多要素气象观测无人机系统的设计与应用
2019-05-08
(广州市气象局,广州 511430)
0 引言
我国是世界上自然灾害最为严重的国家之一,尤其是气象灾害约占各类自然灾害的70%以上,因此,必须加强气象观测及相关灾害的预警体系建设,尽可能获得更加全面和精确的气象资料,为防御气象灾害和突发气象事件应急预警提供有力支持。传统的气象观测通常包括高空观测和地面观测。其中,高空观测主要是指基于气象卫星、探空气球、气象飞机、气象火箭等平台,利用观测仪器对大气中各个高度的气象状况进行探测;地面观测则主要指基于地面气象观测站,利用观测仪器,如气温计、雨量计、风廓线雷达、微波辐射计、激光雷达等,每日逐次不间断的收集观测资料。由于各种观测方式的观测范围、精确度、时效性、连续性等均有不同,因此又具有不同的应用领域。
近年来,随着计算机、无人驾驶、智能控制、传感器和气象观测等技术的不断创新发展和国内低空空域的开放,民用无人机在各领域的应用开始日益普及和成熟,使利用无人机服务于气象观测成为可能。由于其具有体积小、重量轻、易拆卸、使用灵活、精度高、成本低等各种优点[1],如能搭载合适的气象观测设备,则有可能为我们开展大城市小尺度精细化气象观测提供一种有效的手段和平台,弥补卫星观测、高空观测、地面观测等传统气象观测手段通常只适用于监测较大范围时间和空间尺度天气系统的不足,为开展低空气象探测技术研究、大城市精细化气象预报、应急救灾[2-3]、大气污染研究、城市规划论证、交通旅游服务以及气象科普宣传等应用提供有效的技术支撑。
国外对于气象观测无人机的研究,主要集中在研究探索领域,起步较早的如澳大利亚Aerosonde公司在1997年就发布了固定翼气象无人机并在该领域一直处于领先地位,美国、日本等国科学家先后利用该飞机成功进行过低空气象[4]和台风观测试验,如美国海洋大气局大西洋气象实验室用该无人机对奥费利娅(Ophelia)飓风进行了长时间的观测飞行[5]。我国自1997年起,在这方面也作了大量工作,并取得一定成效,如沈阳航天新光集团和装备指挥学院就共同研制了代号“TF-1”的气象探测无人机系统,可完成预定飞行区域内的大气温度、湿度、气压、风向、风速等要素的测量任务。2008年7月,中国大陆首次利用无人机探测方式对台风“海鸥”进行了探测,飞行时间3小时,高度500 m,距风眼最小距离100 km,获取了90%以上气象要素资料。但是,目前已有的气象观测无人机研究主要集中于固定翼、长航时、远距离中小型无人机平台,这类无人机平台在沙漠、高山、海洋、冰川等人员难以到达的偏远和危险地区适用性较好,特别适用于台风、洪涝等突发性自然灾害的特殊环境中,但也存在着起降条件要求高、操控专业性强、难以进行垂直观测等不利因素,影响了其适用范围。而近年来,随着微小型无人机技术的发展和成熟,特别是多旋翼无人机技术的迅速发展,为我们开展气象观测无人机技术研究开辟了一条新的途径,利用搭载各类气象载荷的多旋翼无人机起降灵活、操控简单、自由悬停、成本较低等特点,可为我们开展大城市小尺度精细化垂直气象观测及其时空演变研究,建立城市冠层气象观测体系,提供一种全新高效的平台[6-7]。
1 系统结构及原理
基于多旋翼无人机的多要素气象观测系统与其他类型的无人机系统相比,其外观结构、应用领域、性能指标均有所不同,但从系统原理和系统结构上讲,它同时也符合一个典型的无人机系统组成结构,如图1,主要包括无人机平台、气象观测载荷、地空通信模块、地面站系统等部分[8]。
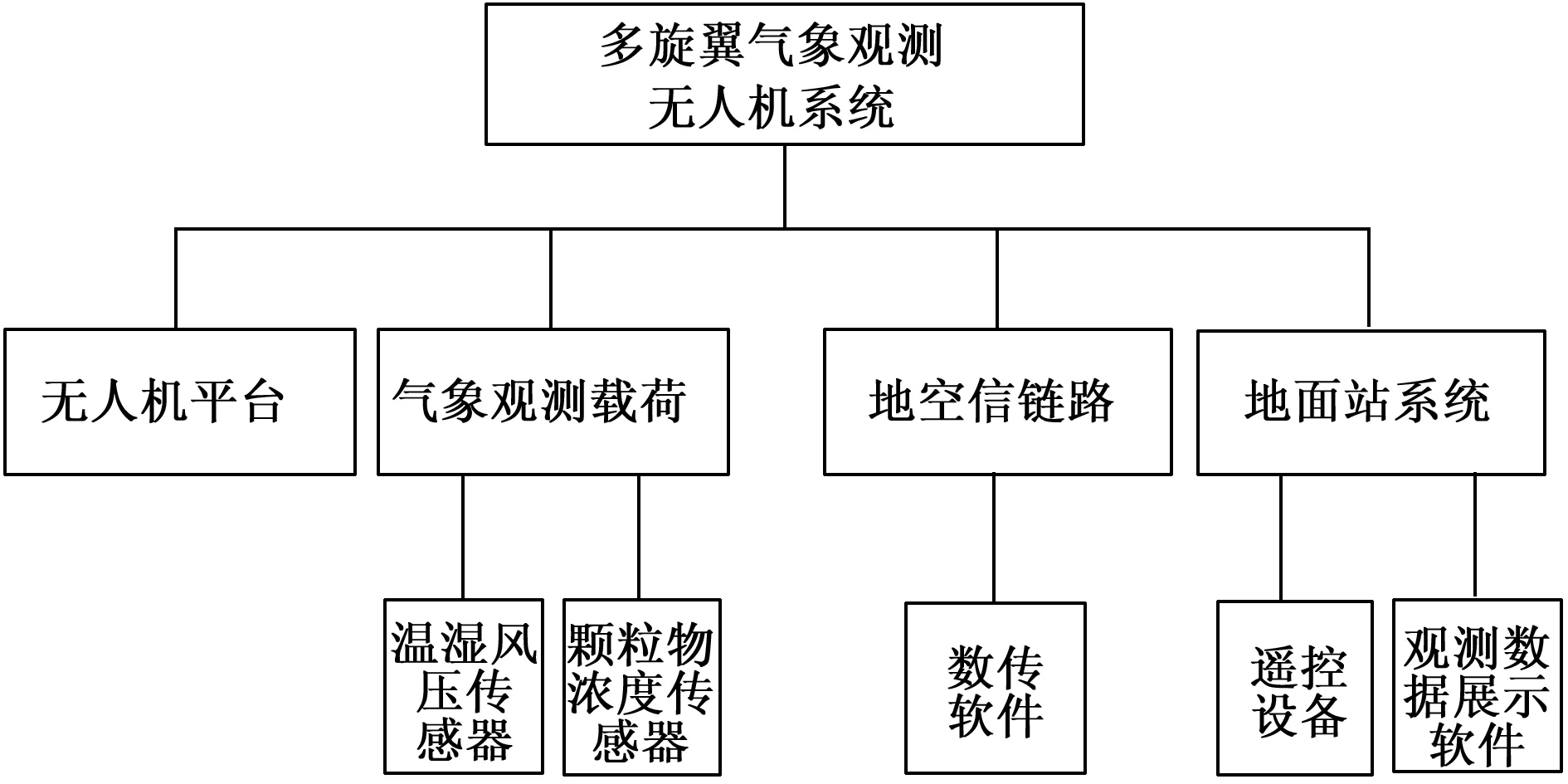
图1 多要素气象观测无人机系统组成
其中,无人机平台是整个气象探测系统的工作平台,采用GPS+惯性导航系统,具有自动导航、自动/手动驾驶功能,能在飞控系统控制下完成预定航线飞行,并实时传送飞参和探测数据。气象观测载荷由各类气象探测传感器及定制开发的数据采集模块组成,用于气温、相对湿度、风速风向、气压、颗粒物浓度等气象要素数据的收集和解析。地空通信模块主要负责通过2.4 GHz无线信道上传地面控制指令和下传飞机飞行状态参数及气象探测数据。地面站主要包括遥控设备、平板和状态监控软件、观测数据展示系统。
2 系统硬件设计
2.1 无人机平台
考虑到城市精细化小尺度气象观测的使用需求,多要素气象观测无人机系统选用可折叠六旋翼无人机平台(图2),该平台是一种十分成熟的机型,机械结构简单、负载能力强、可靠性高、噪音小,具备一定抗风和抗恶劣环境能力,最大有效载荷可达16 kg,由6组电机提供动力冗余,在单个电机或旋翼故障时,飞控仍然可以通过调整各电机输出维持飞机的平衡和控制。
其机身部分采用碳纤维材料,电机座连接件采用铝合金制作,配合防滑螺帽锁定,从而在降低机体重量的前提下,取得了较高的机械强度。动力系统则使用2组12 V锂电池(16000 mah)并联进行供电,通过六组外转子无刷直流电机驱动螺旋桨获得足够升力。飞控系统则由飞行控制器、姿态传感器和GPS定位系统组成,可支持预定航线自动飞行和完全手动控制飞行。

图2 六旋翼无人机平台
无人机平台主要性能指标如表1所示。
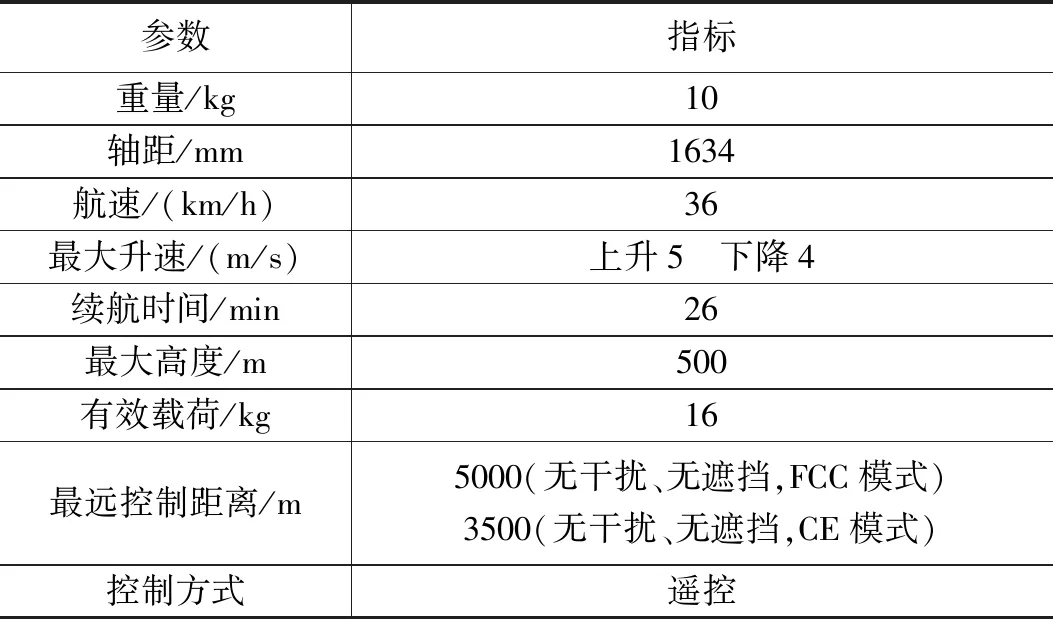
表1 无人机主要技术指标
2.2 气象载荷
气象载荷是无人机上用来完成气象观测任务使用的各种设备,是整个气象观测无人机系统最核心的组成部分。主要由温度、湿度、气压、风速、风向、颗粒物浓度传感器和数据采集模块构成,其工作原理如图3,数据采集模块采集到气象传感器数据后,通过飞控数据传输接口使用2.4 GHz无线信道回传到地面遥控器中,经过初步处理后再通过Google的AOA技术,将数据字节传输到地面站APP软件进行解析处理、校正纠偏并封装成Json指定格式的字符串通过Http协议以Post形式提交到数据库服务器,最终通过观测数据展示平台实时显示。
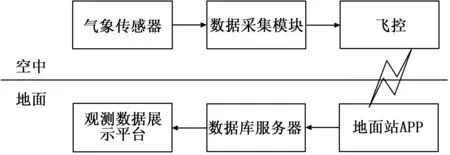
图3 数据流图
由于气象传感器性能好坏直接关系到观测任务完成质量,通过调研论证,温度、湿度、气压、风速、风向测量选用德国Lufft公司的WS800一体化气象站完成,该组件结构轻巧紧凑,集成多种气象要素传感器,尤其是使用超声波测风技术、MEMS电容测压技术、NTC热敏电阻测温技术、电容式测湿技术,仅重1.5 kg,适于通过固定支架安装于无人机上。通过基于Spalart-Allmaras模型对多旋翼无人机的流场仿真计算可得出,在无人机中心轴上气体流动较为平缓,且上方气流强度要远小于下方,对传感器测量干扰最小。因此,在保证无人机结构稳定性的前提下,将气象传感器安装于旋翼无人机安装于中心轴上方更适合传感器测量,使其尽可能不会受到无人机飞行时螺旋桨扰动气流影响[9]。颗粒物浓度测量则选用德国Grimm公司的11-E迷你激光粒径谱仪完成,其基于散射光测量技术,可获得空气中粒径0.25 μm到32 μm的颗粒物分布数据,仅重1.7 kg,适于安装于所选无人机机身内部,并且为保证仪器测量准确性,将探头引出至中心轴上部支架以采集空气样本。
整个气象载荷主要技术指标见表2。

表2 气象载荷主要技术指标
2.3 数据采集模块
数据采集模块是整个气象观测无人机的重要模块,负责完成读取、解析、回传机载气象传感设备和颗粒物浓度传感设备的探测数据,同时还要为各传感设备和其他器件供电,以及检测实时电压。因此,其主要由数据处理芯片、数据回传接口、数据读取接口、电源模块和电压检测模块几个部分组成。由于气象传感器采集数据的读取与解析需要进行大量的运算,故数据处理芯片选用了运算性能较强的意法半导体公司生产的STM32F103RCT6低功耗嵌入式微控制器开发[10],该处理器是针对低功耗和低成本应用而设计的高集成度32位嵌入式微控制器,采用了当前最为流行ARMCortex-M3内核,最高工作频率在72 MHz,内部4个16位定时器,最多可产生16路独立的PWM、2个12位精度A/D转换器,集成有各种通信接口(UART,SPI,I2C,SDIO),完全能够满足本设计的基本要求。数据回传接口即使用该处理器自带USART异步串口开发,配合外围通讯接口芯片SP3485和MAX3232,通过RS-485接口和RS-232接口每隔6 s分别采集、解析一次WS800和11-E的传感器数据。电源模块使用TPS54560、TPS54260、AMS1117-3.3作为电源芯片,其中TPS54560电源芯片为气象传感设备和颗粒物浓度传感设备提供12V直流电源,TPS54260电源芯片向LM358等IC提供5 V电源,而AMS1117-3.3为STM32F103RCT6处理器提供3.3 V电源。电压检测模块则使用LM358运放芯片对电池电压进行采样,使处理器能够实时读取电池电压。
由于处理器运行的是微型操作系统μC/OS-III,同时启动了两个任务分别处理气象传感器数据和颗粒物浓度仪数据,每个任务的处理类似且相对独立,其整个采集程序流程如图4所示。
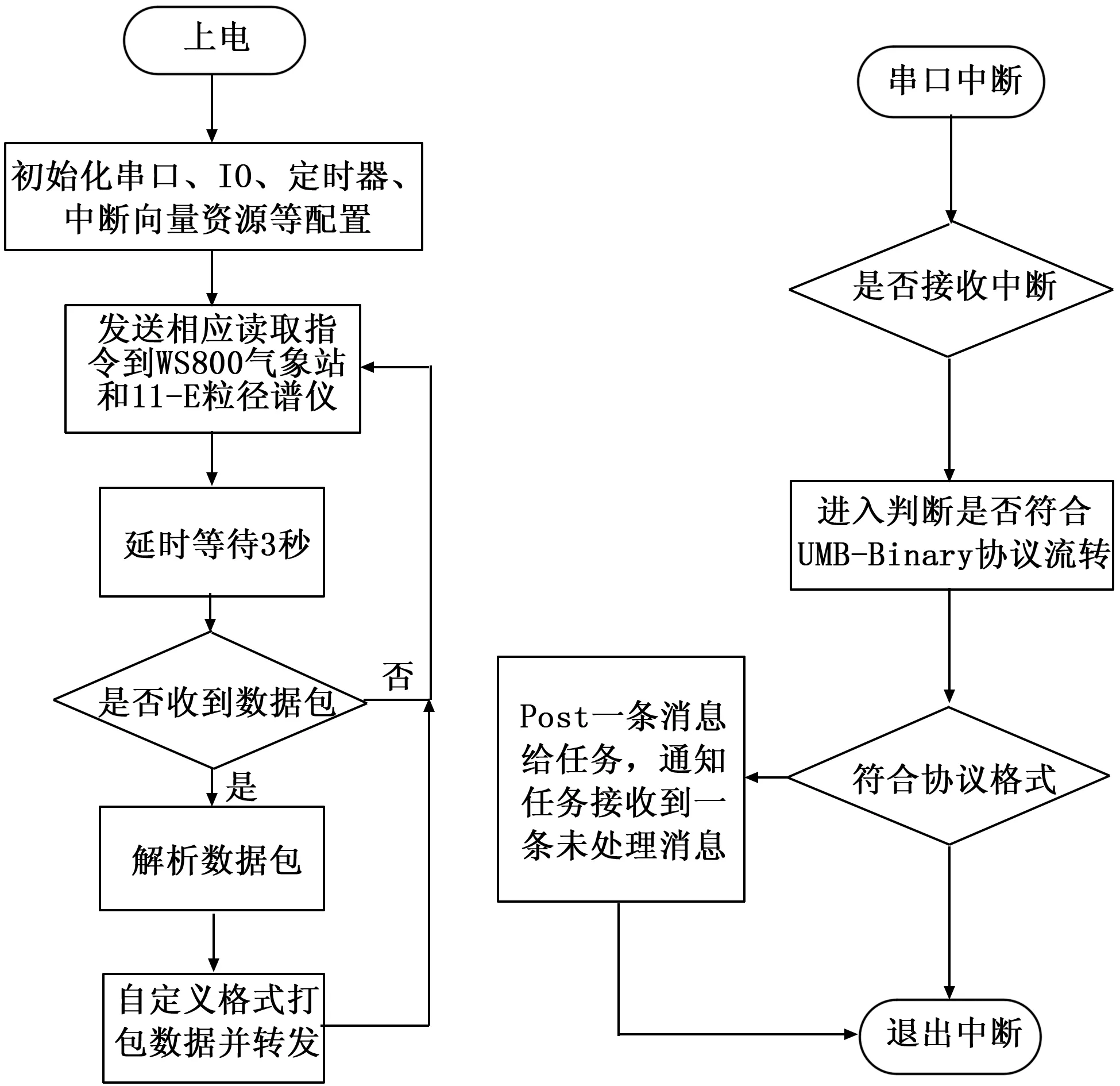
图4 数据传输模块流程图
3 系统软件设计
3.1 地面站控制软件
地面站是整个气象观测无人机系统的控制中心,由遥控设备、计算机、显示设备、通信设备等组成。主要功能包括控制无人机飞行姿态、无人机状态参数显示、任务规划、气象载荷数据显示及推送等[11],如图5所示。
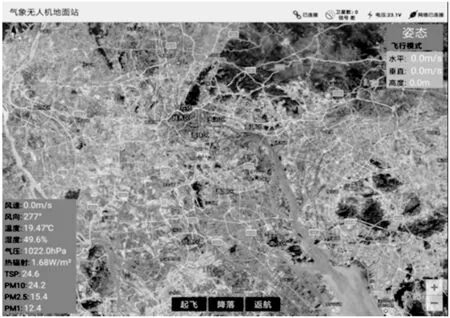
图5 地面站控制软件界面
运行于Android平台的地面站控制软件基于高德SDK和DJI SDK开发,其中高德SDK用于卫星地图显示和无人机的实时位置标记,DJI SDK则用于向遥控器发送飞行控制指令,接收处理飞控回传的飞机参数数据和气象传感设备数据。
当气象数据通过遥控设备回传到地面站Android设备之后,将按照不同的测量数据种类进行相应的解析(每种测量的数据均为4个字节单精度浮点数),最终得到具体的数据,显示到Android设备的屏幕上,并实时自动保存到本地目录下的csv文件中,此外,还需将数据封装成Json指定格式的字符串,通过Http协议将数据以Post形式推送到远端数据库服务器中供观测数据实时监控软件读取显示。
3.2 观测数据实时监控软件
无人机观测数据实时监控软件(图6)是整个气象观测无人机系统的最终用户界面[12]。其主要功能一方面是实时接收并以时间轴和仪表盘两种方式动态显示当前由地面站传回的温度、湿度、气压、风速、风向、全辐射、PM1、PM2.5、PM10、TSP等气象观测数据,同时在卫星地图上给出无人机当前位置和飞行状态参数,如高度、速度、俯仰角、航偏角;另一方面,软件还可支持读取后台数据库中存储的飞行历史数据,根据选择的日期按时间序列进行完整的动态数据回放和历史重演。
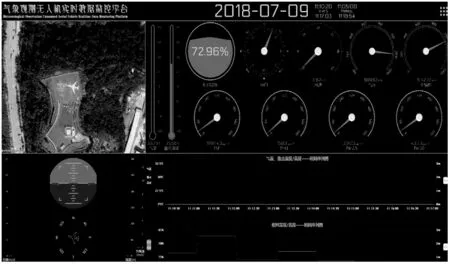
图6 无人机观测数据实时监控软件
软件采用WEB开发标准,基于B/S结构,使用ECMAScript 6.0、Html5、CSS3.0、Javascript等技术开发,其中,页面采用前端MVC框架设计,通过合理优化页面数据与视图的加载流程,可使用户轻松实现对无人机实时数据的滚动查看与监控,对于气象探测要素仪表盘和无人机飞行状态的展示则采用了SVG矢量图形技术+卫星地图的方式进行直观的可视化呈现,达到无变形任意缩放效果,实时数据通信方面则采用了WebSocket技术。
2.4 实验结果与分析
2016年9月~2018年7月,气象观测无人机系统进行了多次原理验证飞行实验及校对飞行实验,不仅测试了无人机系统与气象载荷设备的兼容性,还区分不同时间段不同高度层上进行了气象要素数据采集、传输以及与实验区域标准气象自动站数据的比对测试,通过试验验证了无人机观测数据的可信性和可靠性,获得了较满意的效果。图7为2018年7月9日在广州市黄埔区59287国家基本气象站观测场飞行试验所获取的气象要素数据,试验共分别飞行两架次,每架次分别在地面、相对高度75 m和相对高度150 m悬停采集数据,共获取数据738组;图8为2016年9月28日在广州市番禺区G1000区域气象自动站观测场飞行试验所获取的气象要素数据,实验飞行一架次,在地面、相对高度15 m、相对高度50 m和相对高度150 m共获取数据68组。通过将以上实验数据与相同时刻实验场地中气象观测场自动站的观测数据比对可得出:
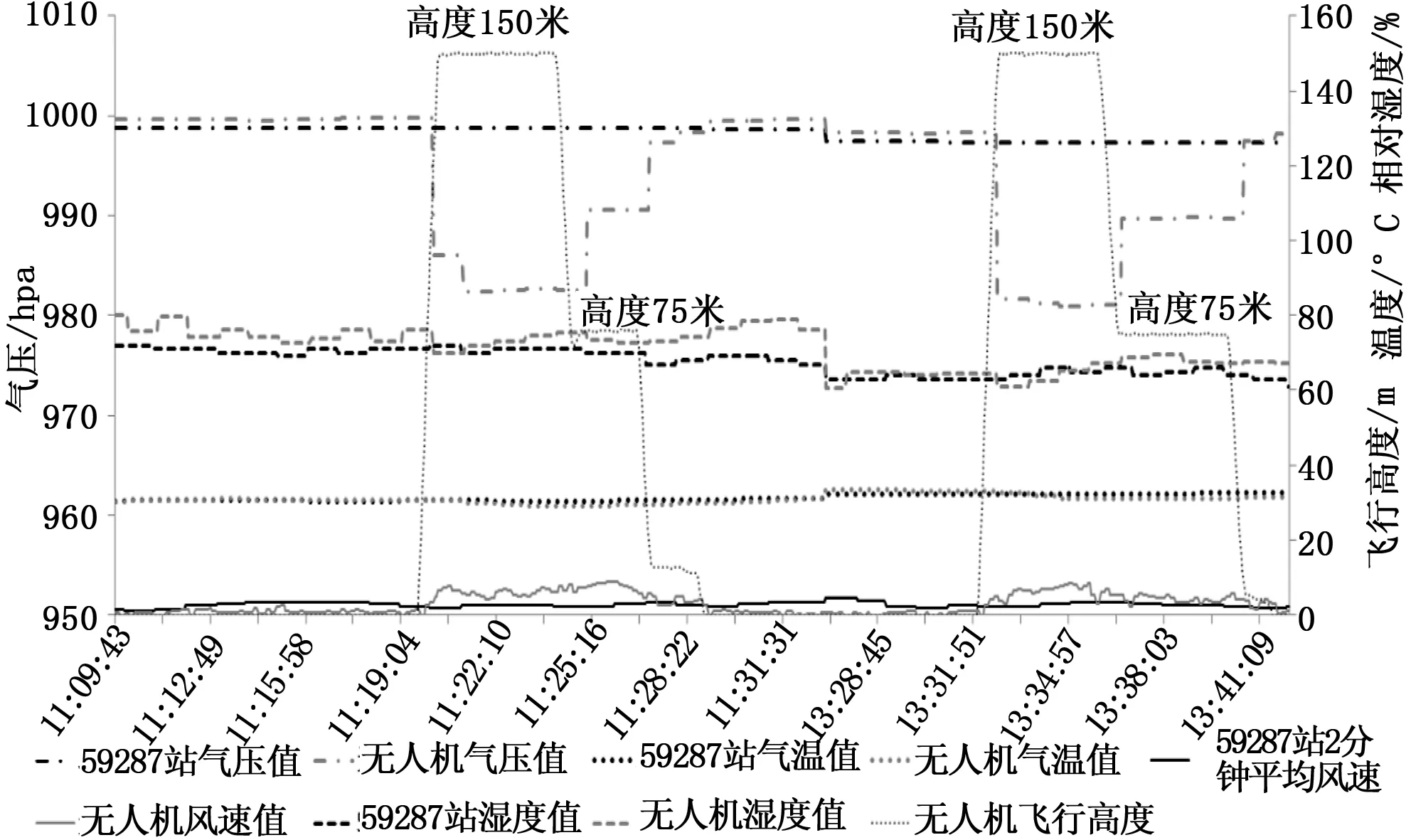
图7 2018年7月9日飞行试验数据
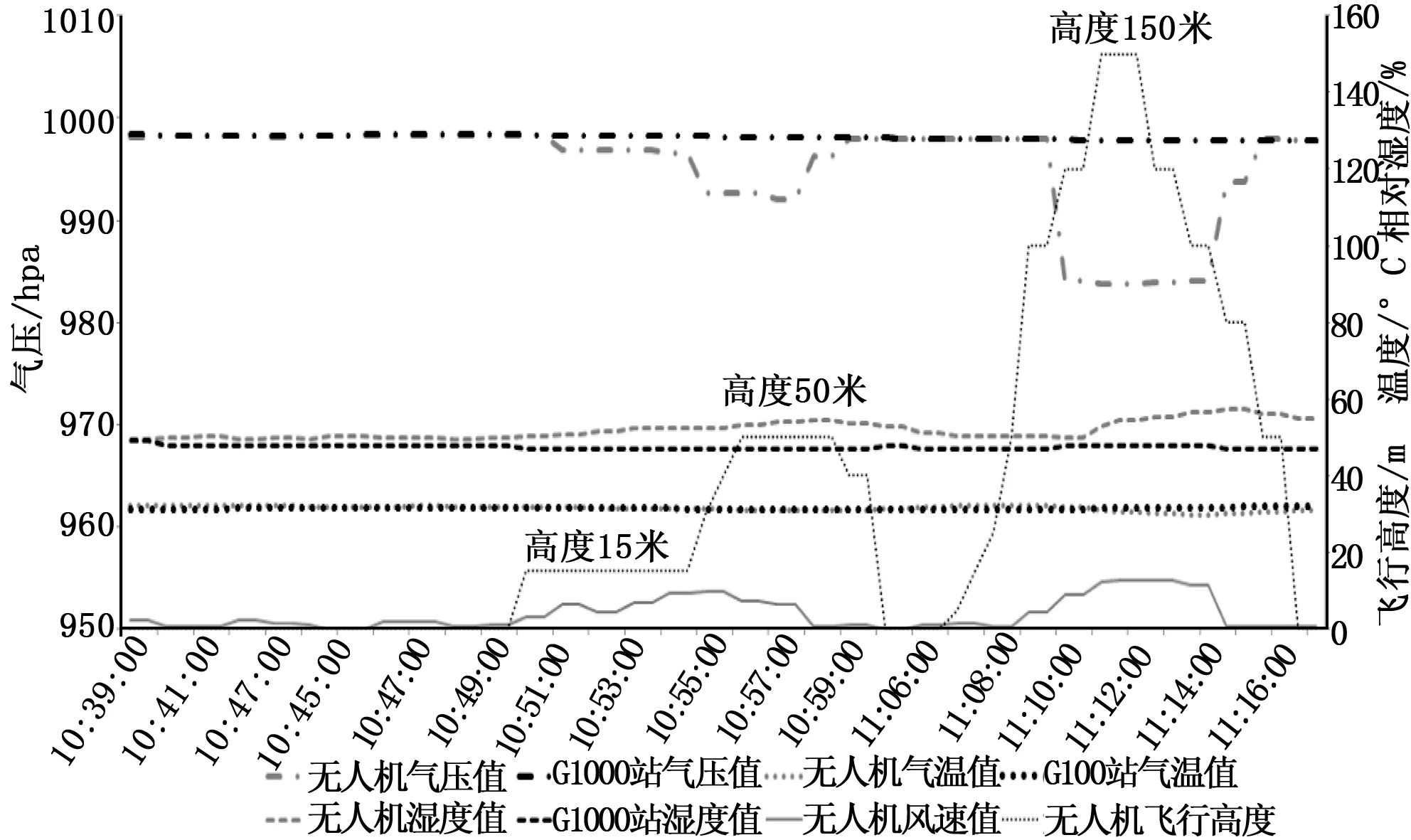
图8 2016年9月28日飞行试验数据
从多次实验数据的气温曲线上对比看,无人机在近地面(即相对高度为0 m)时,获取的气温值与地面气象自动站观测数据基本一致,偏差不超过0.2 ℃,随着无人机相对高度增加,气温呈略微下降趋势,符合气温垂直递减率,即标准大气压下,每上升100 m,气温下降0.6 ℃,体现出气温与高度变化的反相关性;从气压曲线的对比上看,无人机在近地面获取的气压值同样与地面气象自动站观测数据基本一致,偏差不超过1 hPa,随着无人机高度的上升,气压出现了显著的线性反相关性,相关系数达到了0.95,体现出了气压随高度增加的递减趋势;从相对湿度曲线对比上看,无人机在近地面所获取相对湿度值与地面气象自动站观测值基本一致,略微偏高5%,判断为传感器差异引
起,随着无人机高度增加,相对湿度值在当时环境下呈现出随高度增加的正相关性,同时,由于相对湿度的测量有一个时间过程,导致数据变化有一定迟滞性,所以反映在相对湿度变化曲线上有一定滞后;从风速曲线上,则可以看出空中风速相对于地面明显增大,符合真实情况[13]。
此外,2018年7月9日气象观测无人机系统在广州黄埔59287国家基本气象站观测场通过机载迷你激光粒径谱仪所采集的两个时段地面、80 m、150 m三个不同高度空气颗粒物浓度及高度数据如图9,从图中可得出实验地点在近地面三个不同高度范围内,颗粒物质浓度数据分布较均匀,PM10均值为34.96 μg/m3,PM2.5均值为20.45 μg/m3,与附近的广州市环保局科学城监测站实时数据基本一致,垂直方向上空气颗粒物质浓度无明显变化,空气质量优。

图9 2018年7月9日飞行实验颗粒物浓度数据
5 结束语
通过多次飞行试验的数据分析表明,本气象观测无人机系统设计方案科学合理,观测数据真实可信,其系统投资少,使用灵活方便,工作效率高,可为小尺度精细化气象观测提供一种新的技术平台和工具,有利于完善中小尺度、特别是小尺度天气观测系统,为大城市精细化气象预报服务提供更好的支撑;为开展低空大气污染物垂直结构及其时空演变的研究、城市热岛效应、城市内涝分析等方面提供第一手资料;还可应用于气象应急救灾、气象科普、环保监测、农业生产等领域,具有广泛的应用前景。下一步,还可就多架无人机组网协同观测、自主控制、抗干扰及续航等方面问题继续做进一步深入研究。
