小粒种子电动播种机作业质量监测系统设计与试验
2019-04-29邱兆美张巍朋姬江涛贺智涛
邱兆美 张巍朋 赵 博 姬江涛 金 鑫 贺智涛
(1.河南科技大学农业装备工程学院, 洛阳 471003; 2.机械装备先进制造河南省协同创新中心, 洛阳 471003;3.中国农业机械化科学研究院, 北京 100083)
0 引言
小粒种子播种机是现代化蔬菜栽培常用的播种机械,播种机在田间作业时易出现“断条”等漏播现象,从而导致农业减产。漏播是影响播种机作业质量的关键因素,开发高精度的漏播监测系统是目前播种领域研究的热点之一。播种机在播种作业时具有播种过程全封闭的特点,仅凭人的感观无法直接监测其作业质量,因此,研发播种质量自动监测系统显得尤为重要。
国外的精量播种发展较早,精密播种检测系统的研究比较成熟,技术相对较为完善,针对播种漏播检测研究出了不同的检测方式。一些学者通过在排种管内安装传感器或对管道内落种情况的检测[1-4]实现播种质量监测。文献[5-6]分别利用高速摄影技术和电容特性完成对精密播种均匀性和落种速度的检测。约翰迪尔公司对精量播种机的研究较早,且对精量播种质量检测技术成熟,研制的用于播种质量监测的播种传感器、Seed Star监视仪[7]以及与其他农机相互协调配套的监控设备,通过光电传感器与信号采集电路相互配合,能够检测漏播、断条等现象,并在监视仪上进行各种图形化统计及分析,使作业人员清晰了解播种质量,实时掌握播种质量信息,为作业数据分析处理后的研究提供参考依据。国外对精量排种器的漏播状态监测及补种的相关研究成果显著,但其成本较高,适用机具对象、作业环境与国内相距较大。
国内针对播种漏播检测的研究相对较晚,但发展较快。如一些专家学者[8-12]采用光电传感器和红外发光二极管对漏播情况进行监测,光电检测成本较低,且系统简单得到广泛使用,但传统光电检测系统对粒径小于4 mm的种粒难以检测。周利明等[13-14]采用电容法根据种子介电特性对相隔种子电容脉冲峰值的间隔,设计了基于电容信号的传感器,实现对种子漏播与重播现象的检测。金鑫等[15]采用红外光电检测技术实现了种子流量的实时监测,并采用变介电常数电容式传感器监测排肥情况,能够对小麦播种作业质量进行有效监测,降低了生产成本。张霖等[16]采用压电原理利用陶瓷片对种粒计数与漏播进行检测,通过对系统阻尼振动频率与阻尼比分析,将种子短暂的冲击作用变换为单个波峰电压信号,完成对种粒的准确计数。高速摄影与图像处理技术等[17-23]也被广泛应用在播种监测领域,但所采用设备和处理系统较为复杂,不便于在播种机身装配及田间应用。黄东岩等[24-25]基于PVDF压电薄膜特性研究了压电薄膜的工作机理,运用压电薄膜检测技术分析种子下落的运动碰撞,实现了对播种质量的检测。丁幼春等[26]利用光纤传感器对油菜精量排种器的性能检测、漏播检测与补种进行了研究,由于光纤材料特殊传感器成本高,传感器在播种机上的装配价格高于播种机自身价值,代价太高,不利于在实际应用中推广。
为了对蔬菜播种机播种质量进行监测,实现小粒种子精量播种,本文采用具有面检测特性的光电传感器,对蔬菜小粒种子排种进行实时监测,设计播种质量监测系统,实现对粒径0.5~1.5 mm小粒种子的检测。
1 小粒种子电动播种机
针对小粒种子粒径小、质量轻、不易监测的问题,设计了具有实时检测功能的小粒种子电动播种机,主要由播种系统和智能监测系统两部分组成,如图1所示。

图1 播种机组成框图Fig.1 Diagram of seeder block
播种系统包括前镇压轮、排种器、电源箱、后镇压轮、电机、调控器、覆土器、开沟器等,结构如图2所示。该电动播种机由电源箱提供电力,供电机和调控器运转。电机安装在后镇压轮内部,后镇压轮经链条连接带动排种器轴转动,排种器轴带动排种轮转动实现排种,种子通过排种管落入开沟器开出的种沟内,经覆土、镇压完成播种。调控器安装在播种机扶手一侧,通过对电机转速的控制实现播种机前进速度的调整。前镇压轮位于开沟器前端,主要用于将土壤平整压实以提高开沟稳定性。

图2 小粒种子电动播种机结构图Fig.2 Structural diagram of small seed electric seeder 1.前镇压轮 2.排种器 3.电源箱 4.后镇压轮 5.调控器 6.电机 7.覆土器 8.开沟器
智能监测系统主要包括漏播监测子系统、排种监测子系统和可视化子系统。漏播监测子系统主要采用具有面检测特性的光电传感器实现对播种量和漏播情况的实时监测。排种监测子系统采用CMOS图像传感器对种子运动过程进行视频采集,实现对排种器排种、种子下落的实时监测。可视化子系统包括STM32微控制器和车载计算机,可完成采集数据的实时处理、显示和报警,实现作业质量监测过程和结果的可视化。
2 智能监测系统设计
2.1 硬件设计
智能监测系统硬件由漏播监测子系统、排种监测子系统、可视化子系统3部分组成, 系统结构框图如图3所示。
2.1.1漏播监测子系统设计
漏播监测子系统包括传感器检测头、屏蔽电缆线和放大器,如图4a所示。传感器检测头经屏蔽电缆线与放大器相连,放大器配置有持续可变灵敏度调节器,可对检测精度进行微调。
基于电动播种机排种器距地面较近,且排种管下端位于开沟器内部,造成传感器安装位置和检测方式等受到限制,传感器检测头采用矩形红外面检测光电传感器,如图4b所示。传感器检测头采用带活门的矩形结构,固定在排种管中段,置于开沟器上端,如图5所示。基于PMMA透镜红外线LED投光可实现对21 mm×21 mm感应区内0.5 mm以上不透明物体的面检测,且针对红外线检测时对感应区域透光度的需求,排种管采用直径20 mm的透明PVC软管。

图4 光电传感器实物图Fig.4 Diagrams of photoelectric sensor 1.传感器检测头 2.屏蔽电缆线 3.放大器

图5 传感器安装示意图Fig.5 Installation schematic diagram of sensor 1.开沟器 2.光电传感器
漏播监测子系统主要监测排种管内通过的种子数量,反馈播种信息,并对漏播实时报警。排种管中下落的种粒通过传感器检测区域时,由于不透明种粒对光线的遮挡产生遮光量,当遮光量小于设定的阈值时认定为漏播,并输出报警信号。
在实际应用中,传感器输出的脉冲信号经微控制器进行相关处理并判断是否出现漏播或重播现象,再由报警单元实现对应的漏播或重播报警。根据相关标准[27],具体判断依据为0.5d≤vΔt≤1.5d(正常);vΔt>1.5d(漏播);vΔt<0.5d(重播)。其中d为理论株距,m;Δt为相邻两粒种子下落时间间隔,s;v为播种机前进速度,m/s,该速度可由播种机速度传感器获得,本设计使用霍尔传感器作为播种机速度传感器。
播种过程中漏播检测精度易受透光率、振动等影响而降低。本系统采用微分检测脉冲输出模式,不影响因长时间积尘等透光率偏低时的检测效果,能够满足播种质量监测系统的精度。
2.1.2排种监测子系统设计
排种监测子系统包括SDK开发模组和CMOS图像传感器,如图6所示。图像传感器通过数据线与SDK开发模组相连,主要用于监测排种器排种情况。CMOS图像传感器采用可弯曲数据线内置在排种器排种口处,不影响排种器正常排种轨迹,如图7所示。SDK开发模组固定在排种座上,通过逆变器与车载电源转换完成供电,配备专门的影像信号处理IPS硬核,控制指令ARM核,可根据实际进行二次开发。排种监测子系统可实现实时影像采集,具备存储、回放功能,性能稳定,满足监测系统影像采集需要,解决了由于种粒过小和播种机配备部件安装紧密导致的不便于观察落种情况的问题。

图6 CMOS图像传感器实物图Fig.6 Image of CMOS image sensor

图7 CMOS图像传感器安装图Fig.7 Installation diagram of CMOS image sensor 1.排种器 2.排种器轴 3.CMOS摄像头
2.1.3可视化子系统设计
可视化子系统包括微控制器和上位机,微控制器选用单片机STM32,主要用于接收、处理各传感器采集的数据,并将处理后数据上传至上位机,实现监测数据和结果的可视化。
上位机采用多功能一体机,小粒种子电动播种机监测系统平台如图8所示,可执行播种机的启、停操作,并实现作业情况、报警信息和影像监测信息等数据的实时显示、声光报警和存储。

图8 上位机软件操作界面Fig.8 Interface of software operation on upper computer
2.2 软件系统设计
软件系统程序由Visual Basic 6.0语言编写,主要实现播种机启动与停止、漏播管道显示和报警、落种过程实时显示,操作界面如图8所示。
通过操作界面上设置的启动和停止按钮控制电动播种机电机的转动,实现播种机的启停。通过对监测系统播种作物和株距的选择,可改变微控制器内部对播种监测阈值的设定,实现传感器对0.5~1.5 mm不同粒径种子的监测,且保证监测精度满足监测要求。
主系统软件流程图如图9所示,首先微控制器上电系统进行初始化,然后设置系统参数,参数输入完毕,按启动键启动电机,同时启动智能监测系统。微控制器进行传感器检测信号的接收、处理,并计算实时播种间距;通过实时株距与阈值对比判断是否发生漏播,实现漏播实时报警。可视化子系统接收并显示来自微控制器处理后数据,实现落种过程、实际播种量、播种速度、报警信息等的可视化监测。

图9 主系统软件流程图Fig.9 Flow chart of main system software
漏播监测子系统监测流程如图10所示,系统上电初始化后,当接收到上位机发出的智能检测系统启动信号,启动子系统所有传感器,并循环检查各传感器工作情况。依据传感器实时检测信息计算相邻两粒落种的时间间隔Δt和播种机前进速度v,获得实时播种间距,并结合理论播种株距判断是否发生漏播现象。若发生漏播现象,则上传可视化子系统,实现相关的作业情况和漏播信息显示和报警。

图10 漏播监测工作流程图Fig.10 Flow chart of operation of leak detection

图11 室内试验Fig.11 Indoor test
3 试验与结果分析
3.1 室内试验
如图11所示,室内试验主要检测小粒种子电动播种机监测系统检测精度,通过选用不同孔径的排种轮,实现监测系统对不同粒径种子检测适应性的测试,验证该播种质量监测系统的使用效果。各检测传感器与播种机合理配置安装,不存在挡种、影响播种机作业等问题,保证了播种机监测系统安装前的作业性能。试验过程中分别针对播种计数、漏播精度检测、落种影像实时显示等系统性能进行测试,并将系统检测结果与人工检测结果进行对比分析。
3.2 播种计数监测试验
为获取实际的落种数量,将光电传感器安装在排种器出种口处,并在排种管下方安装接料袋。为测试监测系统对不同粒径、形状、颜色种子的播种检测精度和系统本身的适应性,选用粒径0.5~0.9 mm的胡萝卜、辣椒种子和1.0~1.5 mm的番茄、菠菜种子。为保证播种量计数的准确性,播种监测系统每次启动时,播种量自动清零。每次试验结束时监测系统平台显示的播种量为测量值,接料袋中人工统计的种数为实际值。重复5次试验,各次试验数据如表1所示。
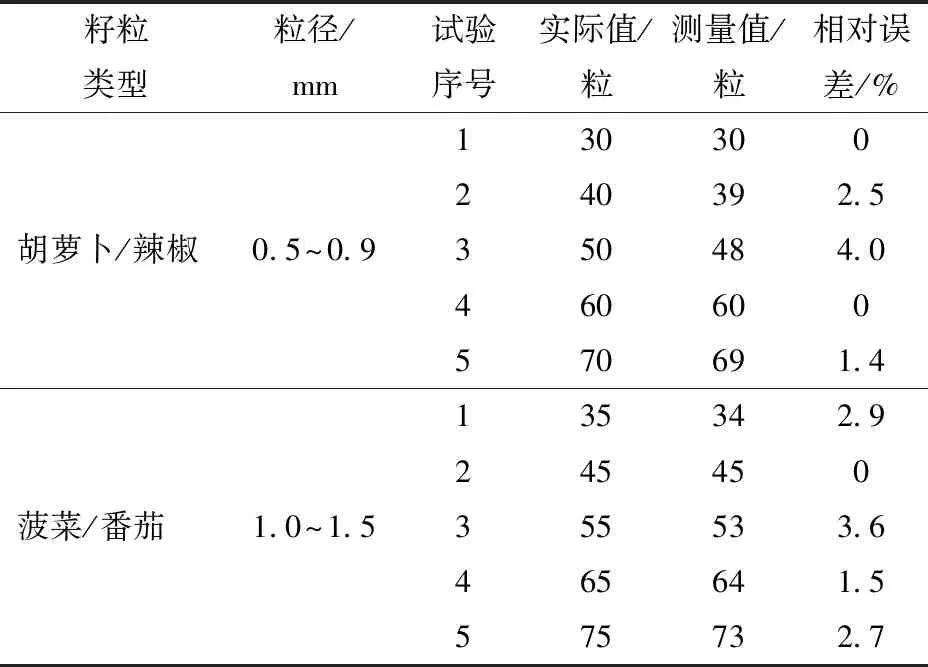
表1 播种计数试验结果Tab.1 Test results of seeding counting
从表1中试验数据可以得出,监测系统对粒径0.5~0.9 mm的胡萝卜/辣椒种子的播种量检测精度相对误差不大于4%;对粒径1.0~1.5 mm的菠菜/番茄种子的播种量检测精度相对误差不大于3.6%。因此可得出,物种和粒径变化对播种质量检测系统的检测精度影响不显著,系统适应性好;本播种质量检测系统适用于粒径0.5 mm及以上小粒种子的播种量检测,且播种量检测准确率达96%,检测精度相对误差不大于4%。
3.3 漏播率监测精度试验
通过人为制造漏播故障的方式进行漏播精度检测试验。试验种床带采用无缝精密橡胶带,其防静电和耐压特点确保了落种的稳定性。为了测试种子粒径、形状、落种密度对漏播率监测精度的影响,选粒径范围在0.5~0.9 mm和1.0~1.5 mm的4种小粒种子,并采用与种子粒径相应的不同孔径的排种轮进行漏播测试。监测系统检测、记录、显示漏播信息,将系统显示的漏播报警次数与人工查看种床带的漏播统计次数相对比,实现系统漏播率测试。同类种子重复试验5次,各次试验数据结果如表2所示。
从表2中可以看出,种子粒径、形状、落种密度对漏播率监测精度的影响不显著,系统适用于粒径0.5 mm及以上小粒种子的漏播监测。漏播监测子系统准确率达92.3%,漏播率相对误差均不大于7.7%,满足监测精度要求。通过试验过程和结果分析发现,漏播未报警是由于报警持续时间小于设置的报警延迟时间,可通过调节传感器响应灵敏度,多次检测调节确定合适延时设置。

表2 种子漏播率试验结果Tab.2 Test results of seed missing sowing rate
3.4 影像监测落种过程精度试验
当种子下落时,通过影像监测子系统实时获取种子下落信息并传到可视化子系统,在检测系统平台中实时显示、记录落种过程。通过实时播放和回放观察不同管道排种、落种情况,将实际播种粒数与影像传输显示的种粒数进行比较,实现对CMOS图像传感器的精度标定和影像显示精度的试验,其试验数据如表3所示。
从表3中可以看出,在3.0 km/h和4.5 km/h播种速度下,该播种质量监测系统影像显示的落种粒数与人工检测实际播种数量相比,相对误差不大于5%,监测精度达95%。其误差产生原因主要是在种子下落过程中,由于CMOS图像传感器焦距标定不合理,对较小粒径的种子拍摄不清晰而没有计入落种数量中,造成误差,使检测精度降低。可以通过精度微调和摄像头焦距多次标定,提升图像传感器实时监测精度。
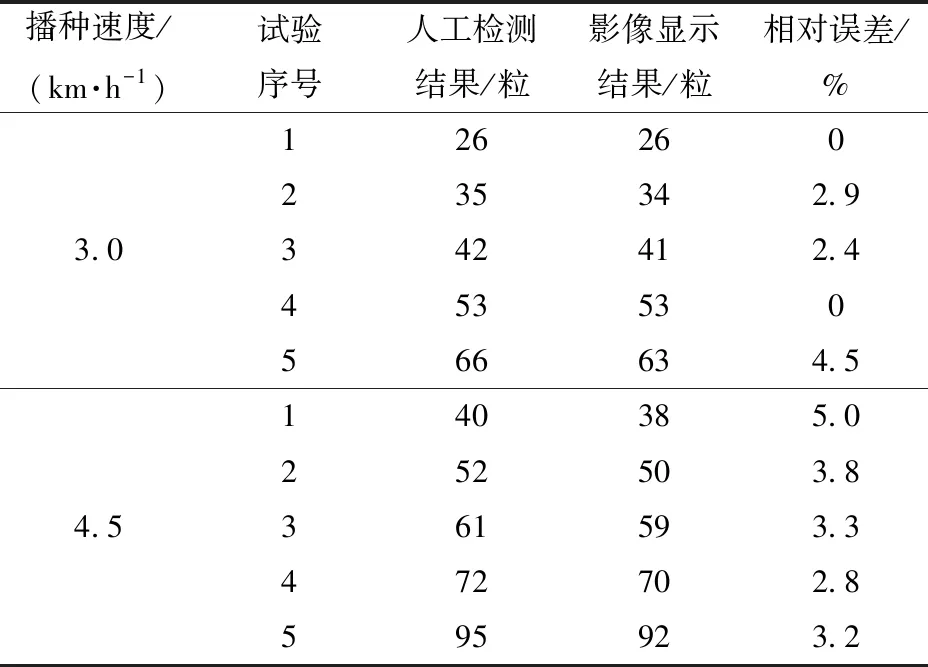
表3 落种图像显示试验结果Tab.3 Test results of seeding image display
4 结论
(1)采用具有面检测特性的光电传感器和CMOS图像传感器,设计了播种质量监测系统,实现了对粒径0.5~1.5 mm蔬菜小粒种子的播种效果监测,该系统能实时准确地检测播种机的播种质量,受种子粒径、形状、株距等影响小,系统稳定性好。
(2)软件系统采用Visual Basic 6.0语言编写,开发的监测平台可实现对播种量、漏播情况和落种过程的实时监测、显示和漏播报警等功能。
(3)试验表明:播种质量监测系统对播种量监测精度达96%,漏播监测精度达92.3%,能够有效地监测小粒种子播种情况,在3.0 km/h和4.5 km/h播种速度下,落种监测精度达95%。本监测系统可实现对小粒种子电动播种机作业质量的实时监测、显示和报警,提高了监测效率。
