一种小型陆空两栖机器人的选型分析与结构设计
2019-05-08罗庆生陈胤霏2刘星栋
罗庆生,陈胤霏2,刘星栋,朱 琛
(1.北京理工大学 机电学院,北京 100081; 2.广东省潮阳实验学校,广东 汕头 515100)
0 引言
为了适应灾害救援、资源勘探、野外侦查等复杂作业、复杂场景、复杂地形产生的特殊需求,可发展对外部环境有很强适应能力的陆空两栖机器人[1-2]。但这种新型的陆空两栖机器人要兼具地面运动能力和空中运动能力,其功能是地面机器人和飞行机器人的有机结合。常用的地面机器人有轮式、履带式、足式或复合式。足式机器人相对于轮式和履带式机器人来说,对于复杂的非结构化环境适应能力更强。在足式机器人中,四足机器人是最有应用前途的。飞行机器人常用的形式有固定翼、多旋翼、扑翼、直升机等形式,多旋翼相对于其他的形式有可控性强、机动性好等优势,是一种成本低,效率高的方案。因此文章所提出的陆空两栖机器人其构型方案是四足机器人和四旋翼飞行器的有机组合[3]。
1 小型陆空两栖机器人构型设计
文章拟研制一款适应于灾害救援、资源勘探和野外侦查的小型陆空两栖机器人。该机器人能在陆、空两栖条件下可靠运动,有一定的非结构地形适应能力;能实现陆地低角度侦查和空中高角度侦查;续航时间不小于30 min。为了更好的自主执行侦查任务,该机器人还应具备路径规划、目标识别和自主跟踪、自主返航和自主着陆等功能。
陆空两栖机器人常见的构型方式有一体式和组合式。一体式构型的案例如文献[1]和文献[2]所示,就是在现有飞行器的构型基础上,增加地面机器人的相关机构和运动功能。常见的地面机器人其运动形式有主动式和被动式,主动式即机器人本身带地面运动的驱动构件,如带有驱动的腿式构件或带有驱动的轮和履带等。被动式是指机器人实现地面运动的构件是在外力驱动下的,如文献[1]所示的笼式陆空两栖机器人就是在旋翼飞行器的推力作用下向前滚动的。
文章拟定的构型方案是将四旋翼飞行器和四足步行机器人的主体功能进行结合,使其兼具四旋翼飞行器的灵活性和四足机器人的地形适应性。空中飞行模式采用四旋翼飞行器完成,地面机动模式则采用四足步行机器人完成。考虑到四足机器人行走速度较慢,也可以采用轮腿复合式的运动机构。至于如何将四旋翼飞行器和四足步行机器人的运动功能有机结合起来是文章研究的重点。经过深思熟虑,将X型四旋翼飞行器的四条机臂沿机身的圆周均布,将四足步行机器人的四条腿也对称安置在机身的两边,出于机器人的结构应当尽量轻量化的考虑,可以将四旋翼飞行器的驱动电机固定在四足机器人的腿上。通过腿部自由度的运动,实现地面运动状态和空中飞行状态的切换。这个方案为一体式设计方案。另外一种方案是将四足步行机器人和四旋翼飞行器组合在一起,称为组合式设计方案。在该方案中,四足步行机器人作为地面基站使用,四旋翼飞行器可以自由的在四足步行机器人机体上起落,于是地面机器人和飞行机器人可以实现协同工作,以完成在不同环境、不同视角的侦查任务。
结合对现有任务的分析,初定该机器人的相关设计指标如表1所示。

表1 设计指标一览表
以上提出的两种方案各有其优缺点,文章将从方案的可行性、可维护性和成本控制等角度综合讨论这两种构型方案。
2 一体式机器人总体构型设计
一体式构型方案设计主要涉及到四足步行机器人的腿机构自由度设计、运动工作空间设计和四旋翼飞行器动力元件布置方案设计等。腿是足式动物运动的关键,腿的关节分布和各个关节间的几何关系奠定了生物实现各类复杂运动的基础。文章研究的四足机器人仿生腿机构设计,参考了自然界中的爬行动物如螃蟹、螳螂等的腿的分布形式。通过观察这些爬行动物,发现它们每条腿的主干部分大致可分为大腿、中间腿和小腿三部分,每条腿上有3个主动关节。对于陆空两栖机器人来讲,机体自身的重量直接关系到机器人的负载能力和续航能力,因此对机器人的机身机构进行必要的精简是机器人性能提升的必经之路。
2.1 基于两自由度腿机构的构型方案
从尽量保证该机器人机体轻量化角度考虑,首先拟采用两自由度腿机构。通过采用连杆机构,可用两个主动关节来实现该机器人行走所需的基本足端轨迹。和常用的三自由度腿机构相比,这时机器人可节省3个舵机。此时对应的机器人腿机构如图1所示。由图可以看出,该机器人的腿部采用了双摇杆机构,其中ac段为机器人的小腿,杆cd和杆be共同构成了机器人的中间腿,大腿为三杆副def。d和f为主动关节,构成了腿机构的两个自由度。旋转关节f决定机器人沿前进方向的运动,旋转关节d决定机器人的侧向运动。四旋翼飞行器的无刷电机固定在小腿段上,图1(a)和图1(b)分别代表了机器人行走时和飞行时的姿态。图2所示为机器人的整体构型,四条腿沿机身两侧对称分布,与机体相连的4个旋转关节呈正方形状分布,这样就可以保证在机器人的腿机构呈飞行姿态时,4个电机的位置可以满足四旋翼飞行器呈现X型布局。
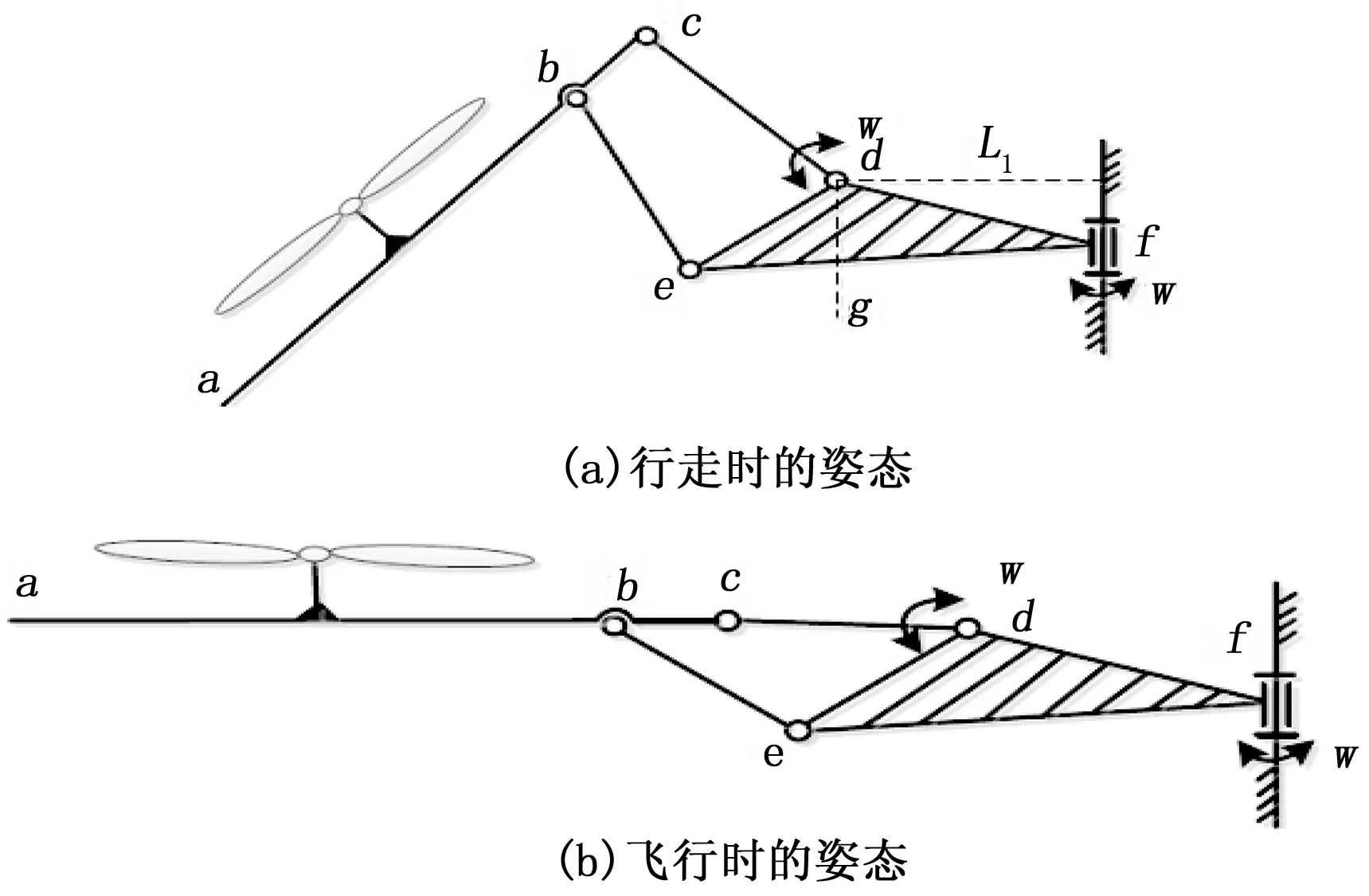
图1 小型陆空两栖机器人腿机构
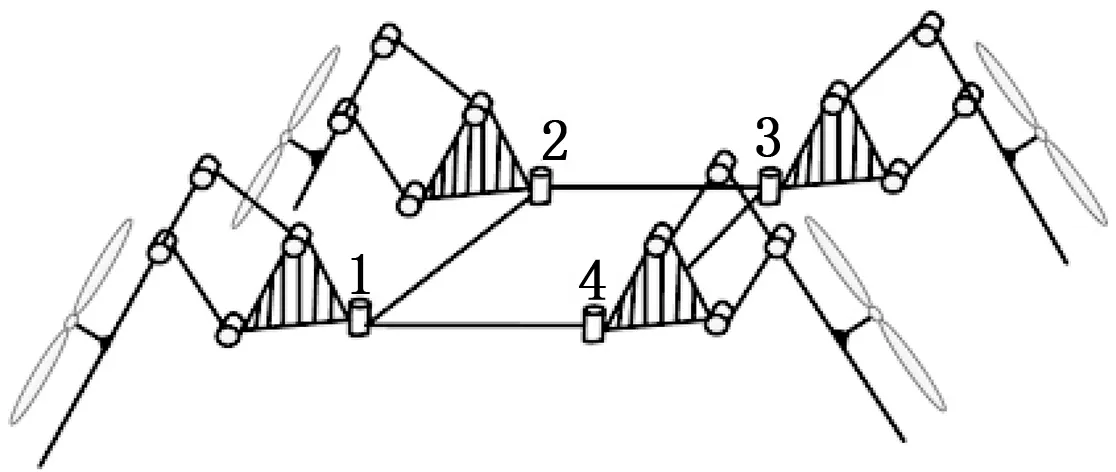
图2 小型陆空两栖机器人整体构型
当该机器人的四旋翼部分处于飞行状态时,要保持姿态稳定在很大程度上依赖机器人巧妙的构型。因此构型中的机构必须保证各关节位置控制的准确性和抗干扰性。在一体式陆空机器人构型方案中,为了保证机器人在飞行模式时的姿态稳定性,各关节的驱动采用数字伺服舵机完成,舵机可以控制关节旋转的角度和速度。除此之外,腿机构在飞行模式时,还利用了双摇杆机构的机械干涉位置,让电机轴和机身垂直,防止在升力作用下,舵机位置被拉偏,从而造成有效力矩的相互抵消和干扰力矩的形成,以此来帮助机器人保持机身姿态。最终确定的该机器人构型参数如表2所示。

表2 构型参数一览表
在该机器人结构设计和动力器件选型中,文章参考了机架为F330的四旋翼飞行器的配置方案。飞行模式所需器件选用了无刷直流电机、正反桨和3 s航模电池;关节运动采用数字舵机,单个舵机的运动范围为0~180°。所选动力器件如表3所示。
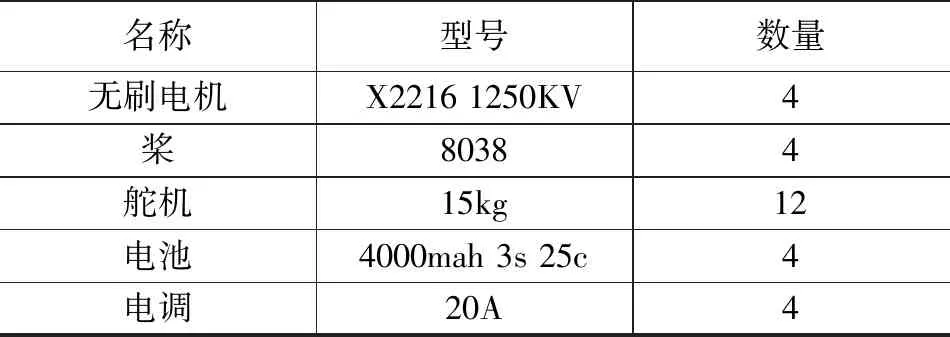
表3 标准器件选型一览表
当确定所有的标准器件后,即可进行机器人的造型设计,相应的三维模型如图3和图4所示,其中图3是腿机构的三维结构图,图4为机器人整机的三维实体图,其中图4(a)反映的是地面运动模式,图4(b)反映的是飞行模式。
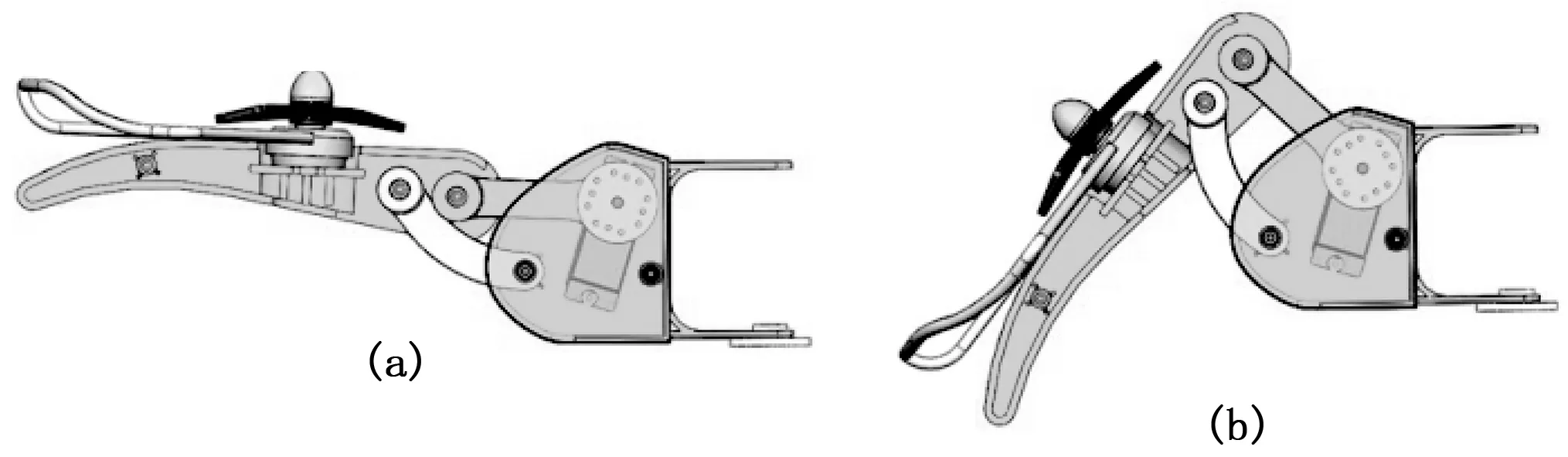
图3 腿机构实体造型图
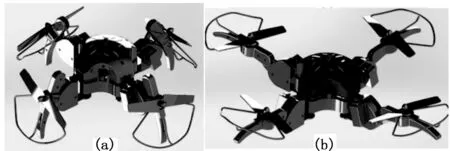
图4 机器人整体实体造型图
小型陆空两栖机器人实物样机如图5所示,其整机外壳采用3D打印技术制作,材质为PLA。通过样机运动效果检测实验发现,两自由度腿机构可以实现机器人的大部分步态[3],但腿机构描绘的足端轨迹相对固定,足端的可达域太小,运动灵活性相对较差,难以适应复杂的非结构化地貌环境。
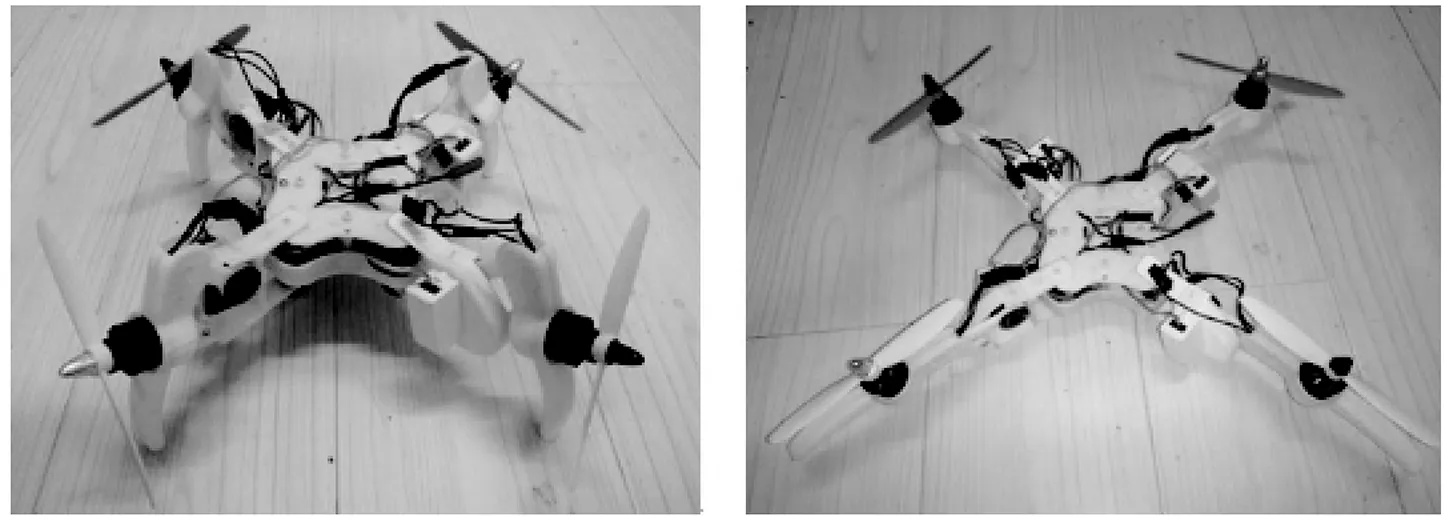
图5 两自由度腿机构的机器人实物样机
2.2 基于三自由度腿机构的构型方案
为了解决两自由度腿机构运动灵活性较差所带来的问题,尝试采用四足机器人最常用的三自由度腿机构进行构型设计[4],在这种构型中为机器人的髋关节、大腿关节和小腿关节各配置一个自由度,且将四旋翼飞行器的旋转电机与桨叶安装在机器人的小腿上[5-6],所述构型如图6所示,其中d关节固定于机器人的机体上,决定着机器人腿沿前进方向的摆动,而关节b和c垂直于d关节,决定着机器人腿沿侧向的运动。
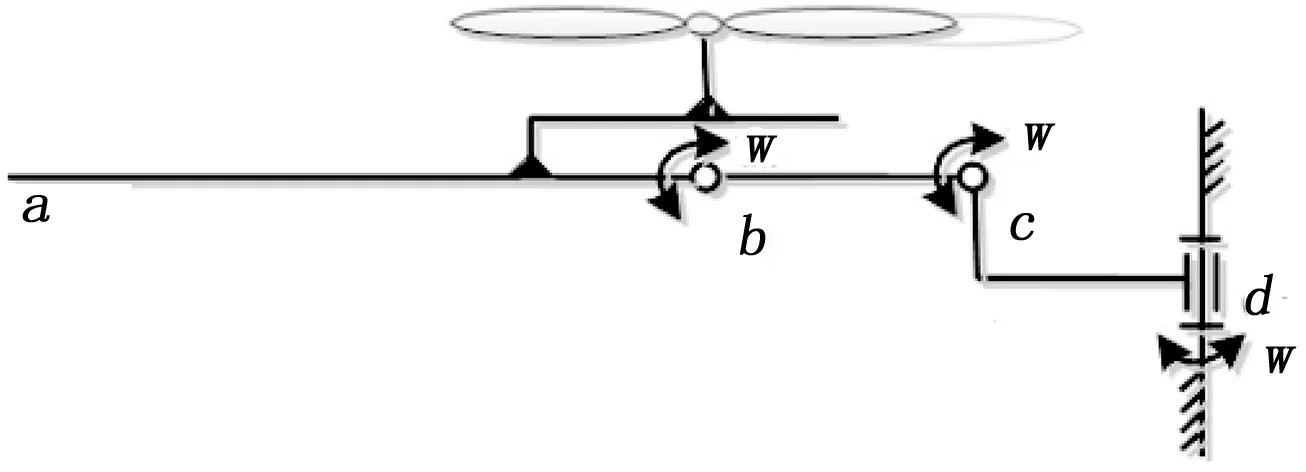
图6 三自由度腿机构构型
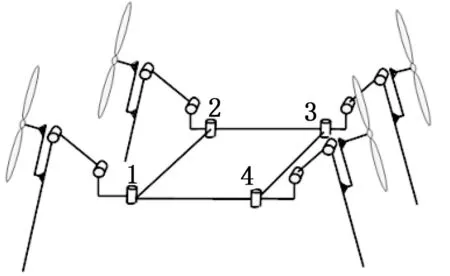
图7 三自由度腿机构整机构型
图7所示为三自由度腿机构机器人的整机构型,其中主体构型依然是仿爬行四足动物的造型。该机器人的四条腿均由三自由度腿机构组成,其中大腿关节轴线垂直于地面。表4所示为机器人相关的构型参数。
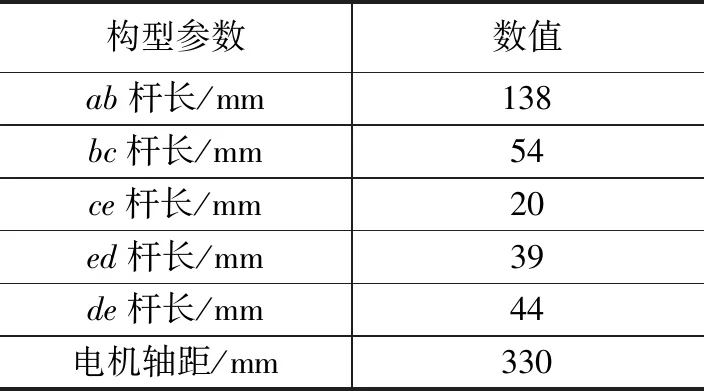
表4 三自由度腿机构机器人构型参数一览表
三自由度腿机构相对于两自由度腿机构而言,其足端的可达域范围明显提升,且具有更为丰富的足端轨迹,使得人们可以通过调整腿部的位置来调节机器人的重心,由此则增强了机器人对行走环境的适应能力。在机器人动力器件的选型中,关节驱动依然采用数字舵机,考虑到由于腿部自由度的增强,导致机器人整体重量的上升,舵机选用功率更大的RDS3115,其堵转扭矩为15 kg/cm。

图8 三自由度腿机构实体造型图
图8所示为三自由度腿机构实体造型,机器人整机的三维实体模型则如图9所示。为了尽可能实现机器人机体的轻量化,机体连接件采用轻质铝合金材料镂空制作,小腿关节采用亚克力材料,舵盘材料为塑料,机器人实物样机如图10所示。为了使机器人在飞行模式时能够稳定保持姿态,在设计腿部电机座时使电机轴反向延长线垂直通过舵机轴,且在电机座的结构上加装机械限位块,确保舵机在外力冲击下也不会发生旋转,以此保证小腿关节不受外加力矩的干扰[7]。
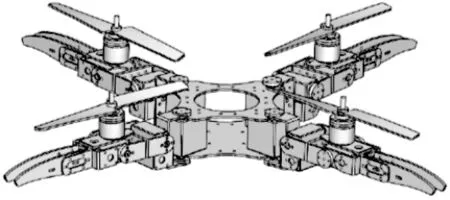
图9 机器人整机实体造型图

图10 三自由度腿机构机器人实物样机
3 组合式机器人总体构型设计
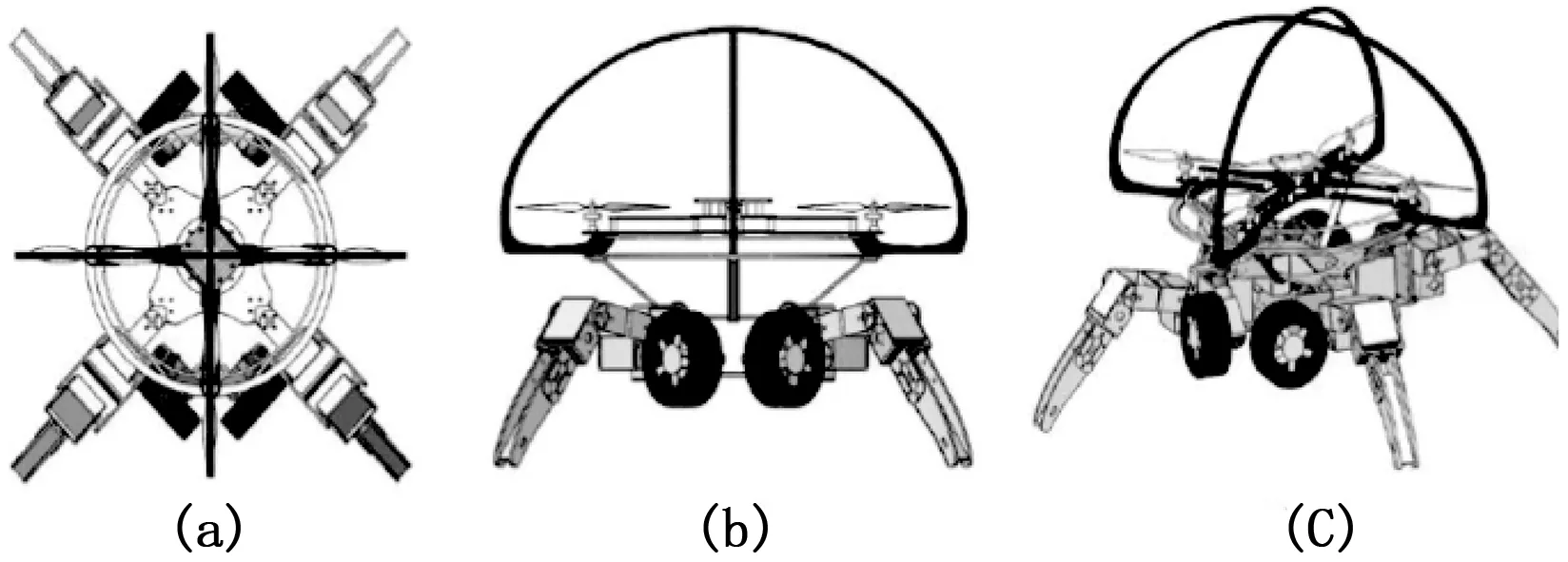
图11 组合式陆空两栖机器人
组合式机器人指的是机器人整体可以拆分为一个地面机器人和一个飞行机器人的方案,地面机器人给飞行机器人提供一个降落和起飞的平台[8]。相比于一体式机器人构型方案,因为移除了可变形的腿部机构,所以飞行机器人的质量有所减轻,飞行时机身的稳定性更高,续航时间也更长,并且对关节电机的依赖程度大大降低,提高了整机的可靠性。除了在飞行稳定性上有了较大提升外,组合式机器人也可以实现协同侦察,在节省能量方面还有一定的优势[9]。需要说明的是,组合式机器人的协同侦察是指地面机器人可以进行低角度拍摄,负责在一些飞行机器人难以到达的区域进行侦察;飞行机器人可以进行高空俯瞰,具有非常广阔的视野,负责较大范围内的全局侦察,还能够对地面机器人的侦察进行指导。从能量角度分析,飞行机器人通过搭乘地面机器人的方式可以节省自身的能量,保证较长的续航时间,因为同样重量的机器人,采用地面轮式方式前进所耗能量大约是飞行方式的一半[10]。文章所构想的小型陆空两栖机器人组合式构型方案包括一个地面机器人和一个飞行机器人,其三维模型如图11所示。由图可见,其中的地面机器人采用足轮混合式构型,该机器人的四条腿每条都有3个关节,和前文所述的一体式构型相同。在每条腿上装备带有驱动电机的轮式结构。轮子分布在机器人的头部和尾部,保证机器人拥有足够的足部运动空间。机器人结构设计依然沿袭了轻量化做法,腿部零件在保证强度的前提下采用镂空制作。轮式驱动电机采用带有减速器的直流电机。飞行机器人部分则采用标准无人机机架,其相关参数如表5所示。
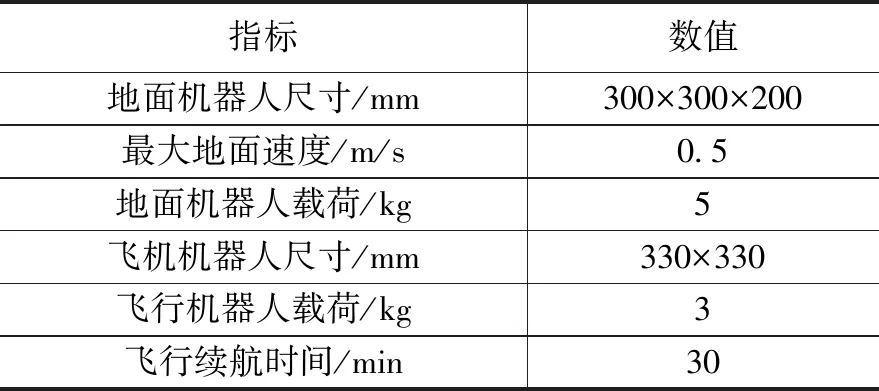
表5 组合式陆空两栖机器人相关参数一览表
4 实验结果与分析
文章对小型陆空两栖机器人的一体式方案和组合式方案分别进行了构型研究,两种方案在理论层面都是可行的,且在工程层面均能实现所需功能,但它们在实用性和可靠性等方面还是存在一些不同。通过对比,发现一体式方案在构型上更为巧妙,将机臂和腿机构结合在一起的想法使机器人系统在构型上大大简化,机器人轻量化的效果得到明显提升,整个机器人的集成度很高。但一体式方案也存在一些明显的不足。首先,从系统稳定性层面看,可旋转关节的设计与飞行器姿态的稳定性要求之间存在矛盾。由于机器人依靠腿关节运动,因此旋转自由度必不可少,而在飞行模式下,希望旋转关节有非常好的位置保持性能。正反桨所产生的升力以及飞行中遇到的气流波动均会对关节产生冲击,机器人非稳定降落或者飞行中碰到障碍物也会对关节电机产生冲击,这些冲击极有可能使电机的相对位置发生偏移,从而影响飞行器的飞行姿态,还极有可能损坏电机,因此对关节电机抗冲击性能要求很高,这点会和机器人低成本制造方案的要求相悖。其次,一体式方案在飞行状态下,机器人每条腿的腿关节电机必须同时工作,从而保持飞行器稳定的飞行姿态。12个伺服舵机同时长时间工作,将极大消耗电量,会显著缩短续航时间,不利于机器人相关作业任务的顺利实施。
组合式陆空两栖机器人构型方案和一体式方案相比,地面机器人和飞行机器人均保持了各自系统的完整性。飞行机器人是一个完整的旋翼飞行器,可以保证飞行的稳定性和续航时间。同时组合式方案的优势在于两个机器人的协同作业,飞行机器人在空中进行高角度侦查,提供全局视野。当获得目标信息后,指导地面机器人进行细节侦查和跟踪。通过这种协作,在提高侦查效率的同时保证了机器人系统的稳定性和续航时间。最后,在组合式方案中,地面机器人给飞行机器人提供了停泊的平台,有利于机器人的协作时位置的共享和机器人的回收。
综合来看,组合式方案相对于一体式方案而言,在功能性、实用性和稳定性等方面具有明显优势。
5 结语
文章主要研究了一种小型陆空两栖机器人的总体构型及其方案设计。首先根据该机器人要能实现陆地低角度侦查和空中高角度侦查的使用需求,深入开展了需求分析,确定该机器人要兼具地面运动能力和空中运动能力,其功能是地面机器人和飞行机器人的有机结合,据此提出了相应的设计指标,然后分别探讨了一体式和组合式两种设计方案,进行了机构的构型分析。在一体式构型方案中,对两自由度结构腿和三自由度结构腿分别进行了阐述与分析。最后综合对比了一体式构型方案和组合式构型方案,通过对优缺点的综合对比,得出组合式构型方案在功能性、实用性和稳定性等方面具有明显优势,为后续真实物理样机的研制提供了可靠、可信的依据。
