汽车电控系统代码自动生成技术的功能实现
2019-04-26冯吉涛
冯吉涛
(烟台汽车工程职业学院 车辆运用工程系, 烟台 265500)
0 引言
随着人们对汽车性能要求的不断提高,汽车电控技术逐渐发展起来,为解决传统封闭式汽车电控系统结构所带来的问题,正逐步展开开放式汽车电控系统的研究,汽车电控系统为满足不断增加的需求复杂程度越来越高,针对特定问题不同制造商提供的解决方案也不尽相同,软硬件系统难以兼容问题凸显,为改善E/E复杂性管理问题,增强可移植性、可扩展性,成为研究的重点。
1 电控系统开发流程
汽车开放系统架构标准 ( AUTOSAR)包括架构、方法学(在对软件架构信息进行描述时采用标准化的数据交换格式)和应用接口,由制造商、供应商及工具开发商联合开发,为车辆系统提供了通用软件架构(基于标准接口)。由SWC组成应用层,采用虚拟功能总线(VFB,由RTE和BSW共同完成)实现SWC的独立性,SWC间及其同底层的通信则通过RTE完成(通过提供一致的接口和服务),底层细节的屏蔽及SWC服务的提供由BSW负责。
结合Matlab并以AUTOSAR方法学的开发流程为依据,需先完成系统级设计(在Authoring Tool中),再通过在Matlab/Simulink中导入系统描述文件完成SWC的提取,Runnable(SWC中)的设计则采用Stateflow完成,代码生成后将SWC描述文件导出,在Authoring Tool中重新导入SWC描述文件,Runnable到BSW任务中的映射在RTE中完成,对Runnable进行设计,并设置BSW各模块(通过Authoring Tool完成),实现底层驱动代码的生成,在此基础上对代码进行融合,电控系统的具体开发流程如图1所示[1]。
2 电控系统代码自动生成技术的生成
2.1 车灯系统SWC设计
本文主要以以汽车车灯控制系统为例,对汽车电控系统代码自动生成技术的功能实现进行研究,车灯系统主要包括信号和照明灯,将车灯系统分为5个SWC(根据功能划分)具体如表1所示。
其中转向灯通过CAN调试终端完成参数的发送、报文的修改(包括跳转频率和最小跳转次数)及车门状态信息(四个车门的状态由报文第1字节低4位分别表示)的查看。分配完SWC功能后,完成SWC、接口和数据类型的建立(在ORIENTAIS中),本文不设计SWC Behavior(SWC的行为无法被Simulink读取),最后再导出系统描述文件[2]。
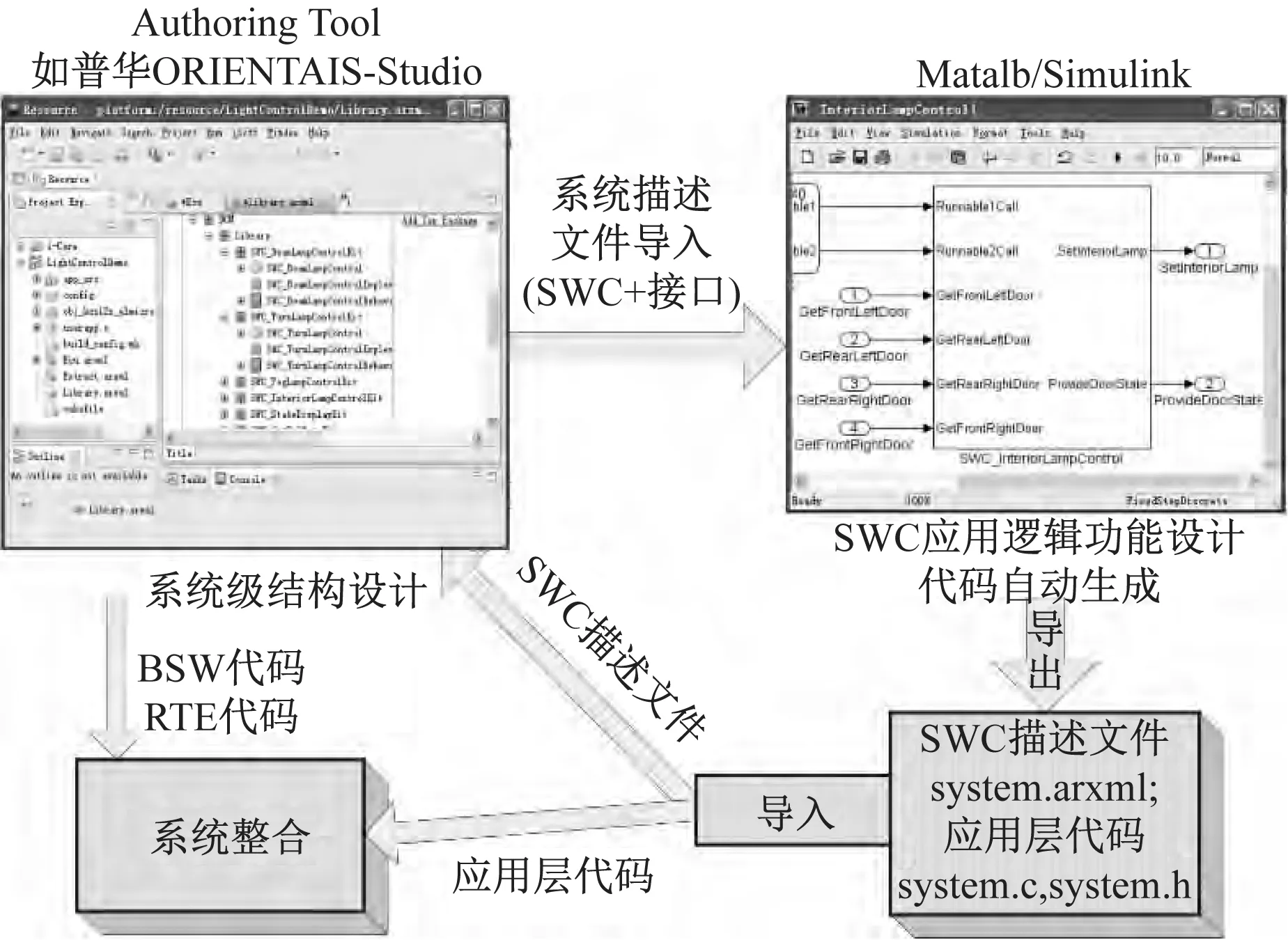
图1 电控系统开发流程
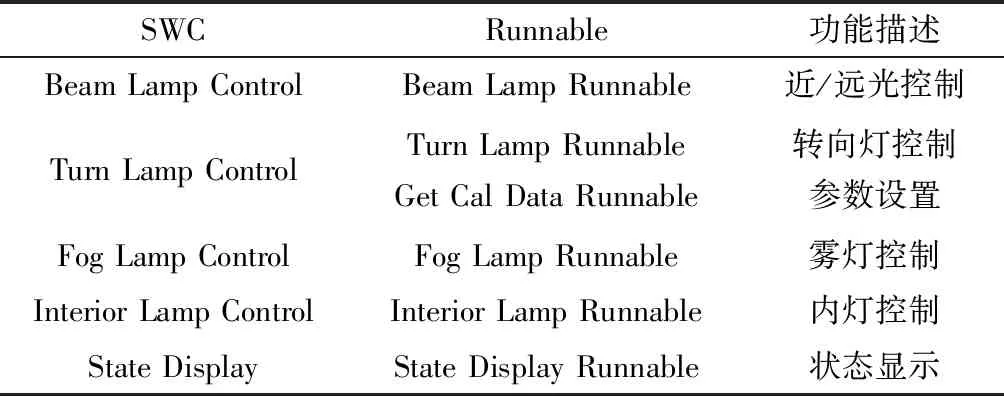
SWCRunnable 功能描述Beam Lamp Control Beam Lamp Runnable近/远光控制Turn Lamp ControlTurn Lamp Runnable Get Cal Data Runnable转向灯控制参数设置Fog Lamp Control Fog Lamp Runnable雾灯控制Interior Lamp Control Interior Lamp Runnable内灯控制State Display State Display Runnable状态显示
2.2 Runnable代码生成
由于在概念上Simulink同 AUTOSAR具备较多的相通性,而得以在AUTOSAR开发过程中应用,在AUTOSAR设计流程中,模型的逻辑功能的建立及模型逻辑功能正确性的仿真验证主均需由Simulink负责完成,在汽车电控系统的设计过程中二者的对应关系(常用术语),如表2所示。
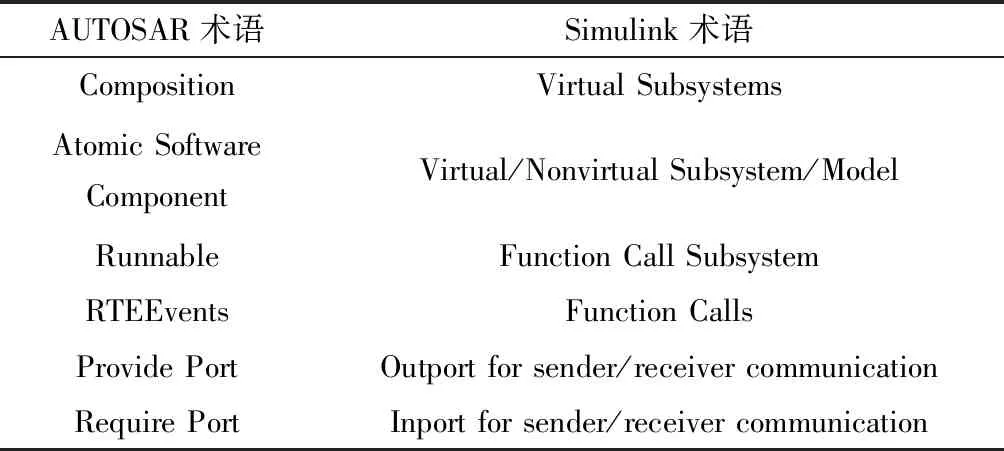
表2 常用术语对应关系
各SWC在将SWC封装到部件的情况下则只能用虚拟子系统表示,SWC在Simulink模型中在配置SWC端口为服务器操作的情况下只能用模型表示[3]。
(1)在Simulink中运行实体Runnable的实现
本文以转向灯应用组件为例,介绍SWC逻辑功能的实现细节(在Simulink中),在Simulink中导入系统描述文件(由ORIENTAIS生成)后,需对应用组件SWC端口做出相应的修改,具体的层次化实现结构如图2所示。转向灯应用组件的内部实现细节会对外屏蔽,输入口和输出口的预留个数分别为7个、3个,各SWC的首个端口均需预留给RTE触发事件,运行时的环境(RTE)触发事件控制信号连接其中前2个输入口,内部包含的2个由状态图实现的Runnable公用两个输入端口信号(GetMincycle和GetFlashFrm),转向灯逻辑状态如图2所示。
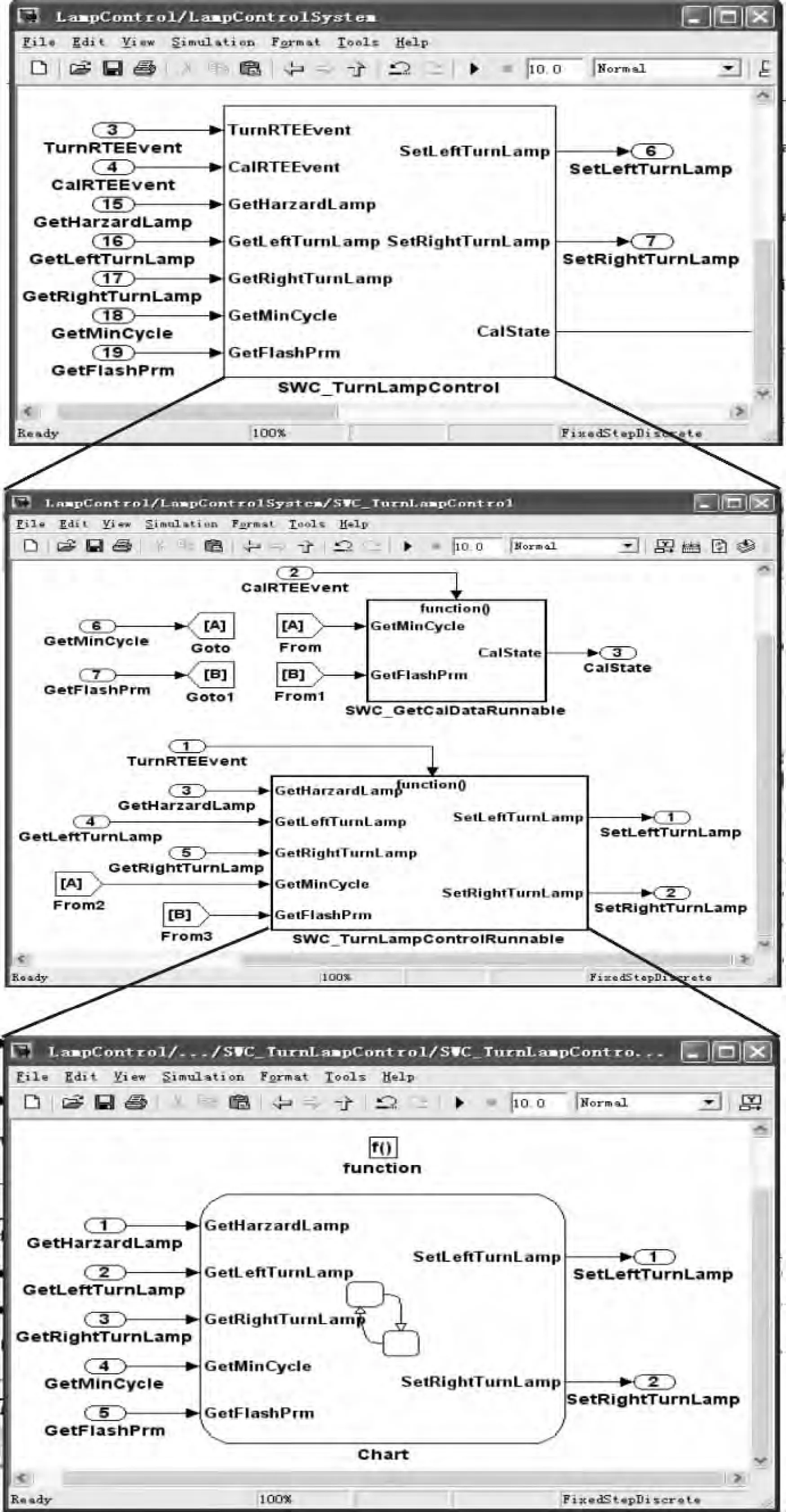
图2 SWC的层次化实现结构
(2)Simulink仿真
在设计好SWC逻辑功能的基础上,需在部件(composition)中封装5个SWC,封装组件系统结构的提供由Composition负责,SWC和VFB间的通信不受影响,各Runnable RTE触发事件的提供由Function Call Generator和Event Chart共同负责,各Runnable的RTE触发事件相互独立,同一Runnable禁止不同的 Runnable共用;实际环境的模拟则由Simulation Environment负责完成,信号输入由其为车灯控制系统(各个车灯皆由开关控制)提供,同时输出信号通过使用示波器观察,采用脉冲发生器(周期为50 s、占空比为20%)代替开关,以便实现对输出信号随输入信号变化情况的较为直观的观察,修改转向灯闪烁频率(通过CAN调试终端)采用以[3 1 4 2 1]为矢量输出值的任意信号发生器(采样周期为40 s)表示,仿真结果如图3所示,观察转向灯状态输出波形可知,其疏密度随着闪烁频率数值的更改而发生了变化,证明转向灯闪烁频率已改变。
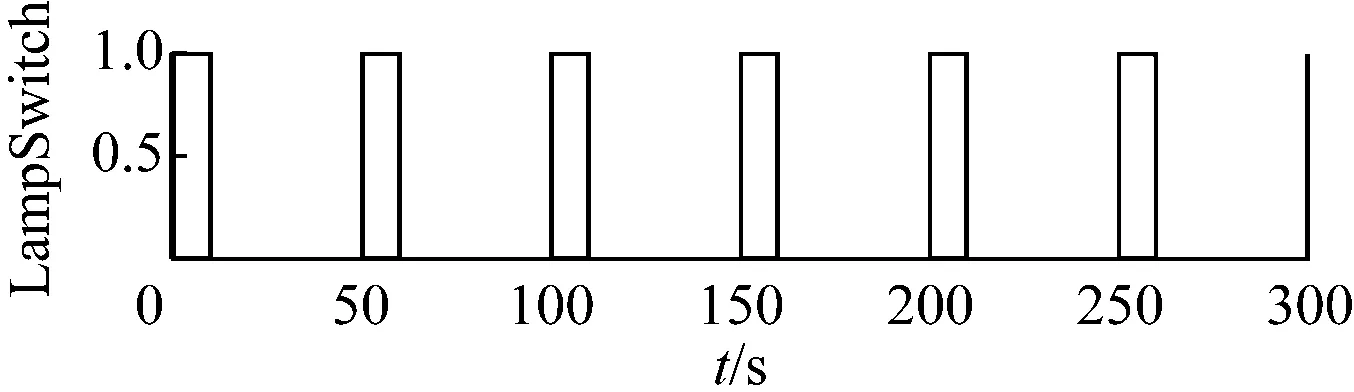
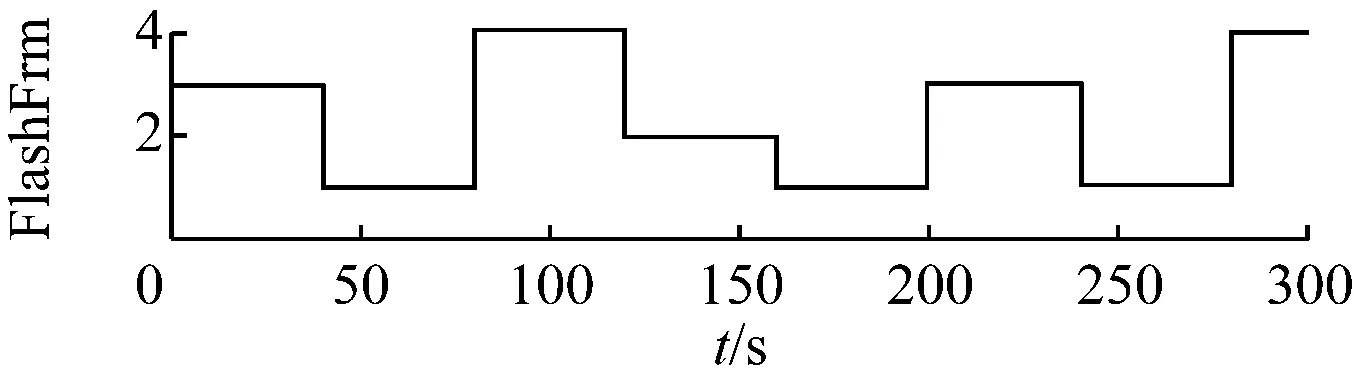
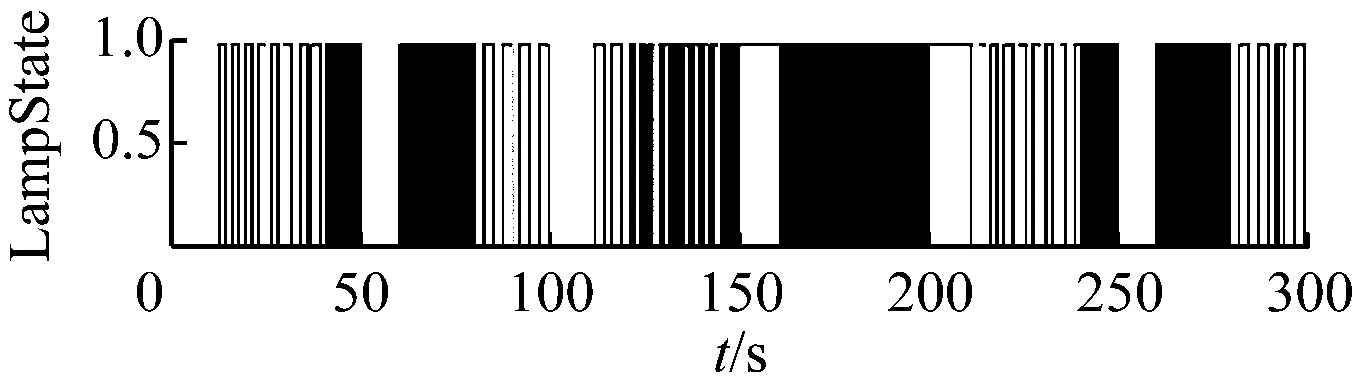
图3 仿真结果
(3)应用代码自动生成
自动生成应用层代码通过使用Matlab/Embedded Coder(作为Matlab和Simulink 的功能补充主要负责为目标系统创建C 代码)工具完成,选择系统目标代码文件为 autosar.tlc以确保为生成的代码与AUTOSAR兼容,汽车车灯控制系统应用代码的生成通过Embedded Coder工具完成,生成的文件主要包括system.arxml(对内部行为特征、SWC的接口、数据类型进行描述),system.c(主要由模型代码、模型初始化及终止操作代码等构成)、system.h(负责模型函数的外部声明,由模型输入、模型数据结构与全局接口等构成)。
(4)底层驱动代码生成
BSW各模块的配置(同SWC设计同步进行但相互分离)过程:先对同底层通信的信号进行处理,为其分配相应的引脚,接下来在ORIENTAIS 中对各模块(包括 I/O,COM,OS,数据链路层,CAN总线及接口,硬件抽象层等)进行配置,在模块完成配置的基础上实现相应配置代码的生成。
2.3 底层与应用层代码整合
系统级设计SWC时只预留了通信接口(不显示内部具体行为),需在ORIENTAIS中导入system.arxml(Embedded Coder的导出文件)完成内部行为信息的提取,应用层SWC 间及其与BSW间的通信通过RTE实现,按照具体功能优先原则完成Runnable到操作系统任务的映射,具体的映射关系如表3所示。
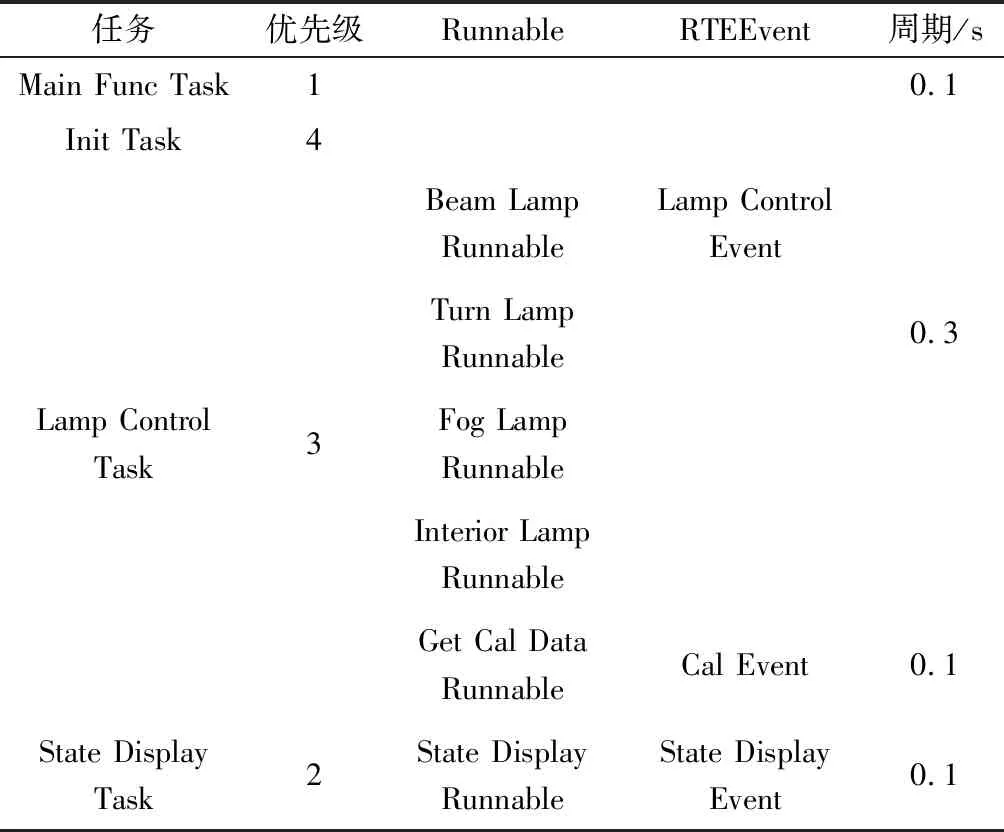
表3 映射关系表
模块的完全初始化通过InitTask完成,对MainFuncTask进行周期性的调度实现通信功能(设定周期要求短),Runnable(与CAN通信)信息对进行不断读取和发送,应用层的SWC通过配置完RTE生成的代码对下层的基础软件进行了封装,并通过OS、COM 等下层基础软件功能的应用完成同上层SWC组件间通信及周期控制,逻辑代码同底层代码最终通过RTE的使用实现无缝连接。
3 实验检测
为检测本文汽车灯控系统自动生成代码的准确性,在试验控制箱中进行了实验,通过对车灯开关进行随机控制,同时对转向灯Flash-Frm(闪烁频率参数)的更改通CAN调试终端完成, f( f=Flash Frm×2×0. 3 s)表示程序中转向灯闪烁频率,具体的实验结果如图4所示。
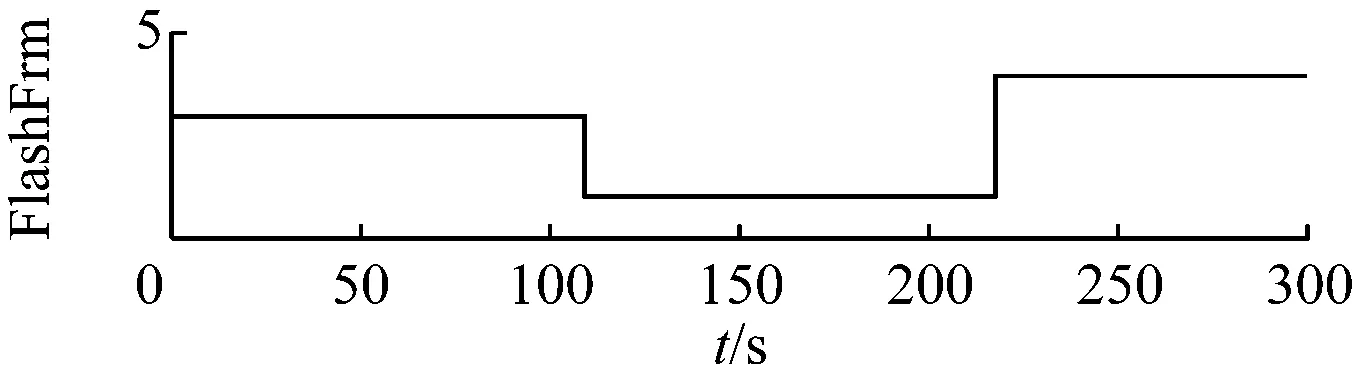
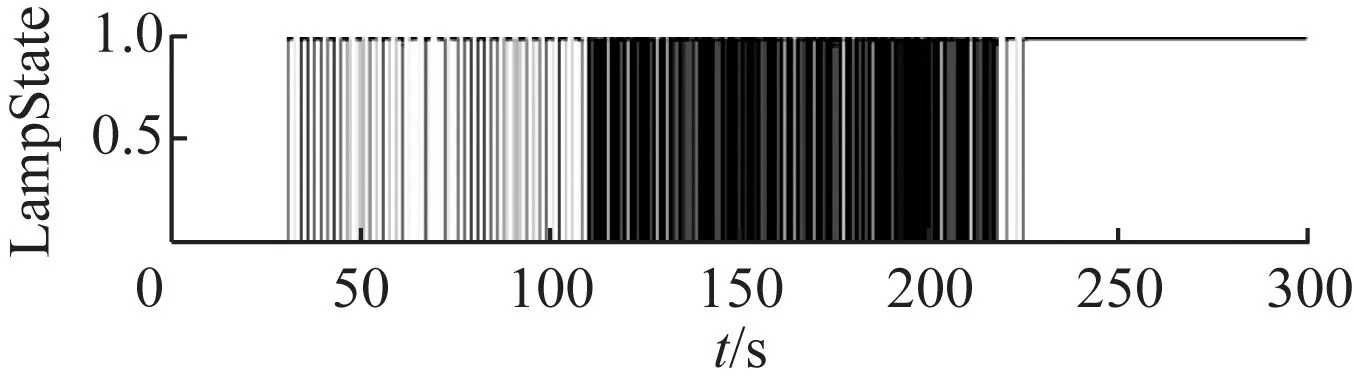
图4 实验结果
由图4可知在改变闪烁频率的过程中(从1.8 s到0.6 s再到2.4s),转向灯状态疏密变化明显,符合肉眼观察到的情况,证明了代码的准确性和可用性,使组件的复用性和软件兼容性得以有效提升,有助于提高不同生产商间产品的互通性。
4 总结
本文主要研究了汽车电控系统代码自动生成技术的开发流程,以汽车车灯控制系统为例,应用ORIENTAIS工具对基础软件和运行环境等进行配置,实现底层驱动和实时交互层代码的生成,应用软件组件的运行实体及应用层逻辑功能则通过Simulink完成开发,运行实体内部逻辑的设计通过运用Stateflow完成,并完成了仿真模型的建立,逻辑层代码采用Em-bedder Coder生成同底层驱动代码、实时交互及逻辑层代码进行融合,实现代码的无缝连接,进行汽车试验控制箱实验,证明了代码的准确性和可用性,使组件的复用性和软件兼容性得以有效提升,有助于缩短了产品开发周期,提高不同生产商间产品的互通性。
