基于三维摄影测量的大型整流罩分离试验角点运动测量及分析
2019-05-08
(北京强度环境研究所, 北京 100076)
0 引言
整流罩是运载火箭有效载荷的保护装置,其作用是在运载火箭飞出大气层之前,为有效载荷提供免受气动力、热及声振等因素影响的环境。在运载火箭飞出大气层之后,整流罩任务完成,火箭需要抛掉整流罩以降低自身重量。为了保证整流罩的顺利分离,需要通过地面分离试验研究其在分离过程中的运动姿态、轨迹及内部包络空间等,为分离系统设计及相关结构优化提供依据[1]。
整流罩结构如图 1所示,通常为薄壁壳结构[2],在分离过程中由于受到气动力的影响,罩体结构发生弹性变形,产生“呼吸运动”。该运动会导致罩体与内部有效载荷的间隙发生变化,严重影响有效载荷的安全。仿真研究结果表明,“呼吸运动”对罩内可用包络空间影响最大的区域为圆柱端下端[3],即半罩角点位置。因此,如何准确的测量得到角点的运动轨迹参数是整流罩分离试验中的关键问题。以往研究整流罩角点运动主要有两个方法,第一是在整流罩内侧或者有效载荷模拟件上安装铅丝类的指示性测量装置,分离试验后观察是否有碰撞发生;第二种方法是通过俯视摄影机拍摄分离过程,并分析角点的运动。第一种方法只能定性的给出试验中角点与有效载荷模拟件是否有接触;第二种方法可以记录分离过程中角点的运动过程,但是俯视摄影机在整流罩尺寸较大的时候安装不便,从整流罩上方观察整流罩的下角点存在距离较远,镜头焦距偏长导致画面的稳定度不足,当整流罩有“倒锥”结构时俯视摄影机很容易被遮挡,导致数据缺失。

图1 单相机成像模型
针对上述问题,本文利用动态三维摄影测量技术,在大型整流罩分离试验中通过一组经过标定的高速摄影机从正面观测并记录整流罩角点区域在分离过程中的三维运动状态,通过对摄影机画面进行分析获得整流罩角点区域的运动轨迹,进而分析得到角点区域的呼吸运动规律及对罩内有效载荷的影响。
1 三维摄影测量技术原理
三维摄影测量技术(three dimensional photometry)[4-10]是一种利用数字图像进行测量的技术,其基本原理是:通过两个相机从不同角度拍摄被测物体表面,利用数字图像处理算法分析被测物体运动/变形前后的数字图像,获得被测物体表面预先设置的摄影标志的图像坐标,然后,结合各个相机的成像模型参数,计算出这些摄影标志测点的三维空间坐标,从而获得物体的运动轨迹/变形规律。
1.1 单相机成像模型
图2为摄影测量中的单相机成像模型,Ow-XwYwZw为世界坐标系,Oc-XcYcZc为相机光心坐标系,Os-xsys为前成像平面坐标系,Oi-xiyi为图像坐标系。点M=(Xw,Yw,Zw)与其在相机成像平面上的对应点m=(xi,yi)的关系为:
(1)
其中:f为相机镜头成像等效焦距,Sx和Sy分别为相机感光传感器平面上,两个方向上单位距离的像素个数,f、Sx和Sy是耦合在一起的,通常将组合后的参数fx=f·Sx和fy=f·Sy作为独立的相机成像某型参数。cx和cy分别为相机光轴与成像平面交点的图像坐标,上述四个参数通常被称为相机的内部参数,仅仅与相机的内部结构与镜头有关。旋转矩阵R=(r11,r12,…,r33)和平移向量T=(tx,ty,tz)是三维世界坐标系与相机光心坐标系的变换参数,总共有六个独立参数,这些被称为相机的外部参数,仅与相机的朝向和位置有关。
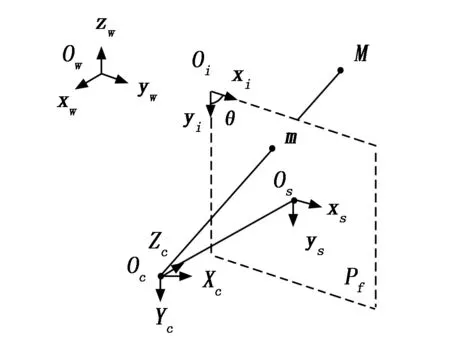
图2 单相机成像模型
1.2 双相机成像模型与三维重建


图3 双相机成像模型
使世界坐标系与左相机光心坐标系重合,则点M=(Xw,Yw,Zw)对于左右两个相机均可按式(1)列出其投影关系,联立后整理可以得到如下方程组:
(2)

在进行三维重建时,为了计算M点的三维坐标,首先通过图像匹配的方法获得该点在左右两个相机图像中的二维坐标,然后结合相机标定得到的14个双相机模型参数,利用最小二乘法求解式(2)即可得到(Xw,Yw,Zw)。
1.3 环形摄影标志点识别定位
标志点识别定位的目的是利用图像处理的手段计算得到被测标志点在图像中的像素坐标值。对于如图 4所示标志点,其圆心坐标(xi,yi)可由下式的灰度重心公式给出:
(3)
其中:G(m,n)为包含标志点的、大小为M×N的图像子区在像素坐标(m,n)处的灰度值。

图4 圆环摄影标志
1.4 相机标定
相机标定的目的是获取相机的内部参数和外部参数,标定结果的质量直接决定了三维重建的精度,是三维摄影测量的关键环节。相机标定的过程是:首先,制作表面带有摄影标志的标定物,通过测量手段,获得所有摄影标志的三维空间坐标。然后,使用相机拍摄标定物图像,利用图像处理算法,提取摄影标志点的图像坐标。最后,结合已知的摄影标志点三维空间坐标和图像坐标,使用相机标定算法求解式(2),获得所有的相机内外部参数。通常,相机标定先进行单相机标定,然后再进行双相机标定。Zhang标定法[11]和Tsai标定法[12]是目前两种应用较为广泛的相机标定方法。其中,Zhang标定法使用平面标定物(通常称为标定板)进行相机标定,只有在标定板尺寸不低于拍摄视场尺寸的30%时,才能得到较为满意的结果。由于本文中试验场景较大,大尺寸、高精度的标定板制作难度较高,难以实现,因此本文采用Tsai标定法完成相机标定工作。
相比于Zhang标定法,Tsai标定法仅要求拍摄一幅或者多幅包含所有摄影标志的图像即可解算所有相机成像模型参数,并不要求所有摄影标志处于同一空间平面上,对标定物制作的要求更低,更适合大视场情况下的试验场景。但是,Tasi标定法要求所有拍摄得到的摄影标志在世界坐标系中的三维坐标必须是已知的。
Tsai标定法的原理如下:对于视场内的每个摄影标志,由式(1)可得到如下关系式:
(4)
其中:
(5)
式(4)、(5)整理后可得:
dxy·xc(r21Xw+r22Yw+r23Zw+ty)=
yc(r11Xw+r12Yw+r13Zw+tx)
(6)
其中:xc=xi-cx,yc=yi-cy,dxy=fy/fx。通常,可以通过坐标平移的方法,使世界坐标系与相机光心坐标系之间的平移分量ty≠0。此时,方程两边同时除以ty,整理后得到:
(7)
其中未知向量T=(T1,T2,T3,T4,T5,T6,T7)T的表达式为:
(8)

(9)
求解旋转矩阵的分量(r31,r32,r33)可以利用旋转矩阵的性质。任取一个距离图像中心相对较远的摄影标志点,计算该点在前成像平面坐标系的坐标值(xc,yc)以及该点在相机光心坐标系中的坐标值(Xc,Yc),如果Xc与xc同号并且Yc与yc同号,则保留ty以及式(9)计算的参数值,否则,认为ty的值为负,重新利用式(9)计算所有参数的值。
为了确定fx,fy和tz的值,仍然根据式(4)得到以下关系:
[xcr31Xw+xcr32Yw+xcr33Zw]
(10)
同样对于N个摄影标志可以获得N个上述方程,利用最小二乘法求解后可得到fx和tz的值,再利用fy=fx·dxy计算得到fy的值。至此,Tsai标定法计算得到了所有的单相机成像模型参数。
2 整流罩地面分离试验
2.1 试验状态
如图5左图所示为试验中的整流罩分离试验示意图,整流罩圆柱段直径约为3.8 m。右图为试验前实际拍摄到的整流罩图像,试验中的测点个数为11个,编号为p0至p10,均为环形摄影标志,环形标志的图案由黑色圆环,黑色圆环外圆直径为200 mm,内圆直径为150 mm。试验前将摄影标志图案打印在多张标准A4尺寸的白纸上,粘贴至整流罩右半罩圆柱段底端。试验中采用的相机为Vision Research公司的Phantom V210高速相机,画面分辨率为1 280×800像素,拍摄速度为500帧/秒,拍摄的视场大小约为5 m(X向)×4 m(Y向)×1 m(Z向)。镜头选用是ZEISS公司Distagon定焦镜头,镜头焦距为50 mm。
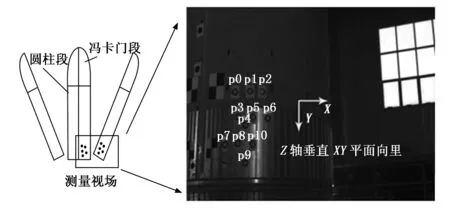
图5 所整流罩分离试验示意图
2.2 三维摄影测量系统标定
试验开始前先进行三维摄影测量系统双相机标定,标定方法是用Tsai标定法,该方法在标定时需要获得所有用于系统标定的标志点的三维空间坐标,本试验中使用全站仪测量这些标志点的三维空间坐标。全站仪(Electronic Total Station)是一种的三维坐标测量设备,其原理主要是利用光电测距系统进行距离测量,结合测量基座中的角度传感器,实现三维空间坐标测量[13]。
三维摄影测量系统标定过程如下:首先,架设全站仪,完成全站仪测量准备工作,使用全站仪测量所有整流罩半罩底端测点的三维空间坐标,并拍摄一组标定图像。然后,在升降车上布置摄影标志,如图 6所示,使升降车在测量视场中的多个位置停留,在每个停留位置,使用全站仪测量升降车上的测点坐标值,并拍摄一组标定图像。最后,利用环形标志点识别定位算法处理所有图像,获得测点图像坐标,将其与全站仪的测量结果进行对应,使用Tsai标定法解算得到三维摄影测量系统中左右相机的内部参数和外部参数,完成相机标定。

图6 试验前标定过程
2.3 试验过程与试验结果分析
试验开始前,首先将两台相机连接至高速相机同步控制器,使两台相机拍摄的图像同步。正式试验时,由起爆控制器发出点火信号(同时给同步控制器发出触发信号),整流罩分离面的分离装置工作,使整流罩解锁,之后,左右两半罩在转动驱动装置的作用下,绕底端转轴转动,转动至一定角度后,两半罩与转轴脱离,由回收装置回收。整个分离过程可以分为:1)初始段,即分离装置起爆前,整流罩处于静止状态;2)起爆段,整流罩受到分离装置的冲击载荷作用后的响应;3)转动段,整流罩在转动驱动装置的作用下绕转轴转动并达到过顶位置后继续转动;4)脱钩段,整流罩转动到一定角度后与转轴脱离跌落,完成分离动作。
图7所示为整流罩分离程中的五个典型时刻下,左右相机拍摄得到图像。对于每个阶段,利用环形摄影标志识别算法处理左右相机图像,得到整流罩底端的所有测点的图像坐标,根据测点的相对位置关系,将左右相机图像中测点进行配对,实现一一对应。所有测点的图像位置和配对结果也在图 7中标出。图8为测点p1、p4和p9在分离过程中的三维位移-时间历程曲线,图中时间零点为整流罩横向分离环起爆时刻,整个测量过程包括起爆前850 ms至起爆后5 348 ms,X方向位移最大达到约3 180 mm。


图8 各个测点的三维位移-时间历程曲线
图7 整流罩分离过程中的各个测点的匹配结果
为了获取整流罩在分离运动过程中绕Z轴转动的角位移和角速度-时间历程,选取测点p4和p9,计算两测点连线矢量绕Z轴转动角位移结果,再对角位移进行差分,得到角速度结果,如图9所示。从结果中可以看出,整流罩在转动段中首先在转动驱动装置作用下加速转动,作用结束后角速度开始下降,过顶后,受重力影响继续加速转动,直到脱离转轴。整流罩过顶时刻可以认为是分离弹簧作用结束后整流罩角速度达到最小值的时刻,即起爆后1 822 ms,过顶角度为12.5°,过顶角速度为8.9°/s。

图9 整流罩分离过程中的角位移和角速度-时间历程
整流罩在起爆段和转动段各个测点呼吸运动可从Z向位移-时间历程中获得,振动规律不明显,呼吸运动幅值约为20 mm。
3 结束语
三维摄影测量技术是一种光学非接触式的运动/变形测量技术,本文详细阐述了这项技术的测量原理,并将该技术应用于整流罩分离试验中,成功测量了整流罩在分离过程中角点的三维运动位移-时间历程,通过分析两个测点的运动得到了整流罩整体运动角位移和角速度-时间历程。整流罩分离运动较为平稳,角点处呼吸运动幅值大约为20 mm,过顶角度12.5°,过顶角速度为8.9°/s,过顶时间1 822 ms。试验结果表明,该项技术在大型结构体大范围分离运动测量方面是可靠、有效的。
