基于自适应评价设计的带式输送机速度控制优化
2019-05-03张国鸣
张国鸣
(神华北电胜利能源有限公司,内蒙古锡林浩特 026015)
0 引言
带式输送机[1-3]相对于其他运输方式,具有运输效率高的特点,因而广泛应用于中短途散装固体物料的搬运和输送系统中。带式输送机是煤矿的主要运输设备,其传动系统的控制效果直接影响着煤炭生产的安全性、可靠性和成本。同时,皮带输送机工作过程中会消耗大量的电力能源,考虑到经济效益和成本的因素,如何降低带式输送机的能源消耗的研究十分必要。
带式输送机是一种典型的电能—机械能转换系统。其能源效率可分为4 个部分:性能效率、运行效率、设备效率和技术效率。对大多数能源系统来说,提高能源效率可以很容易地提高运行效率和设备效率,带式输送机也是如此。
速度控制[4-6]是提高带式输送机运行效率和降低能耗的有效途径之一。传统的电传动系统由于启动速度不平稳,导致皮带脱轨或断裂,甚至发生安全事故。因此,将一种新型的智能控制方法引入带式输送机的速度控制中,对解决以上这些问题具有重要的理论和实践意义。
带式输送机的速度控制有两种方式:被动控制和主动控制[7]。被动速度控制是根据未来几分钟或几小时内物料流量的潜在峰值来选择合适的带速。根据某一时间段内作业卸料机的数量,可以确定该时间段内料流的势峰。然后调整输送机的速度,使其与物料流量的潜在峰值相匹配,或与可用卸料机的数量相匹配。主动速度控制能够实时监控物料流动,根据实际料率的变化自动调整输送机的速度,保证输送带上散装物料的截面面积最大。被动速度控制根据未来时间间隔内料流来选择一个固定的运行速度。因此,物料流动的微小或暂时的变化不会导致皮带速度的变化,因此被动速度控制是一种半最优的方法。而在主动速度控制中,物料流动的变化是一个主要的速度调节指标。如果偏差较大,则调整输送机速度以减小偏差。因此,与被动速度控制相比,主动速度控制的带速平均值较低。因此,主动速度控制有望实现好的节能效果。
最优控制[8]通常被认为是一种离线控制策略,它试图在一定的约束条件下使性能指标达到最大值或最小值。在设计最优控制器时,需要知道系统的全部动态。动态规划是求解最优控制问题的一种有效方法,是一种基于贝尔曼最优性原理求解优化决策过程的数学方法。在实际应用中,动态规划方法通常在离线情况下使用,并且在处理复杂系统优化控制时容易受到“维数灾”问题的影响,导致无法应用动态规划得到最优解。
为了克服这一问题,自适应评价设计及其相关研究取得了许多令人振奋的成果,该方法基于强化学习和行为评价体系结构获得近似最优控制策略。自适应评价设计方法是一种求解最优控制问题的有效方法,近年来备受关注。一般来说,自适应评价设计两个部分组成:一个是执行部分能够根据被控系统生成控制输入,另一个是评价部分用于评估当前控制作用的性能,并更新控制行为以提高性能。
因此,利用自适应评价设计算法来实现带式输送机的速度控制,具有良好的应用前景。首次尝试将自适应评价设计应用于带式输送机的速度控制器设计,通过迭代结构逐步求解出最优速度控制,为提高带式输送机的运输效率、延长其使用寿命提供一种可行的解决方案。
1 动态规划
1.1 目标系统
考虑一类具有以下形式的离散系统:

其中,x(k)是系统的状态,y(k)是系统的输出,u(k)是系统的输入。
为了便于算法的设计,假设离散系统是能观和能控的。考虑的参考轨迹动力学特性为:

定义变量z(k)满足:

根据状态方程(1)和参考轨迹系统(3),可定义增广离散系统为

1.2 贝尔曼方程
最优跟踪控制问题的核心是找到最优控制策略u(k),使目标系统的输出y(k)跟踪参考轨迹r(k),同时其性能指标达到最小。本研究的跟踪控制问题的指标函数具有如下形式:

其中,γ 是折扣因子,Q 和R 都是对称正定矩阵。
根据动态规划的思想,上述跟踪控制问题也可以表示为

对于任意的可容许控制u,其对应的贝尔曼方程为

其中,U(z(k))=(y(k)-r(k))TQ(y(k)-r(k))+u(k)TRu(k)。
根据贝尔曼最优原理,跟踪控制问题的最优性能指标为

对应的最优控制策略为

动态规划方法的核心是贝尔曼最优原理,对于跟踪控制问题,其过程是对每一步的控制策略u(k),求解性能指标函数(8),然后确定出满足最优性能指标函数(9)的最优控制,从而得到一个最优控制策略(10)。然而,对于动态规划方法,随着系统维度的增加,其计算复杂度会显著增加,即“维数灾”问题。为了克服这个问题,近年来自适应评价设计方法以其自适应学习的特点,被众多研究者广泛关注,成为了一个研究热点。
2 自适应评价设计
2.1 线性二次型跟踪控制
对于所要研究的跟踪控制问题,假设系统状态x(k)和参考轨迹r(k)组成的二次型性能指标函数:J(k)=V(k)=。将其代入式(8),可以得到zT(k)Pz(k)=(yk-rk)TQ(yk-rk)++γzT(k+1)Pz(k+1)。
将目标系统状态方程代入到上式,可以得到代数黎卡提方程。


2.2 自适应评价设计算法
自适应评价设计算法是一种基于贝尔曼最优性原理的迭代算法。当使用自适应评价设计算法求解最优控制问题时,通常是通过迭代求解代数黎卡提方程(11)和反馈控制策略来得到最优控制。
(1)自适应评价设计算法。从任意状态z(k),选取一个初始容许的控制,进行如下两步迭代直至收敛。
(2)策略评价。求解矩阵Pi+1。


本文研究的自适应评价设计算法是通过迭代求解李雅普诺夫方程(13)来得到最优控制。自适应评价设计算法作为一种近似算法,在迭代过程中得到的控制策略制ui(k)和性能指标函数Vi(k)通常不是实际系统的最优值。然而,当迭代指数 趋于无穷时,它们最终收敛于相应的最优值。
3 仿真验证
考虑如下带式输送机模型:
通过使用自适应评价设计算法的策略评价方程(13),可以迭代求解出性能指标函数P,通过使用策略改进方程(14),可以迭代地得到输送机的优化控制策略u。
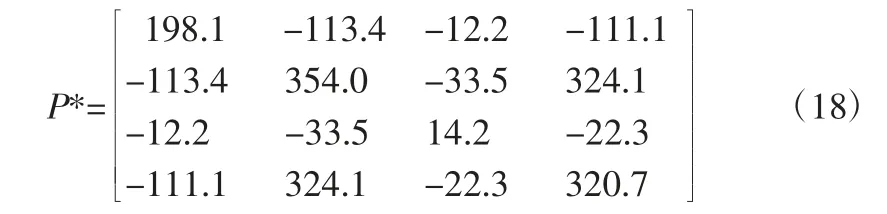
该系统的最优性能指标函数P*为
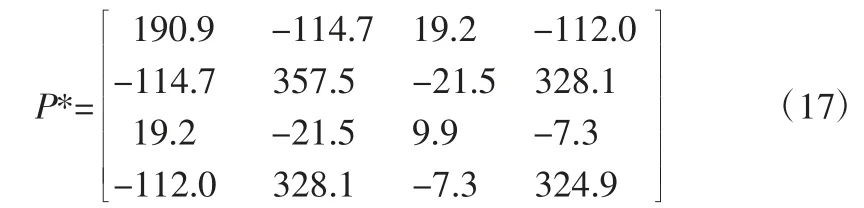
通过使用自适应评价设计算法(16),迭代求解得到性能指标函数P*。
从仿真图1 中可以看出,使用自适应评价设计算法,随着迭代过程的进行,策略评价方程(13)能够迭代求解出性能指标函数P。从图2 可以看出,随着迭代学习的进行,通过自适应评价设计算法所获得的控制策略(14),能够使带式输送机系统的速度输出最终跟踪物料加载的参考轨迹。
为了保证自适应评价设计算法能够学习到系统的全部模态,就需要在仿真中引入一个探测噪声信号。迭代学习过程中的探测噪声如图3 所示,在300 步之后,探测噪声从控制策略u(k)中移除。
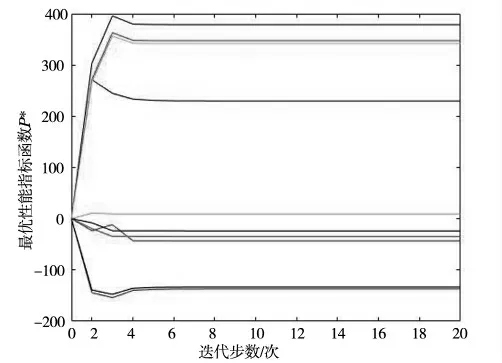
图1 矩阵P 的收敛过程

图2 算法学习过程
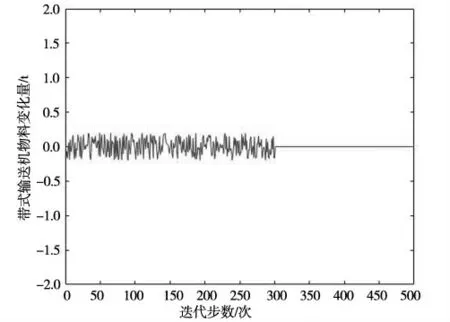
图3 外加扰动信号
4 结论
通过利用自适应评价设计算法的自适应迭代学习能力,设计了一种用于带式输送机的速度控制优化方案,得到了以下3 个结论。
(1)将自适应评价设计应用于带式输送机的速度控制器设计,通过迭代结构逐步求解出最优速度控制。
(2)基于自适应评价设计算法的速度控制方法,能够根据来料的变化自适应地调节带式输送机的运行速度,提高运输效率。
(3)由于自适应评价设计算法具有较好的学习速度,能够有效延长带式输送机使用寿命。
