BDS精密单点定位在桥梁变形监测中的应用
2019-05-07刘明亮丁克良刘亚杰于龙昊鲍东东
刘明亮,丁克良,刘亚杰,于龙昊,鲍东东
(北京建筑大学 测绘与城市空间信息学院,北京 100044)
0 引 言
桥梁变形会使桥梁的整体结构发生损坏,导致桥梁发生破裂或者坍塌,会对出行的人们的生命安全造成威胁.因此桥梁变形监测不仅可以实时掌握桥梁的整体变形情况和结构损伤,为桥梁的维护和修缮提供有效的数据支撑,还可以避免不必要的人员伤亡和经济损失.
传统的桥梁变形监测方法主要有全站仪测量、水准测量、摄影测量、GPS测量以及地基干涉雷达等,其中GPS监测可以获取监测点的高精度三维坐标,已经成为目前主要的监测手段.与传统方法相比,精密单点定位(PPP)技术只需要一台接收机,不需要参考站,不受距离限制,只需要根据IGS提供的精密星历以及钟差等产品,即可获取监测点的高精度三维坐标,具有成本低、操作简单、节省人力资源、方便高效的优点.随着我国北斗卫星导航系统(BDS)逐步完成亚太地区的组网,BDS已经具备独立定位导航能力,利用BDS进行建筑物变形监测将是必然趋势.自从BDS具备导航定位能力以来,国内很多学者对BDS的PPP技术做了研究分析,刘行波等[1]对BDS实时PPP进行了精度分析,发现与GPS实时PPP精度相当;李超等[2]对不同时长的BDS的PPP进行了精度分析,表明时长越长精度越高;王阅兵等[3]做了BDS与GPS的PPP精度的对比分析,发现BDS的PPP精度水平方向为1~2 cm,垂直方向为3~4 cm,但是随着BDS这几年的完善,精度一定会有所提高.
本文对某现役大型公路桥梁进行变形监测,利用采集到的1 Hz的GPS/BDS数据,基于PPP技术,分别对采集数据做静态和动态处理,分析桥梁动态变形情况下BDS的PPP精度,为今后桥梁变形监测提供一种新的监测方法.
1 精密单点定位(PPP)
PPP技术是指利用单台接收机,通过载波相位和码伪距方式,采用精密星历、高精度卫星轨道和钟差产品,通过一些误差改正模型或者参数估计的方法,精细考虑与卫星端、信号传播路径及接收机端有关误差对定位的影响,实现高精度定位的一种方法[4-5].
1.1 码观测方程
全球卫星导航系统(GNSS)接收机的基本观测量就是计算出卫星到接收机的传播时间,利用计算出来的传播时间和光速相乘,即可得到码观测方程或者伪距观测方程[6]:


(1)

1.2 载波相位观测方程
载波相位的观测方程表示为[7-8]

[φr(t0)-φs(t0)].
(2)

1.3 函数模型
消电离层组合模型是PPP中常用的模型,本次做BDS数据解算就是采用双频无电离层组合模型,根据文献[6]可知模型为
dr(hd(P(B1,B2)))+dmult(P(B1,B2))+
εP(B1,B2).
(3)
=ρ+c·dt+dtrop+NIF+BIF+
dmult(Φ(B1,B2))+εΦ(B1,B2),
(4)
其中:

(5)
(6)
式中:PIF、φIF分别为无电离层组合的伪距和相位观测值(m);f1、f2分别为B1和B2载波相位观测值的频率(MHz);λ1和λ2分别为B1和B2载波相位观测值的波长(m/周);N1和N2分别为B1和B2载波相位观测值的模糊度(周);ρ为卫星到地球的几何距离(m);c为真空中的光速(m/s);dt为接收机钟差(s);dtrop为对流层延迟误差(m);NIF为双频无电离层组合模糊度(m);BIF为双频无电离层组合初始相位偏差(m);其余项为载波的相位偏差、硬件延迟误差以及多路径效应;
1.4 参数随机模型
在PPP中,主要的参数有:三维坐标位置、接收机钟差、对流层天顶湿延迟和模糊度参数.本文所用的采集数据没有发生周跳,则整周模糊度为常数,其余参数的确定采用卡尔曼滤波的随机模型.离散一阶高斯马尔可夫过程可表示为[7]:

(7)
式中:x为状态向量;τ为相关时间;ω为零均值的白噪声序列;Δt为采用间隔;
可得到状态转移矩阵和动态噪声方差阵:

(8)
式中,q为谱密度或者动态噪声的方差.
当τ→0时,一阶高斯马尔可夫过程模型为纯白噪声:
(9)
当τ→∞时,为纯随机游走过程:

(10)
对于静态PPP,三维坐标的参数方差阵可以表示为
(11)
式中:qφ,qλ,qh分别为纬度、精度、高程方向的谱密度;Rm,Rn分别为子午圈曲率半径和卯酉圈曲率半径;h为测站大地高;
接收机钟差参数方差阵为随机游走时表示为
Qclk=[qdtΔt],
(12)
为纯白噪声时表示为
(13)
式中:qdt为接收机钟谱密度;βdt为接收机钟差参数的阻尼系数;
对流层天顶湿延迟通常表示为随机游走模型.
Qtrop=[qtropΔt],
(14)
式中,qtrop为接收机钟谱密度,由流层延迟变化率决定;
在参数处理时,模糊度当做常数处理,表示为:
QN=0.
(15)
2 工程实例分析
2.1 北斗静态PPP精度分析
数据利用实际工程监测数据,监测时间为2017年4月8日上午7:00—9:00,选取最后一小时监测数据进行处理,监测目标为北京市某现役大型公路桥梁,在桥梁一侧布设三个监测点(JCD1,JCD2,JCD3),并在桥下布设了一个基准点(JZD1),采用可以接收BDS数据的华测接收机,采样间隔设置为1 s,连续监测一小时左右,监测时需要至少可以接收到4颗以上BDS卫星.
为了验证BDS静态PPP精度,采用GAMIT软件对三个监测点进行BDS端基线解算,并用GAMIT里面的网平差模块GLOBK进行网平差.该软件最新版本10.61可以对BDS数据进行解算,采用精密星历和高精度起算点,精度可达毫米级,与解算GPS数据精度基本一致.本文以GAMIT解算出来的网平差坐标作为参考基准检验BDS静态PPP定位结果精度.
RTKLIB软件是一个用于GNSS的开放源程序包,可实现标准和精确定位.本文使用最新版本的RTKLIB2.4.3并对其开源代码做本文需要的改动,以实现三个监测点的BDS静态PPP坐标解算.解算之前需检查监测区域上空卫星分布情况,如图1所示.

图1 监测区域卫星视图
由图1所知,变形监测时能同时接收到的GPS和BDS卫星都大于4颗,监测环境良好,能实现高精度定位.
对三个监测点做BDS静态PPP处理,对比分析这三个监测点的BDS精密定位坐标与网平差三维坐标的结果,如表1所示.

表1 北斗静态PPP与GAMIT解算结果对比

表1(续)
由表1所知,在连续 1 h的变形监测中,BDS的PPP水平向精度可以达到1~1.5 cm,竖直向精度可以达到1~2 cm.
2.2 北斗动态PPP精度分析
由于篇幅限制,且JCD1和JCD3是对称放置,只需要对JCD1和JCD2做数据解算处理分析,为了检验北斗动态PPP在现役桥梁监测现场复杂环境下,进行单历元解算BDS动态PPP能否监测出桥梁的动态变形情况,只分析解算之后的竖直向坐标,并同解算出单历元GPS动态PPP数据,与BDS数据进行比较:
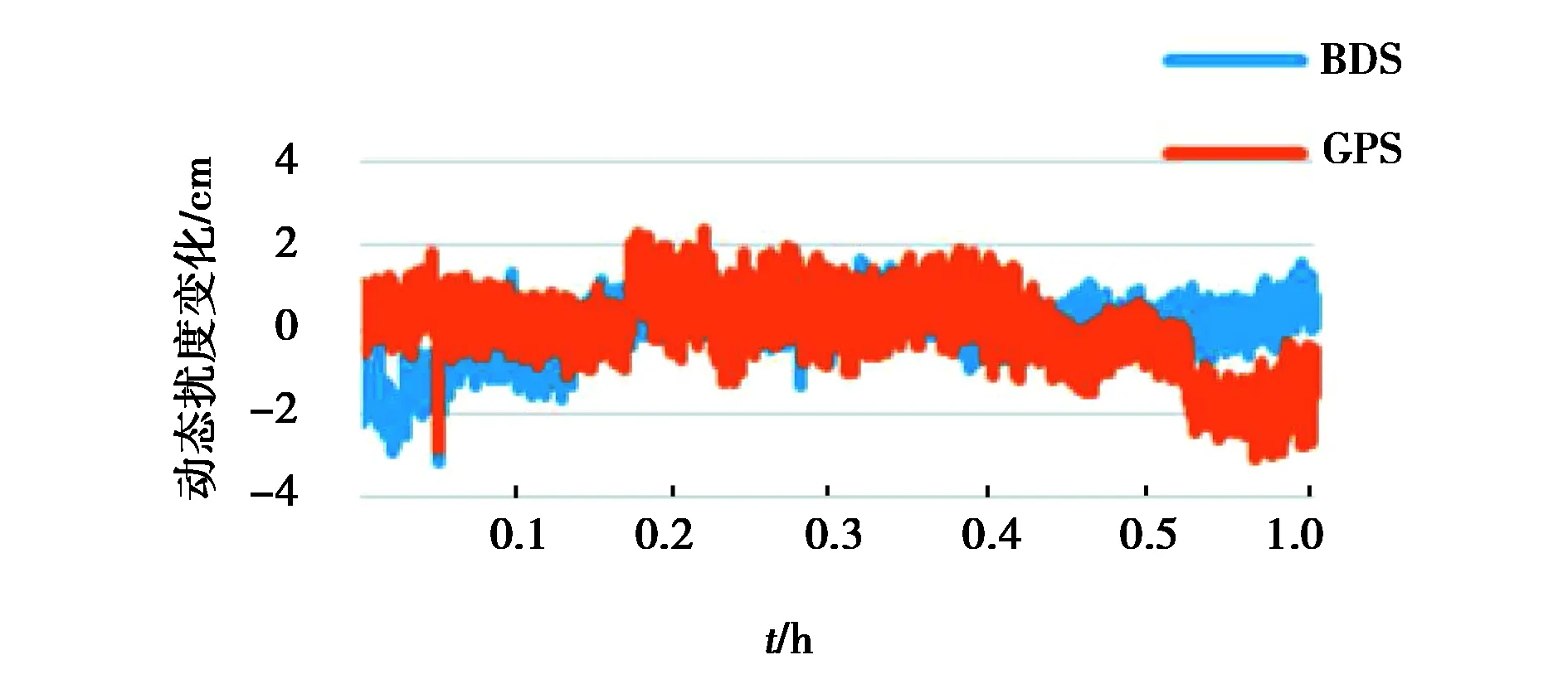
图2 JCD1 BDS动态PPP与GPS动态PPP解算结果对比图
如图2所示,JCD1布设在桥梁的一端,桥梁的端侧相比于桥梁中间结构较稳定,动态扰度变化趋势较小,在监测5 min左右出现3 cm较大动态扰度变化,根据记录人员的记录,此刻有重型卡车通过,北斗和GPS都监测出了此时的位移变化,并且在整个监测过程中,BDS动态PPP的监测变形过程与GPS动态PPP监测变形过程一致.如图3所示,JCD2布设在桥梁中间,动态扰度变形相比于图2要大,监测50分到1小时之间的10 min,根据记录人员的记录,这段时间桥上发生了拥堵,但是桥梁的端侧没有拥堵,所以JCD2此时动态扰度变形大而且频繁,图2此刻没有发生太大变形,BDS动态PPP和GPS动态PPP都监测出了整个监测过程桥梁动态扰度变形情况,并且监测变形过程一致.
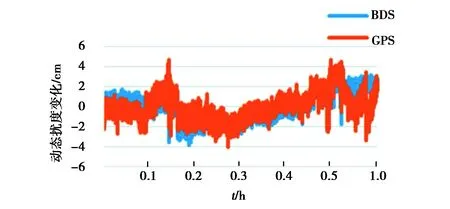
图3 JCD2 BDS动态PPP与GPS动态PPP解算结果对比图
综上所述,BDS动态PPP可以满足大型桥梁厘米级的动态变形监测,能监测出大型车辆经过桥梁时所造成的厘米级变形,对于毫米级高精度变形监测目前还不能满足.
3 结束语
本文利用实际工程采集的桥梁变形监测数据,分别从BDS静态PPP和动态PPP两方面分析了BDS的PPP在桥梁变形监测中的精度和前景问题,得出如下结论:
1)在观测条件较好,卫星数目较多的情况下,连续监测1 h BDS静态和动态PPP水平和竖直向精度可以达到厘米级,能满足厘米级变形监测精度,对于毫米级高精度变形监测还不能满足.
2)利用BDS动态PPP做桥梁动态扰度变形监测能达到和GPS做桥梁动态扰度变形监测一样的效果,BDS动态PPP监测变形过程与GPS监测变形过程一致,表明BDS动态PPP可以应用于大型桥梁的动态扰度变形监测.