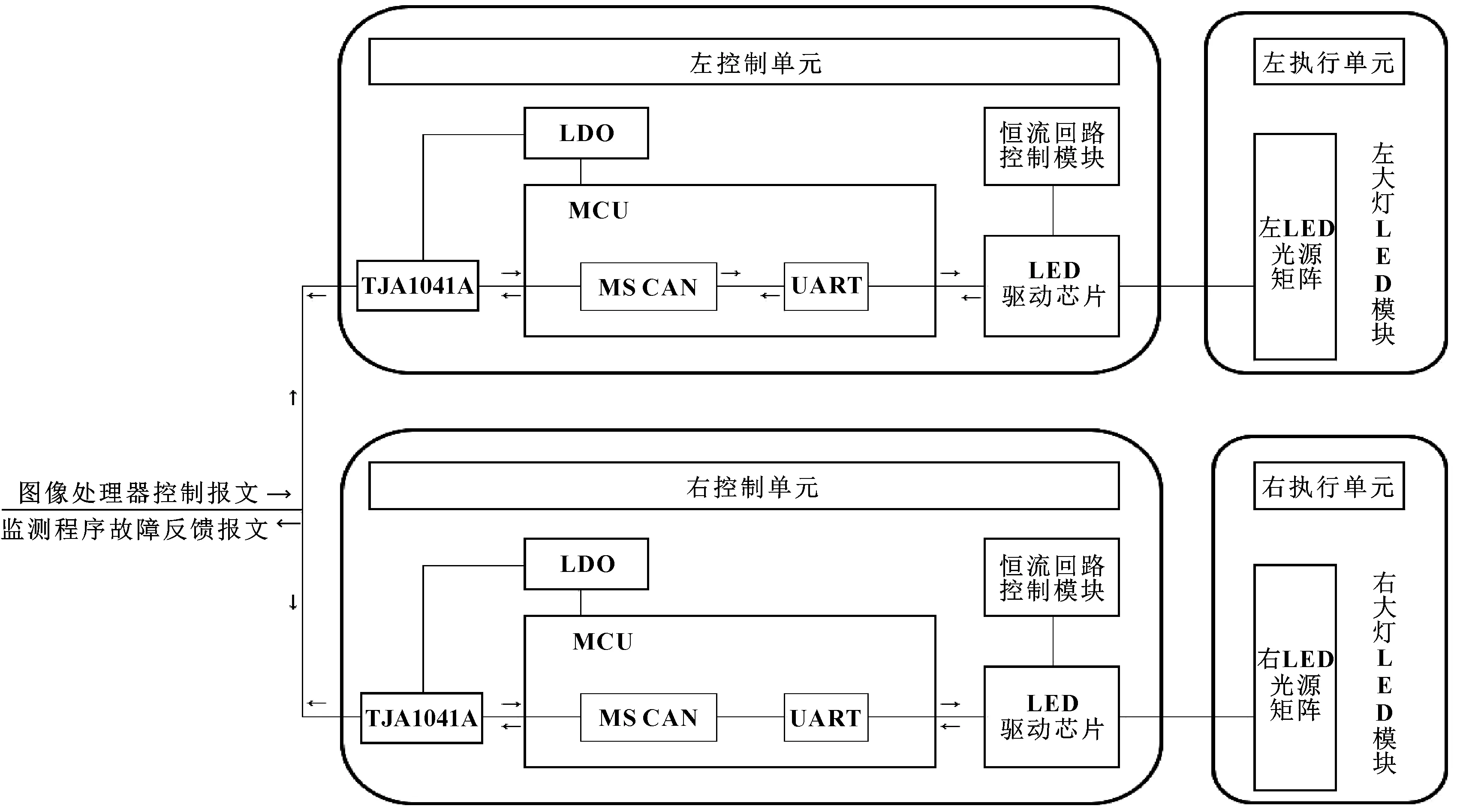
图1 系统架构图
1.2 LED的“N-1”功能
所谓的“N-1”功能,即在LED模组中含有多颗LED的情况下,有一颗LED发生故障,那么整个模组内的LED都将停止工作(即熄灭)。文中的设计是将MCU和LED驱动芯片采用UART串行总线相连,通过实时查询的方式,可以知道每颗LED的故障状态(开路、短路)。当控制器了解到LED存在开路或者短路故障后,会停止所有LED的工作状态,并将故障状态上报给上位机。这个功能旨在当前照灯发生故障的时候能够及时提醒驾驶员应去维修店进行维修,提高夜间驾驶的安全性。
1.3 智能温度保护功能
通过对安装在LED模组上的热敏电阻进行AD采样,将采样结果与预设的阈值进行比对。文中设计了二级的温度保护机制,即设定了两个过温阈值。当采样值超过第一阈值且未超过第二阈值时,控制器进入一级温度保护状态,即将整体LED亮度降低为50%,同时开启定时器,当持续时间超过预设时间值之后自动进入二级温度保护状态。具体的工作流程图2所示。
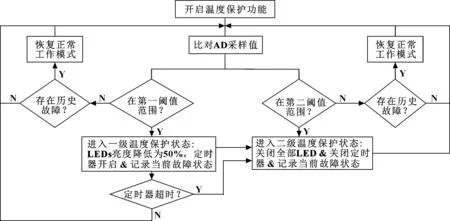
图2 智能温度保护功能流程图
2 故障管理流程
文中大功率多路LED控制器的智能故障管理方法流程设计为两部分,即主流程和子流程。其中,主流程负责整个故障管理系统的运转,判断是否开启自适应功能、故障管理程序是否应该开启、判断是否有故障发生、该故障是否为历史故障,以及不同的故障处理措施(见图3)。子流程主要负责在监测程序开启的情况下,监测所述前照灯工作电压、LED温度、LED短路或断路失效以及CAN总线故障等(见图4)。当监测到故障随即采取相应的故障处理措施,并通过CAN总线上报给上位机。
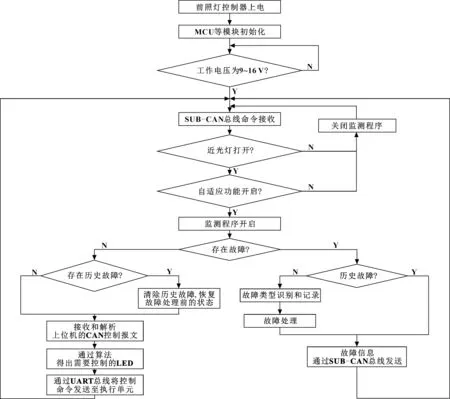
图3 控制系统主流程图
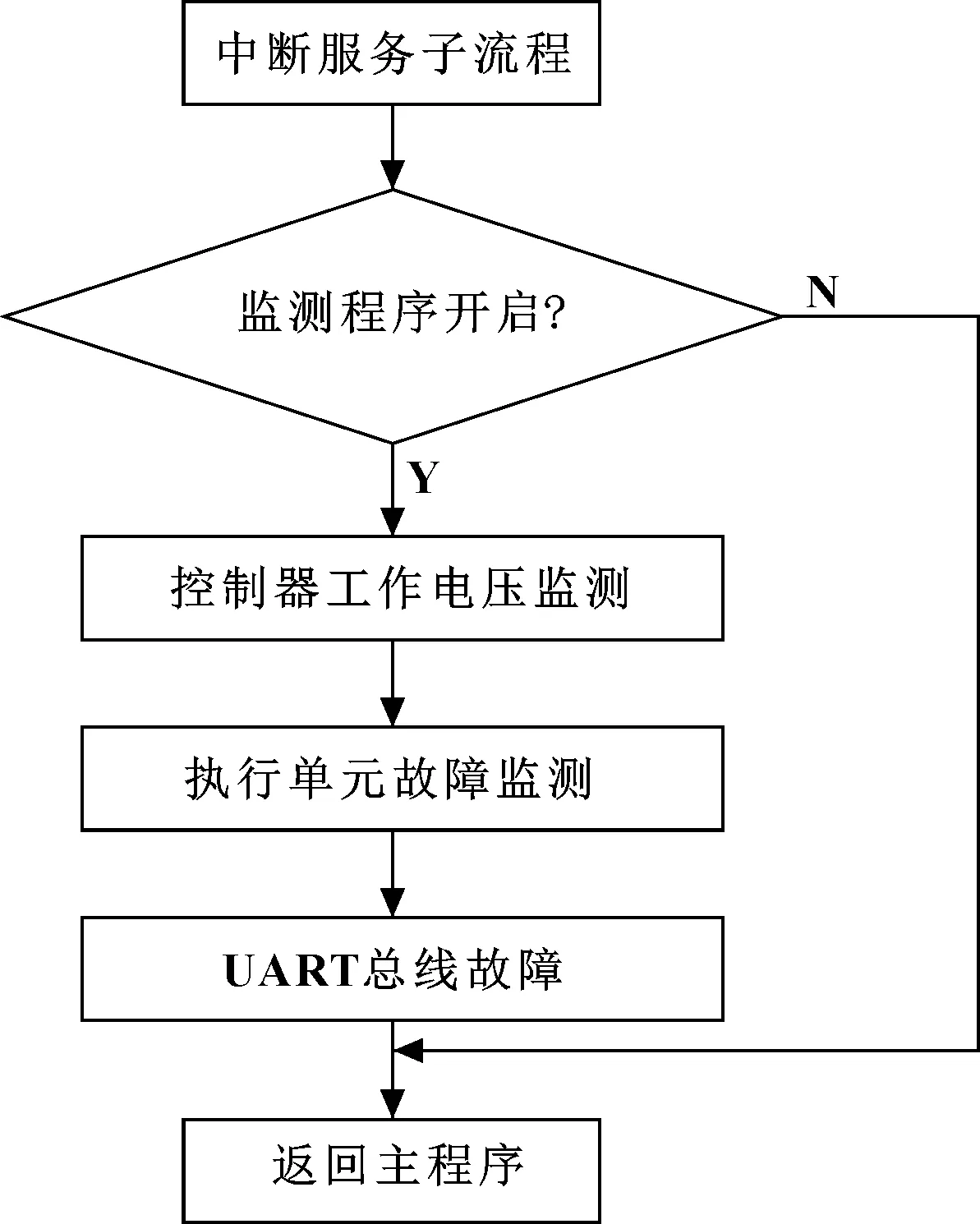
图4 控制系统子流程图
3 测试验证
在实验室环境下,模拟了过温、过压欠压,以及LED故障等情况,观察是否能够按照预先设计的策略实现对LED控制器的智能保护。通过实验发现,按照文中所述的技术方案,可实现上述的故障保护措施。同时,也通过Vector CANoe工具实时监测控制器上报给上位机的故障状态报文,如图5—图8所示。
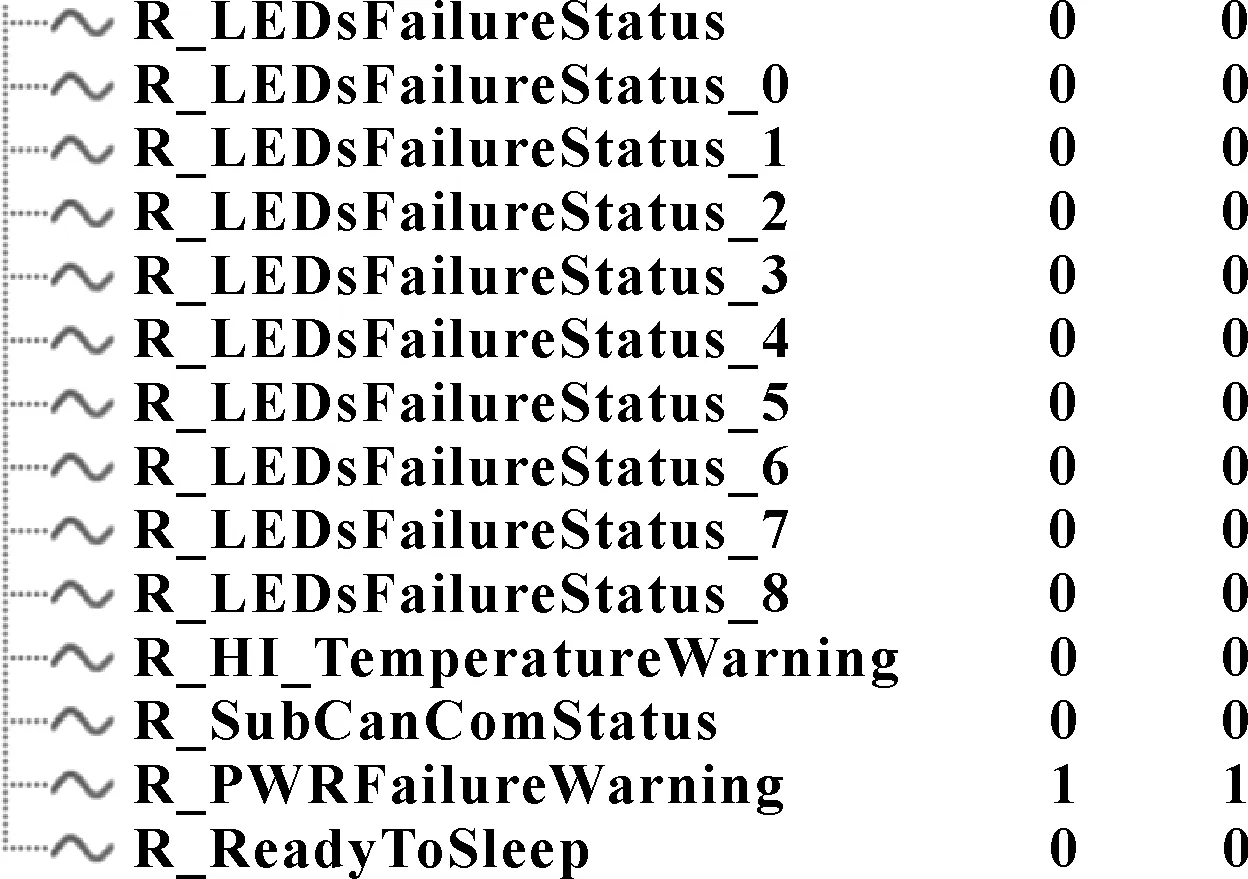
图5 欠压故障报警
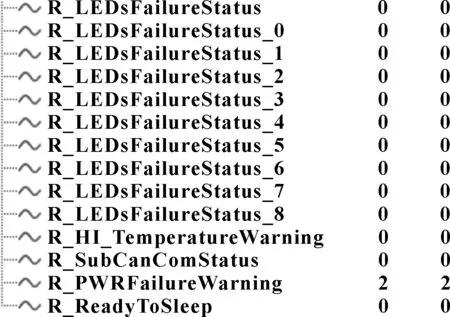
图6 过压故障报警
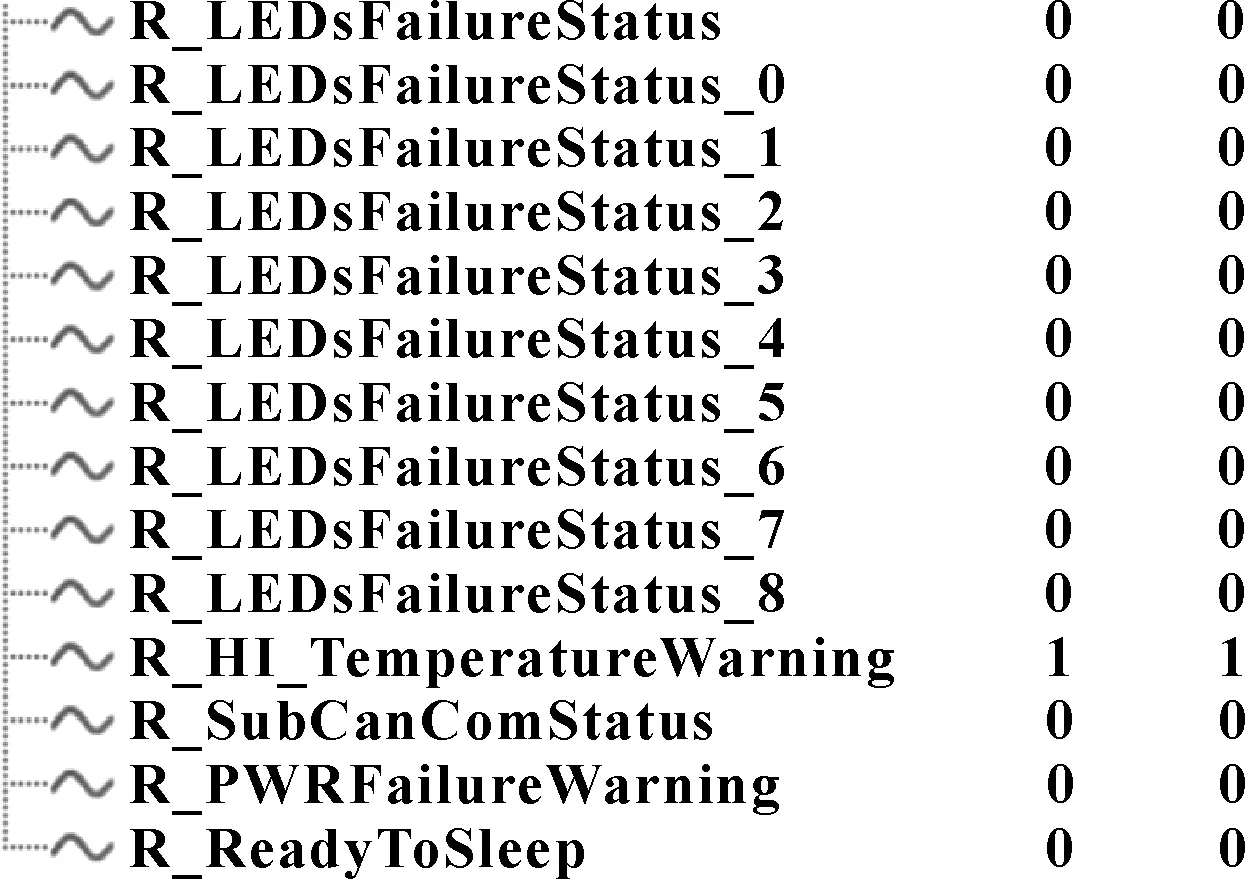
图7 过温故障报警

图8 LED故障报警
4 结束语
大功率多路LED控制器的智能故障管理策略的应用,大大提高了智能前照灯系统的稳定性与可靠性。同时,通过CAN总线的实时故障上报,车身端也能清楚地了解前照灯的工作状态,在故障发生的时候能及时通知驾驶员,同时采取相应的保护措施,这样大大提高了驾驶员夜间驾驶的安全性。
