GPS与格洛纳斯电离层电子总含量建模的差异性分析及改进
2019-05-09王解先王明华
韩 玲, 王解先, 王明华
(同济大学 测绘与地理信息学院, 上海 200092)
GNSS(global navigation satellite system)双频接收机已广泛应用于电离层的监测与研究[1-2].GPS(global positioning system)采用码分多址在L1和L2波段上提供伪距和载波相位观测值.GLONASS(global orbiting navigation satellite system)采用频分多址(FDMA)在15个信号频段上播发信息.GLONASS经常与GPS结合用以提高电子总含量(TEC)的观测精度,认为两者具有较强的一致性[3-6].然而,由于两者在信号结构、卫星星座配置、轨道倾角等方面的差异性,导致两者TEC间系统差异值在纬度、本地时等方面呈现规律性变化.利用MGEX(multi-GNSS experiment)/IGS(internal GNSS service) 以及中国地壳运动监测网(CMONOC)提供的高精度和高时空分辨率的GPS/GLONASS数据,对这一差异性进行研究.最后,基于对两者差异规律性的认识,提出了对GPS/GLONASS权重策略的改进并验证了TEC计算精度.
1 利用GPS/GLONASS对电离层建模
为了减少TEC观测值的噪声水平,基于载波相位平滑伪距观测量形成的电离层残差组合(GF)可以计算出TEC[3],如下所示:
(1)

基于TEC单层球壳模型[7-10],需要将斜向TEC(STEC)通过投影函数转换为垂向TEC(VTEC).基于欧洲定轨中心(CODE)改进后的投影函数(MSLM)如下所示:
式中:f(z)为投影函数;H为假设的电离层薄层高度,取450 km;R为地球半径(6 387 km);z为卫星高度角;α为常数,取0.978.
采用球谐函数模型对全球VTEC进行建模,选取多项式模型对区域建模,如下所示:

(1)

式中:DGs、DGr、DRs、DRr为待估参数;VG和VR分别为GPS和GLONASS计算的VTEC.为了避免法方程奇异并增强鲁棒性,需要增加约束方程,即假设所有GPS和GLONASS卫星DCB的加和分别为零,如下所示:
TEC以TECU(total electron content unit)为单位,1 TECU相当于每平方米有1016个电子.
2 全球建模差异性分析
利用2014年7月1日全球495个MGEX/IGS台站进行球谐函数建模.测站分布如图1所示.
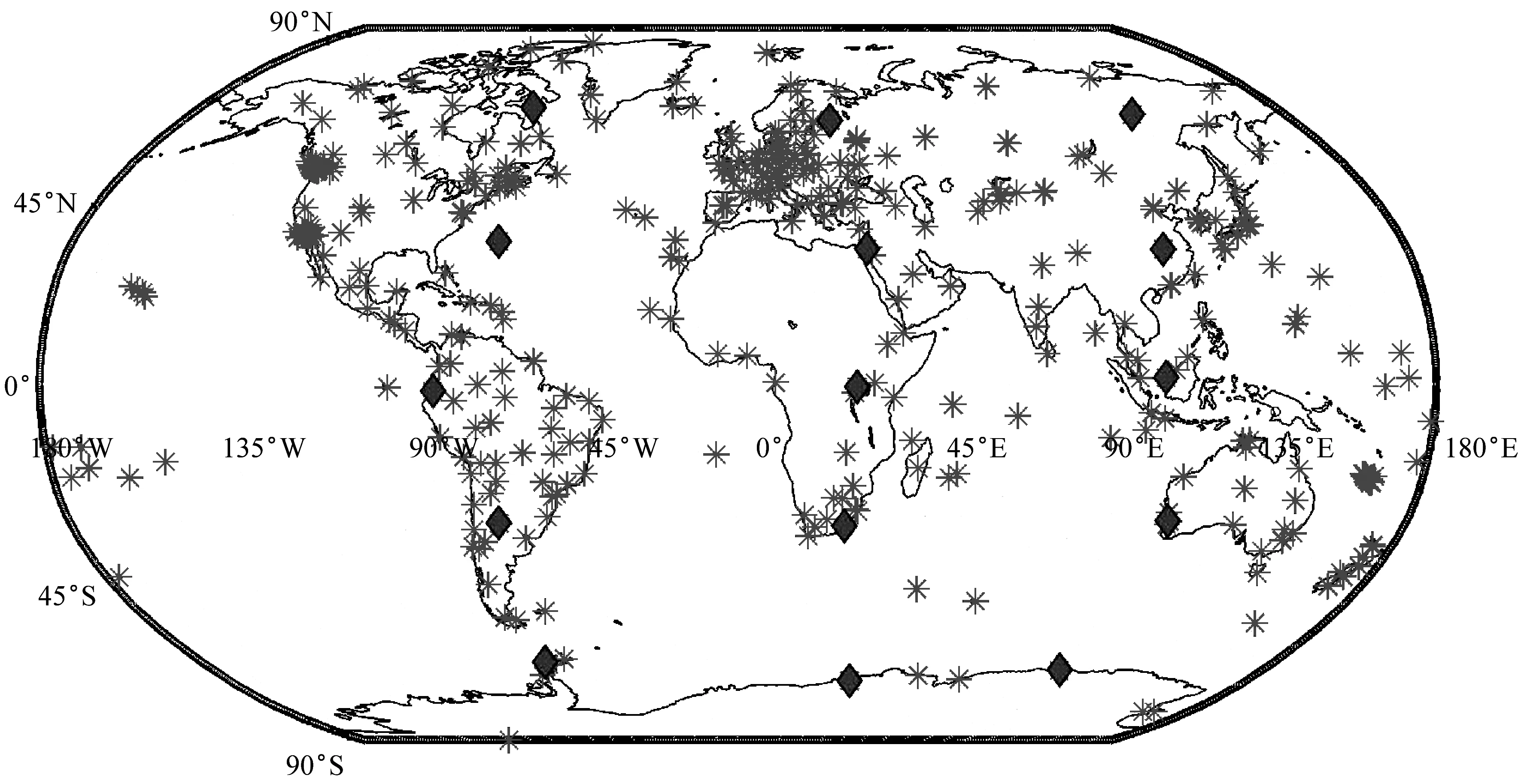
图1 MGEX/IGS全球台站分布
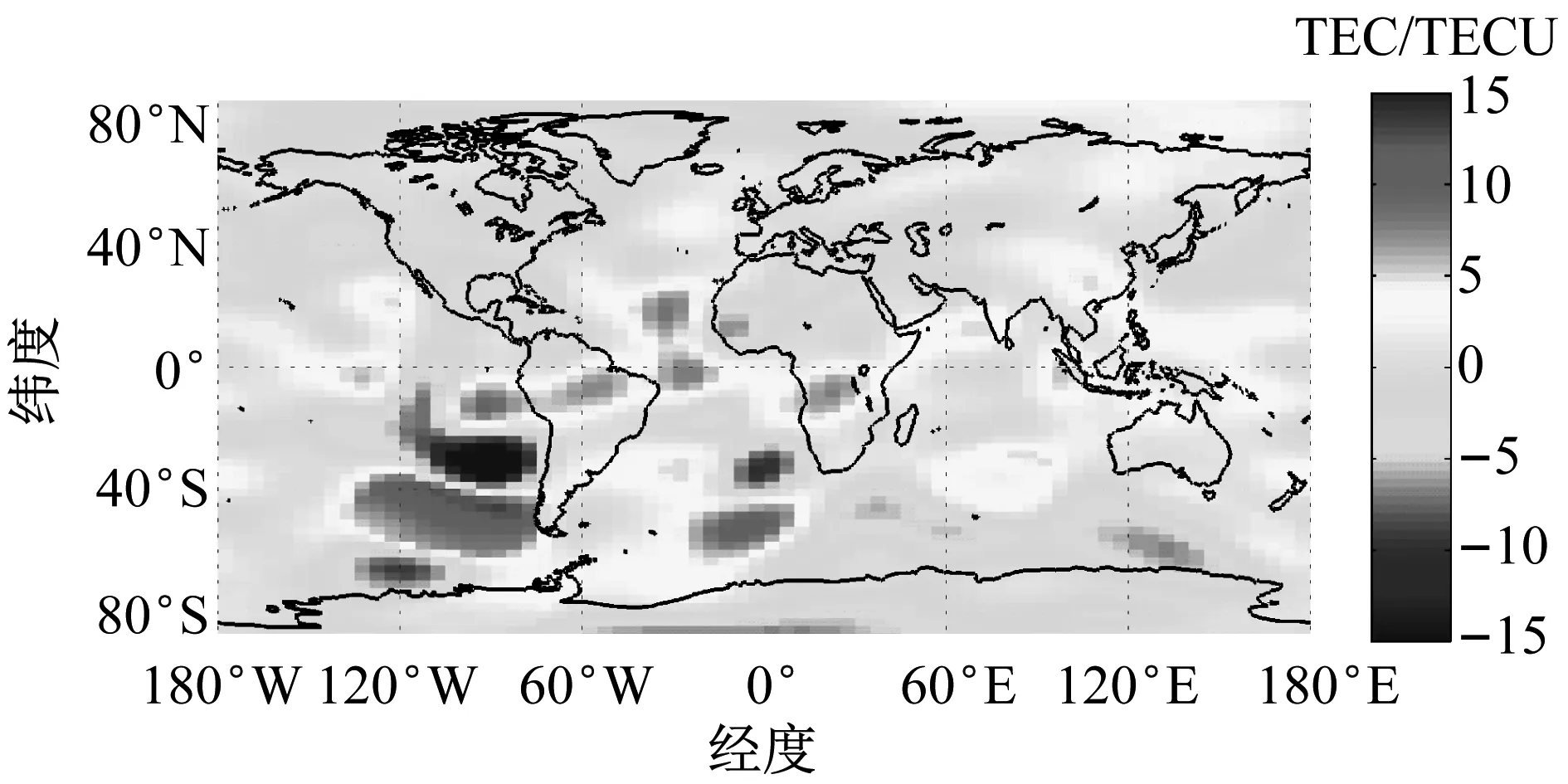
分别利用GPS 和GLONASS观测值对全球VTEC建模并计算,生成经度5°、纬度2.5°为间隔的VTEC格网图,以CODE global ionosphere maps(GIM)作为参考.图2a和图2b分别给出世界时9时GPS VTEC以及GLONASS VTEC与CODE GIM计算结果差异.由图2可以看出,GPS VTEC精度要优于GLONASS VTEC精度.GPS VTEC及GLONASS VTEC的均方根误差(RMS)分别为2.3 TECU和 4.6 TECU.利用GLONASS观测值建模得出的VTEC存在偏差,均值要低于CODE GIM计算结果.GPS VTEC及GLONASS VTEC与CODE GIM计算结果的平均偏差分别为0.8 TECU和1.4 TECU.
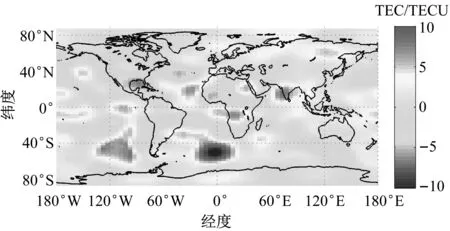
a GPS VTEC与CODE GIM计算结果的差异

b GLONASS VTEC与CODE GIM计算结果的差异
由图3可见,GPS C1W-C2W的DCB与CODE GIM计算结果差异在±0.15 ns以内,RMS为0.06 ns.GLONASS C1P-C2P的DCB与CODE GIM计算结果差异在±0.60 ns以内,RMS为0.30 ns.图3中,PRN指伪随机噪声码.
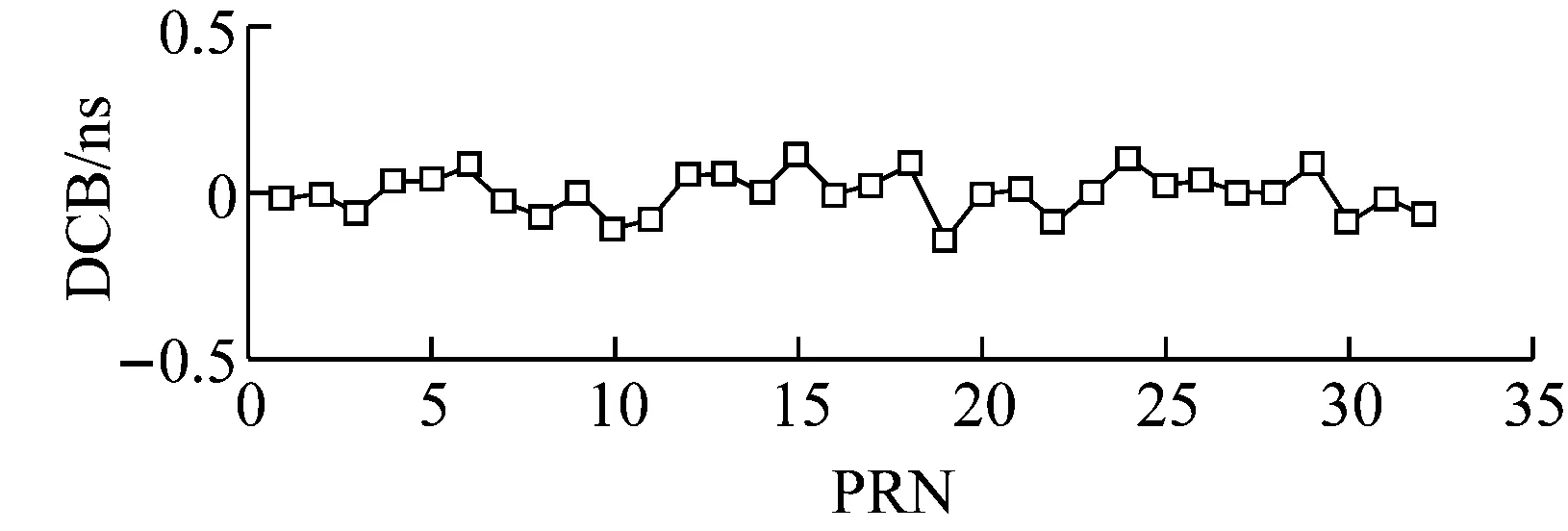
a GPS DCB和CODE GIM计算结果的差异
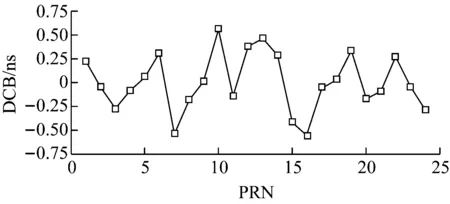
b GLONASS DCB和CODE GIM计算结果的差异
小由图1和图2可见,测站分布虽然基本实现了全球覆盖,但是对非洲北部、两极及赤道附近海洋区域测站空间分辨率差,特别是南半球海洋区域.如90°W至180°W、135°E至180°E区域,有效测站密度且个数少,对TEC估计可靠性较低.为了避免台站分布不均匀带来的系统偏差,选取了台站覆盖较好的区域,经度在60°W、30°E以及120°E,纬度在60°S至 60°N附近的15个台站,如图1中菱形点所示.如表1所示,GPS TEC系统偏差和内符精度均要优于GLONASS TEC.相比于CODE GIM计算结果,GPS TEC的系统偏差为-0.7 TECU,GLONASS TEC的系统偏差为-1.6 TECU.GPS内符精度为0.4~2.3 TECU,GLONASS内符精度为0.9~3.0 TECU.中高纬区域台站精度要优于低纬区域台站精度,如低纬赤道区域NAUR台站的GPS TEC和GLONASS TEC系统偏差分别为-2.4 TECU和-3.4 TECU,SAGA台站的GPS TEC和GLONASS TEC台站内符精度则为2.3 TECU及3.0 TECU,要高于其他中高纬台站,这与低纬赤道地区的电离层活动水平以及特性有关.
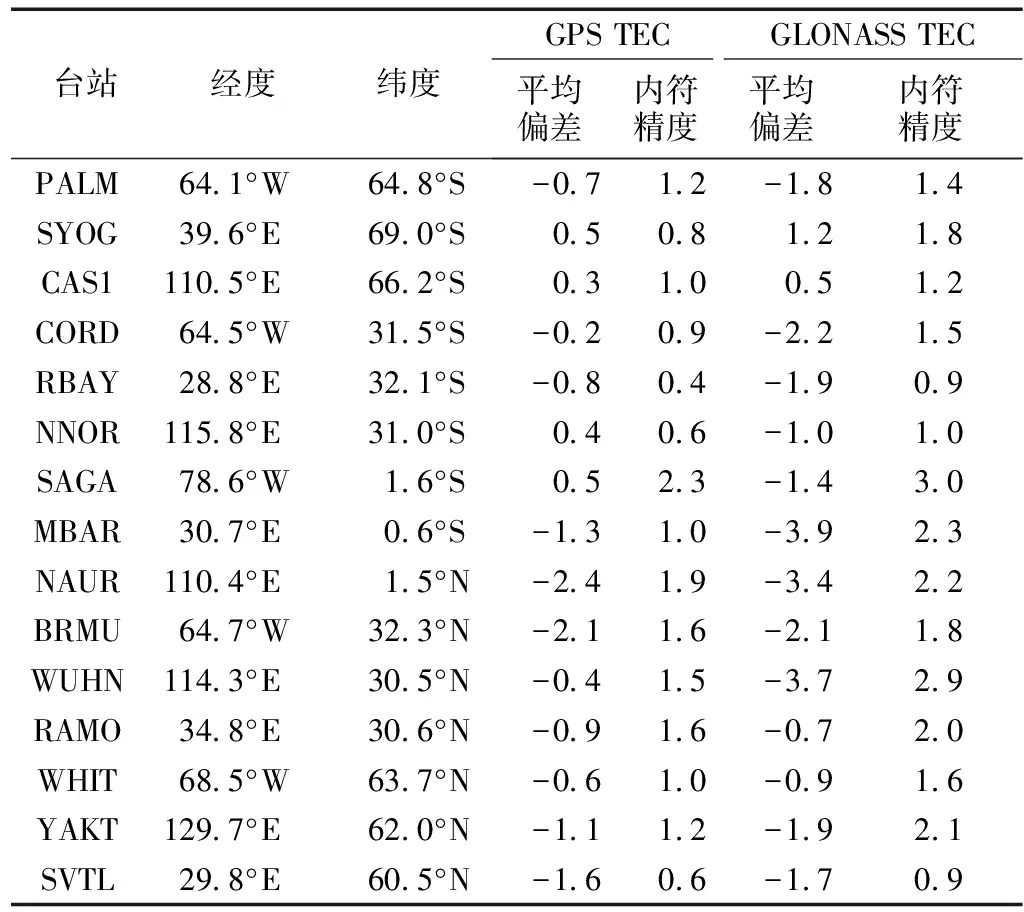
表1 GPS TEC和GLONASS TEC差异在全球不同经纬度台站的平均偏差以及内符精度
3 中国区域差异性分析
为了更为细致地描述GPS TEC和GLONASS TEC在中国区域的差异特性,采用了中国地壳运动监测网数据.如图4所示,黑点表示所有的260个观测台站,星形点表示选取的用以比较的台站,这4个台站坐标与子午工程电离层测高仪坐标非常接近.根据多项式模型分别利用GPS以及GLONASS观测值对中国区域进行建模(见式(1)).
3.1 GPS TEC和GLONASS TEC差异与纬度的关系
图5给出海南和漠河上空在2014年7月至8月(DOY182至DOY239)的GPS TEC和GLONASS TEC以及两者之间的差异值.表2给出了GPS TEC和GLONASS TEC差异在不同纬度台站的中值、中误差以及相关系数.
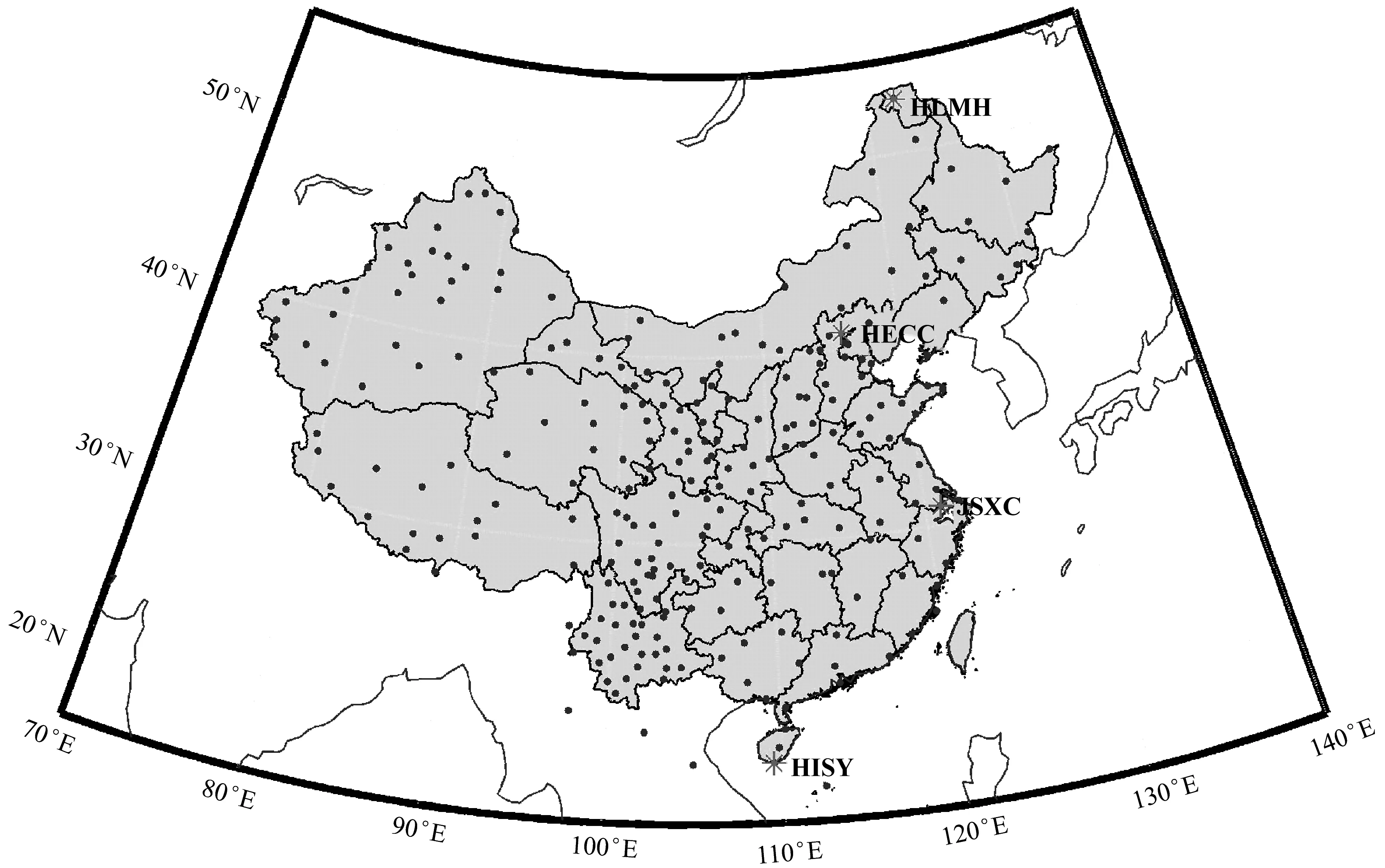
图4 中国地壳运动监测网台站分布
(1) 与全球区域类似,中国区域GPS TEC精度优于GLONASS TEC精度.在低纬区域,如海南台站HISY,GPS TEC 内符精度约为1.5 TECU,GLONASS TEC内符精度约为1.8 TECU.在高纬区域,如漠河台站HLMH,GPS TEC 内符精度约为0.9 TECU,GLONASS TEC内符精度约为1.1 TECU.
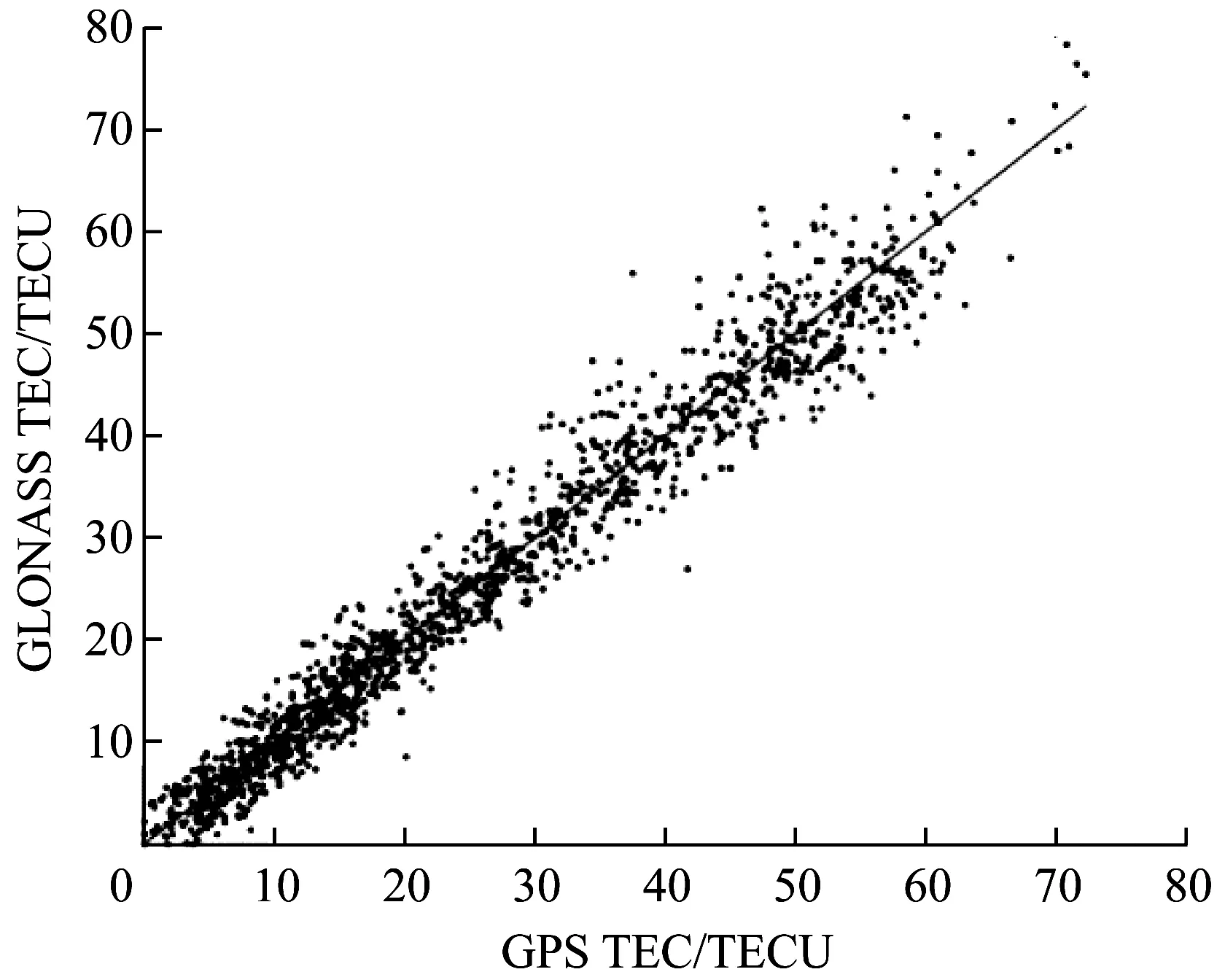
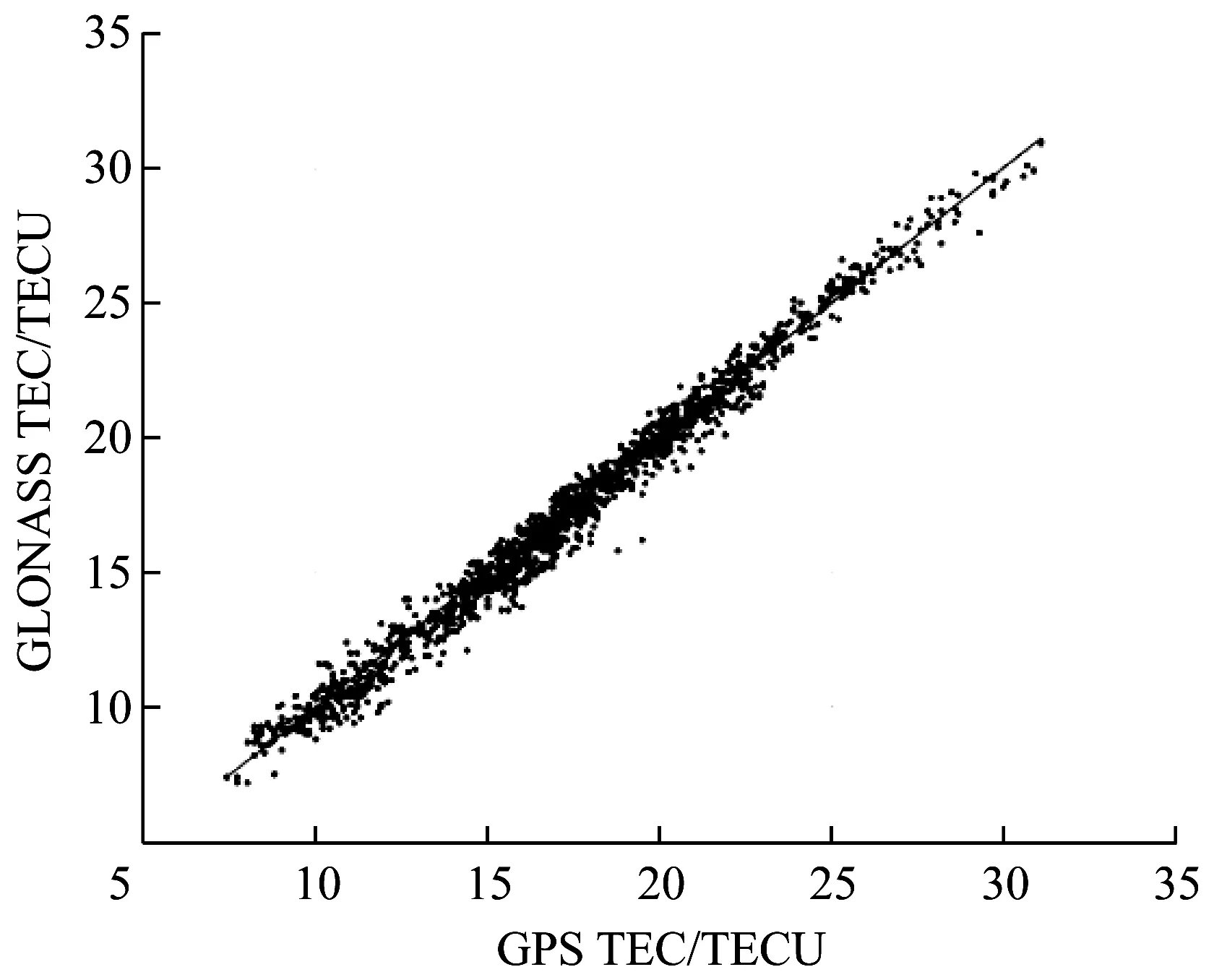
(2) GLONASS TEC比GPS TEC平均低约0.2~0.4 TECU,并且GPS TEC和GLONASS TEC的相关系数随着纬度的降低而下降,变化范围为0.985~0.992,如表2所示.图6给出了GLONASS TEC和GPS TEC的相关图.
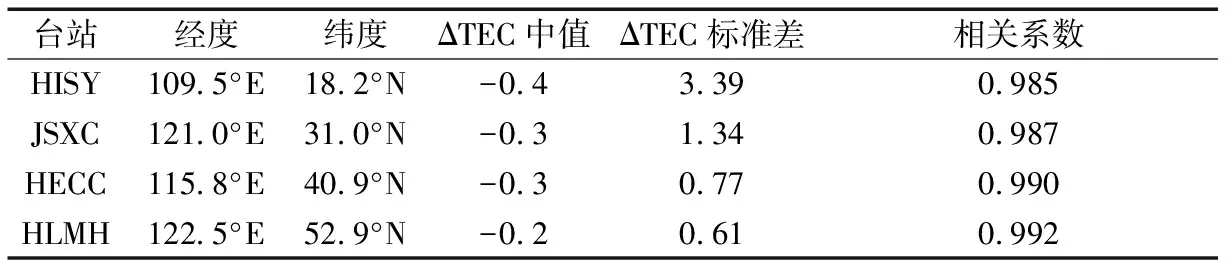
表2 GPS TEC和GLONASS TEC差异在不同纬度台站的中值以及中误差
(3) 中国区域GPS TEC和 GLONASS TEC差异的标准差会随着纬度降低而增大,两者在低中高纬地区的4个台站ΔTEC中值分别为-0.4、-0.3、-0.3、-0.2 TECU.
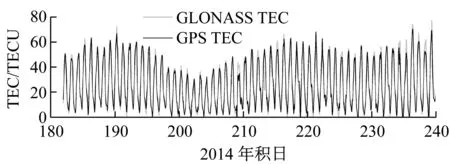
a 海南台站GPS TEC和GLONASS TEC
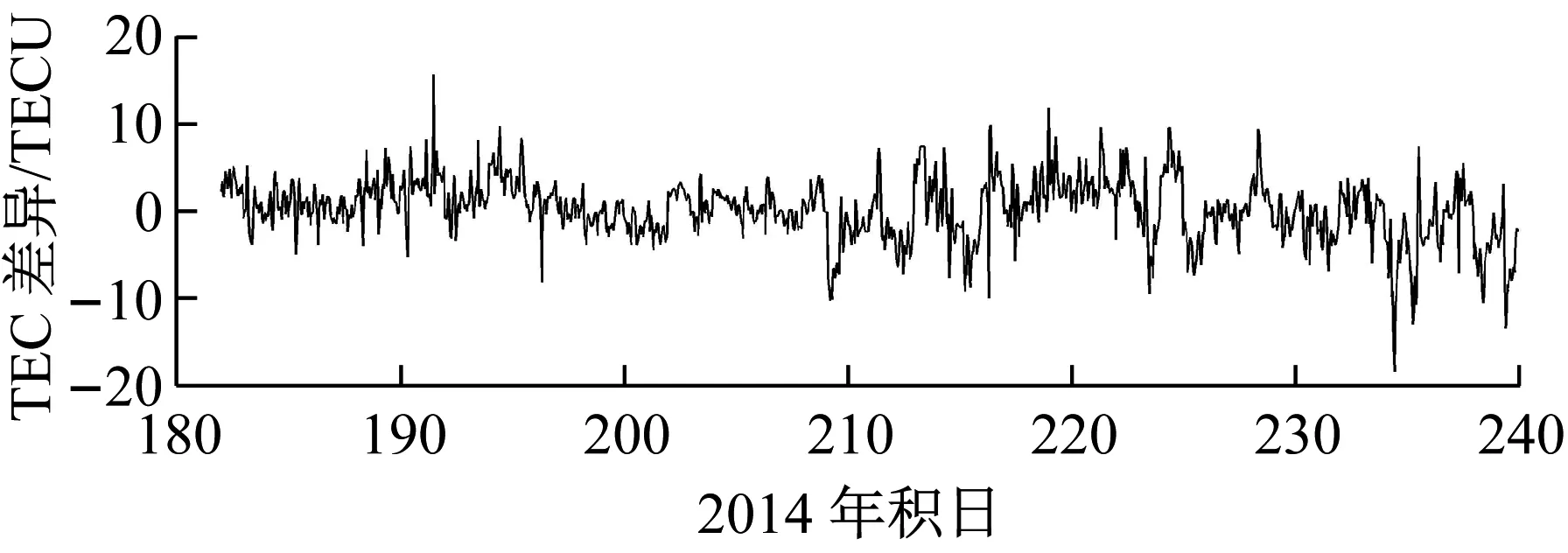
b 海南台站GPS TEC和GLONASS TEC差异
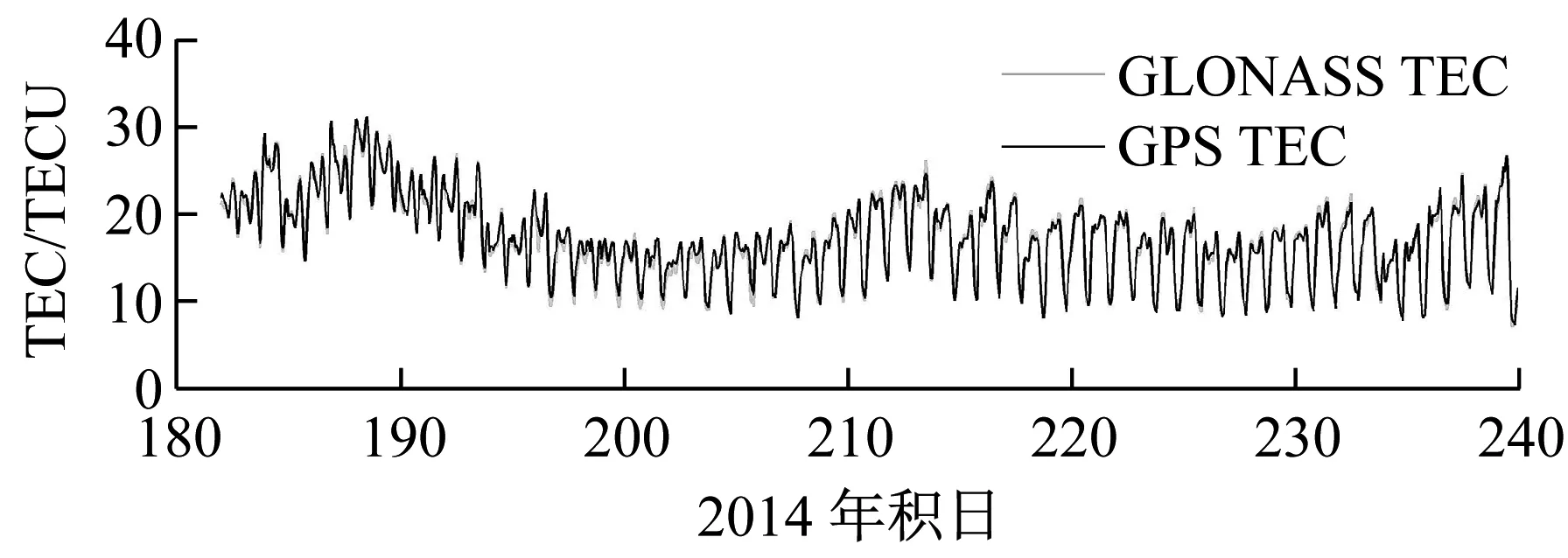
c 漠河台站GPS TEC和GLONASS TEC

d 漠河台站GPS TEC和GLONASS TEC差异
Fig.5 Difference between GPS TEC and GLONASS TEC over Hainan and Mohe stations
(4) 中国区域内低纬台站的GPS TEC和GLONASS TEC在夜间(LT00~LT05)相对稳定,在日间(LT11~ LT16)则变化相对剧烈,而高纬台站在日间和夜间相差不大,在夜间有时甚至比在日间更为剧烈,如表3所示.低纬HISY台站,GPS和GLONASS日间TEC STD(标准差)比夜间要大约0.2~0.3 TECU;高纬HLMH台站, GPS和GLONASS日间TEC STD比夜间甚至要小0.2 TECU.
3.2 GPS TEC和GLONASS TEC差异与卫星配置关系
a 海南台站
b 漠河台站

表3 海南和漠河台站日间和夜间GPS TEC和GLONASS TEC标准差差异
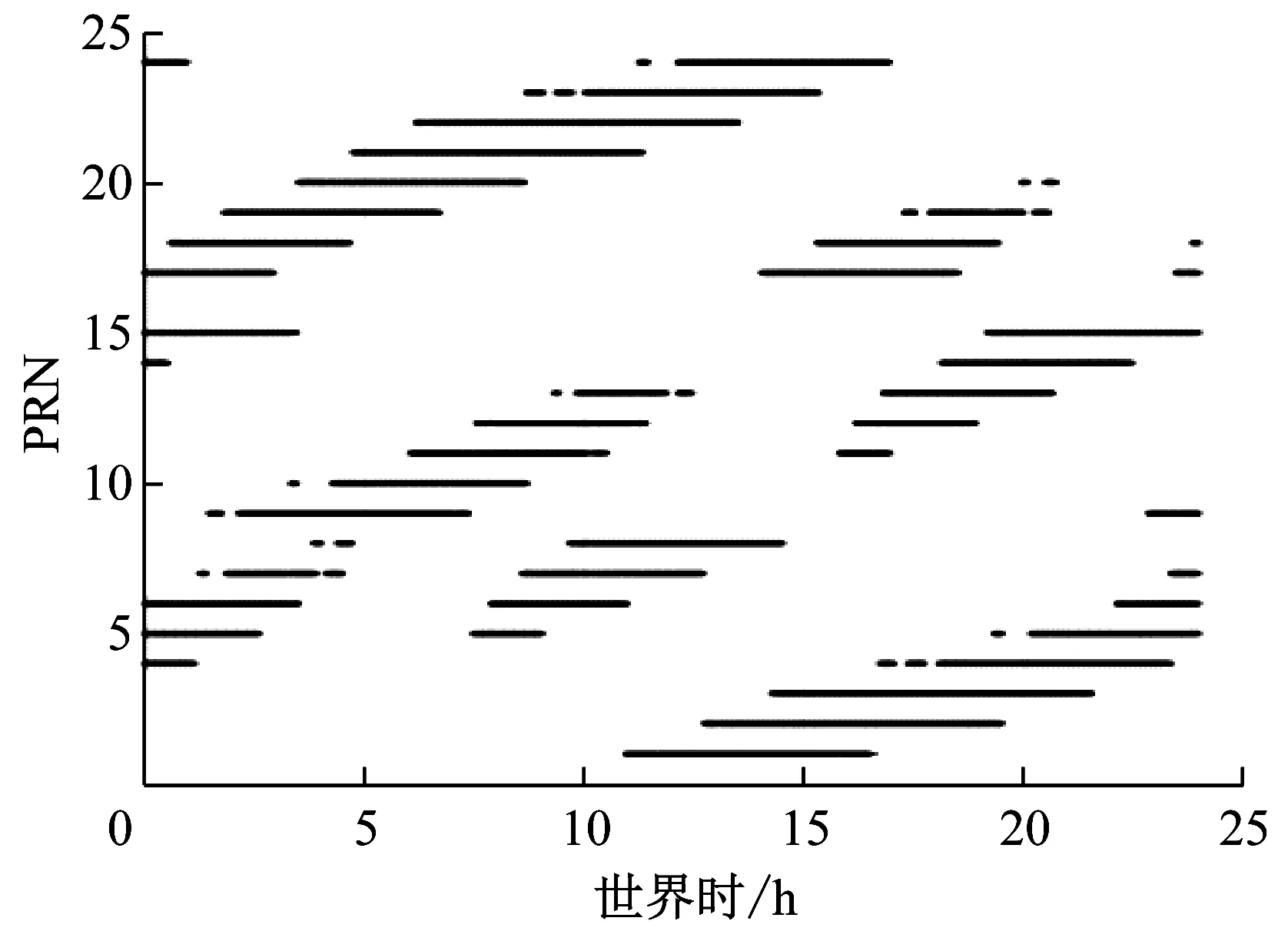
GPS卫星星座分布在六个倾角为55°的圆形轨道上,周期为11小时58分,轨高为19 130 km.GLONASS卫星星座分布在三个倾角为64.8°的轨道上,周期为11小时16分,轨高为21 150 km[4].不同的轨高及卫星运行周期导致不同时空分布特征.图7和图8表征了上海JSXC台站上空GPS和GLONASS卫星可见持续时间及数目的差异,GPS的可见持续时间要长,平均卫星数目比GLONASS要多约2.6颗星.
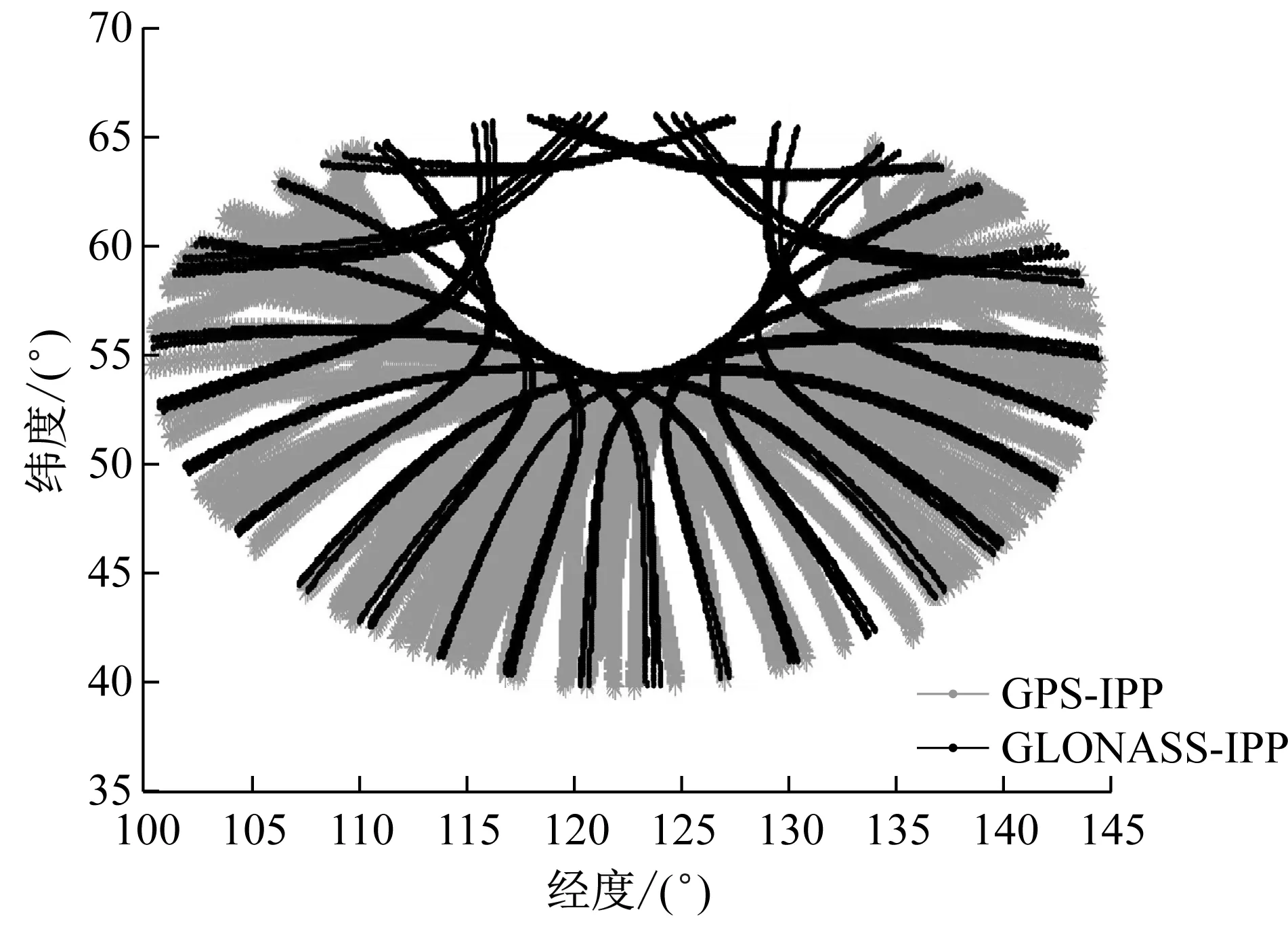
图9中,灰色代表GLONASS的穿刺点轨迹(IPP),黑色则代表GPS穿刺点轨迹.由于轨道倾角的差异,GLONASS的穿刺点轨迹所在纬度明显高于GPS,尤其在高纬地区覆盖面积更广.在中低纬地区,GLONASS穿刺点纬度要比GPS高2°~3°,在高纬地区可达4°~5°,这有利于高纬地区或极区电离层研究,但中低纬的覆盖范围不及GPS.另外,两个系统的频率和码率不同,GPS的码率为1.023 MHz,码长为1 023个码片,GLONASS的码率为0.511 MHz,码长为512个码片,不同的码率及码长会导致不同的码分辨率和伪距噪声.GPS较高的分辨率及较低的伪距噪声,和前面提及较多的卫星数目,使得GPS TEC计算精度优于GLONASSTEC[12-14].
a GLONASS

b GPS
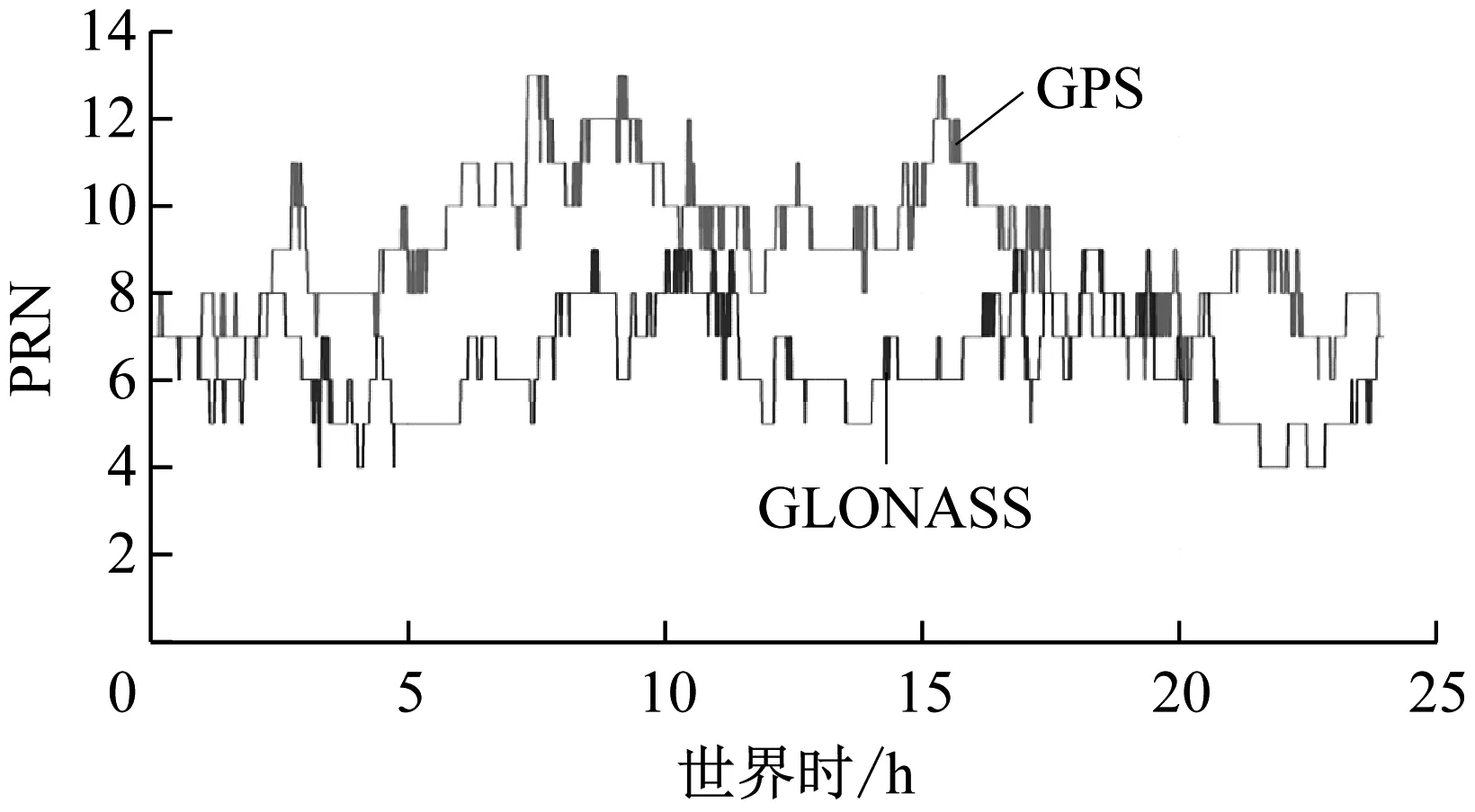
图8 JSXC台站上空GPS和GLONASS 卫星数目

a 海南台站
b 漠河台站
3.3 GPS和GLONASS的TEC差异与foF2及本地时关系
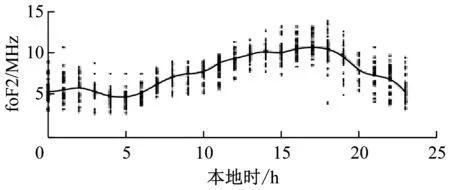
为了进一步研究TEC差异与F2层临界频率(foF2)以及本地时的关系,从子午工程海南和漠河台站获取了2014年7月至8月电离层测高仪数据,对foF2时间序列进行了提取分析,如图10和图11所示.
(1) foF2的变化对本地时具有一定的依赖性.如图10所示,图10a和图10b分别表示2014年7月至9月海南和漠河台站foF2与本地时关系,水平趋势线表示月均值.低纬台站foF2日间TEC STD要显著大于夜间,如海南台站foF2的日间STD为1.94 MHz,夜间STD为1.65 MHz.高纬台站foF2的日间与夜间STD的差异相近,夜间STD甚至要略大于日间STD,如漠河台站日间TEC STD为0.78 MHz,而夜间TEC STD达到1.12 MHz,夜间反而更强,这可能与夏季高纬地区的电离层夜间增强现象有关[15].
a 海南台站
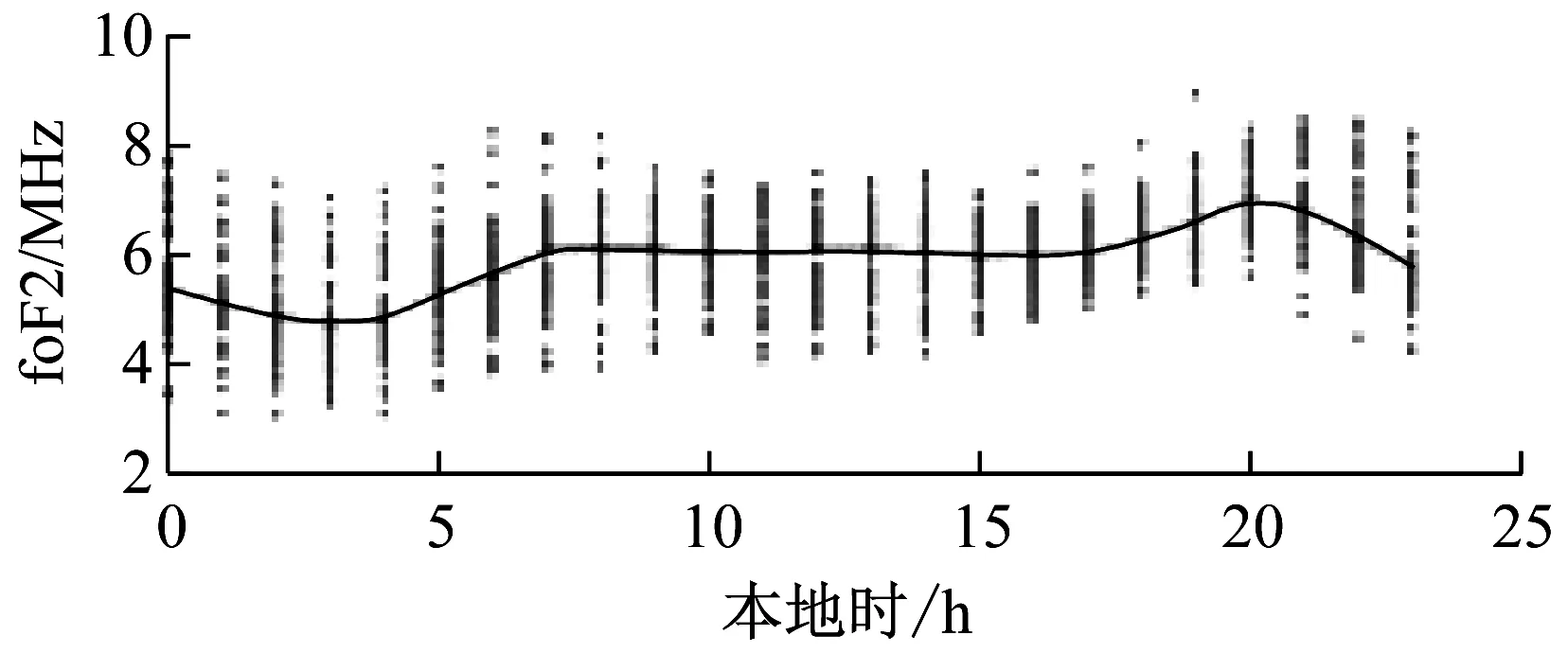
b 漠河台站
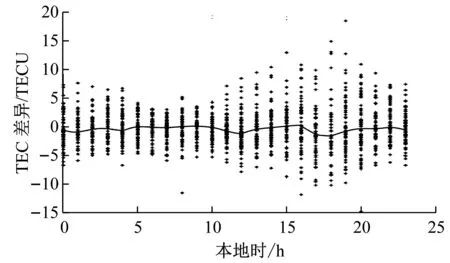
a 海南台站
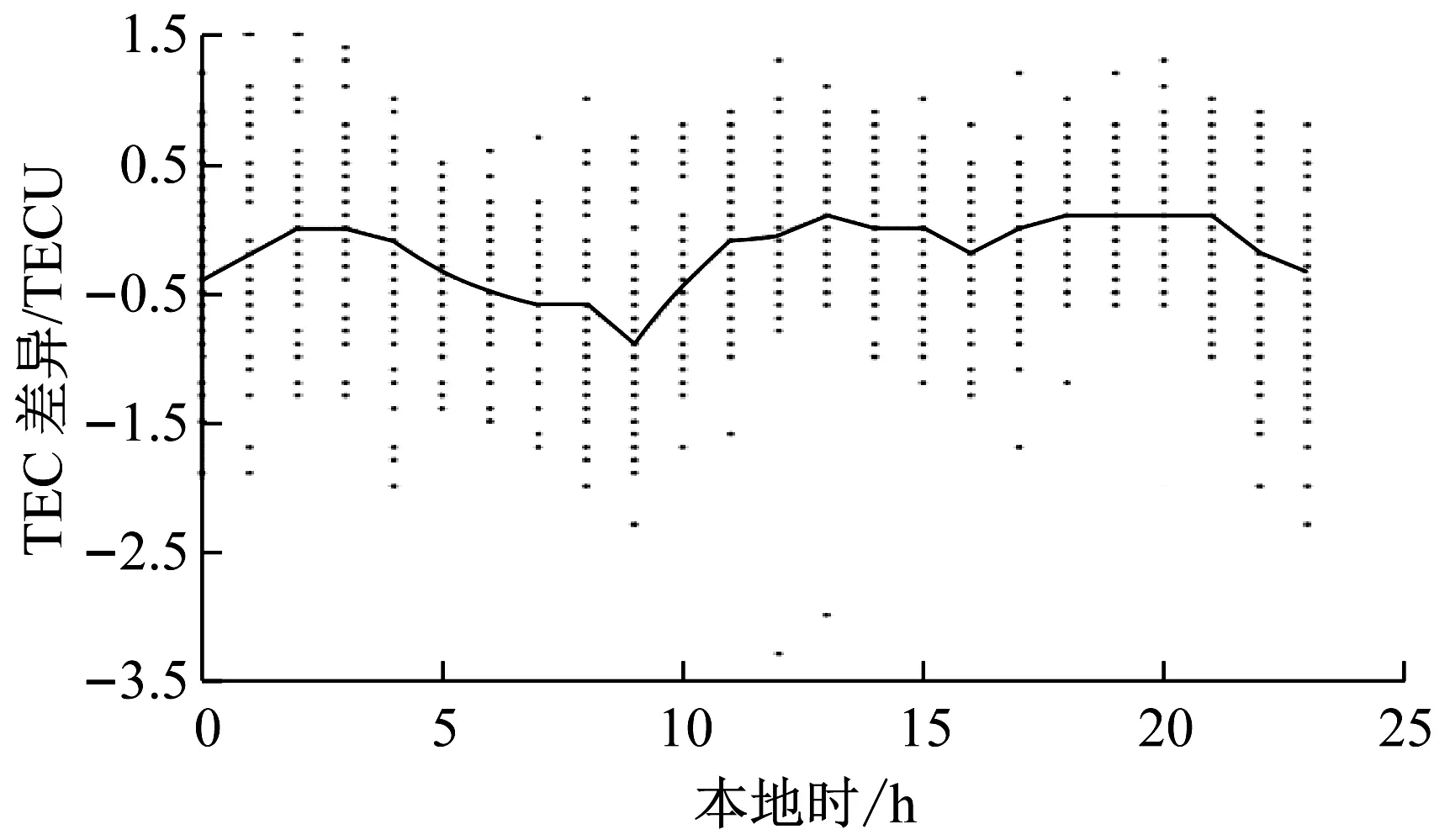
b 漠河台站
Fig.11 GPS TEC and GLONASS TEC difference variation with local time over Hainan and Mohe stations
(2) 低纬台站TEC差异在夜间相对稳定,在日间则变化相对剧烈,而高纬台站日间与夜间的系统差异变化并不明显.低纬海南台站,日间TEC差异的STD约为3.6 TECU,夜间TEC差异的STD约为2.6 TECU,而高纬漠河台站,日间TEC差异的STD约为0.5 TECU,夜间TEC差异的STD为0.6 TECU,如表4所示.
表4 GPS TEC和GLONASS TEC差异以及foF2的标准差在海南及漠河台站日间和夜间的对比
Table.4 STD of GPS TEC and GLONASS TEC difference and foF2 over Hainan and Mohe stations

台站日间foF2STD/MHz夜间foF2STD/MHz日间ΔTECSTD/MHz夜间ΔTECSTD/MHz海南1.941.653.62.6漠河0.781.120.50.6
4 GPS和GLONASS组合权重策略改进
基于以上GPS TEC和GLONASS TEC的差异性分析,综合本地时、纬度等相关关系,对GPS和GLONASS进行组合建模时,对GLONASS TEC的伪距观测权函数优化,如下所示:

式中:e为观测值高度角;σ2为观测噪声;f(φ)为 与纬度有关的权重系数;t为世界时(UT);β为地理经度.该函数假定在午夜时权重较大,正午时权重较小.GPS和GLONASS组合建模,与CODE GIM采用一致的256个台站,并以2014年DOY182世界时9时数据差异来绘图.原GLONASS与GPS观测权重比为5∶1[3],如图12a所示,原平均偏差为0.41 TECU,RMS为3.1 TECU;权重修改后, 如图12b所示,平均偏差为0.3 TECU,RMS为2.6 TECU.平均偏差改进约20%,RMS改进约15%.
5 结语
本文首先描述了基于GPS和GLONASS双频伪距相位观测值计算电离层的建模方法,对于全球区域采用15阶球谐函数模型,对中国区域则采用多项式模型.全球建模结果与CODE GIM计算结果相比,GLONASS估计的VTEC和DCB精度明显较差.与CODE GIM相比,GPS VTEC RMS及GLONASS VTEC RMS为2.3 TECU和4.6 TECU.GPS C1W-C2W的DCB差异在±0.15 ns以内,RMS为0.06 ns.GLONASS C1P-C2P的DCB在±0.60 ns以内,RMS为0.30 ns,计算结果基本可靠.中国区域建模TEC的月数据分析表明,GPS和GLONASS的TEC差异与纬度、星座配置以及本地时具有较明显关系.基于这些相关性,对于组合建模时GLONASS的伪距观测权函数,不再简单认定与GPS的权重比为5∶1,而是引入本地时、观测噪声以及纬度的关系来定义权函数,所得结果比之前平均偏差改进约20%,RMS改进约15%.后续工作中,需引入长时间全球数据对权函数进行优化,以进一步提高模型精度.
a 原定权VTEC与CODE GIM计算结果的差异

b 新定权VTEC与CODE GIM计算结果的差异
Fig.12 Comparison of GPS and GLONASS VTEC difference before and after modification and CODE GIM calculation results
