城轨牵引供电系统车-地配合参数优化方法
2019-05-05刘志刚郝峰杰
刘志刚,郝峰杰,陈 杰,张 钢
(北京交通大学 电气工程学院,北京 100044)
目前城市轨道交通车辆普遍采用再生制动,一方面可以节约能源,另一方面可以减少闸瓦制动造成的环境污染.由于现有的供电系统采用二极管整流供电,当再生制动能量不能被相邻列车完全吸收时,网压抬升过高导致再生制动失效.为了回收利用制动能量,目前主要的解决方案有两种:储能型装置和逆变回馈型装置[1].储能型装置存在价格高、容量小等缺点,逆变回馈型装置兼具牵引供电、能量回馈和无功补偿功能,更多的在地铁线路中得到推广应用[2].逆变回馈型装置(中压能馈装置)的核心是三相电压型逆变器,在牵引供电系统中与二极管整流器并联,列车制动时把直流侧多余能量反馈给中压交流电网进行再利用,据统计节能率可达10%以上[3].中压能馈装置普遍采用传统的恒压控制,这种方式有利于稳定直流电压,但是不利于再生制动能量在多个牵引变电所之间的分配,会造成牵引供电系统向110 kV电网反送电的情况.下垂控制广泛应用于直流微网,通过虚拟电阻随负荷电流变化线性调节直流参考电压,实现多个变换器之间的功率分配[4],可以在牵引供电系统中借鉴.为了进一步提升节能率,需要对牵引供电系统车-地配合参数进行优化,特别是中压能馈装置逆变启动电压和下垂系数的设置,会影响牵引网的潮流分布,进而影响到列车再生制动能力的发挥和系统能耗的大小,传统的参数设置多依靠经验,缺乏科学理论依据.
针对牵引供电系统的潮流计算,文献[5]对牵引变电所二极管整流器进行了详细建模,提出了一种包含交流网络的直流潮流算法;文献[6]考虑换流器之间的联系以及再生制动工况,计算各牵引变电所的有功功率输出,并将交流潮流计算嵌入直流潮流中;文献[7]针对每个节点用一组电流平衡方程替代传统的功率平衡方程,显著减少计算时间和多列车模拟的复杂性;文献[8]提出了一种基于灵敏度的方法来计算考虑牵引网过电压限制的列车再生制动功率;文献[9]通过基于图论的潮流方程矩阵表达形式,简化了统一潮流计算并允许在不改变系统拓扑的情况下对列车运动进行建模.上述文献没有考虑逆变回馈装置的建模及参数优化,而对于电压型逆变器的潮流建模及控制参数优化在柔性直流输电领域有着广泛的研究[10-11].文献[12]推导了电压型变换器的稳态潮流通用模型和交直流迭代潮流算法;文献[13]提出了一种应用于多端直流电网的直流电压控制策略和基于梯度的最优潮流算法;文献[14]针对直流电网中的最优潮流问题,提出了一种基于模糊控制理论的自适应粒子群算法,实现电网兼顾有功网损和电压质量的优化运行.然而,牵引供电系统的负荷特点与柔性直流输电系统存在较大区别,列车负荷位置和功率存在时变性,还需要考虑直流电压对列车再生制动的约束条件.目前的文献较少对包含中压能馈装置的城轨牵引供电系统车-地配合参数的优化进行深入研究.
本文作者提出将电压下垂控制应用于牵引供电系统,建立了包含中压能馈装置的牵引供电系统等效电路模型,推导了采用电压下垂控制方式的直流潮流计算方法,并考虑了中压能馈装置的容量配制对潮流算法的影响.考虑直流电压对再生制动的约束,提出基于遗传算法的牵引供电系统车-地配合参数优化方法,实现列车再生制动能力最大发挥和系统能耗最小,为车-地配合参数优化提供了参考依据.
1 系统建模
典型牵引供电系统结构见图 1.主变电所将电力系统交流110 kV电压经变压器变为交流35 kV电压,牵引变电所将交流35 kV电压经过降压和整流变换到直流1 500 V或750 V电压为列车供电,中压能馈装置与二极管整流器并联,列车制动时把再生制动能量回馈到35 kV电网. 对于二极管整流器建模,输出特性采用分段线性化处理,等效模型为理想电压源与内阻及二极管串联[2].对于列车的建模,分为电流源和功率源两种模型[6],由于列车自身功率由牵引制动曲线决定,而牵引网网压受列车位置及列车工况影响而变化,因此把列车等效为功率源.
中压能馈装置的核心为三相电压型逆变器,如图2所示,L为交流滤波电感,C为直流电容,udc为直流电压,idc为负荷电流,ea、eb、ec为三相交流网压.
三相电压型逆变器在dq坐标系下的数学模型为[15]
(1)
式中:ω为电网电压角频率;ed、eq为交流网压的d轴、q轴分量;ud、uq分别为变流器交流电压的d轴、q轴分量;id、iq分别为交流电流的d轴、q轴分量.
三相电压型逆变器采用双闭环前馈解耦控制,电压外环作用是控制三相变流器直流电压,电流内环的作用是按电压外环输出的电流指令控制电流.
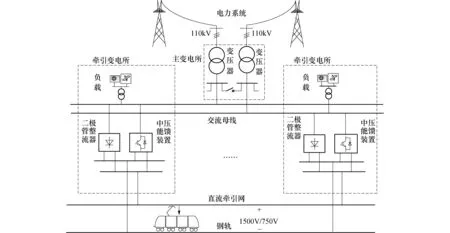
图1 牵引供电系统示意图Fig.1 Traction power supply system diagram
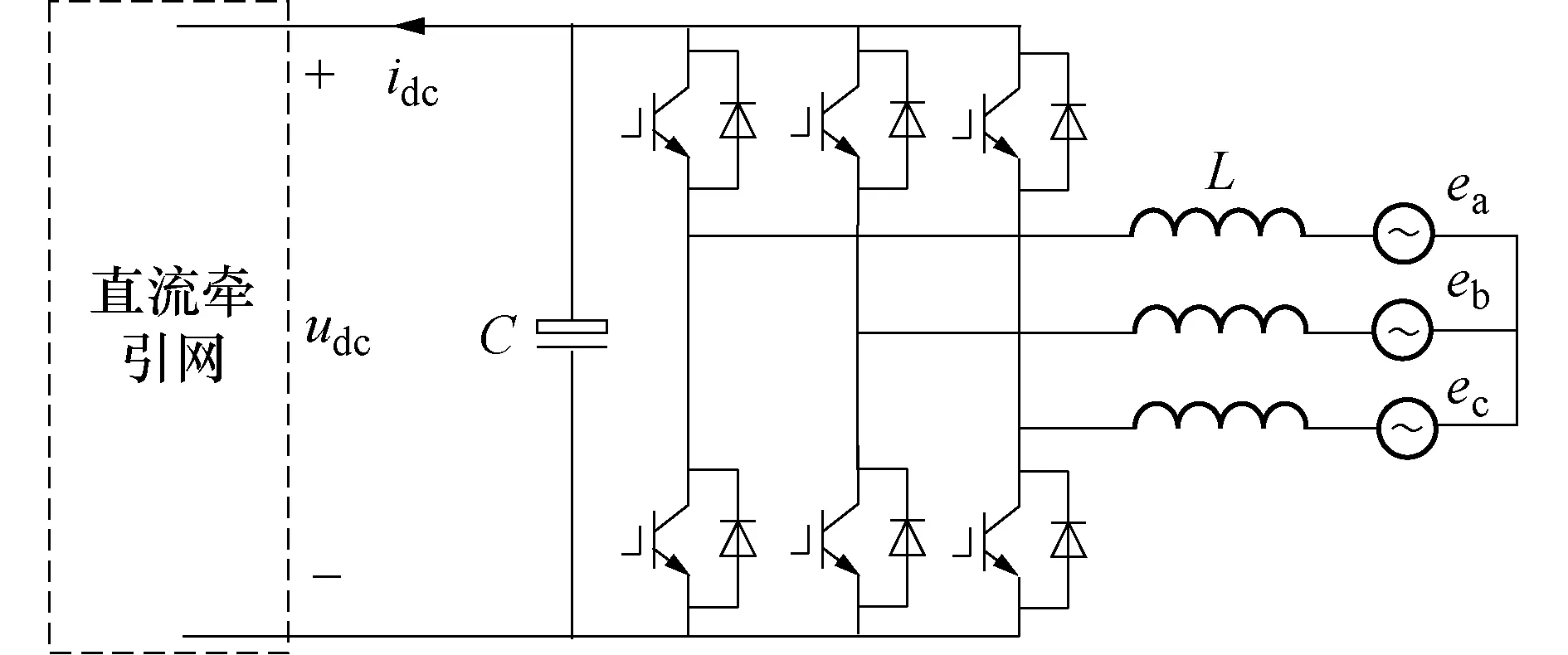
图2 三相电压型逆变器Fig.2 Three phase voltage source inverter
电流环数学模型为
(2)
式中:id′、iq′分别为id、iq电流指令;Gi(s)为电流调节器传递函数.
电压环数学模型为
(3)
式中:udc′为直流电压指令;U0为逆变启动电压;r为下垂系数,当r=0时,电压环为恒压控制模式,当r>0时,电压环为下垂控制模式;Gv(s)为电压调节器传递函数.
对式(2)~(3),采用扰动法[16],把状态变量表示成稳态量和扰动之和,得到小信号模型
(4)
式中:Δid、Δiq、Δudc、Δidc、Δudc′、Δid′、Δiq′分别为id、iq、udc、idc、udc′、id′、iq′的扰动量.
对于三相电压型逆变器直流侧存在关系式
(5)
对应的小信号模型为
(6)
式中:Ed、Eq、Id、Iq、Udc、Idc分别为ed、eq、id、iq、udc、idc的稳态值;Δed、Δeq分别为ed、eq稳态工作点的扰动量.
当采用电压定向矢量控制[17],Eq=0,单位功率因数运行时,Iq=0,根据叠加原理得
(7)
(8)
忽略网压扰动影响,可得直流等效阻抗模型为[18]:
(9)
式中:Gc(s)为电流闭环传递函数.
在低频段,Gv(s)Gc(s)G1(s)>>1,忽略负荷电流干扰,稳态情况下直流等效阻抗近似为
(10)
建立直流牵引供电系统等效模型如图3所示,Udo为二极管整流机组的理想空载直流电压,rd为二极管等效内阻,U0和r分别为牵引所中压能馈装置的空载电压(逆变启动电压)和等效直流阻抗,Ui为节点i电压,Rij为节点i和j之间的线路电阻.
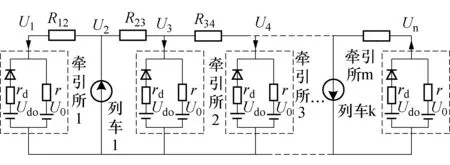
图3 直流牵引供电系统等效模型Fig.3 DC traction power supply system equivalent model
2 车-地配合参数优化
2.1 传统直流潮流算法
对于一个含有n个节点的直流电网,节点电压向量为U=[U1,U2, …,Un]T,电流向量为I=[I1,I2, …,In]T,节点导纳G=I/U.其中
(11)
直流网的潮流分布由牵引所节点电压和线路阻抗决定.以注入节点的功率方向为正,则节点i的注入电流和有功功率以及功率偏差分别表示为[19]
(12)
(13)
(14)
式中:Ui为节点i电压;Ii为支路i电流;Gij为节点导纳矩阵中第i行第j列元素;Pdi为电源注入节点i的有功功率;Pti为节点i的负荷功率.
含节点直流电压的修正方程为
(15)
采用牛顿拉夫逊法对修正方程进行求解,对应的雅可比矩阵可以表示为J,满足关系式:
(16)
(17)
(18)
2.2 电压下垂控制的直流潮流算法
对于直流输出特性,采用式(3)所示的电压-电流下垂控制的牵引所节点,中压能馈装置注入节点i的有功功率和有功偏差分别表示为
(19)
(20)
对应的雅可比矩阵元素为
(21)
直流潮流计算步骤为:
1)输入牵引供电系统数据,包括牵引所数量、列车数量、支路数量、节点编号、节点类型、线路参数、牵引所直流电压控制参数、列车负荷数据等.
2)形成节点导纳矩阵.
3)给定各节点电压初始值.
4)置迭代次数k=0.
5)按式(14)计算各节点功率误差ΔP.
6)判断功率误差是否小于容许值ε,若满足跳转到10)步,否则进行下一步.
7)按式(17)、(21)计算列车节点和牵引所节点的雅可比矩阵.
8)解修正方程式(15),得到ΔU,根据式(18)计算节点电压U.
9)置k=k+1,返回5).
10)计算支路电流.
11)判断牵引所电流是否大于中压能馈装置限功电流值,若牵引所功率大于限功值,牵引所转变为功率节点,Pdi取中压能馈装置恒功率控制指令值,按(14)式计算功率误差,式中Pti取0,按式(17)修正雅可比矩阵.否则,输出结果.
2.3 车-地配合参数优化方法
提出一种牵引供电系统分层控制结构,如图 4所示,第一层为底层控制,包括电压控制和电流控制;第二层为优化层,包括车-地配合参数优化算法.由第二层控制中车-地配合优化算法可以得到各个牵引所直流电压控制指令的最优参数,作为直流电压指令发送给第一层控制中的电压环,实现系统能耗最小且再生制动能力最大发挥的车-地配合控制.
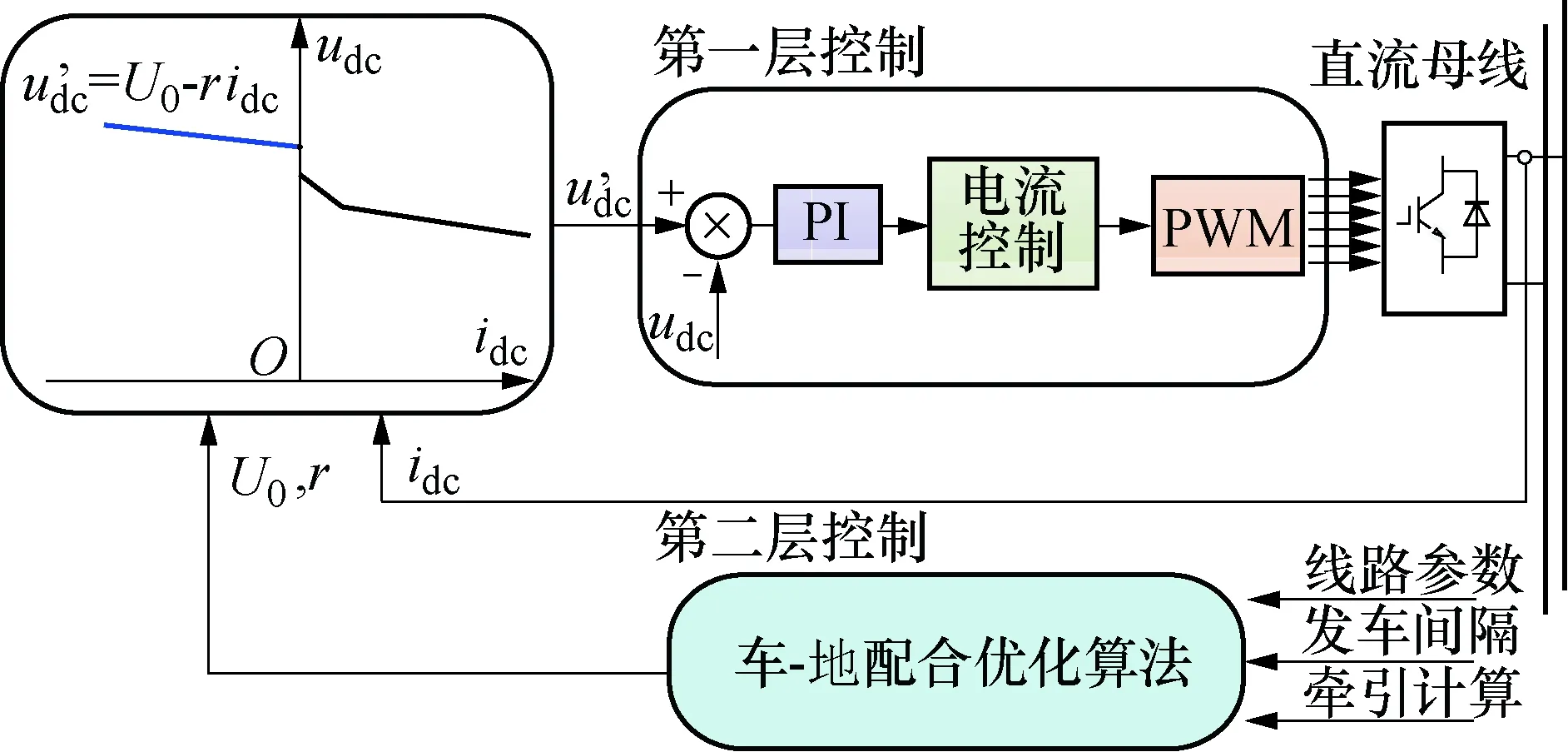
图4 分层控制结构Fig.4 Hierarchical control structure
1)优化目标.
以系统能耗最小为优化目标,其目标函数为

(22)
式中:Es为T时间内系统能耗;P(t)为t时刻主变电所正有功功率;T为发车间隔时间.
2)约束条件.
①等式约束.
直流牵引网的潮流约束条件为
Pdi(t)-Pti(t)-
(23)
式中:Pdi(t)为t时刻电源注入节点i的有功功率;Pti(t)为t时刻节点i的负荷功率.
②不等式约束.
为了使再生制动得到充分发挥,根据再生制动与直流电压配合关系,列车节点电压需满足条件
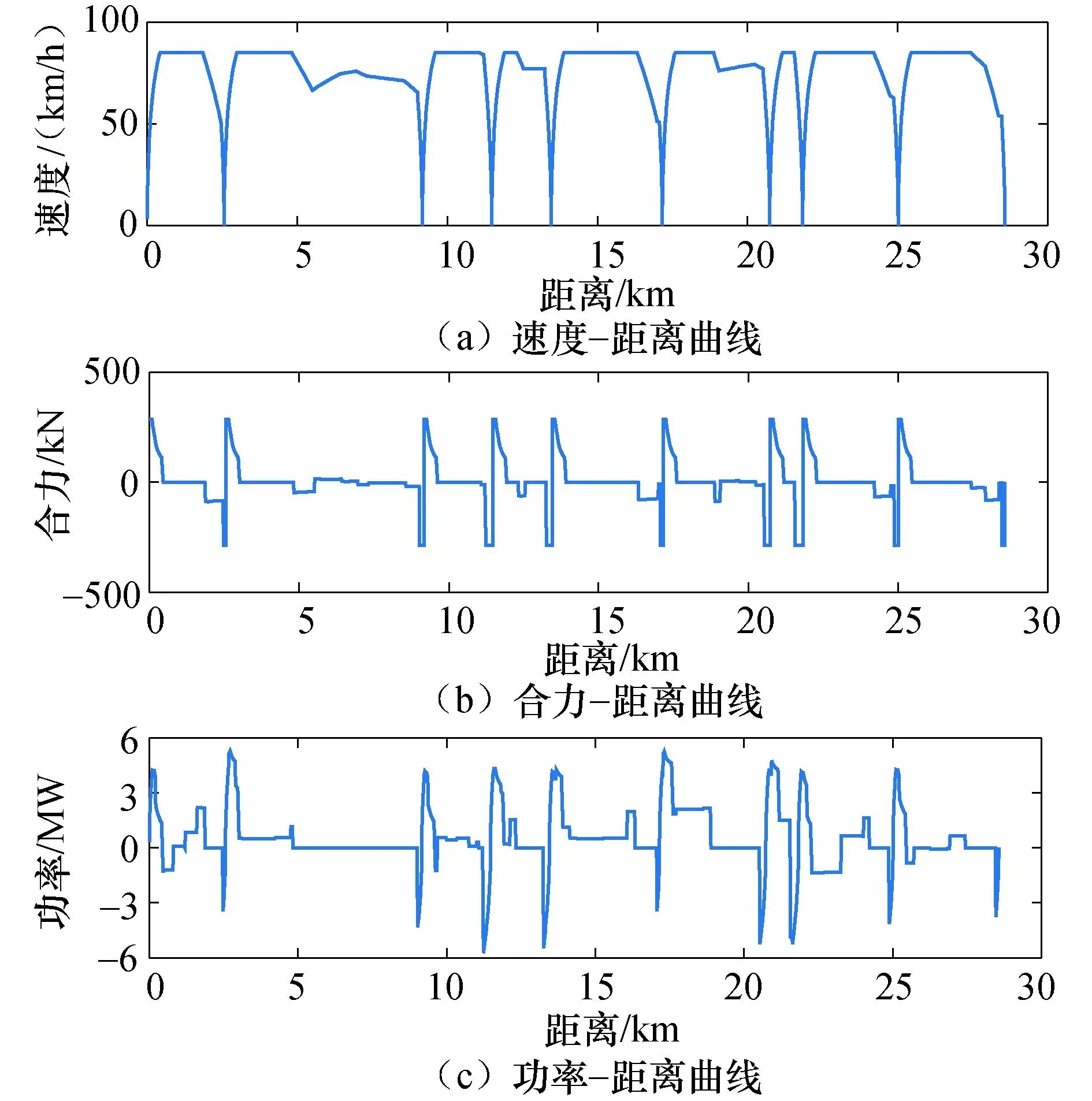
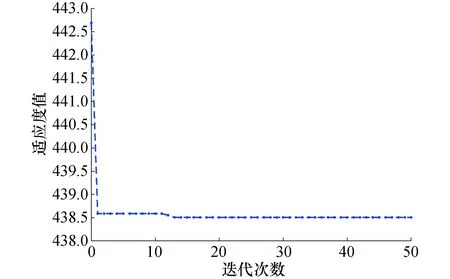
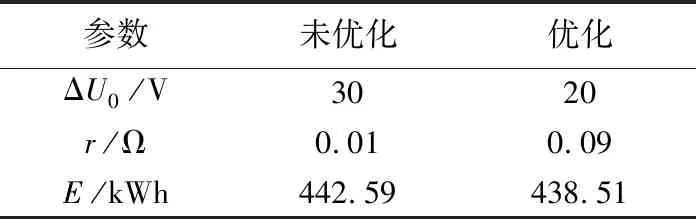
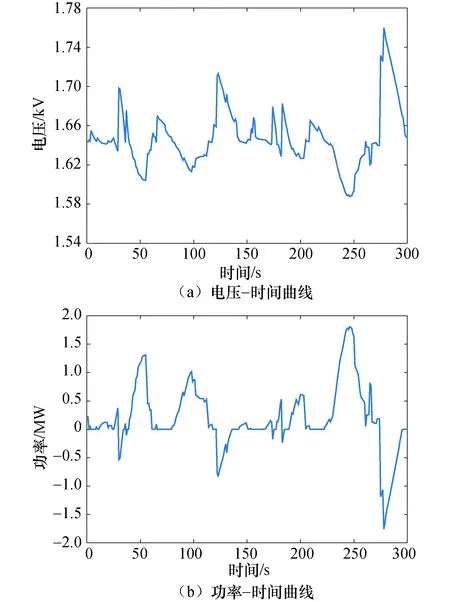
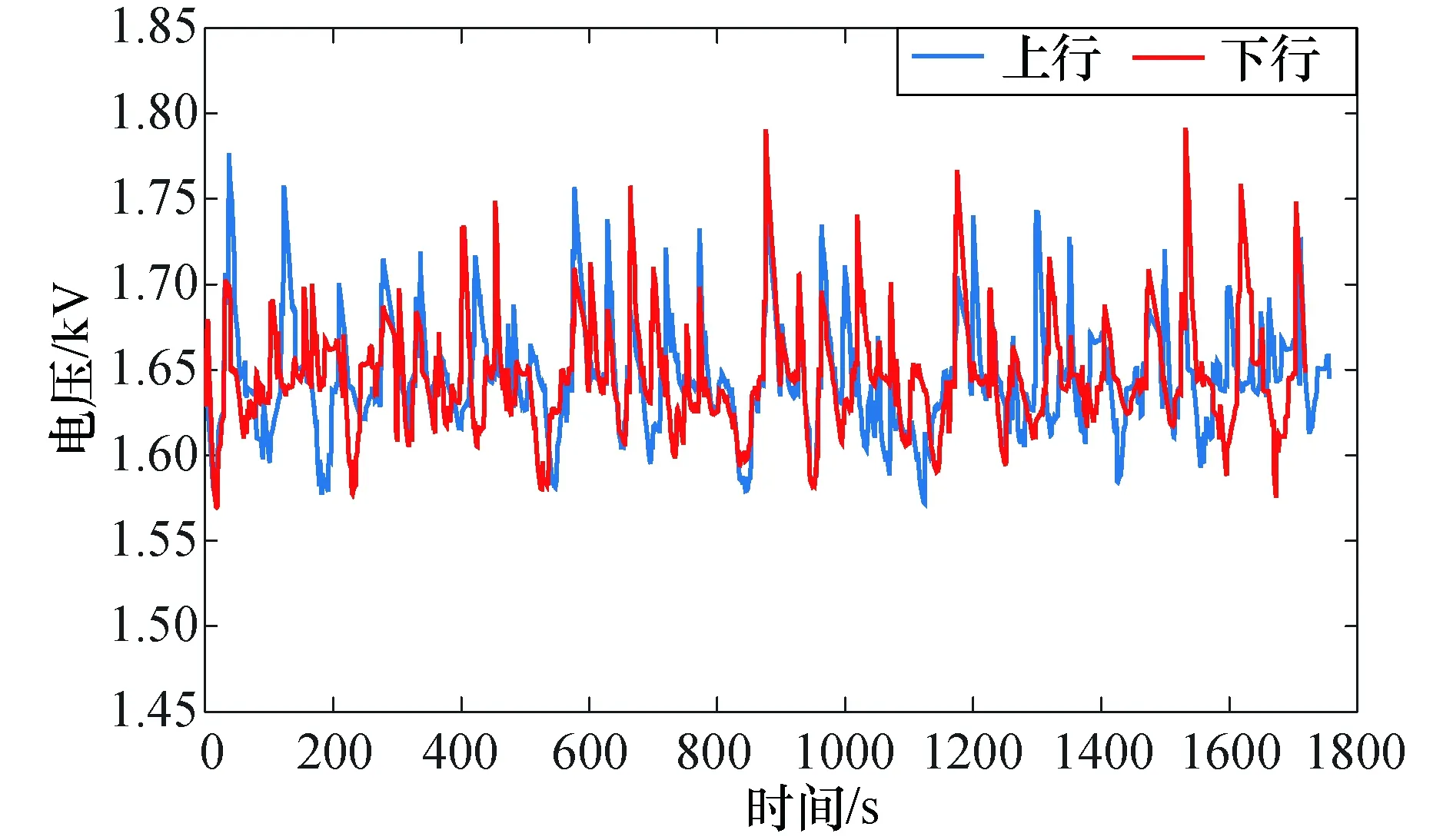
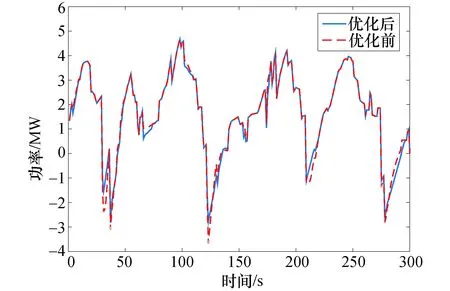
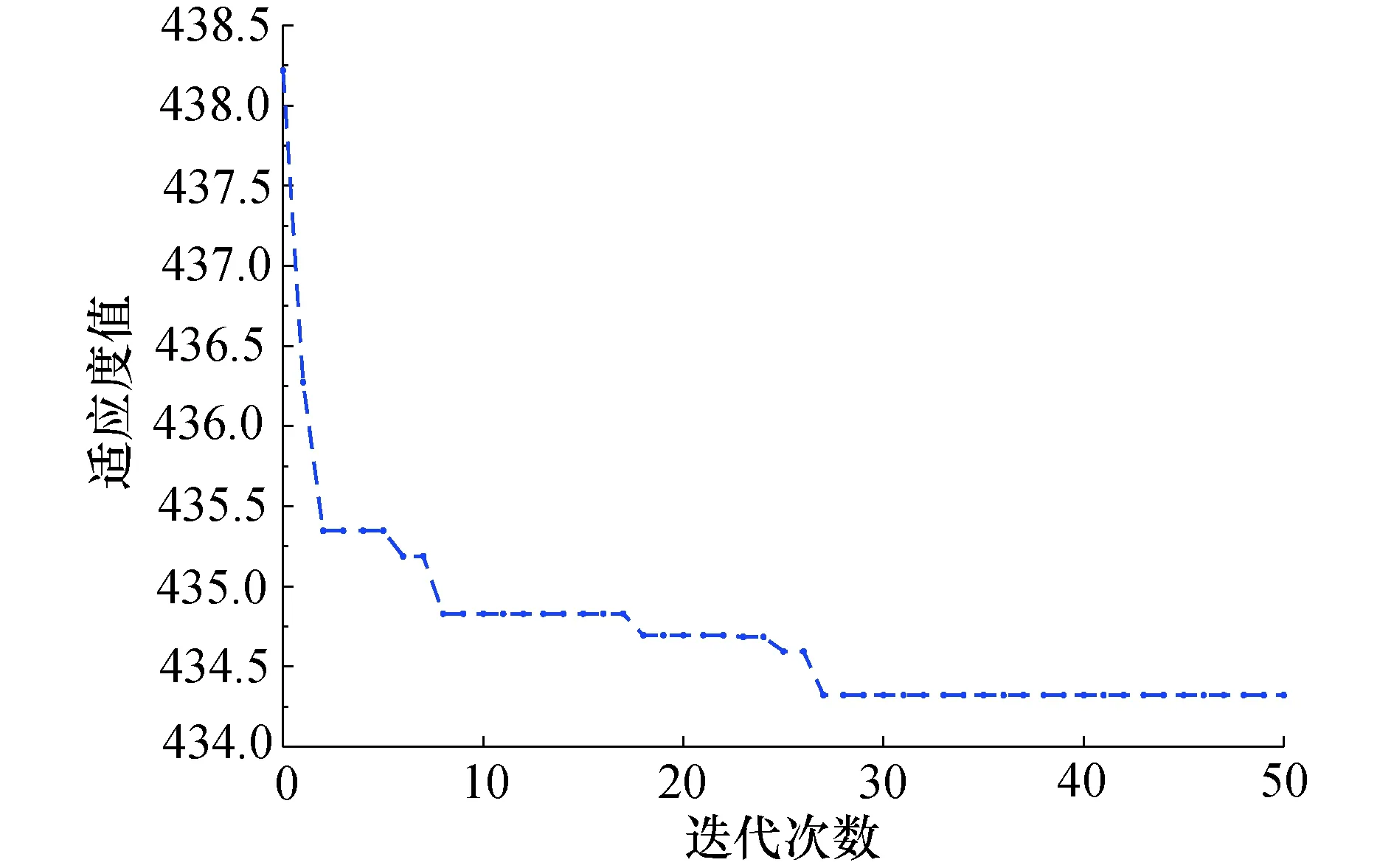
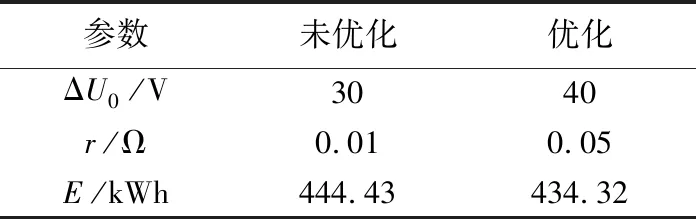
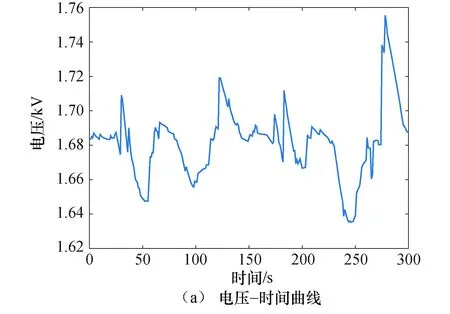
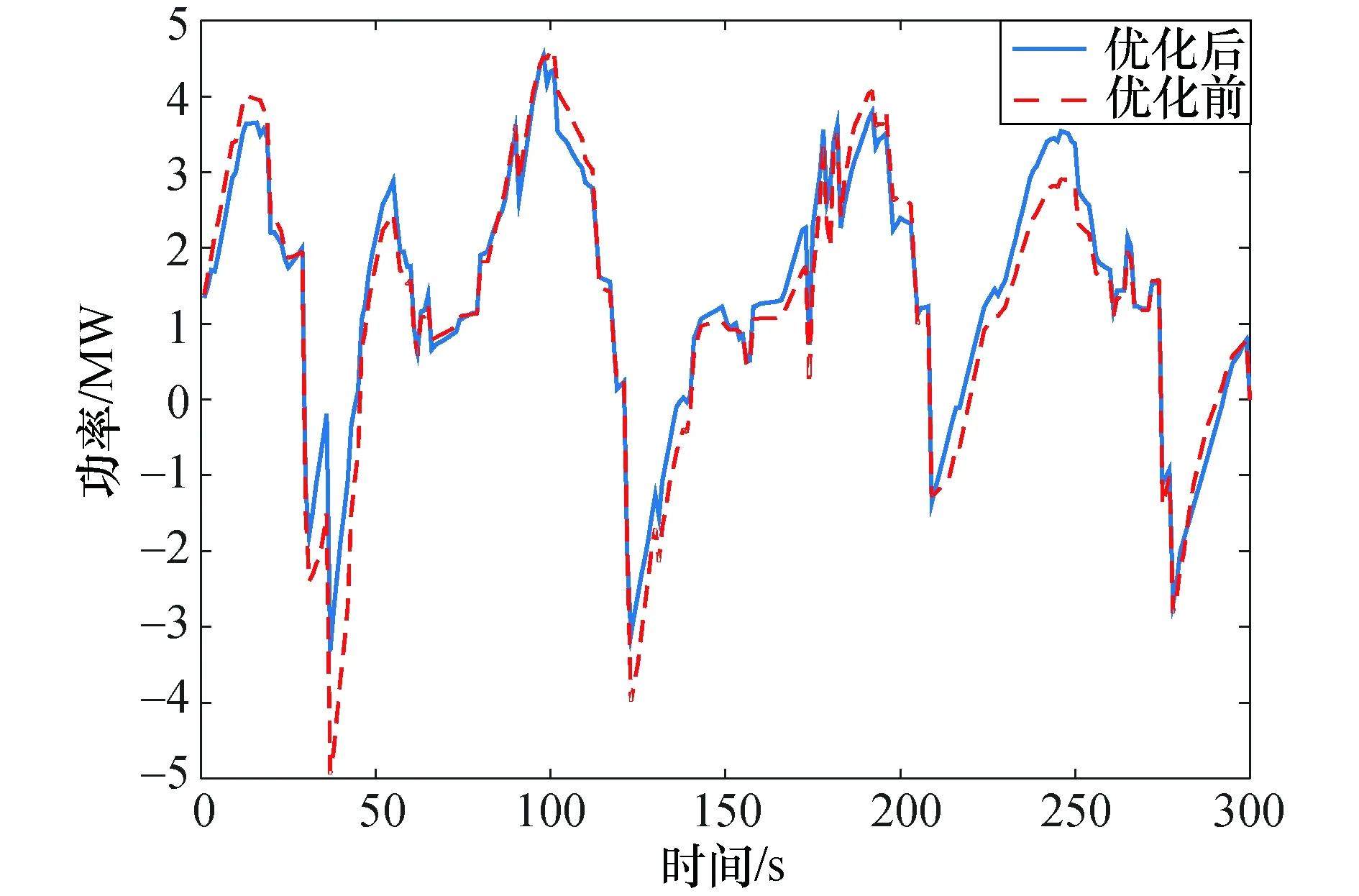
Umin (24) 式中:Umin为二极管空载电压;Umax为列车再生制动失效的临界电压值. 3)优化算法. 采用遗传算法[20]实现车-地配合参数的优化. 以某条地铁线路为例,建立系统仿真模型仿真参数见表 1. 表1 系统仿真参数 全线共有11座牵引变电所,位置分布见表 2.牵引网采用直流1 500 V架空接触网供电受电方式.交流电网采用集中供电方式,从外部电网的主变电站引入两路独立可靠的110 kV电源,中压交流电网采用35 kV,向车站、车辆段的牵引降压混合变电所、降压变电所供电.列车采用B型车4辆编组,牵引计算曲线如图 5所示.为了充分发挥再生制动功能,限制列车最大电压1 800 V. 表2 牵引变电所分布 图5 牵引计算曲线Fig.5 Traction calculation curve 发车间隔300 s,进化代数50,种群规模100,交叉概率0.4,变异概率0.001,中压能馈装置只有逆变回馈功能. 图6给出优化结果,系统能耗最小为438.51 kWh. 表3为优化前后300 s时间内系统消耗电量对比,由于二极管空载电压随着交流侧电压幅值波动,中压能馈装置逆变启动电压通常设置为二级管空载电压加上差值ΔU0.E代表系统能耗,优化后系统能耗降低0.92%. 图7为300 s时间内一个牵引变电所的电压和功率曲线.牵引变电所在整流工况下电压曲线为波谷,功率曲线为波峰;逆变工况下,电压曲线为波峰,功率曲线为波谷.图 7(a)中,电压最大值1 759 V,最小值1 587 V,平均值1 647 V;图7(b)中,功率最大值1.81 MW,最小值-1.76 MW,反馈电量7.65 kWh,牵引电量24.18 kWh,反馈电量占牵引电量的31.64%. 图6 适应度迭代曲线Fig.6 Fitness iteration curve 参数未优化优化ΔU0/V3020r/Ω0.010.09E/kWh442.59438.51 图7 牵引变电所电压和功率曲线Fig.7 Voltage and power curve of traction substation 图8为列车在全线运行过程中上行和下行直流电压曲线.图中上行电压最大值1 776 V,最小值1 572 V,平均值1 644 V;下行电压最大值1 791 V,最小值1 569 V,平均值1 646 V. 图8 列车电压曲线Fig.8 Train voltage curves 图9给出了优化前后主变电所有功功率的对比,优化后增加了下垂系数,有功功率反向峰值减小,牵引变电所之间功率分配更加均匀,再生制动能量更多的被负荷利用,反送到城市电网的电量减少. 图9 优化前后主变电所有功功率对比Fig.9 Comparison of active power in main substation before and after optimization 发车间隔300 s,进化代数50,种群规模100,交叉概率0.4,变异概率0.001,中压能馈装置具有牵引供电和能量回馈功能.图10给出了优化结果,优化后系统最小能耗为434.32 kWh. 图10 适应度迭代曲线Fig.10 Fitness iteration curve 表4为优化前后300 s时间系统能耗对比,优化后系统能耗降低2.23%,与表3对比可以看出,开通牵引供电功能后,因为整流工况直流电压可控,系统节能效果更好. 表4 优化前后结果对比 图11为300 s时间内一个牵引变电所的电压和功率曲线. 图 11(a)中电压最大值1 752 V,最小值1 636 V,平均值1 681 V,与图7(a)对比可以看出,电压均值更高,因为采用中压能馈装置辅助牵引供电,可以增加供电容量、稳定直流电压、提高直流供电品质、有利于列车在高峰期保持通过能力.图 11(b)中功率最大值2.05 MW,最小值-2.00 MW,反馈电量9.22 kWh,牵引电量35.80 kWh,反馈电量占牵引电量的25.74%. 图11 牵引变电所电压和功率曲线Fig.11 Voltage and power curve of substation 图12为列车在全线运行过程中上行和下行直流电压曲线.图中上行电压最大值 1 778 V,最小值1 619 V,平均值1 678 V;下行电压最大值1 793 V,最小值1 622 V,平均值1 679 V,对比图8列车直流电压明显提升,通过能力更强. 图12 列车电压曲线Fig.12 Train voltage curve 图13给出了优化前后主变电所有功功率的对比,优化后主变电所有功功率反向峰值减小,再生制动能量更多被负荷利用. 图13 优化前后主变电所有功功率对比Fig.13 Comparison of active power in main substation before and after optimization 1)通过中压能馈装置整流进行牵引供电,可以增大供电容量,稳定直流电压,提高供电质量. 2)直流输出特性采用下垂控制可以改变再生制动能量在牵引所之间的分配,减少再生制动能量返送城市电网. 3)中压能馈装置可以调节和控制牵引供电系统的潮流,开通牵引供电功能,在整流和逆变全工况下进行潮流控制,可以达到更好的节能效果. 4)牵引供电系统车-地配合参数与列车牵引制动特性、运营组织模式、线路条件等多因素相关,本文提出的建模分析和优化方法为工程应用提供了参考.3 仿真研究


3.1 算例1
3.2 算例2


4 结论
