基于Mie散射理论的烟幕特性测量研究∗
2019-05-07张敬慧
张敬慧
(海军驻齐齐哈尔地区某部 齐齐哈尔 161041)
1 引言
发烟弹作为特种弹中一个品种,它在战争中起到特殊而重要的作用[1]。其烟幕的质量浓度和粒度分布是影响烟幕遮蔽性能的主要因素。随着新产品研发技术的不断发展,要进一步提升发烟弹的效能必须对新型发烟剂的测试方法进行改进,从而选用最恰当的材料和配比获得最佳的发烟效能[2]。现有的测试方法已不能完全满足新产品研发需求,例如吸湿性烟幕的质量浓度和粒度分布用滤膜称重法、电子显微镜法就无法实现精确测量。而利用激光散射技术可以实现所有烟幕的质量浓度和粒度分布测量。
2 试验原理
米氏散射理论表明,当激光束遇到粒子阻挡时,一部分光将发生散射现象,散射光的传播方向将与主光束的传播方向形成一个夹角θ,θ角的大小与粒子的大小有关,粒子越大,产生的散射光的θ角就越小;粒子越小,产生的散射光的θ角就越大。即小角度(θ)的散射光是有大颗粒引起的;大角度(θ)的散射光是由小粒子引起的[3]。散射光的强度代表该粒径粒子的数量。为了测量不同角度上的散射光的光强,需要运用光学手段对散射光进行处理。我们在光束中适当的位置上放置一个光学透镜,在该透镜后焦平面上放置一组多元光电探测器,不同角度的散射光通过光学透镜照射到多元光电探测器上时,光信号将被转换成电信号,再通过专用软件对这些信号进行处理,就会准确地得到粒度分布。进而计算出烟幕质量浓度[4],测试原理见图1。
3 实施技术途径
3.1 烟幕粒子粒度分布的测量
粒度分布与入射光之间的光散射规律服从经典的米氏理论(Mie Theory),它适用于一切大小和不同折射率的球形颗粒[5]。按照Mie理论,当一束强度为I0的自然光入射到各向同性的球形微粒时,其散射光强为

由光强公式(1),可求出单个烟幕粒子在多元光电探测器第n环上的散射光能为
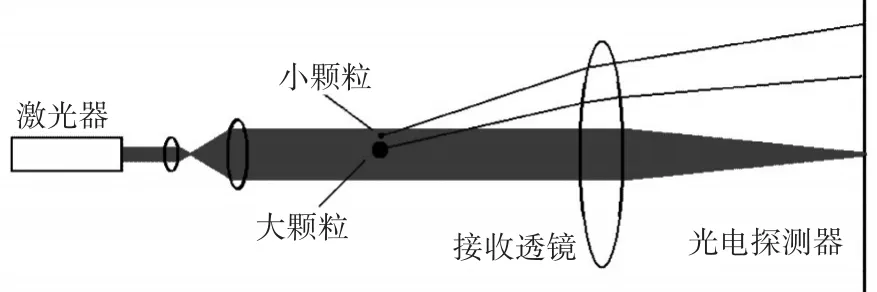
图1 试验原理示意图
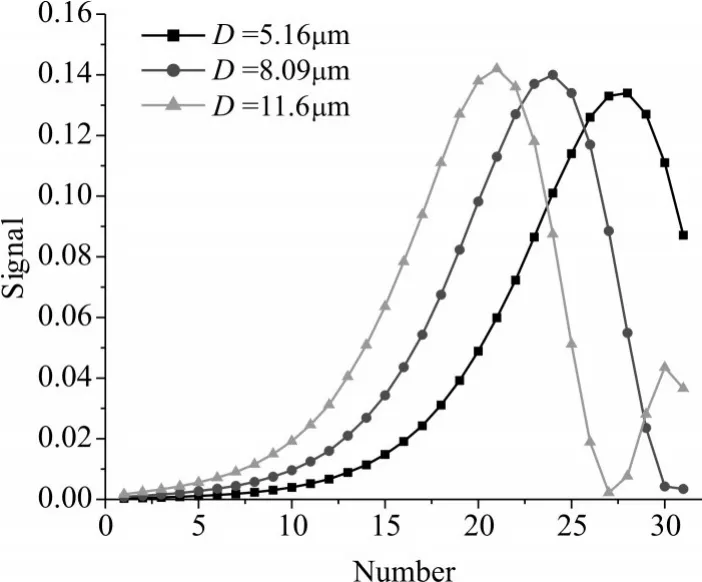
图2 粒子散射光能分布与粒度之间的关系
当测量区中有多个相同大小的粒子时,总散射光能是单个粒子散射光能与粒子数的乘积。而当出现在测量区中的所有粒子大小不等时,情况较为复杂。对此,可将这些出现在测量区中大小不一的粒子划分为几个组,每个组对应不同的粒径区间,属于某一个区间中的粒子可看作同等大小[7]。则在多元光电探测器第n环上的散射光能为来自于所有粒径区间的全部粒子散射光能的累加,即

考虑到通常情况下粒度分布按照粒子在不同粒径区间的重量划分,上式可转化成如下形式:

或改写为

C″为常数(在数据处理过程中可忽略不计)。式(5)也可更简单地写成矩阵形式,即

上式就是用Mie散射理论计算粒子在光电探测器各环上散射光能分布的计算公式。由于Mie散射理论自身比较复杂,对它的各有关物理量的计算常需编制专门的计算程序方能进行。
式(5)或者式(6)建立了散射光能与粒径之间的对应关系,如果粒子的尺寸分布(W1,W2,…,WK)已知,则由该式就可求得多元光电探测器上各个环的散射光能量(E1,E2,…,EM)。反之,如果由光电探测器检测到某一粒子在各个环上的散射光能分布,通过逆运算能够计算出与这个光能分布相对应的粒度分布。
目前所采用的逆运算方法大致上可以分为两大类,即分布函数限定法(又称非独立模式法)及自由分布法(又称独立模式法)。
分布函数限定法和自由分布算法在求解粒径分布时各有特点,不能绝对地说哪一个解法更好一些。分布函数限定解法的优点是求解速度比较快,适用于被测粒子的尺寸分布规律已知的场合。自由分布算法虽然比较复杂一些,但它可以用于被测粒子的尺寸分布规律未知或其分布规律比较复杂的情况[8~9]。
分布函数限定法:在分布函数限定法中,预先假定被测颗粒的尺寸分布符合某个特定的函数规律,常用的有R-R分布和对数正态分布NG。
在R-R分布中,假定粒径分布W即Wi≥0(i=1,2,…,K)满足:

而在NG分布中,假定粒度分布满足对数正态分布:

自由分布算法:自由分布算法较多,如迭代方法、投影算法、松弛算法、神经网路方法等。本文采用了投影方法,即把线性方程组中的每一个线性方程看作多维空间中的一个平面,线性方程组的解就是这许多平面的一个交点。因此,在多维空间中任意一点出发依次向各个平面投影,每次投影得到的点作为下一次投影的出发点,如此循环。则投影点将无限逼近交点即线性方程组的解。
3.2 浓度的测量
多元光电探测器的中心设置一个小孔,小孔后安装一个光电二极管,用于探测入射光强度和透射光信号强度。当测量区中不存在粒子时,接收到的是入射光强度;当存在粒子时,入射光中一部分光能被粒子散射和吸收,因此光电二极管的信号减弱,这种效应称为消光现象。通常定义透射光的强度与入射光强度之比为透过率,用符号T表示,见图3。
图3 多元光电探测器示意图
透过率与粒度分布组合可求解得到粒子浓度信息。透过率T和粒度分布函数W存在关系:

从理论上说,在不同浓度下测量得到的粒度分布函数应该一致的。而浓度不同导致透过率信号变化。因此,通过式(9),可以确定比例系数β并由此得到浓度CV。其关系如下:
然而,需要说明的是,以上关于粒度分布和浓度的测量都是建立在球形颗粒基础上。而烟雾粒子通常是非球形的,因此,测量得到的粒度分布会与实际情况稍有差别,这也导致测量得到的浓度偏离真值。所以,应在实际测量中对每种样品的球形度有个估计,或者对测量结果进行标定。
4 测试系统构成及技术参数
4.1 测试系统构成
测试系统根据Mie散射理论设计,由探测装置、信号采集模块和计算机三部分构成。其中:探测装置包括激光发射器、扩束器、光学透镜、测量区、接收透镜、光电探测器、信号处理模块等组成;数据采集模块负责将探测装置输出的模拟信号转化成数字信号送计算机处理;计算机需安装的软件包含了信号分析模块、结果显示模块、结果打印模块和结果保存调用模块[10]。其中,探测装置结构如图4所示。
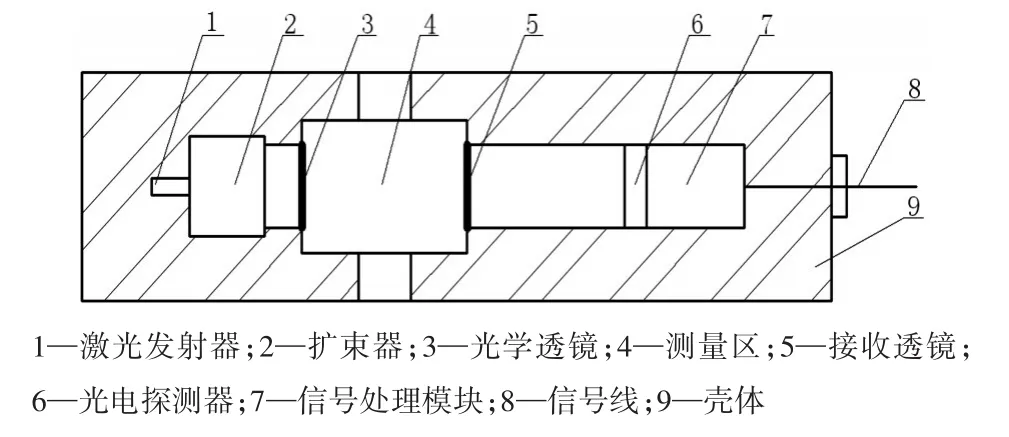
图4 探测装置示意图
4.2 主要技术参数
探测装置采用金属材料(如铝合金或不锈钢等)加工,外径约为100mm,测量区光程L=150mm,宽60mm;
半导体激光器输出波长633μm、额定功率大于10mW;
粒径测量范围为:1μm~60μm;
透过率范围为:0.3~0.95;
测量重复度优于2%。
5 关键技术及解决方案
首先,可测量的粒子浓度存在上限(最大浓度)和下限(最小浓度),当粒子浓度过高时,光散射中包含复散射成份(即颗粒的散射光再次被散射)增加,这会导致测量结构偏离实际情况;当粒子浓度过低时,散射光信号较弱,测量容易受杂散光影响。因此,测量区长度应考虑实际的测量需求合理地设计,使可测量浓度的上限和下限覆盖大部分测试情况,浓度范围以透过率表示为0.3~0.95之间最佳。对应的浓度可依据粒子平均粒径由如下公式计算:

其次,可测量的粒径范围也存在上限(即最大粒径)和下限(最小粒径),这涉及到接收透镜焦距、光电探测器参数、测量区长度这些参数,而测量区长度又关联到发射端和接收端光学系统的保护等技术问题。考虑上述诸多因素采用了专门设计加工的多元光电探测器与焦距为150mm的接收透镜搭配。其最佳测量粒径范围为1μm~60μm。
第三,探测装置光学系统的防污染问题。烟尘颗粒很容易污染光学系统,这会影响系统的工作性能和使用寿命。系统采用保护气达到防污染目的。在探测系统工作时,应调整供气气压,即能保护光学系统不受污染,同时又要避免保护气压力过大导致测量区中粒子被吹散从而影响测量结果[11]。
6 数据处理结构设计
包含了信号分析模块、结果显示模块,如图5所示,结果打印模块和结果保存调用模块。其中,信号分析模块:数据采集模块将信号送入信号分析模块,该模块提供了三种分析模式,即Freedom分布模式、RR分布模式、NG分布模式。根据数据采集模块送入的中心孔信号和散射光信号演算出粒度分布和浓度数据信息。在测量中根据要求可以选择三种模式中的一种。结果显示模块:模式分析出来的数据结果按三种方式进行显示、单次采集的结果详细信息显示、包括两根探针的颗粒分布详细信息和关键结果显示、数据对比图、连续测量结果趋势图;结果输出、保存模块主要负责对计算机处理完成的数据进行打开、保存和打印预览、打印的功能[12]。

图5 结果显示示意图
7 结语
通过对可用于烟幕质量浓度、粒度分布测量的原理及试验设备技术实施途径、结构设计、软件设计等技术内容进行了详细论述。经过验证其原理正确、实施技术途径可行、操作方便,只要对不同检测对象的探测区长度、激光发射器输出功率进行合理设计,并适当控制烟幕浓度等条件,文中论述的试验设备完全可用于烟幕质量浓度、粒度分布等物理参数的测量。
