中国城市轨道交通全自动运行系统技术及应用
2019-05-05郜春海李开成
宁 滨,郜春海,李开成,张 强
(1.北京交通大学,北京 100044;2.交控科技股份有限公司,北京 100070)
轨道交通全自动运行(Fully Automatic Operation,FAO)是基于现代计算机、通信、控制和系统集成等技术实现列车运行全过程自动化的新一代轨道交通控制系统,是进一步提升现有基于通信的列车运行控制(Communication-based Train Control,CBTC)系统的安全性和效率的国际公认发展方向[1-3].国际公共交通协会报告指出,截至2017年3月,全球FAO运营线路已包含38个城市的56条线路,总里程达到850 km,覆盖890个车站.
FAO系统具有传统CBTC系统之外的更多优点,包括如下方面[4-8]:1)高度自动化、多专业系统集成度深,各系统高效联动控制,实现列车运行的全面监控及乘客服务功能;2)充分的冗余配置,保证运行高可用性;3)更加完善的安全防护功能,增强了工作人员、乘客、障碍物、应急情况下的防护;4)提高效率、节能减排,实现列车运行、供电、车站机电设备的综合节能优化运行;5)完全兼容常规驾驶模式.因此,FAO系统是城市轨道交通技术的发展方向.目前我国尚处在起步阶段,与国际差距较大.但随着我国国产化信号、综合监控、车辆等关键系统已实现自主化,并且具有一定的成熟性,我国已经具备研发FAO系统的条件,因此,在新一轮的建设中有必要大力发展自主化FAO系统,推动自主化装备达到国际先进水平并引领该项技术.2008年7月开通的北京机场线,是国内首条按照全自动运行等级建设的线路.
本文作者结合2017年12月国内首条采用自主化全自动运行技术的北京燕房线,介绍中国城市轨道交通全自动运行系统的技术及应用现状.
1 全自动运行技术
1.1 北京燕房线概况
燕房线工程由主线、支线2部分组成,如图1所示.其中:主线长约14.4 km,设站9座;支线长约6.1 km,设站3座.
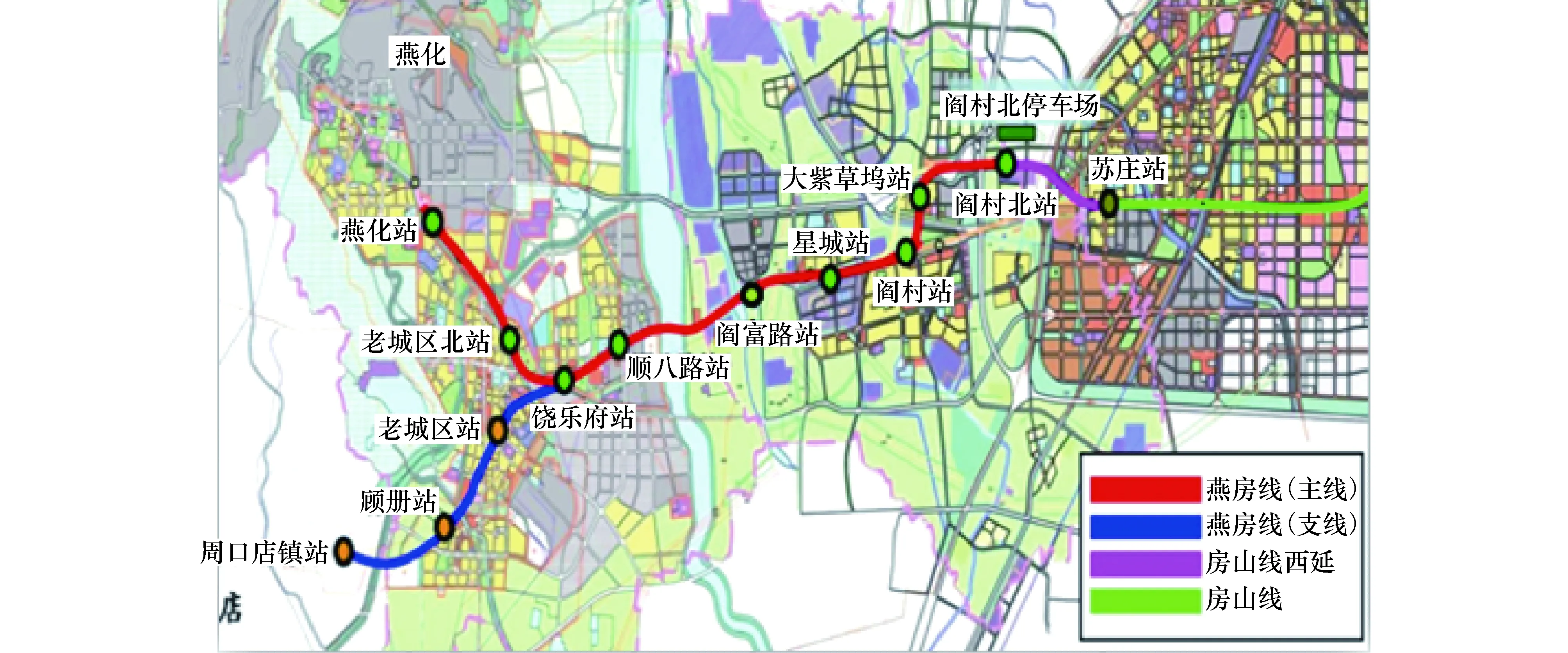
图1 燕房线全线图Fig.1 Whole line diagram of Yanfang Line
1.2 FAO系统集成
轨道交通全自动运行系统的研究重点是通过车辆、信号、通信、综合监控多专业协同控制,实现运行全过程最佳化、自动化控制以及安全防护.为了使其符合我国城轨高密度运营、服务质量要求高的需求,需要设计涵盖各种工况的FAO系统运营场景、运营规则、危险源档案、应急处置方案等,以此为依据形成集成体系.北京燕房线采用的FAO系统实现了如下理论与技术创新:
1)设计了适用于我国城轨特点的FAO系统运营场景.采用基于时间自动机理论的模型检测形式化工具UPPAAL构建运营场景的时间自动机网络模型,通过模型的实时仿真、反例分析和形式化验证,分析场景的功能要求、性能要求和安全属性要求.首次建立了全自动运行系统各专业调度工作负荷的预测模型,提出了基于负荷的全自动运行系统控制中心人因资源需求及配置方法,设计了全自动运行轨道交通系统人员组织架构,以及不同运营场景的岗位配置、交互过程和操作流程.形成了世界上首个基于列车运行全过程和多专业协同的全自动运行场景文件和运用规则,包括41类300余项场景和69类运用规则,如图2所示.该成果可为我国新建全自动运行线路的系统需求分析、系统设计和安全运用提供极具价值的参考和依据.
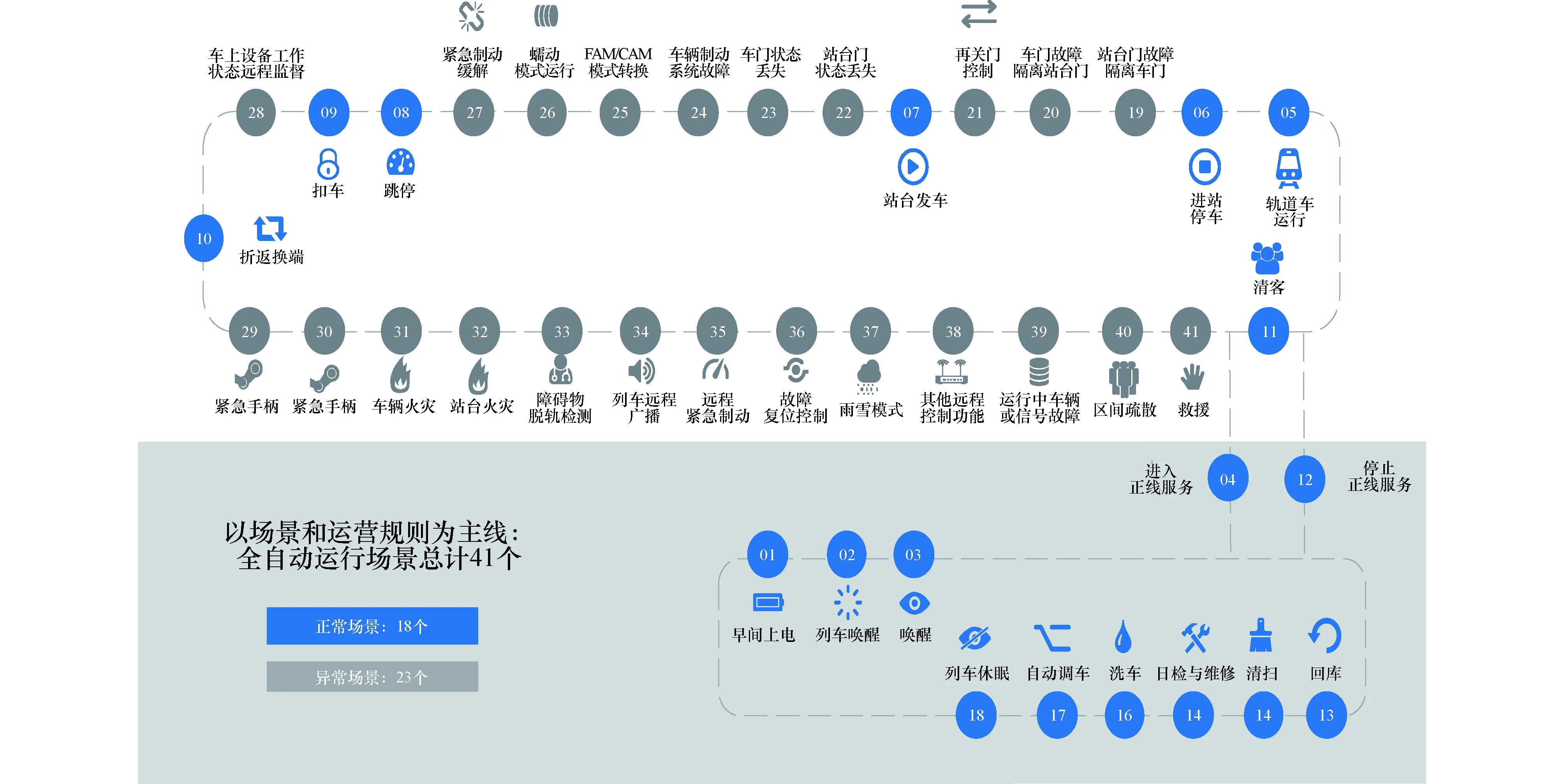
图2 全自动运行场景Fig.2 Full automatic operation scene
2)建立了全自动运行系统安全风险分析和应急处置流程设计方法体系.国内首次采用STAMP理论、STPA危害分析与运营场景相结合的方法,分析了涵盖全线、列车运行全过程、关联多专业人员和设备的人机防护需求,有效识别了取消车上司机导致系统功能和操作流程变化所引入的危险源,形成了全自动运行系统的危险源档案库,可作为我国全自动运行系统新线建设的安全需求输入;创建了全自动运行系统应急处置流程设计方法体系.提炼全自动运行系统应急处置流程的需求,调度员的认知特性和控制中心的组织特性.构建了全自动运行系统应急处置流程的认知体系,从调度员认知和控制中心组织性角度,针对全自动运行系统应急处置过程中的不确定性、群调度员特征,提出了控制中心多准则、多调度员下的应急决策混合评价方法,为全自动运行系统应急处置流程的设计与评价提供了理论和方法支撑.
3)创建了适用于我国城市轨道交通运营特点的全自动运行系统集成体系.建立了FAO系统集成通用模型,保证整体系统的兼容性、一致性、完整性、正确性,建立需求跟踪矩阵,通过结构化方法对运营需求、系统功能和全自动运行系统的设计方案进行简洁、清晰的检查,确保在系统的概念和设计过程中所有的运营需求全面落实,在集成和验收阶段各项需求能被全程跟踪和测试.
4)涵盖了符合国际标准最高自动化等级以车辆、信号、LTE-M和综合监控为核心的整套技术装备.针对车辆无司机工况下快速自动应急处置需求,研发了全自动驾驶车辆关键系统远程控制技术,实现了远程转向架制动切除、远程复位、远程紧急制动、远程停放制动施加及缓解等功能.针对列车全过程无司机自动运行控制需求,设计了具备列车自动休眠与唤醒、段内自动运行、自动洗车、站间自动运行、自动开关车门和站台门、站内自动跳跃对标、障碍物和脱轨检测及事故近场安全防护等功能,符合最高自动化等级要求的全自动运行信号控制系统,实现了列车在全线的自动运行.提出了基于优先级调度的综合承载技术,首次实现了车辆多专业、多业务一网承载,攻克了LTE-M的互联互通关键技术,实现了系统域间端到端切换整体时延小于1 s;提出空口共享逻辑信道视频组播技术和端到端业务数据保护技术,显著提高空口频谱资源利用率.制定并发布了LTE-M相关技术行业标准7项,研制了国内首套轨道交通定制化的LTE-M系统装备,推动了LTE-M技术在轨道交通中的应用.设计了基于新一代工业数据安全总线为核心的分布式大容量实时数据库引擎,首次构建包括车辆、信号、通信等20多个专业子系统的综合监控系统,系统安全等级达到SIL2,提高了运营调度效率和运营安全.
1.3 列车无人驾驶技术
全自动运行系统中列车运行可以在无司机的条件下完成.将操控列车、服务乘客、感知环境以及应急处置等原由司机完成的任务改为由设备承担.为实现全时段、全天候的列车无人驾驶,需要攻克以下技术难点:
1)操控列车、服务乘客、感知环境以及应急处置的司机任务模型的建模技术.结合层次任务分析与认知任务分析,将司机作业任务充分分解到视觉、听觉、知觉、心理动作4个处理通道,可以基于多资源理论,从时间压力、认知需量和行为冲突3个维度分析司机认知工作负荷的影响.建立城市轨道交通司机驾驶操纵作业任务模型、司机行为时间预测模型、列车发车时操纵行为时间模型,如图3所示.
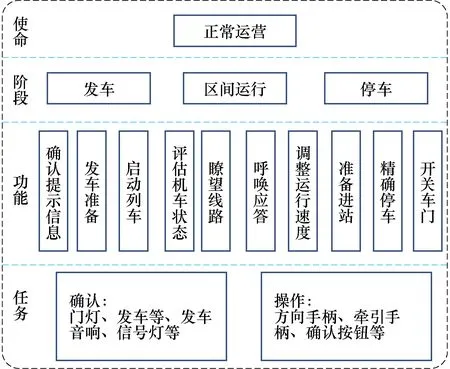
图3 司机任务及层次分解模型Fig.3 Driver’s task and hierarchical decomposition model
2)列车静动态唤醒自检、跳跃对标、雨雪模式控制、休眠等正常运行场景的控制策略.针对列车全过程无司机自动运行控制需求,设计了自动根据列车运行计划休眠与唤醒、段内自动运行、自动洗车、列车与车库门联动、无人区维修人员防护等控制策略,实现了车辆段内的无人驾驶.设计了站间自动运行、自动开关车门和站台门、基于安全通信的车门及站台门对位隔离、站内自动跳跃对标、自动折返、雨雪模式运行等控制策略,实现了列车在正线的无人驾驶.
3)列车障碍物和脱轨检测、制动重故障下的分级控制、远程复位重投等紧急情况下应急处置技术.研制了接触式障碍物和脱轨检测系统,在特殊工况下最大程度地保护乘客安全.设计了走行部在线监管技术,实现了关键走行部件故障预警及报警功能.针对车辆无司机工况下快速自动应急处置需求,研发了全自动驾驶车辆关键系统远程控制技术,建立了车辆与控制中心可信、高速双向数据交互通道,实现了远程转向架制动切除、远程复位、远程紧急制动、远程控制空调、远程再关门、远程控制受流装置、远程控制照明、远程停放制动施加及缓解等功能,实现了全时段、全天候的列车无人驾驶.相对于国外无人驾驶,丰富并精细化故障应急的处置功能,提升了处置能力.
1.4 综合自动化调度管控技术
全自动运行可以提升全线列车运行全过程智能管控能力,降低应急处置时间30%,实现中心对轨旁所有机电设备、在线全部列车及车内乘客的监视控制、应急处置、远程服务.具体来说,全自动运行综合了如下技术:
1)多专业协同智能监控技术.创新设计“双缓存”和变位传输通信融合技术,解决了多专业、大容量异构实时数据处理和大批量数据实时显示与渲染的技术难题,统一了行车、电力、环境、乘客、车辆、维修等调度联动总线,实现了基于时间、事件、序列的人机协同智能监控,满足无人驾驶的需求,进一步提高了调度效率,数据变化平均刷新周期小于2 s.实现了中心对轨旁所有机电设备、在线全部列车及车内乘客的监视控制、应急处置、远程服务,进一步提高了全自动运行下的运营安全与乘客体验.
2)车辆、通信、信号、综合监控等多专业的智能应急联动和辅助决策技术.设计了支持面向对象建模的新一代分布式实时数据库计算引擎,解决了复杂系统间的智能协调联合控制,实现对全自动运行的智能管控.创新增强了对位隔离、蠕动模式运行、紧急呼叫、紧急制动手柄、障碍与脱轨检测联动、车辆烟感报警联动、站台门与车门间隙夹人检测联动等应急处置联动控制功能.与传统应急处置相比,联动控制量提高20%以上,降低应急处置时间约30%,提高了灾害及故障模式下的智能化处理能力,进一步提高了轨道交通的运营安全性.
3)多专业综合运维管理技术.打破传统运维系统的“信息化孤岛”,实现整个运营系统的闭环智能维修.设计了异构数据清洗和数据融合、诊断融合技术,实现了通信、机电、车辆、信号设备诊断数据的分类传输与重构,减少了中间层级的数据冗余处理,提高了数据质量,降低设备误报警率.设计了基于样本的立即决策和综合决策报警系统,实现了对车辆等核心机电设备的在线状态检测和预测诊断.设计了一套基于ETL的标准企业服务总线(Enterprise Service Bus,ESB)技术,解决了维修管理系统与各类设备在线监测系统的无缝闭环管控,实现了融合全生命周期成本管理(Life Cycle Cost,LCC)的智能维修,提高了作业的安全性,优化了设备维修模式,提升了设备维修成本精细化管理能力[8].
1.5 基于全生命周期的RAMS综合保障技术
RAMS综合保障技术保证了全系统的鲁棒性,并首次通过了全专业RAMS评估.具体包括如下方面:
1)全系统顶层设计、逐层分配、潜在失效模式的分析与处置等RAMS工程方法.首次从系统顶层整体和各子系统多角度提出协调一致的RAMS指标技术规范,并将指标逐层分配到各专业、各子系统、各设备.利用鲁棒性设计方法、潜在失效模式的分析方法等,在总体设计阶段将RAMS指标与设计方案进行适配,确保RAMS指标在详细设计中得以充分考虑.构建了基于引导词的危害模式识别技术,针对跨专业、综合性强的场景进行安全分析.根据高可靠性、安全性产品设计特点,构建支撑全生命周期产品研发的集成开发平台,能够为全系统RAMS分配、体系框架、硬件、软件的可靠性设计、可靠性试验等关键环节提供技术与工具支持.构建故障模式模拟、故障注入机制和可靠性增长试验等技术,创设多层次仿真测试环境,实现降级运行、故障-安全、维修性等RAMS测试与分析、验证,从系统工程角度全方位保障RAMS指标的有效实施.首次通过了全专业RAMS评估,保证了系统的整体RAMS水平,从系统总体提升了RAMS指标.
2)基于差模多样化设计的冗余技术.首次在调度层实现了多角色异地多重冗余设计,设置主备控制中心,两中心分别设置热备冗余的服务器,实现了中心级服务器四重冗余.行调、电调、环调、车辆调和乘客调均可通过权限管理实现控制功能切换,增强了全自动运行的冗余控制.首次在控车层实现了全自动运行关键系统多样化冗余控车策略,车辆和信号采用网络优先、硬线后备的冗余策略,硬线控车实现网络故障下的后备运行,实现智能化控车冗余机制.同时,通过车辆关键系统部件冗余、车-地无线通信冗余、头尾传感器(测速设备、BTM等)冗余,提升了全自动运行系统的可靠性、可用性.
3)实验室、样板段、试运行等全过程确认验证体系.提出了适用于不同测试需求的分布式仿真建模方法,设计了FAO测试案例集,构建了可动态配置的FAO半实物仿真测试平台,利用构建的系统仿真测试平台4.6万测试用例保证产品和系统的完备测试,通过样板段完成了FAO系统覆盖全场景功能测试,利用全线联调联试充分验证了FAO系统的功能完整性和稳定性,确保达到工程预期.通过运营部门介入的试运行以及乘客介入的试运营阶段,全系统、全生命周期验证确认了系统功能、性能、服务水平.燕房线列车运行图兑现率100%,列车运行正点率99.99%,各主要行车相关服务指标达到设计期望水平.
2 FAO技术展望
未来FAO系统仍然需要在以下3个方面开展研究:
1)系统可靠性保障.
设备取代人实现了系统自动化程度的提升要求全自动运行系统应具有更高的可靠性,这是保障全自动运行系统稳定运行的基础.现有全自动运行系统中,信号设备增强了冗余配置,车辆加强了双网冗余控制,增加了与信号、PIS的接口冗余配置等.但这种方法会提高系统的成本和复杂性,因此还需要在实际中摸索更加行之有效的方法.
2)突发事件应急处置.
FAO系统的最高等级是轨道交通系统可以具备自动监测和处理运营中发生的危险,如火灾、设备故障等,这需要进一步深度集成信号、行车、供电、车辆等专业的应急处置功能,提升应急处置能力.目前以行车指挥为核心,实现正常及故障情况下多专业自动联动将会为未来的深度集成奠定基础.
3)多目标优化智能运行.
列车运行过程需要满足安全、准时、舒适、精确停车、节能等多个目标.不同运营场景下对各个目标的需求不同,FAO系统需要自动识别当前系统运营的状况,明确多个优化目标的权重.当各个优化目标的权重确定后,如何进行优化和控制是最终实现的关键.
3 结论
全自动运行系统代表了未来轨道交通的发展方向.近年来我国在FAO系统集成、列车无人驾驶技术、综合自动化调度管控等全自动运行技术方面的突破缩小了与国外技术的差距,实现了“并跑”.但仍然需要在系统可靠性保障、突发事件应急处置以及多目标优化智能运行等方面深入研究,进一步提高系统弹性和智能化水平的理论、方法和技术,为轨道交通可持续发展提供支撑.
