兼顾可用性和可靠性的可视密码最佳方案
2019-04-24乔明秋赵振洲
乔明秋,赵振洲
(北京政法职业学院 信息技术系,北京 102628)
0 引言
SHAMIR A[1]和BLAKELY于1979年分别提出了秘密共享的概念,其主要思想是在n个参与者之间分享一个秘密,k个(或k个以上)参与者可以恢复秘密,而少于k个参与者则无法恢复秘密,所以,秘密共享也称为(k,n)门限方案。可视密码[2-3]是一种依靠人眼解密的秘密共享方法,它是将一个秘密图像加密成n张分存图像,n张分存图像可以打印到胶片上、存入电脑或移动存储器中,且分别由n个人保存。解密时只需k个人(或k个以上)将各自的分存图像叠加,秘密图像就会呈现出来,而少于k个人无法获得秘密图像的一点信息。
传统可视密码方法都是使用像素扩展的方法来进行加密,因此使得分存图像被扩展为秘密图像的好多倍,这样不但造成存储空间的浪费,也使得携带更为不方便。
在传统(k,n)可视密码中,秘密图像中的每个像素都单独处理,由n个人共享,每个共享由m个黑白子像素组成。构建一个n×m布尔矩阵B=[Bij],当且仅当Bij=1时第i个共享者的第j个子像素为黑;当且仅当Bij=0时第i个共享者的第j个子像素为白。当把投影片叠放在一起时,就相当于对于每一行都做了或运算。叠放后图像的灰度值与进行或运算之后的向量V的汉明重量H(V)成正比。使用者利用视觉系统解释灰度值如下,如果H(V)≥d该点像素为黑,如果H(V)≤d-αm该点像素为白。
1 像素不扩展的方案
ITO R[5]等人针对黑白可视密码提出了一种不扩展的(k,n)-threshold可视密码方案,当要分享一个黑(白)点时,便从对应于黑(白)点的基础矩阵中随机选择列,并且将这个列向量的第i行分配给第i个分存图像。由于不论是黑点或白点的基础矩阵,其每一行0与1分布的比例都相同,因此分存图像上每一个像素,会填上黑点或白点的几率也都一样,依次无法从分存图像上猜测到有关秘密图像的信息。而还原图像则靠式(1)来产生对比。在式(1)中,p0和p1分别代表白点和黑点在叠加图像上产生黑点的概率。只要这两个概率值差别够大,人眼便可自动区分叠加图像上黑色与白色的区域。
β=|p0-p1|
(1)
ITO R[5]等所提出的不扩展模型,在分享一个像素时,是完全随机地从基础矩阵中选择行,虽然在整张叠加图像上,能够达到式(1)的对比,但是在小区域上,黑点与白点的分布就可能无法达到式(1)的对比。侯永昌等人提出了像素不扩展之灰阶密码方案[6]及像素不扩展之彩色视觉密码技术[7],其提出m点同时加密的概念,即用m点同时加密来保证分存图像的像素不扩展。
2 举例说明m点加密

因为基础矩阵Bm×n的列数m=2,所以选择秘密图像上的连续两个点为加密对象,称这两点为加密序列,加密方法如下:
(1)当加密序列为两个白点时用矩阵M0加密,保证两个分存图像叠加后,此两点为一黑一白;
(2)当加密序列为两个黑点时用矩阵M1加密,保证两个分存图像叠加后,此两点全黑;
(3)当加密序列为一黑点一白点时,一半用矩阵M0加密,一半用矩阵M1加密。保证两个分存图像叠加后,此两点或者是一黑一白,或者是全黑,且这两种情况各占一半。
通过总结,得到(2,2)可视密码加密规则,其中,e代表秘密图像上已经加密过的黑白各半的加密序列的个数,加密规则如下:
ifemod 2<1
用M1进行加密
else 用M0进行加密
3 兼顾可用性和可靠性的可视密码最佳方案
侯永昌等人的多点加密可以较好地实现像素的不扩展,但是在解密过程中仍然存在秘密图像的对比度不高的问题。结合侯永昌等人的多点加密,在解密的时候使用算法进行重构,方法是在秘密图像的连续m个点中,如果黑色像素H(V)≥d,则对应m个点像素为黑点,否则m个点为白点。
令B0与B1分别代表对应于白点与黑点的n×m基础矩阵,加密序列的长度为m,即一次取秘密图像上的m点来加密,b代表加密序列中的黑点个数(0≤b≤m),eb则代表具有b个黑点的加密序列已加密过的个数,加密程序如下:
(1)令eb=0 forb=1,2,…,m;
(2)由秘密图像中取出尚未加密的加密序列,并计算其黑点个数b;
(3)将基础矩阵B做列向量随机重排,其中矩阵B根据下列规则决定:
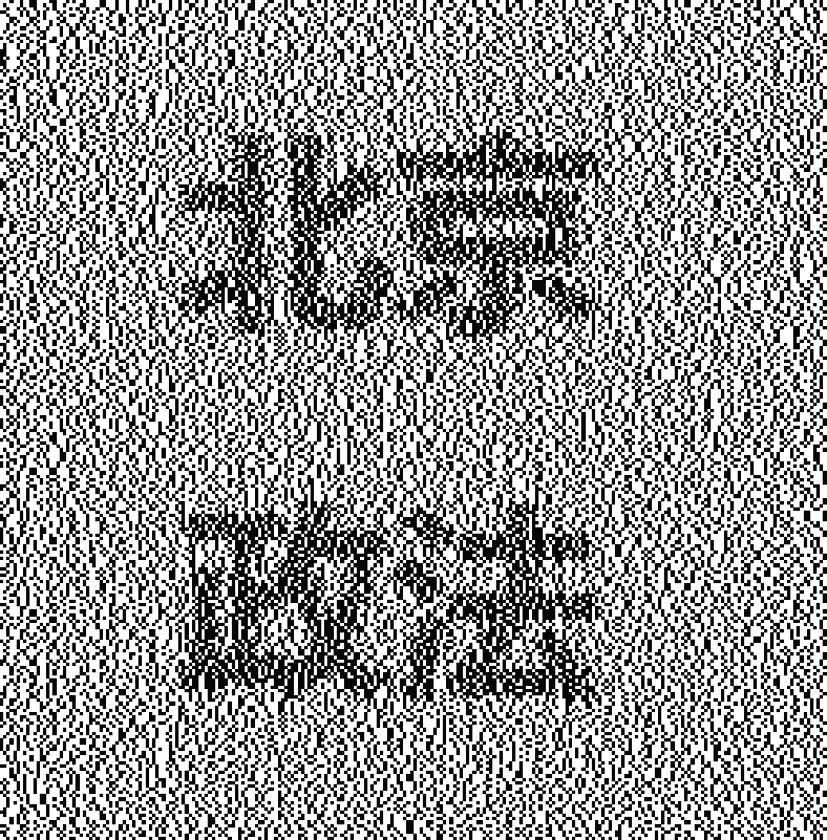
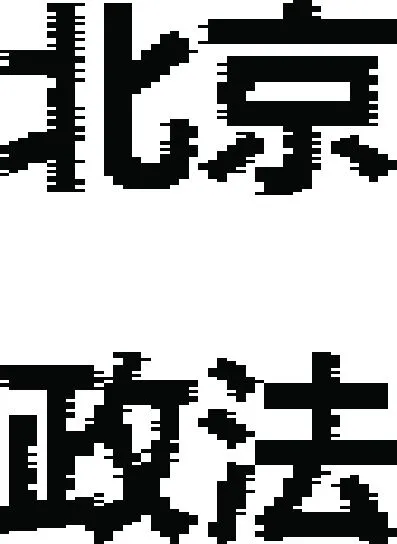
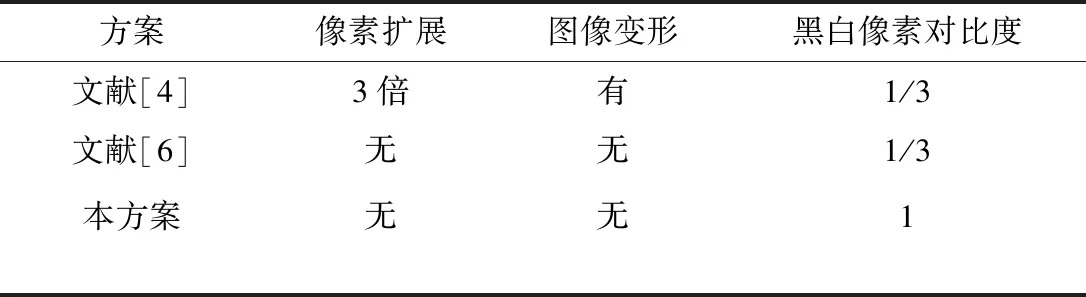
ifebmodm B=B1 elseB=B0 (4)eb=eb+1; (5)重复步骤(2)~(4)直到秘密图像上的所有像素都加密完毕。 解密重构过程如下: ①令C为k个分享者的分存图像叠加后的图像,D为C重构后的图像; ②存在整数p、q,使m=p×q,且|p-q|最小; ③对于B中的m像素,计算黑点个数: forx=p:-1:0 fory=q:-1:0 计算解密图像C中m=p×q个点C((p×i-x),(q×j-y))的黑点个数b end end (4)如果黑点个数大于阈值d,重构图像D对应的m个点为黑点,否则为白点: forx=p:-1:0 fory=q:-1:0 ifb≥d D((p×i-x),(q×j-y))=1; else D((p×i-x),(q×j-y))=0; endif end end (5)重复步骤(3)~(4)直到秘密图像上的所有像素都重构完毕。 以(2,3)可视密码来具体说明本文的方法,(2,3)可视密码的基础矩阵如下: 在传统的可视密码中,对于加密图像逐点加密,如果该点为白点,则将B0进行随机列置换后得到C0,将C0的第一行分给第一个分享者,将C0的第二行分给第二个分享者,将C0的第三行分给第三个分享者;如果该点为黑点,则将B1进行随机列置换后得到C1,将C1的第一行分给第一个分享者,将C1的第二行分给第二个分享者,将C1的第三行分给第三个分享者。这样分享图像和解密图像都将扩大三倍,产生像素扩展。 对于(2,3)可视密码,加密算法为: (1)令eb=0 forb=1,2 (2)由秘密图像中取出尚未加密的加密序列,并计算其黑点个数b. (3)将基础矩阵B做列向量随机重排,其中矩阵B根据下列规则决定: ifebmod 3 B=B1; elseB=B0; (4)eb=eb+1; (5)重复步骤(2)~(4)直到秘密图像上的所有像素都加密完毕。 图1为加密图像,在加密图像上选取连续3个点,如果3个点中有0个黑点,一直使用B0加密;如果3个点中有1个黑点,则第1次使用B1加密,后2次这种情况使用B0加密;如果3个点中有2个黑点,则第2次使用B1加密,后1次这种情况使用B0加密;如果3个点都为黑点,一直使用B1加密。使用上面的方法得到分存图像,如图2所示,分存图像没有像素扩展。将任意两个分存图像进行叠加,得到解密图像C,如图3所示,解密图像没有像素扩展。(本文中所有图像都缩小为原图像的50%。) 图1 加密图像(256×256) 图2 三个分存图像 图3 解密图像 将解密图像利用算法进行重构,重构过程如下: (1)令C为k个分享者的分存图像叠加后的图像,D为将C重构后的图像; (2)存在整数p、q,使3=p×q,且|p-q|最小,则p=1,q=3; (3)对于B中的3像素,计算黑点个数: fory=3:-1:0 计算解密图像C中3个点C(i,(3×j-y))的黑点个数b end (4)如果黑点个数大于阈值2,重构图像D对应的m个点为黑点,否则为白点: fory=3:-1:0 ifb≥2 D(i,(3×j-y))=1; else D(i,(3×j-y))=0; endif end (5)重复步骤(3)~(4)直到解密图像上的所有像素都重构完毕。 C为解密图像,计算C中连续3个点的黑点个数,如果黑点个数大于等于2,则该点为黑点;否则为白点。得到的重构图像如图4所示,重构图像中没有像素扩展,且有更好的视觉对比度。对于(2,3)可视密码,本方案和其他方案的对比如表1所示。从表1中可以看到,本方案像素无扩展,所以图像也不会有变形,且达到最好的黑白像素对比度。 图4 重构图像 方案像素扩展图像变形黑白像素对比度文献[4]3倍有1/3文献[6]无无1/3本方案无无1 本文在兼顾可用性和可靠性的前提下,提出了实现可视密码的最佳方案,在加密时利用m点加密实现了分存图像的像素不扩展,在解密时利用重构得到更优对比度的重构图像,并以(2,3)可视密码为例说明了该方法的优点。该方法虽然避免了像素扩展且对比度很好,但是解密图像黑色像素边缘会稍有模糊,如何设计更优的像素不扩展算法,是今后需要努力的方向。4 兼顾可用性和可靠性的可视密码最佳方案的实例


5 结论