基于交通信号拥塞控制的智能交通系统研究
2019-04-23
(陕西国际商贸学院 信息工程学院,西安 712046)
0 引言
在现代生活中,交通问题成为了公民日常生活不得不面对的困难,如交通拥堵、交通堵塞、交通事故、车辆的碰撞、违反交通信号灯等问题常影响着人们的日常生活。据研究,高容量的车辆、基础设施不足和不合理分布的开发是增加交通堵塞的主要原因。造成交通拥堵的主要原因是由于人口和经济的发展造成的车辆数量过多,交通堵塞是道路网络在使用增加时发生的一种状况,其特征是速度变慢、交通时间变长、车辆排队增多。最常见的例子是车辆实际使用道路,当交通需求大到车辆之间的相互作用减慢了交通流的速度时,就会造成一定程度的交通堵塞;当车辆完全停车一段时间时,这通常被称为交通堵塞,交通信号或交叉口发生碰撞是重要的道路问题[1-4]。本文旨在根据城市面临的道路交通问题,设计一种交通信号灯智能化控制策略,解决城市交通拥塞等问题,实现智能化交通应用。
国际公路联合会(IRF)资料记载,交通控制系统交通灯控制系统于1868年在伦敦安装。自1868年以来,它已经进行了微小的主要/次要变化,但其仍然不是动态的,因为它的静态行为无法处理动态业务的需求。交通管制在生活中起着重要的作用,为解决交通问题,相关学者及进行了大量的研究,需要相关有效的管理技术实现智能化控制。在交通环境中,交通标志识别(Traffic Sign Recognition,TSR)用于调节交通标志,警告驾驶员,以及命令或禁止某些动作。快速实时和强大的自动交通标志检测和识别可以支持和减轻驾驶员的负担,从而显着提高驾驶安全性和舒适性。通常,交通标志为驾驶员提供安全和有效导航的各种信息,因此,交通标志的自动识别对于自动智能驾驶车辆或驾驶员辅助系统是重要的。然而,关于各种自然背景观察条件的交通标志的识别仍然是具有挑战性的任务,基于实时自动视觉的交通灯控制最近引起了许多研究人员的兴趣,因为主要交叉点的交通堵塞频繁,导致浪费时间。因此,给定视频序列,基于视觉的交通灯控制列表的任务:1)分析图像序列;2)估计交通拥堵;3)预测下一个交通灯间隔。研究人员可以关注这些任务中的一个或多个,他们也可以选择不同的交通结构测量方法,或者增加措施,对基于视觉的交通灯控制进行更全面的审查。
1 系统设计
基于交通信号拥塞控制的智能交通系统以实现智能化交通控制为目标,以多种传感设备(RFID、摄像机等)作为信息采集手段,采用无线接入的方式上传服务端,并通过智能控制算法计算获取各信号灯的信号输出结果,完成智能化交通流量控制。本节主要对硬件组成、系统总体架构以及具体测量策略进行了介绍。
1.1 研究动机
以下是这种智能交通系统的一些动机[5-6]。
1.减少交通拥堵;
2.避免交通信号违规;
3.遵守相关交规纪律;
4.减少交警的工作量。
5.在RFID阅读器和标签之间建立安全连接。
6.减少道路交通事故。
1.2 硬件组成
在该系统中,使用的是ATmega328 8位AVR微控制器。它是一款基于AVR增强型RISC架构的低功耗CMOS 8位微控制器。通过在单个时钟周期内执行强大的指令,ATmega328实现了接近1MIPS/MHz的吞吐量。该配置使系统能够优化设备的功耗与处理速度。ATmega328/P具有以下特性:32K字节的系统内可编程闪存,具有读写能力,1K字节EEPROM,2K字节SRAM,23条通用I/O线,32个通用工作寄存器,实时计数器(RTC),3个灵活的定时器/计数器,1个串行可编程USART,1个字节的2线串行接口(I2C),6通道10位ADC(8通道TQFP和QFN / MLF封装),可编程看门狗定时器,内置振荡器,SPI串行端口和6种软件可选择的省电模式,以下是微控制器的示意如图1所示。
ATmega328微控制器的引脚配置图,如图2所示。
1.3 系统架构
在系统架构设计中,摄像机位于信号的顶部,以便清晰地看到信号特定侧的交通状况,从而捕获图像并分析该特定侧的交通并获得车辆数量的计数,通过该计数,将确定该特定侧的密度并提供相应的信号,系统组成架构图[7-10],如图3所示。
1.4 车辆密度测量介绍
智能交通信号灯控制策略的研究的主要算法实现是以车辆密度测量为主,测量算法如图4所示。
(1) 系统图片来源
在该系统中,源图像是RGB图像,其可以由用户给出以获得轮廓图像和输出屏幕中的车辆计数,如图5所示。
(2) 灰度图像
灰度图像可用于以黑白格式显示对象。在此系统中,输出将仅在获取源图像后显示灰度图像,因为源图像仅转换为灰度图像,如图6所示。

图1 微控制器板

图2 引脚配置
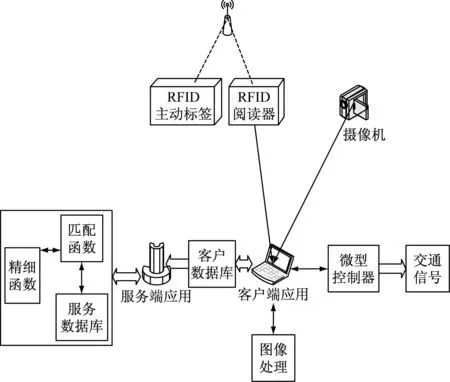
图3 系统架构图
(3) 阈值图像
阈值图像亮度或灰度图像的对比度,在该系统中,可将灰度图像转换为阈值图像,如图7所示。
(4) 图象检测
Canny图像是一种边缘检测图像,能够对物体边缘进行轮廓处理,它可以帮助充分找到识别对象。阈值图像转换为Canny图像结果构图,如图8所示。
(5) 图像腐蚀
腐蚀图像也像图像检测一样,它可以用来找到暗线的边缘。在该系统中,车辆的边缘被黑线探测到,在将Canny图像转化为腐蚀图像之前,Canny图像将被破坏,如图9所示。

图4 测量算法

图5 图像来源图

图6 图像灰度处理图

图7 阈值图像处理图
(6) 图像轮廓
在显示车辆计数和输出画面之前,将腐蚀图像转换为等高线图像,该图片是找到车辆计数和输出屏幕的最后一步,如图10所示。
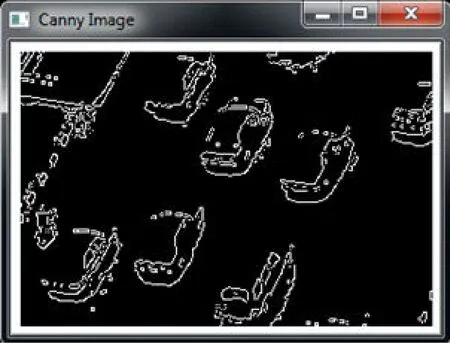
图8 图像检测结果图
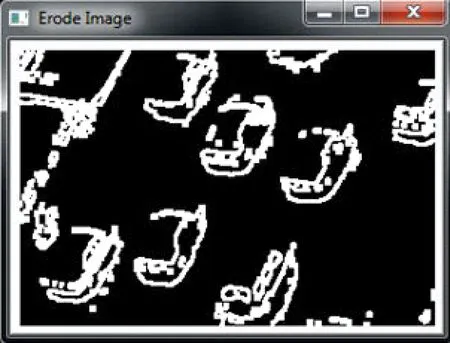
图9 图像腐蚀结果图

图10 图像轮廓处理结果图
(7) 结果输出
该系统通过两种模式进行结果显示,分别描述如下:
1) 输出画面显示输出图像,在这个图像将显示原始的RGB图像,在这个屏幕上,车辆通过“装箱”模式划分出来,以便于计数。
2) 另一个输出屏幕是命令提示符。在此命令提示符将打开时,用户运行本系统,在最后阶段得到输出图像后,命令提示符将显示车辆计数。如图11所示。
2 总结
本文通过在交通信号处捕捉图像并应用图像处理的概念,在车辆上环绕一个圆圈并计算车辆的数量,通过图像处理的方式实现对原始拍摄图片信息的处理。介绍了所用的微控制器的组成及引脚设置,并通过7步进行了图像信息的灰度、轮廓等处理,从而获取最终的车辆数量信息。

图11 结果输出界面
