基于BDS三频信噪比的多径误差检测技术研究
2019-05-07袁阳张云杨树瑚韩彦岭洪中华王静
袁阳,张云,杨树瑚,韩彦岭,洪中华,王静
(上海海洋大学 信息学院,上海 201306)
0 引 言
北斗卫星导航系统(BDS)近几年发展迅速,BDS-3卫星不断发射成功,其静态或动态定位精度都有了大幅度提高.通过建模、滤波和差分技术等方式可以有效消除与BDS定位相关的大部分误差.但由于多径干扰取决于接收器的位置,因此不可能通过使用差分技术来消除误差[1],所以对于BDS多径误差的处理并不理想.
针对如何检测与削弱卫星测量中的多径误差,国内外学者做了很多工作.Siereveld等[2]提出了多路径估计技术,通过接收信号自适应函数的斜率来预测反射信号相对于直射信号的相位差,从而减少多路径效应的误差.Comp 等[3]提出了基于接收信号信噪比的分析来削弱多路径效应误差的方法.Minami 等[4]设计了以最小二乘估计法为基础的自适应滤波法,有效地削弱了卫星测量中的多路径效应.Bilich等[5]通过对多路径误差和接收机跟踪误差进行隔离的方式来估计和削弱多路径误差.Grove等[6]通过根据载噪比(C/N0)对位置解中的全球卫星导航系统(GNSS)观测值进行加权,减轻非视距(NLOS)接收和多径干扰对位置精度的影响.Li-Ta Hsu等[7]在密集的城市环境中对矢量跟踪进行评估,以确定对多径干扰和非视距接收的影响.张波等[8]利用观测值的信噪比对观测值质量进行评价,通过降低受多路径效应影响的观测值的权重,从而达到削减多路径误差的目的.钟萍等[9]设计了一种将有效信号与多路径噪声相分离的方法,有效地削弱了 GPS 多路径效应引起的误差.谷守周等[10]提出了基于小波变换和傅里叶分析组合的多路径探测与缓解方法,综合利用傅里叶分析的时频变换特性和小波分析的频率分解性质,以GPS码减载波为基本处理数据,进行了码相位多路径信息的提取. 尹子明等[11]通过谱分析的方法对多路径时间序列进行了分析,研究多路径与信噪比之间的相关性.虽然这些方法能够使多径对定位结果的影响变小,但对于复杂环境的适应性效果不理想.而通过使用BDS的三个频率可以更可靠地检测到多径.
用户接收机在接收卫星直射信号时,同时也接收来自周围物体衍射或反射的信号.且随着反射信号相位滞后的变化,信噪比(SNR)也随着时间而振荡,且振荡的幅度取决于路径延迟以及直接和反射信号的幅度.所以多径效应是SNR可能偏离正常的许多原因之一.因此,Rudi等[12]通过实验测量的L1和L2频率之间,L1和L5之间的SNR数据差异,说明多径效应对GPS L1,L2和L5信号SNR的影响将具有不同的比例和速度.多路径干扰的相位在三个频率上比在两个频率上更不一致,通过使用三个频率可以实现更可靠的检测且适应复杂多变的观测环境.本文则通过比较BDS三个频率上的SNR的测量来检测多径干扰.通过将某颗卫星在多径环境下测得的频间SNR统计量数据与低多径环境下得到的检测阈值进行比较,可以检测出强多径.之后,对检测到多径的那些历元的该颗卫星予以剔除后进行定位,可以得到更好的定位结果.
1 利用SNR检测多径误差的原理和技术流程
1.1 多径误差检测技术原理


(1)


1.2 检测技术流程
检测技术流程如图1所示.
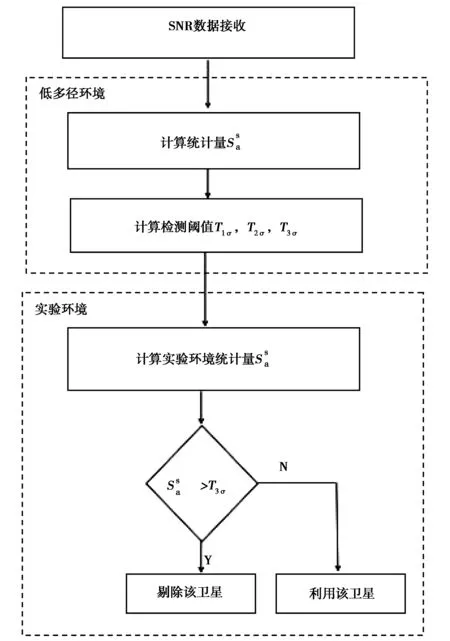
图1 检测技术流程

在进行定位结果分析时,首先使用实时动态(RTK)差分技术计算出实验地点的经纬度坐标(作为基准).然后,得到使用所有卫星的定位结果(原始定位结果).最后,在统计量大于检测阈值且PDOP增加量小于0.8的那些历元内,对该颗卫星予以剔除,得到定位结果.将原始定位结果、剔除卫星后的定位结果与差分定位坐标相减得到坐标差值,并根据坐标转换公式将坐标差值转化为距离差值(m),算出经纬度提高或降低的差值绝对值,确定最终结果是否得到提高.
2 实验过程
2.1 实验环境
实验使用和芯星通UR370接收机接收数据,使用Novatel GPS-703-GGG天线.如图2所示,把接收天线固定在上海海洋大学信息学院的楼顶,利用伪距多路径计算公式(公式5)计算出C13号卫星的伪距多径的RMS值约为50 cm,多径影响较小,把该环境作为低多径环境.将楼宇之间的地面作为实验环境,接收天线固定在上海海洋大学经管学院和爱恩学院之间的空地上,附近有建筑墙面以及花池等,如图3所示.实验时间是2018年7月14日,数据接收的时间间隔为1 s,卫星截止仰角为0°.本文以C13号BDS卫星的数据为例进行分析.

图2 楼顶低多径环境

图3 实验环境
2.2 实验数据处理
2.2.1 低多径环境的数据处理
根据接收机接收到的C13号卫星原始SNR数据,分别计算出ΔS12和ΔS13.进一步拟合成的多项式如下:
ΔS12(θas)= 7.731×10-5×(θas)3-
0.009831×(θas)2+0.2788×(θas)+
0.7992,
ΔS13(θas)= 7.193×10-5×(θas)3-
0.00944×(θas)2+0.2982×(θas)+
0.005251.
(2)
式中:θas是接收机到卫星的仰角.
拟合的多项式曲线情况如图4所示,横坐标是仰角,纵坐标是SNR差值,黑色曲线则是二者拟合的多项式曲线ΔS12和ΔS13.从图中可以看出,在仰角较高的情况,多径效应较小,同时SNR差较小,从一定程度上反映了多径效应可以导致SNR发生变化.
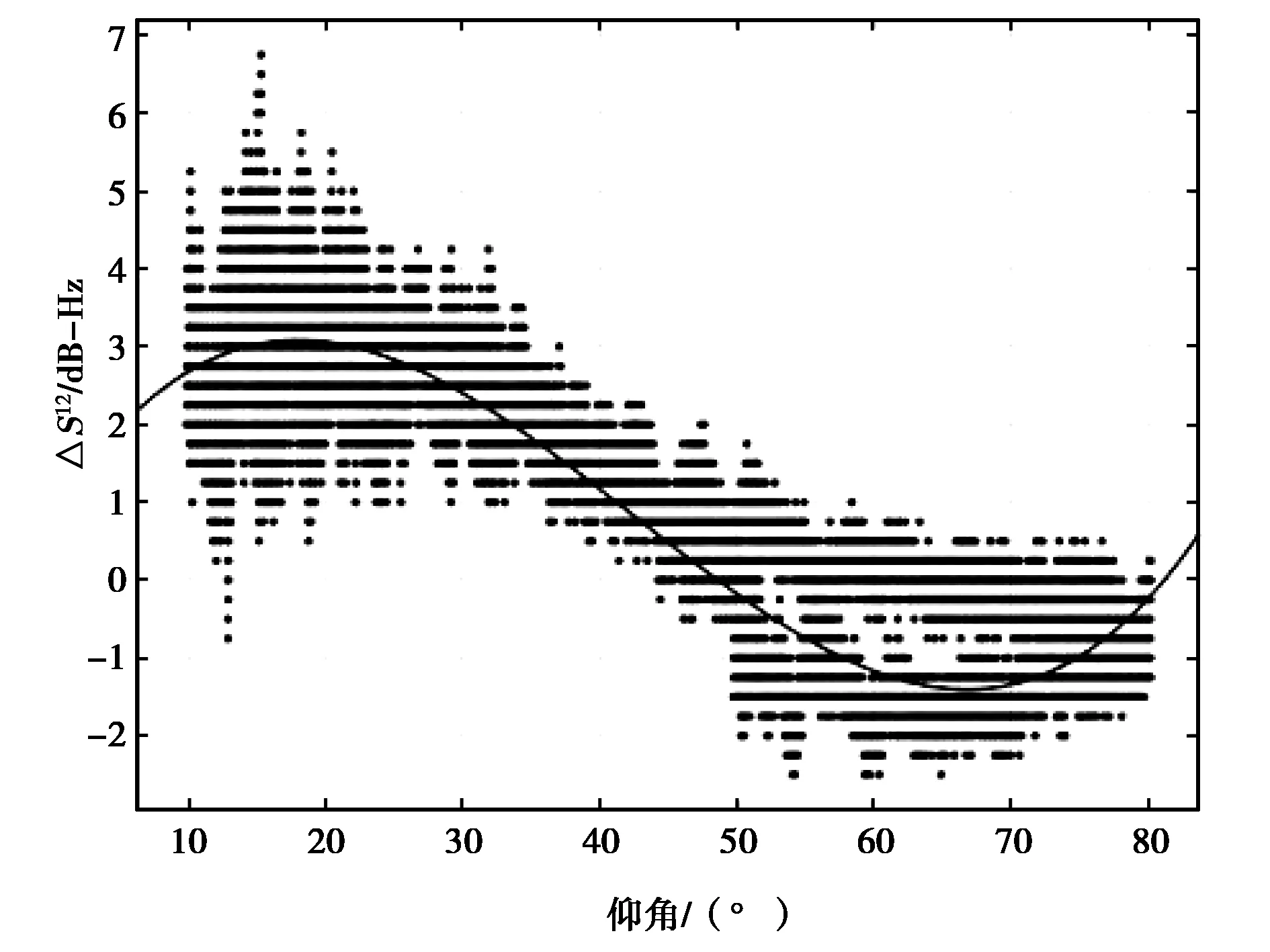
(a)ΔS12的拟合图
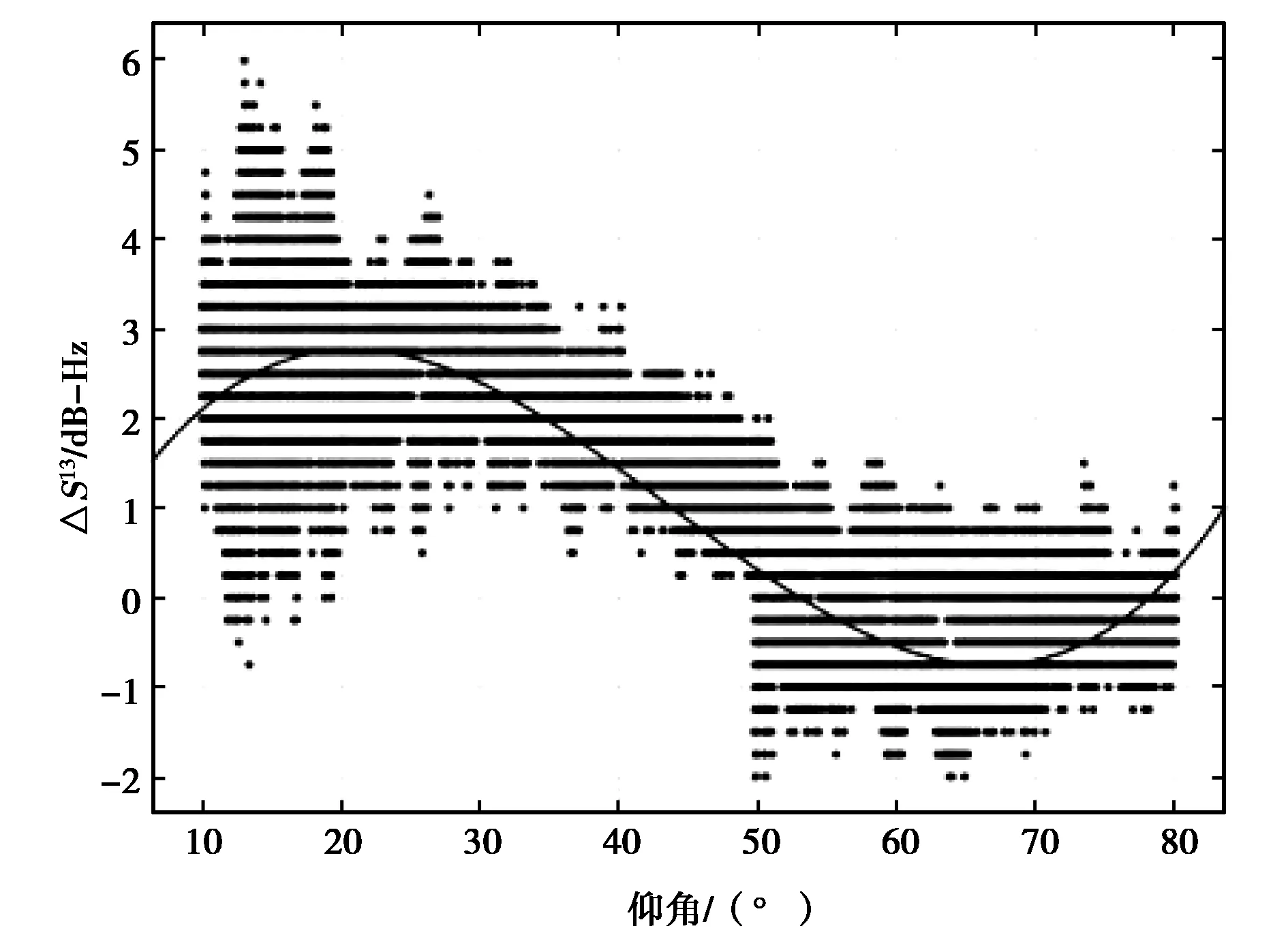
(b)ΔS13的拟合图图4 信噪比差值拟合
mean= 1.361×10-5×(θas)3-0.001873×
(θas)2+0.06285×(θas)+1.86.
(3)
通过上面各值,可以得到检测阈值T1σ为平均值加1倍标准偏差;T2σ为平均值加2倍标准偏差;T3σ为平均值加3倍标准偏差.相应的拟合多项式如下:
T1σ= 1.361×10-5×(θas)3-0.001873×
(θas)2+0.06285×(θas)+3.215;
T2σ= 1.361×10-5×(θas)3-0.001873×
(θas)2+0.06285×(θas)+4.57;
T3σ= 1.361×10-5×(θas)3-0.001873×
(θas)2+0.06285×(θas)+5.925.
(4)
2.2.2 实验环境数据分析
实验环境中,接收机能够接收到来自墙面反射的多路径延迟信号,以造成多路径干扰.在仰角比较小的时候,多径干扰较大,随着仰角的变大,多径干扰逐渐变小.根据公式(1)可以计算出实验环境下C13号卫星的统计量值及3个检测阈值T1σ,T2σ,T3σ(从下至上)如图5所示.
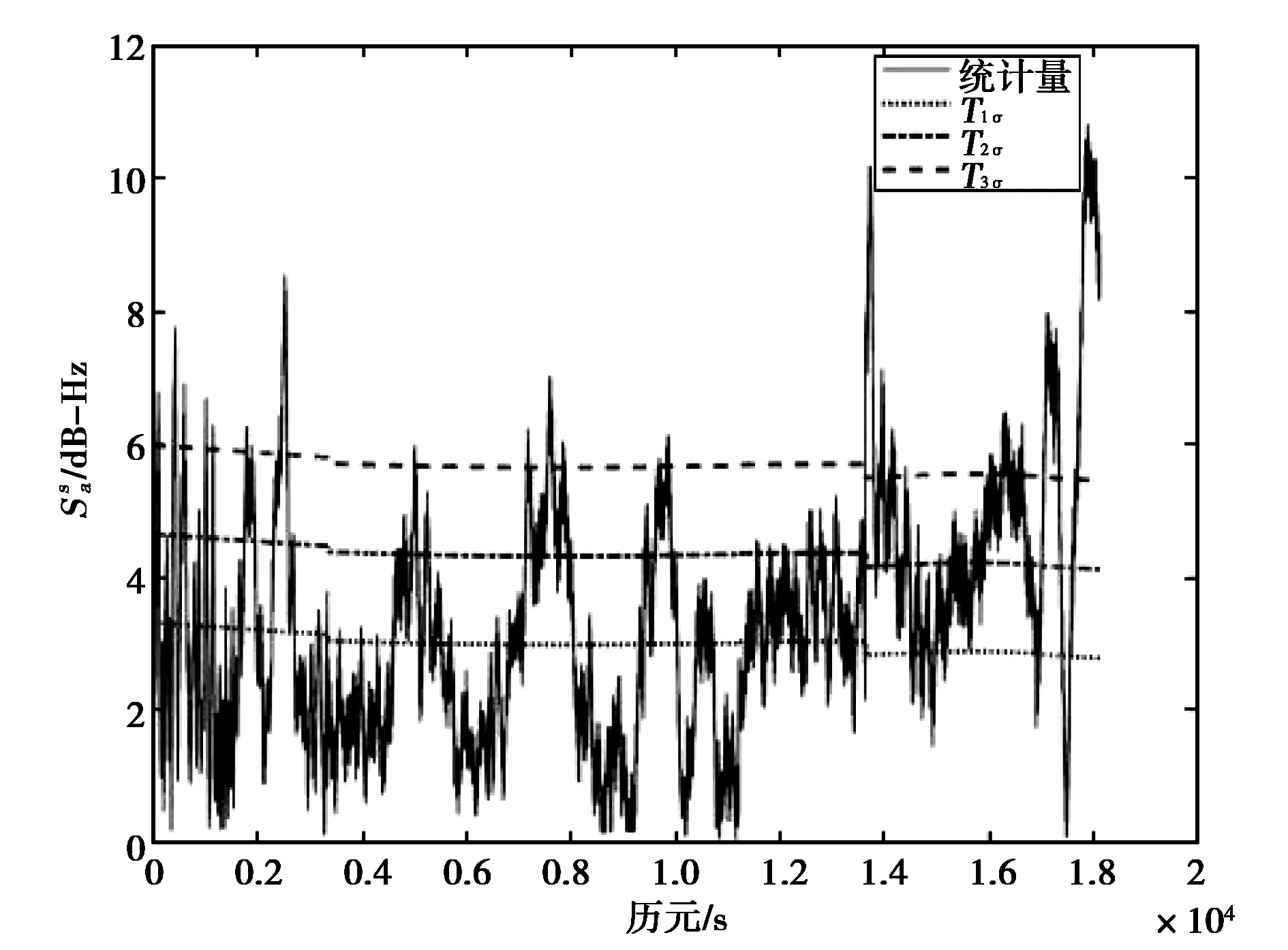
图5 实验环境统计量及检测阈值
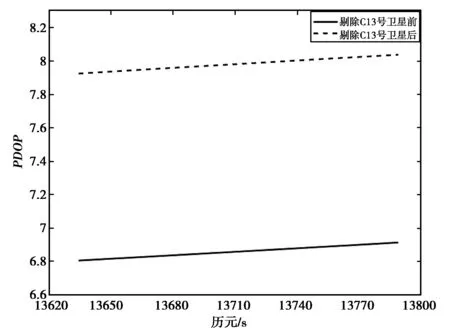
(a)13634~13789 s历元的PDOP变化
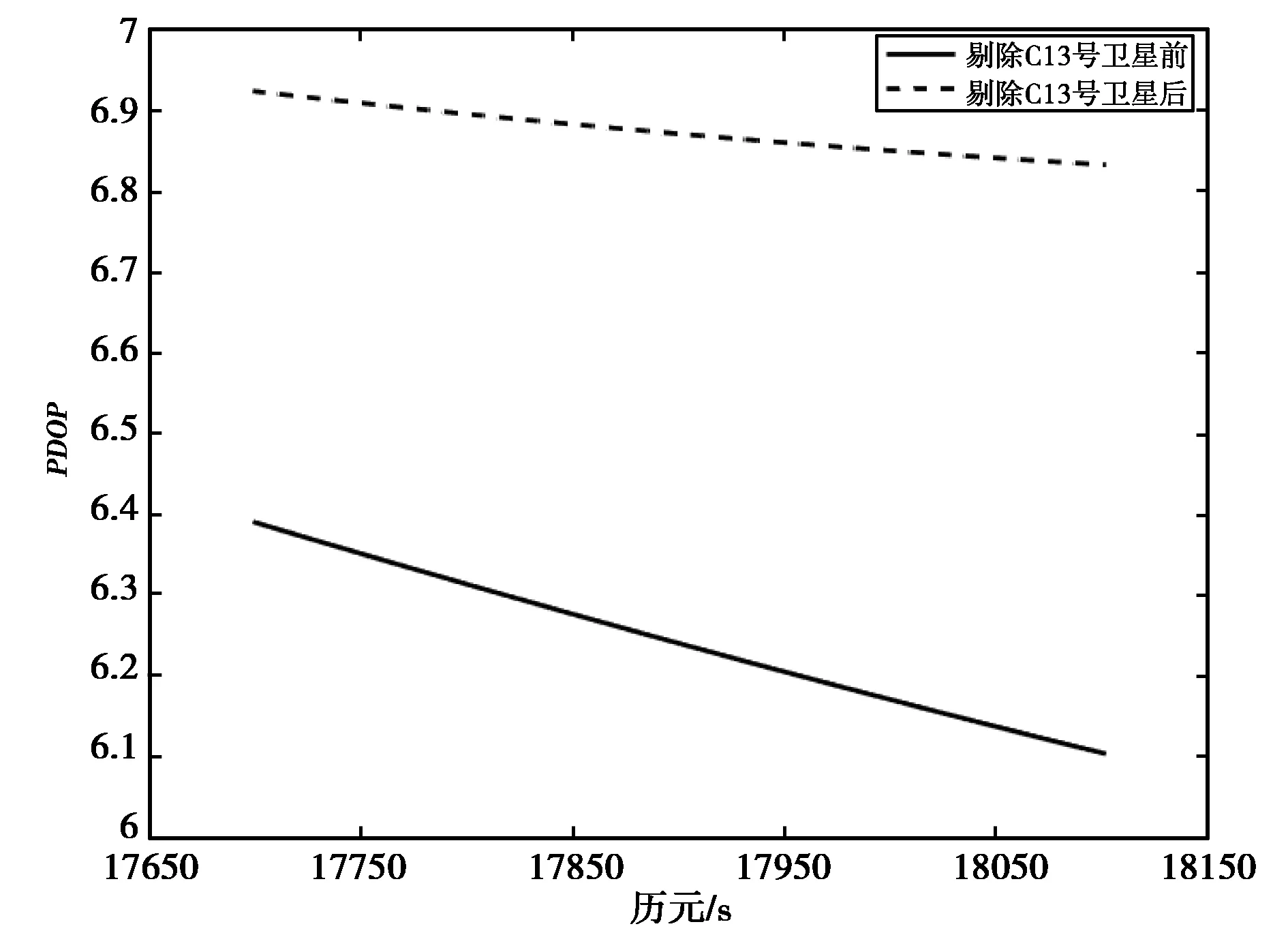
(b)17701~18121 s历元的PDOP变化图6 部分历元的剔除C13号卫星的前后PDOP值变化
图6中实线代表剔除C13号卫星前的PDOP值,虚线代表剔除C13号卫星后的PDOP值.由图6(a)可知,在13634~13789 s历元这段时间,剔除C13号卫星,PDOP值前后变化大于1;17701~18121 s历元,PDOP值的变化大于0.5.可见,剔除卫星之后将导致PDOP值发生较大变化.而当PDOP值变化较大时,会导致最终的定位结果变差.因此,将PDOP值也作为一个检测标准.PDOP的数值越大,定位结果越差,所以不能令PDOP增加过大.根据多次数据分析处理及经验值,将PDOP增加量小于0.8且统计量大于检测阈值历元的C13号卫星予以剔除.
3 结果分析
3.1 伪距多路径(MP)分析
MP反映了天线周围各种非直接信号的叠加影响,可以用伪距、载波相位和整周模糊度来表示[13],其公式为
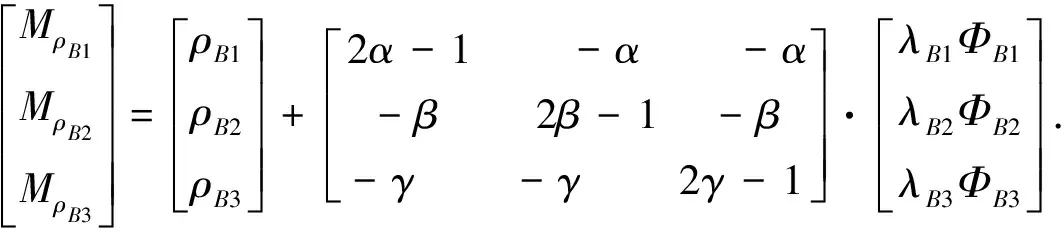
(5)
式中:MρB1,MρB2,MρB3分别表示B1,B2,B3频段上的MP误差;ρB1,ρB2,ρB3和ΦB1,ΦB2,ΦB3分别表示B1,B2,B3频段上的伪距和相位观测值.λB1,λB2,λB3分别表示载波B1,B2,B3上的波长.α,β,γ如下:
(6)
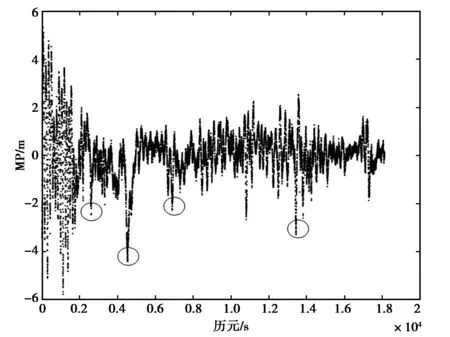
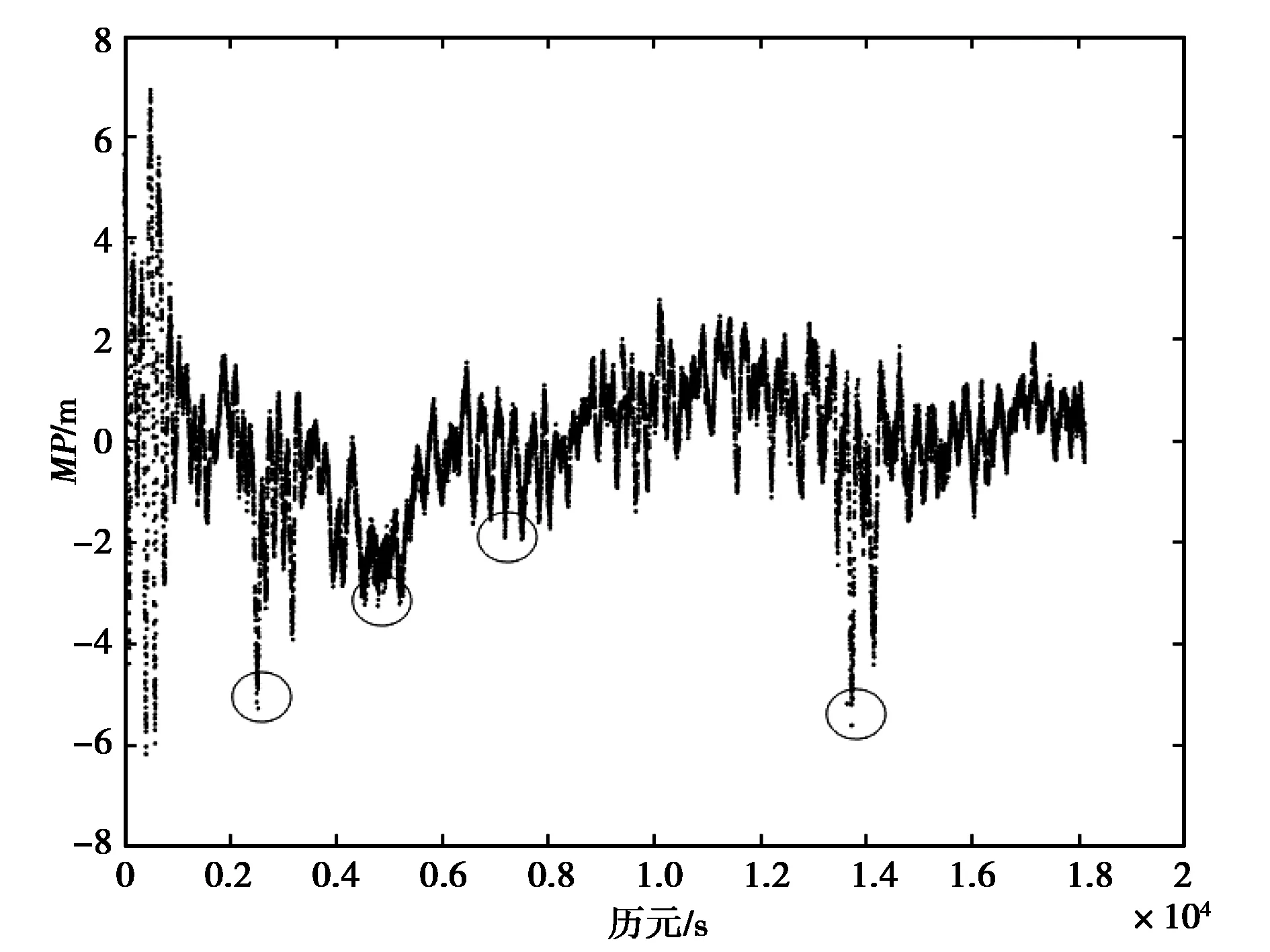
根据上述MP的方程,可以得到实验环境下的多径误差.如图7所示.
(a)B1
(b)B2

(c)B3图7 B1,B2,B3频段的伪距多径(MP)误差
比较图5和图7,可以发现:在前2000 s,图5中统计量波动非常大,同时图7的(a)、(b)、(c)中MP观测值也都出现大幅振荡;在2000~14000s之间,可以看到图5统计量值基本低于检测阈值(2300 s、4400 s、7800 s、13700 s处的几个峰值除外),而图7(a)、(b)、(c)中圈出的对应图5中统计量的几个峰值除外,多路径观测值在0左右有轻微波动;在16000 s之后,可以看到图5中统计量值有3个地方的峰值高于检测阈值,相应的,图7对应的历元多路径观测值也是峰值的状态.结果说明统计量的大多数峰值与MP观测值的巨大变化之间存在强相关性.该结果表明,所提出的基于SNR的多径检测技术在检测多路径干扰方面的有效性.
3.2 单点定位结果分析
首先使用RTK载波相位差分技术求解实验位置的经纬度.在已知低多径环境坐标的情况下,使用低多径环境与实验环境同时接收的卫星数据及RTK技术易得到实验地点坐标.然后,根据1.2小节的新方法,对统计量高于检测阈值且PDOP增加值小于0.8的那些历元的C13号卫星予以剔除,可以得到剔除C13号卫星后的定位结果.
通过比较原始定位结果(使用C13号卫星进行定位)和剔除C13号卫星(不使用C13号卫星进行定位)后的定位结果与差分结果的差值来判断定位结果的好与坏,差值较小说明定位结果更好.下面以第430 s这一历元的定位结果进行分析,其结果如表1所示.

表1 第430 s(历元)的定位结果分析
从表中可以看出,在第430 s这一历元,检测阈值高于统计量且PDOP增加0.02(小于0.8),符合剔除标准,所以在这一历元剔除C13号卫星.剔除C13号卫星以后卫星数从7颗降到6颗,满足基本的定位卫星数量.以差分结果作为基准,剔除卫星之后的定位结果比原始定位结果更加接近差分定位结果.如表1第二列和第三列所示,将经纬度坐标差转化为以m为单位的距离差后,在纬度方向定位结果从距离差分定位结果差-5.561 m,提高到-4.564 m,提高了约1 m,经度方向从-2.843 m提高到-1.714 m,提高了约1.1 m,大大提高了单点定位的定位精度.在本次实验中,符合统计量高于检测阈值且PDOP变化小于0.8这两个条件的历元一共有1011个,其经纬度提高的平均值如表2所示,从表中可以看出纬度方向定位结果平均提高了0.814 m,经度方向定位结果平均提高了0.9 m.从这个结果可知,新方法对于多径误差的检测具有较高的准确性,且在检测到多径误差后,不使用C13号卫星进行定位,可以使定位结果提高分米级的定位精度.总体而言,新方法能够有效检测BDS卫星的多径误差.

表2 1011个历元的经纬度方向提高平均值
4 结束语
本文提出的检测BDS卫星多径技术的原理是多径干扰对同一颗卫星的不同频段的SNR的影响存在差异.而使用BDS的三个频率的SNR可以实现更好的检测,具有更高的可靠性及复杂环境的适应性.本文根据经验值,使用检测阈值T3σ以及PDOP值增加小于0.8的历元,认为在这些历元内存在强多径,导致定位结果变差.
在剔除满足剔除标准的C13号卫星后,从MP结果分析与单点定位结果分析,说明该技术对于BDS卫星多径误差检测的具有较高的有效性和准确性.同时从单点定位结果可知,使用该方法可以令经纬度方向的定位结果提高近1 m,大大提高了单点定位的定位精度.
该技术是在数据后处理的基础上提出的,且可知使用该技术可以提高定位精度.然而,在实际生活中通常需要实时定位精度的提高,该技术为提高实时定位精度提供了一种可能.所以,如何将该技术应用到实时定位方面的多径误差检测以及消除是以后亟待讨论解决的重要问题.