一种分级同步重力卸载试验台
2019-04-23杨国永王洪光
杨国永 王洪光 姜 勇 凌 烈
1.中国科学院沈阳自动化研究所,沈阳,1100162.中国科学院大学,北京,100049
0 引言
跟踪与数据中继卫星是为中低轨道的航天器与航天器之间、航天器与地面站之间提供数据中继、连续跟踪与轨道测控服务的系统[1]。为了跟踪和捕获目标飞行器,中继卫星一般会配备两个大型天线[2],天线的指向精度直接影响目标的捕获与跟踪。卫星天线驱动机构(antenna pointing mechanism,APM)作为调整天线指向的关键部件,其性能高低直接影响中继卫星的性能。为了在卫星发射前对天线驱动机构进行地面测试,需要设计一种地面微重力试验台,用于APM的重力卸载,进行带载的性能测试[3]。
气浮试验台是一种在地面模拟空间中的微重力环境,为目标航天器提供地面测试服务的设备[4-6]。在气浮试验台上可以测试卫星的控制系统,检测卫星的转向、编队飞行等性能[7-8],也可以针对机械臂,对各个连杆进行重力卸载。现有的气浮试验台通常将整个航天器(如整个卫星)作为重力卸载的对象。MIT空间实验室开发了数套三自由度气浮台,用气浮垫进行重力卸载,能够实现水平面上的二维平动和绕竖直轴转动,用于模拟微小卫星之间的编队飞行,进而测试控制算法[9-10]。德国EDAS Astrium公司开发了用于小型绕飞多功能卫星软件开发验证及软硬件联合测试的五自由度气浮仿真系统[11],用气浮垫和球面气浮轴承实现重力卸载。北京控制工程研究所设计了用于天线驱动机构的单轴运动学动力学仿真系统[12]。哈尔滨工业大学卫星技术研究所研制了五自由度气浮仿真试验台[4,13],用气浮垫和球面气浮轴承实现重力卸载。斯坦福大学的航天实验室搭建了一个用于两连杆操作臂的气浮试验台[14],但是只能在二维平面进行重力卸载,在末端采用一个气浮垫支撑。上述各种气浮试验台受限于其结构形式,对飞行器整体进行重力卸载或对平行关节进行重力卸载以实现水平面内运动,不适用于卫星天线驱动机构(两正交关节)的地面重力卸载,因此需要设计一种新型的气浮试验台,对APM在带载时进行两轴的重力卸载,同时能够测试APM的性能。
1 分级同步重力卸载方法
卫星天线驱动机构由两个正交的关节组成, APM的结构见图1,竖直关节和水平关节正交,其中竖直关节的转子和水平关节的定子固定连接。在空间中工作时,竖直关节定子安装在卫星本体上,末端(水平关节转子)安装卫星天线。按照有无相对运动,APM可以分为竖直轴定子、竖直轴转子(包括水平轴定子)、水平轴转子3个组成部分。要实现该机构的重力卸载,同时实现带载的性能测试,需要对这三部分和模拟负载进行重力卸载。

图1 APM结构Fig.1 Structure of APM
可用于重力卸载的气浮元件主要有气浮垫、球面气浮轴承、气浮主轴3种。其中,气浮垫可以提供水平面的两个方向移动和绕竖直轴的转动自由度;球面气浮轴承可以提供定点绕3个互相垂直轴转动的自由度;气浮主轴可以提供绕1个固定轴线转动的自由度。由于竖直轴转动时,会带动水平轴转动,因此水平轴的重力卸载部分需要随水平轴一同转动,这使得水平轴的重力卸载元器件需要在水平方向移动的同时绕竖直方向转动。通过上述对APM的结构分析,实现重力卸载需要提供两个转动自由度。根据各种气浮元件的工作特点和APM以及模拟负载的结构,对竖直轴采用气浮垫进行重力卸载,对于水平轴,由于仅需要提供1个转动自由度,考虑到结构的稳定性,采用气浮主轴进行重力卸载,卸载方法如图2所示。
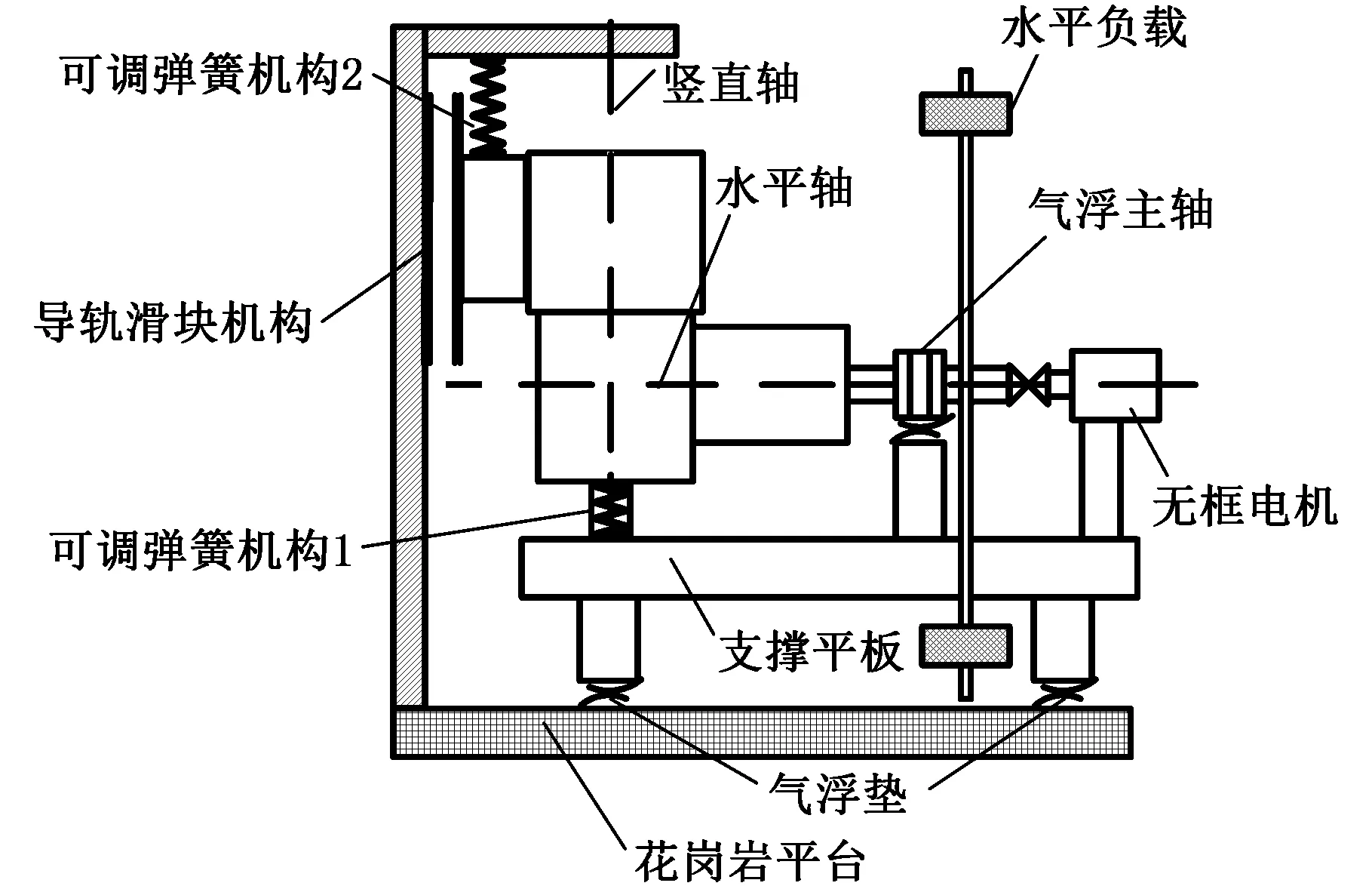
图2 重力卸载方案Fig.2 Scheme of gravity unloading
分级同步重力卸载方法主要是指整个气浮试验台采用两层式的结构形式,上一层采用气浮主轴对水平关节进行重力卸载,下一层采用气浮垫对竖直关节进行重力卸载。由于该结构对两个关节的重力卸载进行了解耦,两个关节可以同时在重力卸载的情况下转动,故称之为分级同步重力卸载方法。具体卸载方法如图3所示。花岗岩平台上安装有龙门支架,APM竖直轴定子通过导轨滑块和可调弹簧机构2连接到龙门支架上。APM水平轴转子连接模拟负载,同时模拟负载和气浮主轴的转轴固定连接,通过气浮主轴的轴套安装在支撑平板上。无框电机用于模拟卫星天线电缆的拖拽力,其转子与模拟负载固定连接,定子安装在支撑平板上,APM的竖直轴转子通过可调弹簧机构1连接到支撑平板上,可调弹簧机构1提供与竖直轴转子重力相等的支撑力。支撑平板下安装有3个气浮垫,支撑在花岗岩平台上。首先通过气浮主轴对第一部分进行重力卸载,APM水平轴转子、气浮主轴的转轴、水平轴负载和无框电机转子同轴安装。气浮试验台工作时,气浮主轴转轴和轴套之间充满高压气体,形成气膜。通过气膜的支撑作用,APM的水平关节可在近似无摩擦的环境下带动第一部分绕水平轴转动,实现该轴的重力卸载。然后通过气浮垫和可调弹簧机构1对竖直轴转子进行重力卸载,通过调整可调弹簧机构1的支撑力,卸载竖直轴转子的重力。为了提供绕竖直轴转动的自由度,在支撑平板下呈三角形布置3个气浮垫,用于支撑第二部分并提供绕竖直轴转动的自由度。由于气路通断时,气浮主轴和气浮垫会存在气膜建立和消失的过程,故在竖直方向产生微小的位移,为了消除该影响,通过导轨滑块和可调弹簧机构2将APM安装在龙门支架上,固定APM竖直轴定子的同时,在小范围内提供了竖直方向的移动自由度。

图3 卸载方法Fig.3 Method of gravity unloading
2 模拟负载设计
为了测试APM的性能,需要设计一个负载结构,以模拟卫星天线的转动惯量以及频率特性,同时考虑到试验台的结构,对模拟负载有质量及转动范围的要求,因此设计模型如下:
(1)
式中,mi为负载质量; ∑mi,h、∑mi,v分别为水平轴和竖直轴的负载质量;ri为mi到转动轴线的距离;θh、θv分别为水平轴和竖直轴的转角范围;Jh、Jv分别为水平轴和竖直轴的转动惯量,为两轴的质量及其分布形式的函数;f为水平轴负载模态基频。
首先确定水平轴模拟负载的结构形式,由于转动范围的限制,负载只能采用哑铃型或三角星型结构,如图4所示。

(a)哑铃型 (b)三角星型图4 负载结构形式Fig.4 Structure of payload
图4中,m是一组配重块的质量,r是配重块质心到水平轴线的距离,l是模拟负载质心到竖直轴的距离,β是负载的转动角度。图4a中,配重块绕竖直轴的转动惯量

(2)
由式(2)可知,该结构下的转动惯量会随着水平轴的转角变化。图4b中,配重块绕竖直轴的转动惯量
(3)
该结构下的转动惯量保持恒定,因此采用三角星型的负载结构可以实现两轴转动惯量的解耦。
考虑到负载频率的约束,对于n自由度的结构,其自由振动的微分方程可表示为

(4)

det(-ω2M+K)=0
(5)
可以求得一组值ω1,ω2,…,ωn,即为结构的固有频率,对应每个固有频率可以求得响应的特征振型。每一阶的频率都是系统刚度和质量矩阵的函数。可以通过调整质量或刚度,反复进行分析计算,使所设计的结构达到给定的频率。
最后对结构进行优化,可进一步减小结构的变形量和应力集中,结果如图5和图6所示,图5所示结构的最大变形量(图7)在下方两组配重块处,为116 mm,图6所示结构的最大变形量(图8)在下方两组配重块连杆中间处,为29 mm。
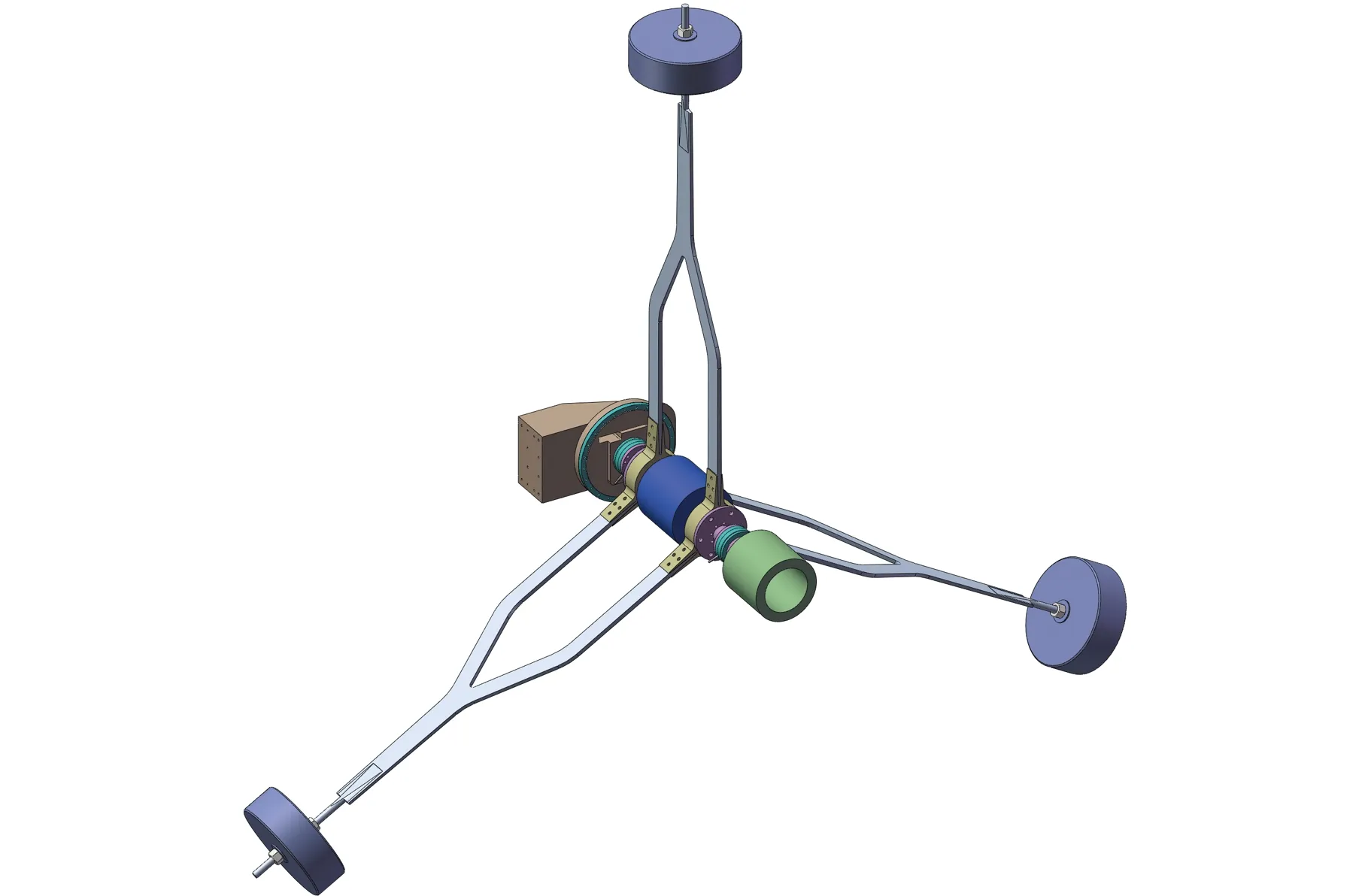
图5 负载结构1Fig.5 Structure of payload 1
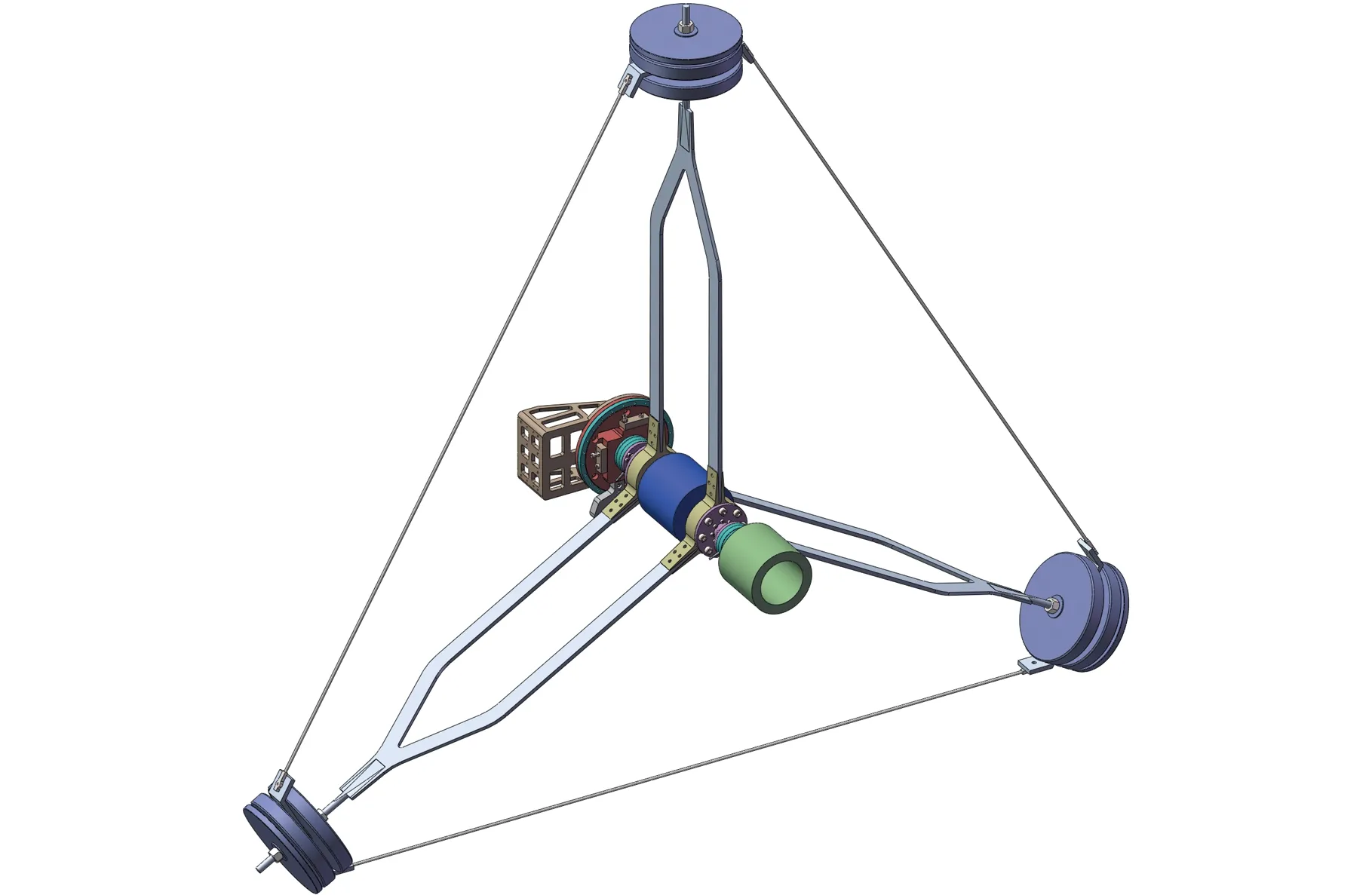
图6 负载结构2Fig.6 Structure of payload 2

图7 负载结构1变形量Fig.7 Deformation of structure 1
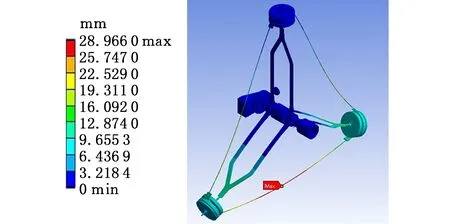
图8 负载结构2变形量Fig.8 Deformation of structure 2
通过更换不同尺寸的砝码,能保证负载的转动惯量在一定范围内可调并始终保持频率在给定范围内,如图9所示,可看出,绕水平轴和竖直轴的转动惯量随砝码厚度的增大逐渐增大,频率随砝码厚度的增大逐渐减小。
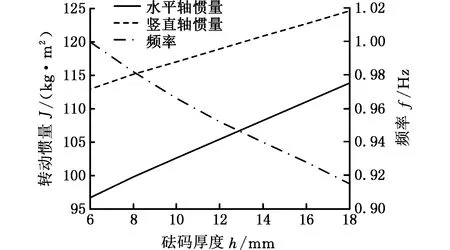
图9 频率与转动惯量变化Fig.9 Relation between frequency andmoment of inertia
根据上述分析,最后对试验台进行了详细设计(图10),并据此搭建了气浮试验台。
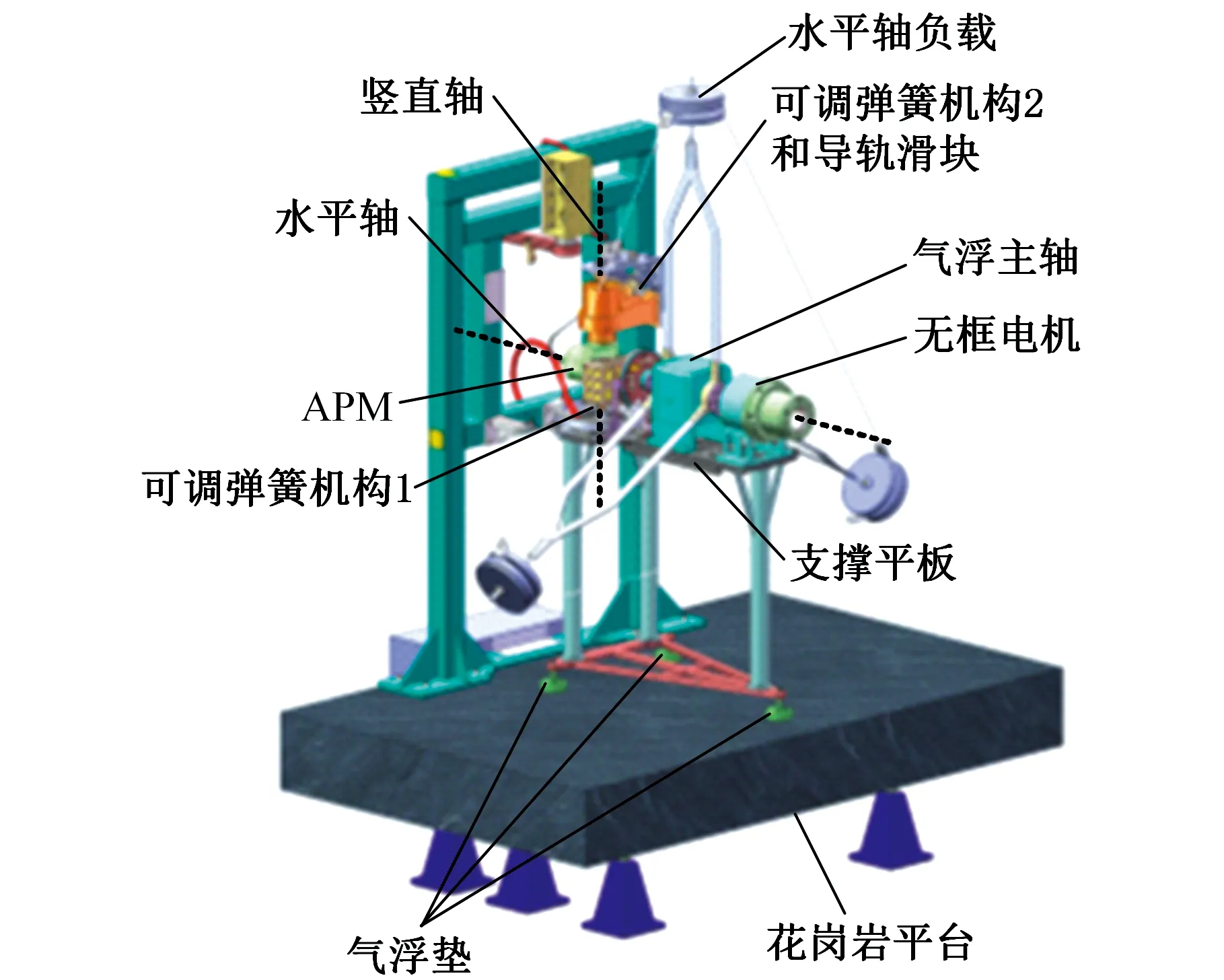
图10 气浮试验台结构Fig.10 Structure of air bearing facility
3 仿真分析
为了对上述重力卸载方法有效性进行验证,对该试验台的三维模型进行了仿真分析,通过与空间无重力环境中的模型进行对比,验证该卸载方法的有效性。
图11 气浮试验台仿真Fig.11 Air bearing facility simulation
将图10所示气浮试验台的三维模型进行简化处理,去掉部分测试零部件,导入到ADAMS中进行仿真分析,如图11所示。对所有零部件赋予相对应的材料属性,由于模拟负载的频率较低,为了真实反映APM的驱动特性,对模拟负载的支架和拉线进行了柔性化处理,将其三维模型导入到ANSYS中,划分网格后生成MNF模态中性文件,导入到ADAMS模型中进行装配。在模型中施加了正常的重力,g=9.8 m/s2,APM的两个关节驱动负载转动,两个关节均采用相同的驱动角速度,得到APM两个关节的力和力矩曲线,如图12~图15所示。
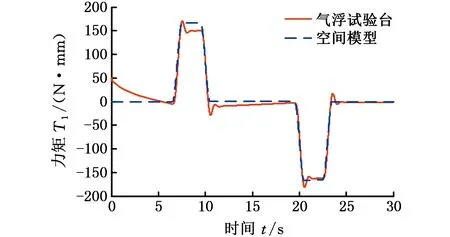
图12 水平关节力矩Fig.12 Torque of horizontal joint
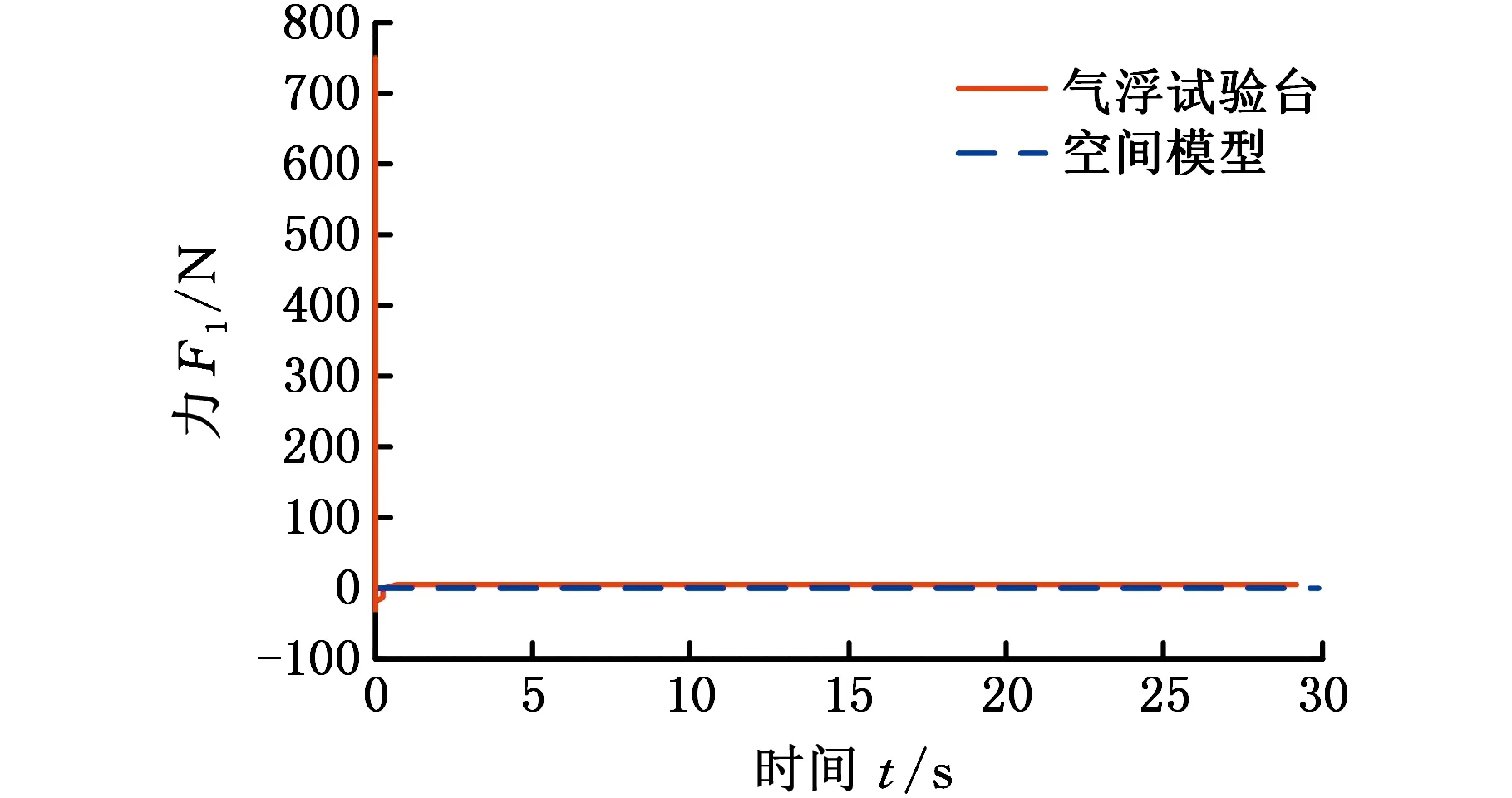
图13 水平关节受力Fig.13 Force of horizontal joint

图14 竖直关节力矩Fig.14 Torque of vertical joint
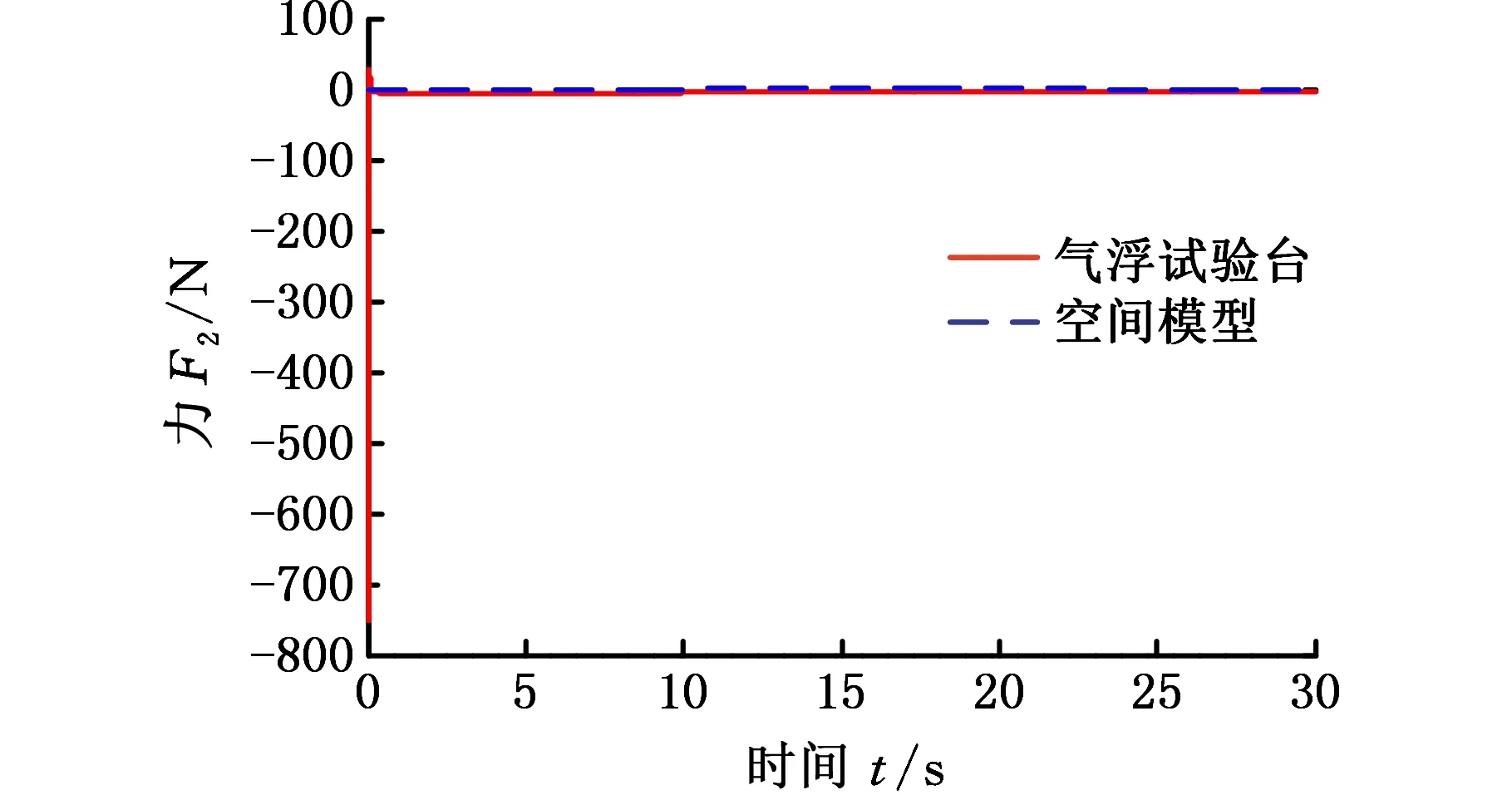
图15 竖直关节受力Fig.15 Force of vertical joint
关节的角速度从0开始,增加到0.3(°)/s,经过一段时间的恒速转动,再减速为0。相对应的角加速度函数在ADAMS中表示为:step(time,6.5,0,7.5,0.1d)+step(time,9.5,0,10.5,-0.1d)+step(time,19.5,0,20.5,-0.1d)+step(time,22.5,0,23.5,0.1d)。
气浮试验台上APM水平轴的驱动力矩与在空间环境中的驱动力矩变化趋势一致,但是在水平关节的加速和减速阶段,由于水平轴的负载在切向的频率较低,导致刚度较低,因此水平关节的驱动力矩在加速和减速阶段存在波动。气浮试验台上的水平关节力矩存在一个偏移,该偏移主要是由零部件误差导致的,水平轴负载不能达到绝对的平衡,会在水平关节上存在额外的力矩,使得水平轴的驱动力矩存在整体偏移。
气浮试验台上APM竖直关节的驱动力矩与在空间环境中的驱动力矩几乎完全一致,除了在初始化阶段存在一个较大的冲击。该冲击的存在是因为在仿真的开始阶段,由于弹簧力和气浮力的施加和模型精度的问题,需要有一个建立平衡的过程,在这个过程中由于气浮力的冲击产生了APM竖直关节驱动力矩的冲击。
对于水平关节和竖直关节的受力,以在铅垂方向的分力作为反映重力卸载有效性的指标,因为在地面重力场中,重力对APM驱动力矩的影响主要反映在竖直分力方向。水平关节的受力在竖直方向的分力保持为0。在气浮试验台上,水平关节竖直方向的分力在初始阶段有冲击,这是因为在初始过程中开始施加气浮卸载力和可调弹簧机构1和2的弹簧力,由于零件的建模误差,系统需要一个短暂的过程建立平衡状态。同理,竖直关节在竖直方向的分力在气浮试验台上初始阶段存在冲击,原因与前述水平关节受力相同。
4 试验台测试
根据所设计的三维模型,搭建了试验台(图16),并对其卸载精度进行测试。在两个轴转动过程中读取力矩传感器数值可得到两个轴的力矩,与理论计算的数值比较,即可得到试验台的重力卸载精度。水平关节和竖直关节分别按照静止—加速—匀速—减速—静止的过程运动,加速度为±0.1°/s2。测试结果如图17和图18所示。
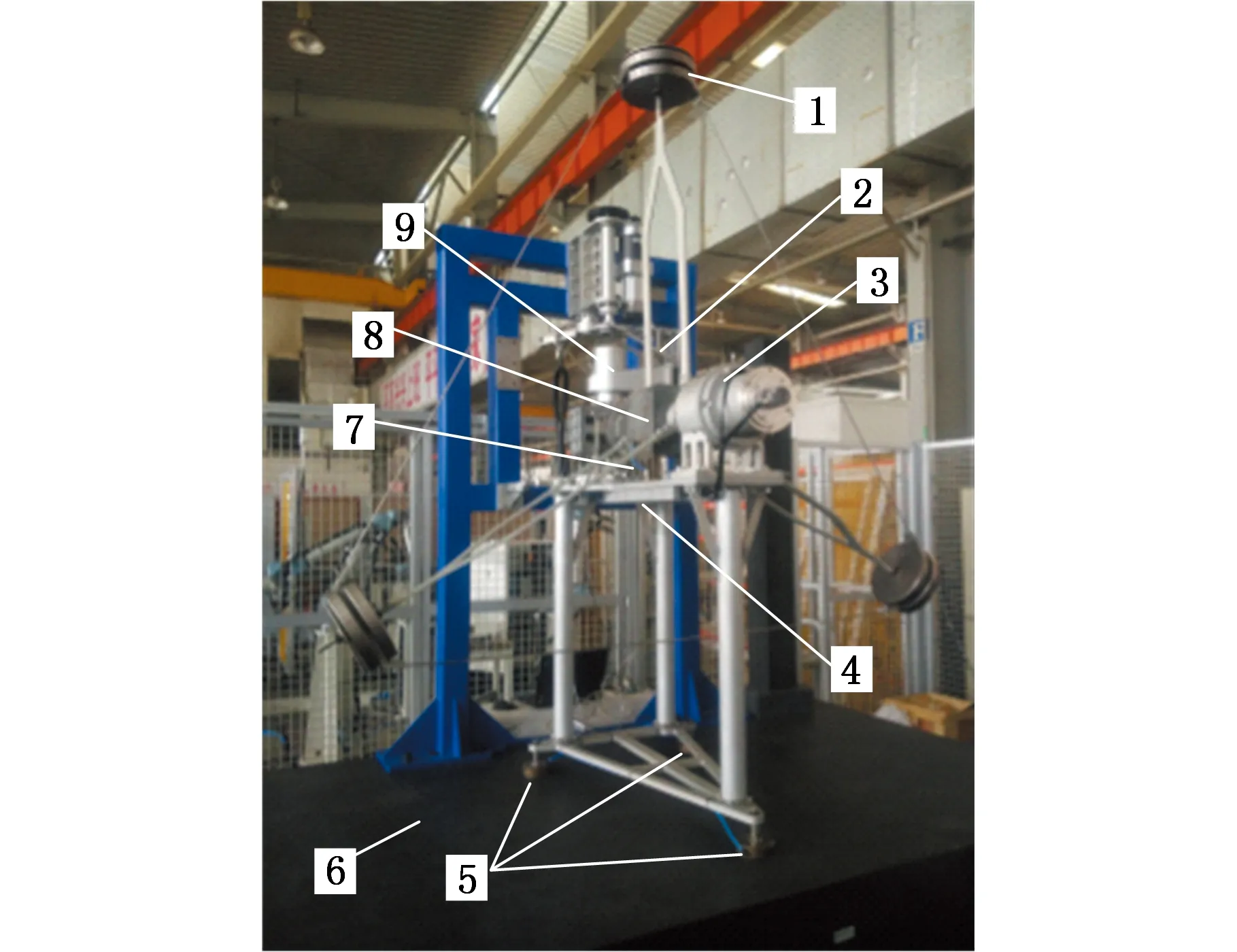
1.水平轴负载 2.可调弹簧机构2和导轨滑块 3.无框电机 4.支撑平板 5.气浮垫 6.花岗岩平台 7.可调弹簧机构1 8.气浮主轴 9.APM图16 气浮试验台Fig.16 Air bearing facility
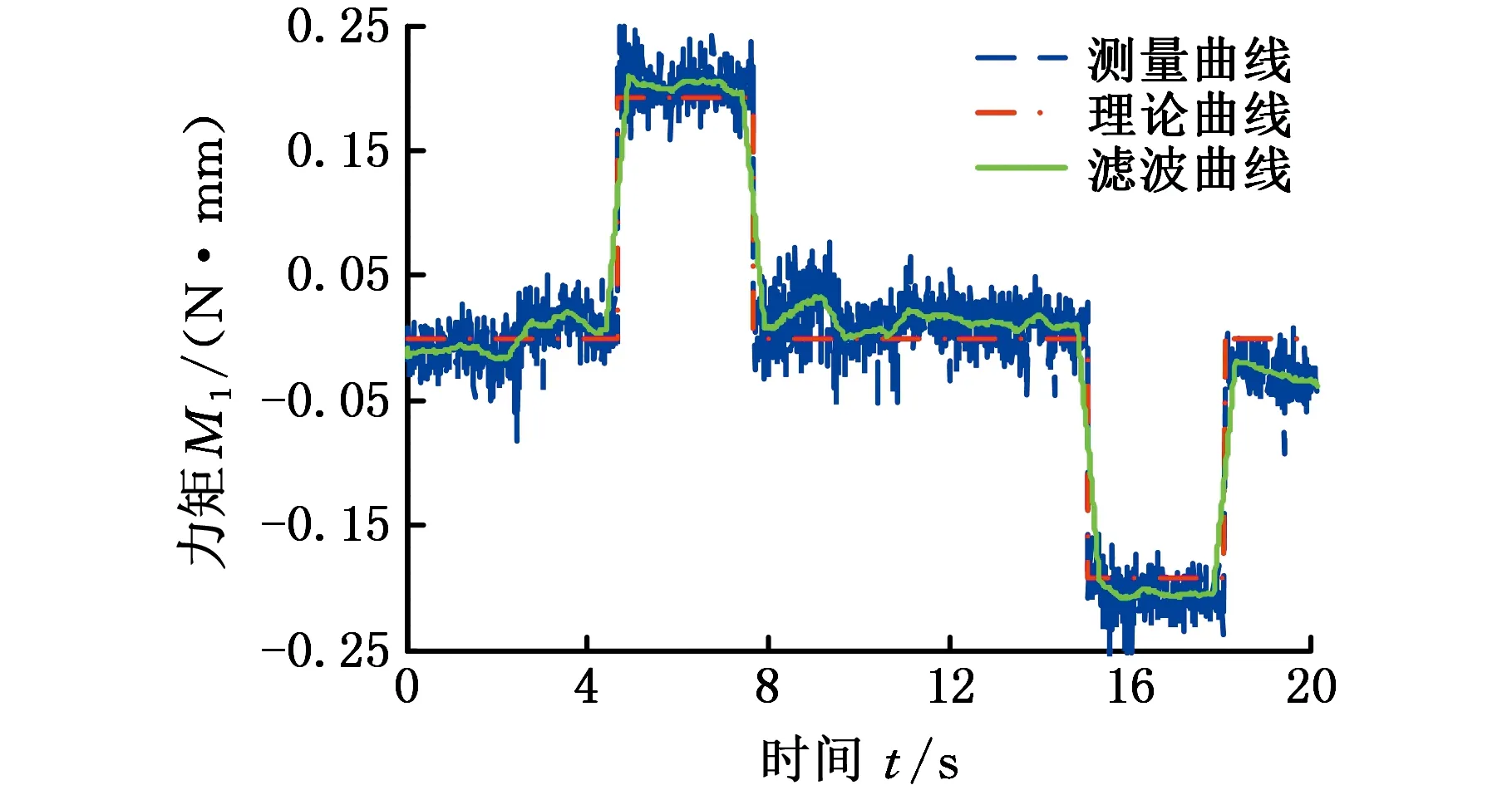
图17 竖直轴力矩Fig.17 Torque of vertical joint
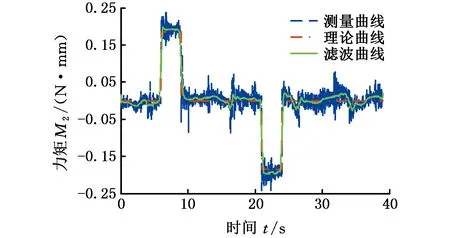
图18 水平轴力矩Fig.18 Torque of horizontal joint
两个关节的力矩在加速减速阶段读取的力矩值和理论值之间存在一定的偏差。测得的力矩经过滤波处理后,与理论值比较,可得重力卸载精度为90%。理论上气浮法可以得到90%以上的重力卸载精度[15],但是由于加工和安装调整过程中存在不可避免的误差,因此上述测试得到的重力卸载精度是合理的。
5 结论
通过对卫星天线驱动机构的结构特点和重力卸载要求的分析,提出了一种分级同步重力卸载方法,用于两个正交关节的重力卸载。采用气浮垫和气浮主轴的组合进行重力卸载,气浮试验台为两层式的结构,分别提供两个轴的转动自由度。通过对不同负载结构形式的对比分析,选择三角星型布置配重块的结构形式,实现了相对于天线驱动机构两轴转动惯量的解耦,对负载结构的优化满足了结构的频率要求。测试结果表明,试验台可达到90%的重力卸载精度,验证了所提出的分级同步重力卸载方法和所设计的气浮试验台的有效性。
