基于AHP-FCE排爆机器人的排爆综合性能评价*
2019-04-23张继明王古超
张继明,张 军,疏 杨,王古超
(1.安徽理工大学机械工程学院,安徽 淮南 232001;2.宁波公牛电器有限公司,浙江 宁波 315000)
0 引言
排爆机器人属于搬运机器人的一种类型,代替人到不能去或不适宜去的有爆炸危险的环境中,直接在事发现场进行侦察排除和处理爆炸物及其他危险品,也可对持枪持械的恐怖分子实施有效攻击的机器人,是专门用于搜索、探测、处理各种爆炸危险品的防暴机器人[1]。如何准确评估排爆机器人的综合效能对国家排爆装备研发、应用有着重要意义。此方面的研究已有一定成果,例如,王宇凡等建立以抓持能力为核心指标的效能体系,采用层次分析法,对现有的3种排爆机器人的排爆效能进行了综合评估[2-5],赵京教授通过主成分分析方法对机械臂同一构型不同尺度的机械臂结构进行综合性能评价[6]。
本文提出一种适用于排爆机器人综合性能的评价方法,通过AHP-FCE理论模型,将原本的定性问题转化为定量问题,对模型构建和计算后,可以得出排爆机器人的综合性能情况,对以后的设计和选择排爆机器人具有指导意义。
1 AHP-FCE综合评判法
在对一个产品或者一个项目进行评价的过程中,往往会出现一些难以量化的指标,为了解决对于这些定性或者定性与定量相结合的问题,文中采用层次分析法[7,12,14-15,18](AHP)与模糊综合评判法[8,16-17,19-20](FCE)来评价排爆机器人排爆性能的问题。其基本流程[11]如图1所示:
1.1 用AHP法确定指标权重
AHP评价体系,首先主要完成对所分析问题的层次结构的建立,构造判断矩阵并对结构层次排序进行分析决策。本文采用1~9标度法说明因素间的关系,对于判断矩阵A中元素αij可以按表1方法确定。在构造判断矩阵[13]中,要对判断矩阵进行一致性检验并计算权重估计向量。建立一致性指标:
最后求得随机一致性指标:

2 模糊综合评价(FCE)模型
方案中一般无法量化的指标常用一些模糊概念,比如:好、中、差等衡量。模糊评价的一般步骤为:
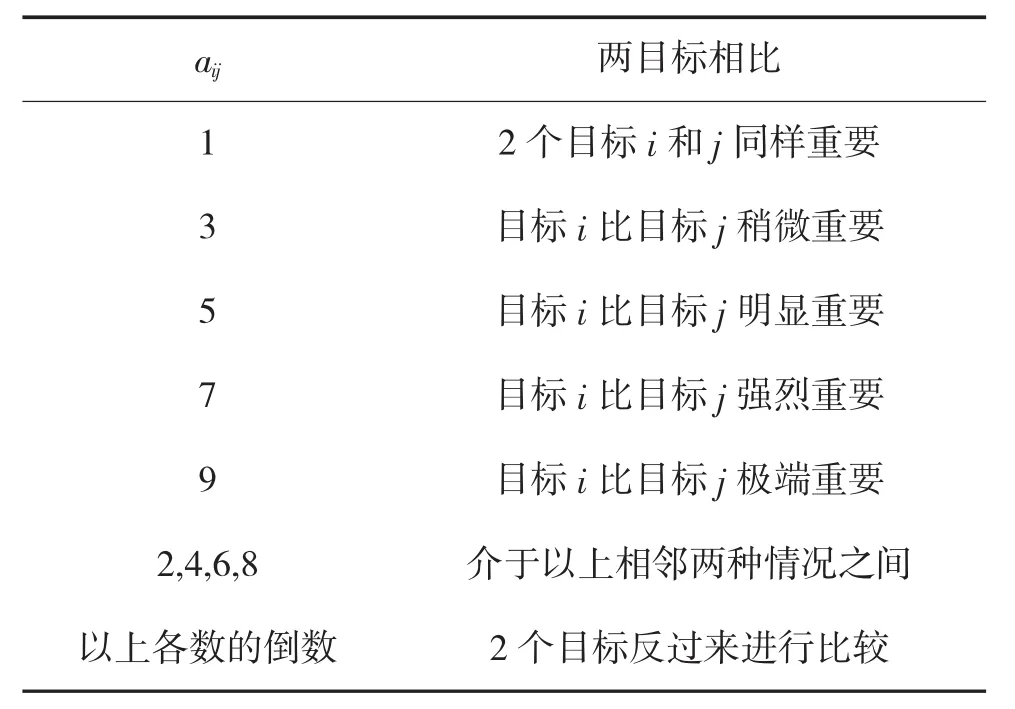
表1 层次分析法判断矩阵取值

表2 平均随机一致性指标
2)确定评语集:评语集是对某一评判因素所作出的好坏优劣的定性结论,设评语集为:;
3)建立模糊评判矩阵:单因素评判矩阵是指以各单因素评判集的隶属度为行组成的矩阵:
4)多级模糊综合评价:模糊综合评价是一个多级逆推的过程,根据因素集的指标权重向量与单因素评判矩阵R合成为矩阵B,且有下式成立
从而可以得出目标层的模糊隶属度。
3 基于AHP-FCE排爆机器人排爆综合性能评价
3.1 综合评价体系模型建立
为评价排爆机器人的综合性能,需要充分考虑到排爆机器人的作战任务和作战环境,由于其工作性质的特殊性,部分指标不能完全量化且无法简单地描述其优劣性,因此,需要构建AHP-FCE综合评价模型解决上述问题。本文选取国家科技部“863”计划的产品JW-902型排爆机器人进行评价。
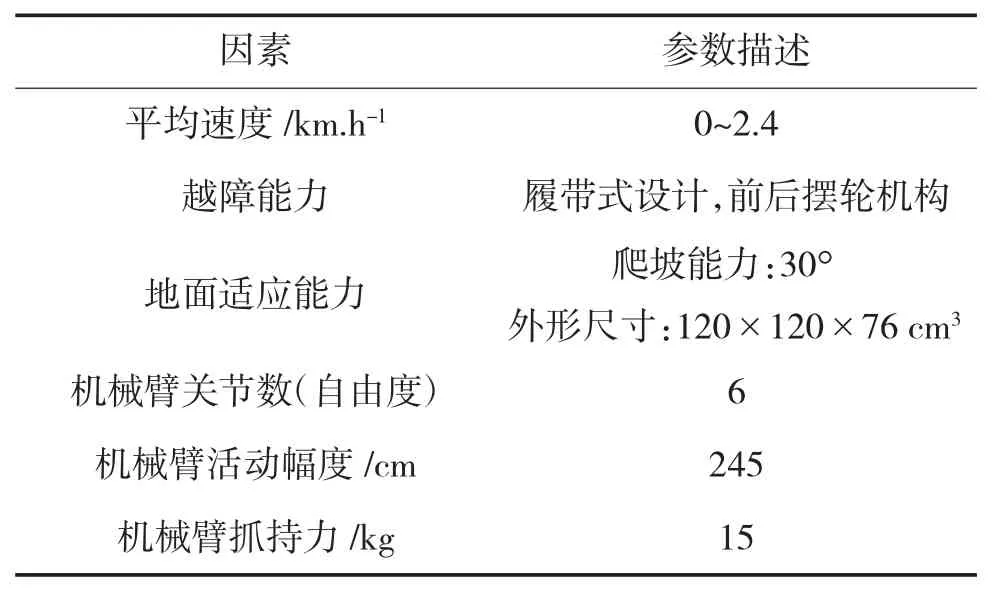
表3 JW-902排爆机器人部分性能参数
综合对JW-902排爆机器人的性能指标研究,遴选归纳出JW-902排爆机器人的性能指标如图2所示,最上层为JW-902排爆机器人排爆综合性能,准则层有4个因素,分别为:运动能力、转移能力、目标识别能力和应用性,最底层也为方案层。
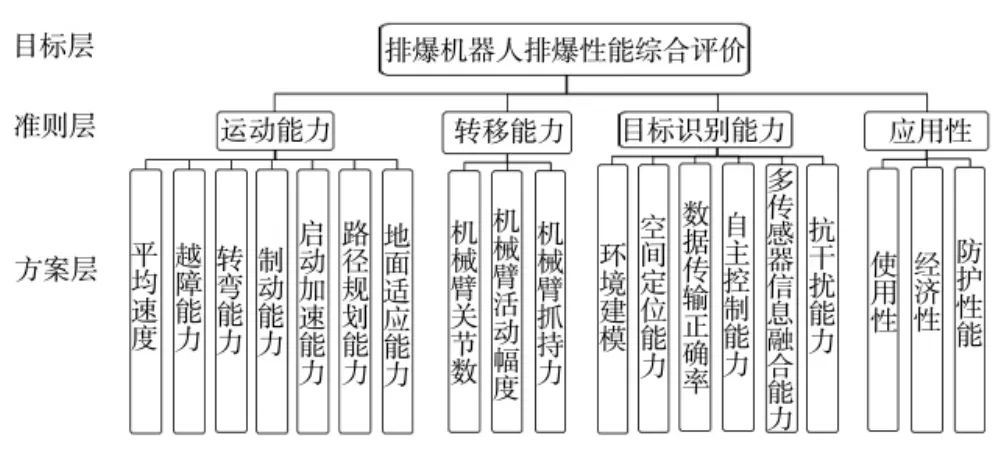
图2 JW-902排爆机器人排爆性能评价的层次结构图
3.1.1 评价指标的含义
运动能力:反映排爆机器人在运动过程中从一个地方移动到另一个地方的快速性、通过性和灵活性,以及与地面的适应性等情况。具体包括:平均速度、越障能力、转弯能力、制动能力、启动加速能力、路径规划能力、地面适应能力。
转移能力:反映排爆机器人在执行排爆任务的过程中,什么样的机械臂能更好地体现转移能力,本文中主要针对机械臂关节数、机械臂活动幅度、机械臂抓持力3个指标进行具体分析,这也可以作为机械臂设计过程中的重要参考指标,且这3个指标所代表的关节数越多,活动幅度越大,抓持力越大,其所代表的转移能力也越好。
目标识别能力:反映排爆机器人在执行排爆任务时,能够快速有效地识别到目标物,然后有效地进行排爆处理的能力。主要有:环境建模、空间定位能力、数据传输正确率、自主控制能力、多传感器信息融合能力、抗干扰能力。
应用性:反映排爆机器人在执行排爆任务过程中,应满足操作方便,性价比高,且具有很强的防护能力。本文主要从使用性、经济性、防护性能等方面具体分析。
3.2 层次分析法指标权重的计算
根据图2的层次结构,经过专家讨论,并结合表1相关指标的度量值,可以分别得到JW-902排爆机器人排爆综合性能在单一准则下,下层对上层指标权重结果,并进行一致性检验,判断矩阵及结果如下:
A-B判断矩阵

B1-C判断矩阵

B2-C判断矩阵

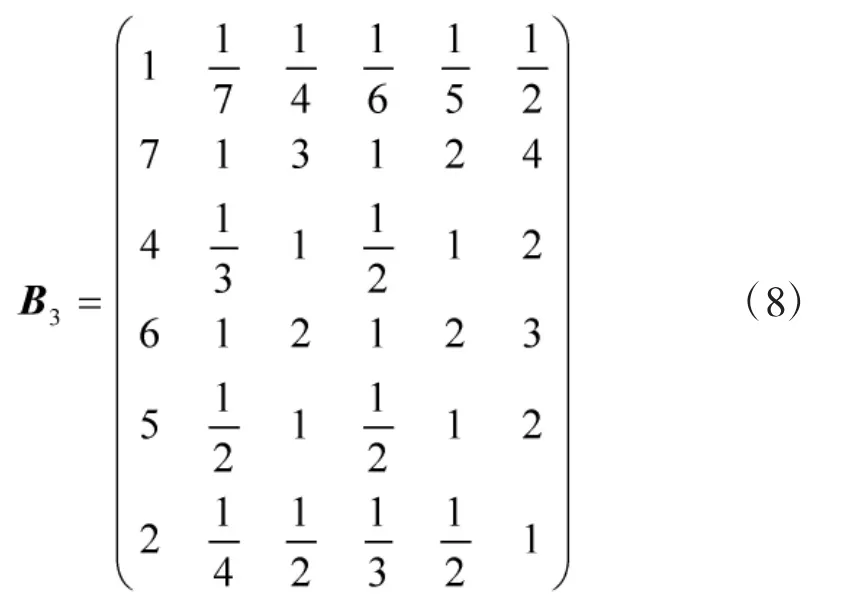
B3-C判断矩阵
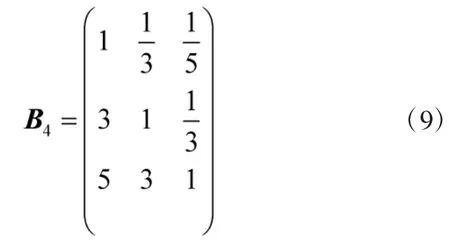
B4-C判断矩阵
各指标权重及其一致性检验结果如表4所示。
由表4可知,指标层对准则层的指标权重结果大小情况,且每个矩阵的值均小于0.10,则一致性检验均通过。
利用上面的评价体系的模型及方法,对JW-902排爆机器人排爆综合性能进行评价,得出各指标的组合权重如表5所示。
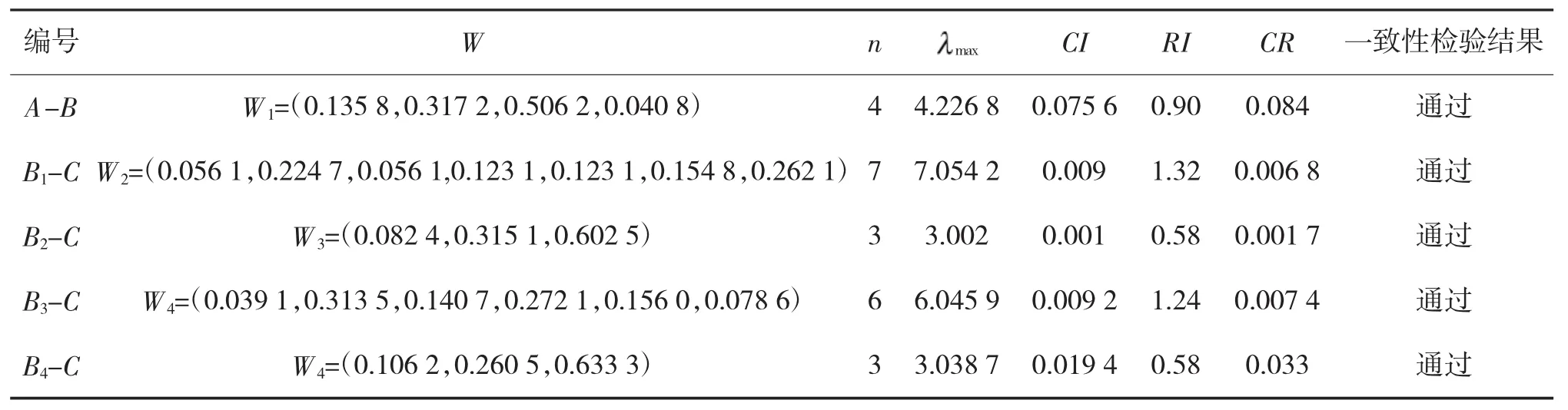
表4 指标权重及其一致性检验
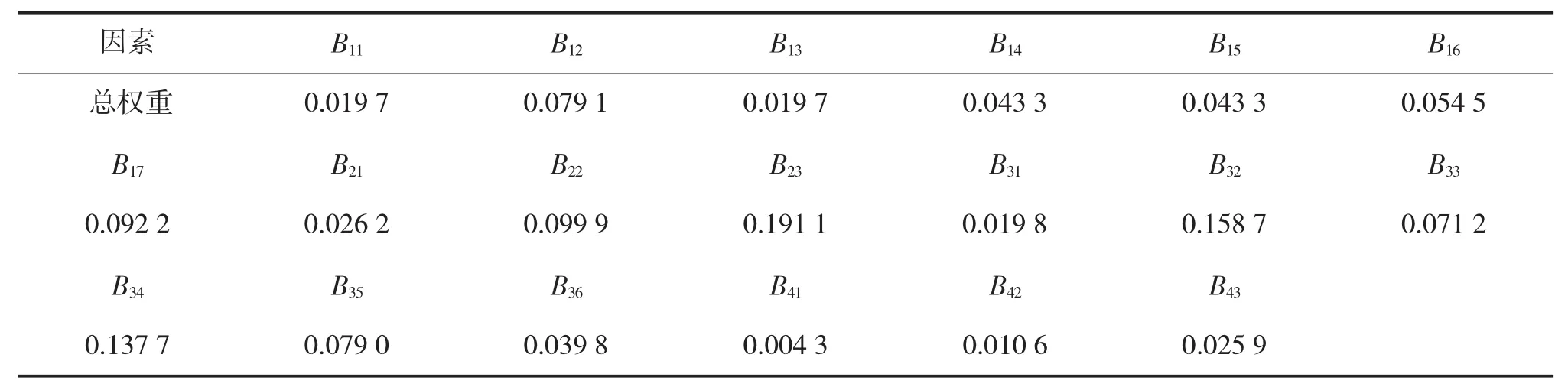
表5 各指标的组合权重
由于总排序随机一致性比例为
3.3 模糊综合评价法
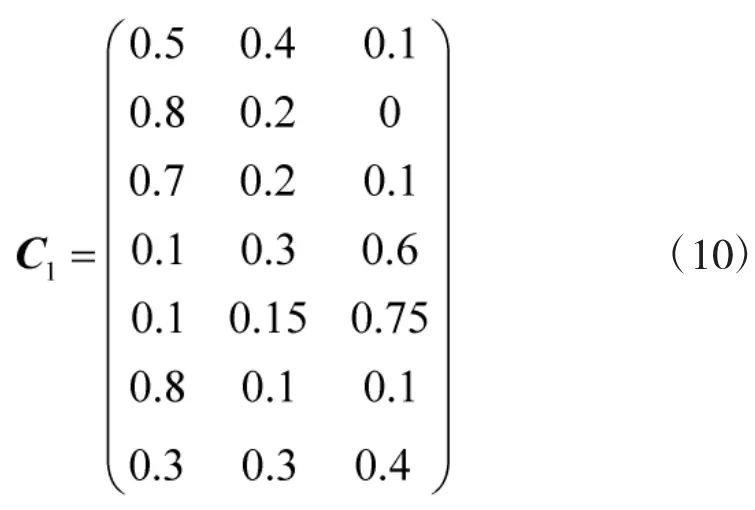
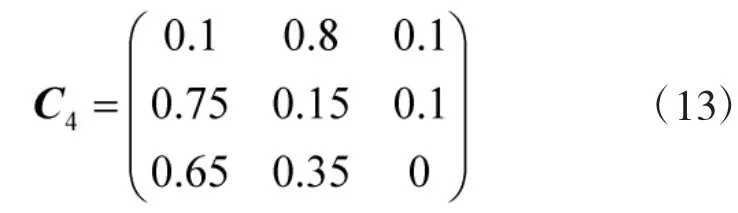
上面已用层次分析法计算出各评价指标的权重分配,然后结合隶属度函数[9]和统计法[10]求得各个评价指标对于评价集的3级等级隶属度,得到对应评价体系的隶属度矩阵:
运动能力
转移能力

目标识别能力

应用性
通过模糊运算,从底层开始,逐层向上作模糊综合评估,将所得的各个因素的模糊隶属度矩阵分别与表4中对应的权重向量相乘,可得到准则层的隶属度矩阵为:

最终可以得出目标层的模糊隶属度:
根据最终的评价结果可以得出,JW-902排爆机器人的排爆综合性能有40.03%的可能属于“好”这一等级,有43.34%的可能归属于“中”这一等级,有16.63%的可能属于“差”这一等级。根据最大隶属度原则,可能性最大为43.34%的属于“中”这一等级为最终的评价结果。
4 结论
运用层次分析法——模糊综合评价法建立完整的JW-902排爆机器人排爆效果的综合评价指标体系,结合主要的因素进行分析,采用层次分析法确定了JW-902排爆机器人的不同因素的权重系数,得到了整体的等级隶属度情况。从得出的隶属度结果可以看出,JW-902排爆机器人的运动能力水平还处于很差的水平,需要进一步开发更好的移动平台,以使机器人的运动性能增强;转移能力相对运动能力有待提高,要想排爆过程安全可靠,JW-902排爆机器人转移危险物的能力也要加强;其目标识别能力较强,这样为及时寻找危险源并销毁带来可能性。最终运用此评价模型得出JW-902型排爆机器人排爆性能只是处于中等水平,这就需要开发出更高性能的排爆机器人来应对现有的各种危险情况。此评价模型使用简单易懂,得出的结果科学可靠。
