磁悬浮轨道交通关键技术及全速度域应用研究
2019-04-22罗世辉邓自刚
徐 飞, 罗世辉, 邓自刚
(西南交通大学 轨道交通国家实验室(筹), 四川 成都 610031)
目前,我国城市轨道交通总里程超过5 000 km,全国铁路营业里程达到12.7万km,其中高铁2.5万km,支撑了国民经济可持续发展。日益完善的轨道交通网络,为旅客出行带来极大便利的同时,也进一步激发了人们的期望。例如追求400 km/h及更高的远程出行速度,更快捷完善的市域轨道交通网络,降低城市轨道交通建设成本,改善轨道交通振动噪声环境等。这些期望和需求,为磁悬浮轨道交通的发展提供机遇。
磁悬浮交通已在中低速(80~120 km/h)和高速(430 km/h)实现了商业运用[1-2],或达到了商业运用的程度[3]。在中速和超高速域,磁悬浮的研究也在持续进行,其中具有较大影响力的研发工作有:西南交通大学高温超导磁悬浮[4-6]和美国太空探索技术公司、Hyperloop One及HTT等公司的超级环电动磁悬浮[7-8];美国磁动力公司的M3电磁磁悬浮[9-10]、磁飞机公司的电动悬浮方案,以及加拿大的电动悬浮方案。由此可见,以磁悬浮交通方式,在全速度域布局未来轨道交通,已成为热点研究方向[11]。我国地域辽阔,人口众多,对轨道交通需求形成的市场优势,有利于促进未来各类交通技术的发展,在中低速和高速域的磁悬浮交通技术已基本具备规模化发展的技术积累[12],在中速和超高速域的研究积累也处于世界前列。
本文从磁悬浮交通的角度对不同速度域进行了划分,分析了社会发展对地面交通速度的诉求,总结对比传统轮轨与磁悬浮交通的最基本特点,研究磁悬浮交通方式在全速度域应用的可行性和亟待解决的关键技术问题。
1 磁悬浮轨道交通速度域划分
交通工具速度域划分与其技术原理密不可分,且随着技术的发展,速度域划分也并非一成不变。
传统轮轨铁路的速度域通常划分为4个等级,即普速铁路(120 km/h以下)、提速铁路(120~160 km/h)、准高速铁路(160~200 km/h)和(包括既有线改造与专线)高速铁路(200~400 km/h)。基于最高速度还有上浮空间的考虑,专线250~400 km/h速度范围基本上可涵盖轮轨铁路全高速区范围[13]。
基于磁悬浮非接触运行的基本原理,其应用速度范围可覆盖从城市轨道交通速度直至数个马赫,本文从磁悬浮列车的角度,将这一宽泛的速度范围定义为全速度域,根据磁悬浮轨道交通的应用和研究现状,可将其划分为以下5个等级:即中低速域、中速域、高速域、超高速域,如果进一步考虑未来磁悬浮应用,还应包括极高速域(或称宇航域)。速度域的分界线是模糊而不是精确的,随着技术的发展,速度域既有可能重叠,也有可能调整。
在中低速域,日本于1974年开始的研发以最高速度300 km/h为目标[14],目前最高商业运用速度在80~120 km/h。西南交通大学及中车株洲电力机车有限公司、中车大连机车车辆有限公司的中低速磁浮设计目标速度已达到160 km/h,研究表明,中低速域的速度潜力有望达到200 km/h。
在高速域,德国、日本的磁悬浮列车工程化速度均达到了500 km/h。中国速度为600 km/h高速磁浮也被列入国家重点研发计划。高速域的划分应当覆盖轮轨高铁与航空间的空白,400~1 000 km/h范围基本上可涵盖磁悬浮轨道交通全高速区范围。
中速域的速度范围为200~400 km/h,介于高速域与中低速域之间的速度区间。
在超高速域,美国的磁浮滑橇在火箭引擎推动下已达到1 019 km/h的速度,其终极目标是从亚音速直到9.1马赫。
在轨道交通应用方面,随着列车速度超过600 km/h,必然要与真空管道概念结合,以减小巨大空气阻力的影响,形成真空管道磁悬浮高速轨道交通。西南交通大学高温超导真空管道磁浮和美国HTT等公司的真空管道磁浮,都把速度1 000 km/h作为基本目标,如果进一步考虑轨道交通速度目标值选定的原则,如优势距离、旅行时间、时间价值、跨线运输、工程投资、未来发展等诸多因素[15],作为公共运输工具,1 000~2 000 km/h速度范围是未来努力的目标。作为非公共交通属性的超级载体,第一宇宙速度可作为其上限。
基于上述磁悬浮交通技术的应用和研究现状,本文将磁悬浮轨道方式速度域进行划分,见表1。
表1全速度域磁悬浮轨道方式的速度域划分km/h

中低速域中速域高速域超高速域宇航域80~200200~400400~1 0001 000~10 000>28 440
2 社会发展对地面交通速度的诉求
每一次工业革命都标志着人类社会文明发展达到了一个新的里程碑,从纪年的尺度清晰地描述了人类科技进步与地面交通速度相辅相成的关系[16],见图1。

十七世纪蒸汽动力机械的发明和应用,诞生了现代轨道交通,之后轨道交通进入了快速发展阶段,牵引能力已能满足大运量集中客货运输需求。
以电气化为代表的第二次工业革命,实现了轨道交通的高速化。1964年日本东海道新干线开通,地面大运量旅行速度突破了200 km/h,1983年、1991年法、德两国相继开行高速列车,速度分别达到270 km/h和250 km/h,较之第一次工业革命时代大约翻了一番。
第三次工业革命,以计算机及信息化为表征之一。一方面传统轨道交通牵引能力显著增长,使我国普遍开行350 km/h高速列车成为现实,且有望将运行速度进一步提升到400 km/h;另一方面,以高速磁悬浮列车为标志,基于材料、电子、信息、控制技术最新发展的新型大运量轨道交通,运行速度已可达到500 km/h,较之第二次工业革命的地面大运量交通速度大约又翻了一番。
进入二十一世纪,迎来了以新能源、人工智能、量子通讯等为特征的第四次工业革命的曙光。可以推断,推升轨道交通速度的诉求不会改变,地面轨道交通速度是否再翻一番,达到1 000 km/h值得期待,磁悬浮轨道交通最有可能去实现这一目标。尽管航空方式已实现了1 000 km/h的旅行速度,但地面高速交通仍有必要,对沿线经济的带动作用和转移航空客流减少高空温室气体排放的影响极为明显[17]。
3 磁悬浮交通基本特点
磁悬浮和轮轨系统各有特点,也有局限性[18-20],在不同速度域可以形成互补。本节就未来面向高速和超高速域,通过2种系统的对比阐述磁悬浮交通的可行性。
3.1 不同磁悬浮方式没有通用性
轮轨铁路历经200多年的发展,无论机车、客车还是货车,遵循相同的基本原理,即利用轮轨滚动接触实现支撑、导向、牵引或制动,线路基本结构简洁通用。
磁悬浮交通系统的工程化研究始于上世纪60年代,已实现商业应用的3种典型磁悬浮轨道交通方式,分别是日本的中低速磁悬浮、低温超导高速磁悬浮和德国的高速磁悬浮,这3个系统实现悬浮支撑、导向和牵引的基本原理不同,线路基本结构也不同。目前还在研究中的多种中速、超高速磁悬浮系统,在基本原理和线路基本结构方面也有很大差别。由此可见,不同速度域的磁悬浮交通甚至同一速度域的磁悬浮交通系统的车辆和线路基本结构缺乏通用性。
3.2 非黏着运行
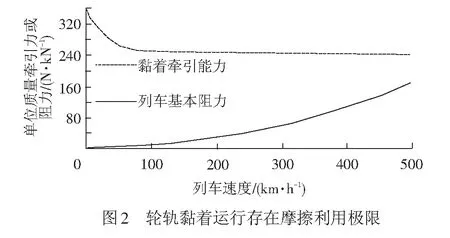
传统铁路依靠轮轨滚动摩擦运行,即所谓黏着运行,摩擦利用程度既决定、也限制了系统牵引能力的发挥。为实现更高速度,必定要求尽可能多地利用列车质量产生摩擦力,最终是列车全部质量都被用于产生摩擦力,所有车轴均为动轴。在这一条件下,列车单位质量基本阻力和基本牵引力曲线见图2[16],曲线最终的交点所对应的就是速度极限。需要特别说明的是,该图仅是大致的结果,反映基本趋势。虽然法国高速列车利用线路下坡道达到了574.8 km/h的最大试验速度,但在平直道上它是无法保持这一速度的。
无论采用什么原理,磁悬浮交通在高速域均不存在机械接触摩擦,突破了摩擦限制,为非黏着运行。日本低温超导电动磁悬浮达到了603 km/h,德国电磁磁悬浮达到了501 km/h,原理上磁悬浮方式可以适应更高的速度。
3.3 非车载动力
高速轮轨列车牵引电机安装在车上,通过车顶受电弓与接触网导线滑动接触将牵引电能从地面传输到列车,接触压力需要合理选择,既能保持接触又能减少磨耗。接触导线张力,列车运行速度和碳滑板接触压力之间的关系,见图3。
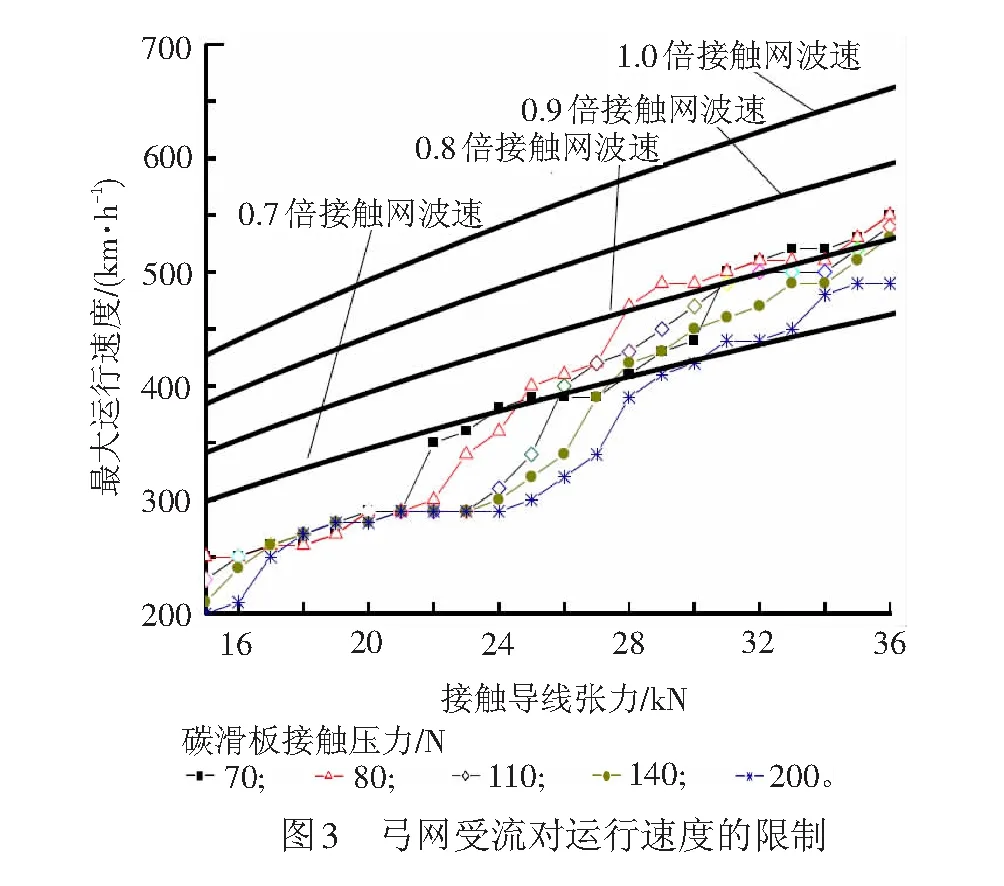
接触网波速越大越有利于保持接触,有标准规定,列车最大运用速度不应超过接触线波速的70%[21]。而接触线的极限波速是导线张力、许用应力、电阻率等因素折衷的结果,列车最大速度也因此受到限制。
中速及以上速度域磁悬浮交通均采用轨道侧长定子直线同步电机牵引,牵引电能不需要从地面传送到列车上,使高速磁悬浮列车的牵引能力、坡道能力不再受到受流限制。
3.4 悬浮分布载荷
我国大部分高铁线路采用了高架桥方式,磁悬浮交通也是如此。除了几何偏差产生的线路随机不平顺,高架结构决定了列车、线路相互之间存在周期性激扰。轮轨高铁列车质量由有限个轮轨刚性接触点承载并传递到线路上,属于集中载荷。无论采用什么原理的磁悬浮,列车的质量都由悬浮均匀地施加于线路,且悬浮具有一定的悬挂特性,属于分布载荷。
传统高铁虽然是集中载荷,但列车属于被动支撑方式,可以采用较大的桥梁挠跨比,有利于降低建设成本。不过在高速时,车轮不圆度、轨道几何不平顺、车桥间周期激扰等因素可能导致动态响应成份很大,增加线路和车辆的维护成本。
从支撑的角度,磁悬浮交通可分为被动支撑和主动支撑两类。被动支撑与传统高铁类似,可采用较大的桥梁挠跨比,且动态响应显著低于轮轨;主动支撑通过列车与轨道间的主动控制,使悬浮间隙保持在额定值,必须有效抑制车-线耦合振动才能保持良好的支撑,因此需采用足够小的桥梁挠跨比。例如,德国TVE试验线最薄弱的路段也采用1/4 000的挠跨比[22],上海龙阳路磁悬浮线路作为世界第一条商业应用高速磁悬浮线路,桥梁挠跨比则达到了约1/17 000,这无疑增加线路建设成本,一项早期研究结果见图4。由图4可见,由于悬浮分布载荷,磁悬浮车辆导致的桥梁动态冲击响应相比轮轨车辆更小[23],根据上海高速磁悬浮实践经验,磁悬浮线路维护成本约为传统高铁的50%[22]。

4 磁悬浮交通方式的分类及系统特征
从不同的角度对磁悬浮进行分类。
(1) 运行速度:如表1所述,可分为中低速、中速、高速、超高速和宇航速磁悬浮;
(2) 驱动方式:可分为车载直线感应电机牵引(LIM),轨道侧长定子直线同步电机牵引(LSM)磁悬浮;
(3) 支撑原理:可分为主动支撑、被动支撑磁悬浮;
(4) 导体材料的应用:可分为常导、高温超导、低温超导磁悬浮;
(5) 永磁体的应用:可分为不采用永磁体、部分采用或主要采用车载永磁体,轨道永磁体磁悬浮;
(6) 悬浮原理:可分为电磁悬浮(EMS)、电动悬浮(EDS)、高温超导悬浮(HTS)、电磁-永磁混合悬浮(本质上仍是电磁悬浮)。
从分类上,可对目前已商业化运用的磁悬浮列车的技术特征进行准确描述。例如,日本高速磁悬浮列车是采用LSM方式的低温超导EDS被动支撑高速磁悬浮系统;德国高速磁悬浮列车是采用LSM方式的常导EMS主动支撑高速磁悬浮系统;日本中低速磁悬浮列车是采用LIM方式的常导EMS主动支撑中低速磁悬浮系统。
对还未实现商业运用的其他系统,也可以从分类上对其技术特征进行准确描述。例如,西南交通大学的超高速磁悬浮方案是采用轨道永磁体和LSM方式的HTS被动支撑超高速磁悬浮系统;美国超级环列车方案是采用LSM方式的车载永磁体EDS被动支撑超高速磁悬浮系统;美国M3列车是采用LSM方式的混合EMS主动支撑中速磁悬浮系统。西南交通大学新一代中低速磁悬浮列车[24]的技术特征描述与日本中低速磁悬浮完全相同,国防科大新型中速磁悬浮列车[25]的技术特征描述与美国M3中速磁悬浮完全相同。
从悬浮架结构、驱动布置方式、导向方式等角度,还可以进行更细致的分类,但其基本技术特征并没有改变。
5 3种不同原理磁悬浮列车的关键技术
磁悬浮列车可以采用3种原理实现悬浮,即电磁悬浮(EMS)、电动悬浮(EDS)和高温超导悬浮(HTS),本节对不同原理磁悬浮列车的关键技术进行分析。
5.1 电磁悬浮列车关键技术
采用电磁悬浮原理的列车已在中低速域和高速域实现了商业应用,例如上海的TR08高速磁悬浮列车,日本、韩国和中国的中低速磁悬浮列车。在中速域的应用研究也备受关注,如西南交通大学的新一代中低速磁悬浮列车,国防科技大学的中速磁悬浮列车,以及美国的M3磁悬浮列车。其中国防科技大学中速磁浮列车和美国M3列车,在电磁悬浮中加入了永磁体,被视为混合电磁悬浮。原理上电磁悬浮也适用于超高速列车,但还未见有相关报导。
电磁悬浮(EMS)利用通电导体产生磁场,磁场吸力吸附轨道铁磁体将车辆吸起,并通过主动控制保持额定的小间隙,该间隙约为8~10 mm。
电磁悬浮方式的关键技术有2个方面:一是如何抑制车线耦合振动,二是如何实现悬浮冗余。
在车线耦合振动方面,应用实践表明车辆悬浮对自身结构、高架线路、以及控制系统非常敏感,尤其是在静悬或低速运行于轻型道岔梁时,车岔耦合振动问题非常突出,极易导致悬浮失效。例如日本的HSST-01、HSST-02、HSST-04车、韩国的UTM-01车均遇到过此类问题。上海高速磁浮线路采用TR09车型后,尽管结构变化很小,仍需要重新优化悬浮控制系统适应已经具有很大刚度的轨道。
在悬浮冗余方面,上海TR高速磁悬浮列车通过电磁铁搭接的结构方式实现了机械冗余,个别悬浮点失效时,车辆仍能保持悬浮。中低速磁悬浮则尚未很好地解决这一问题。
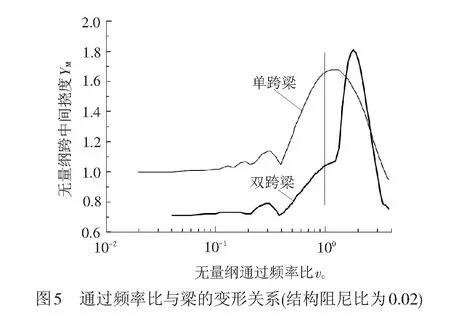
抑制车轨耦合振动的主要措施,目前还是控制轨道梁挠跨比,高速磁悬浮线路还要求尽量提高梁的一阶垂弯频率。在高速磁悬浮线路设计中,通过频率比vc非常重要,定义 “vc=(车速/跨距)/梁的一阶垂弯频率”,它与梁的变形关系见图5。上海高速磁悬浮轨道梁要求vc<0.9,相当于梁的一阶垂弯频率必须大于1.1×(车速/跨距),这一要求显著增加了线路建设成本。
优化悬浮控制也有可能改善耦合振动[26-30],但在特定线路结构和车辆约束条件下,仅靠优化悬浮控制来有效抑制耦合振动的效果并不乐观。
如同传统铁道车辆转向架结构与悬挂显著影响车辆的动力学性能,悬浮架结构与悬挂设计对车线耦合振动也有显著影响。理论和试验表明,西南交通大学提出的低动力作用悬浮架概念,在抑制电磁悬浮列车车线耦合振动方面具有良好效果[31-32]。
5.2 电动悬浮列车关键技术
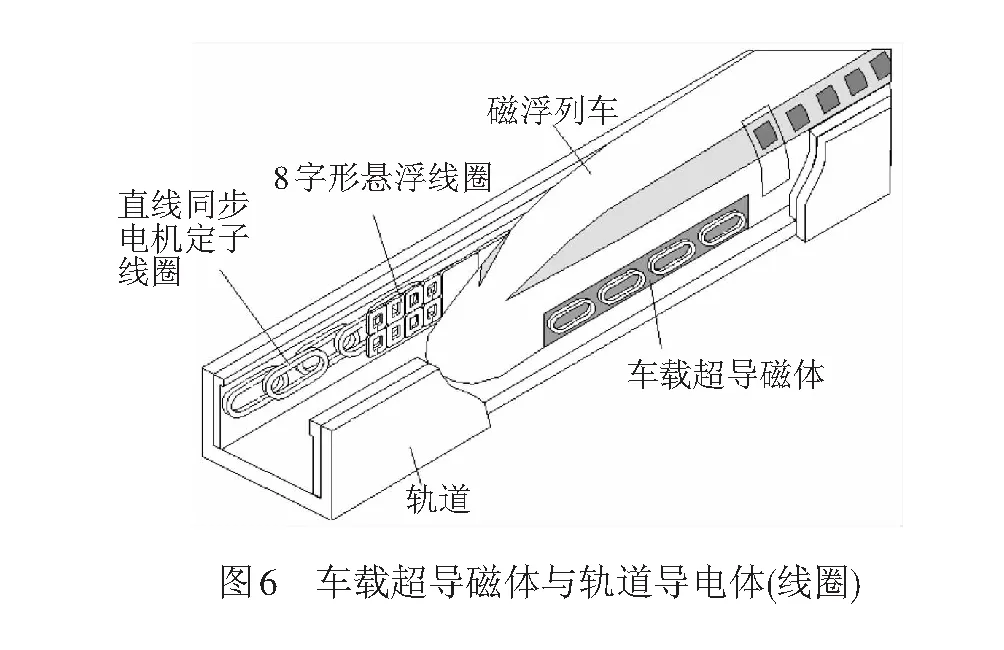
电动悬浮具有车载强磁场和较高运动速度等典型特征。基本原理是,利用车载磁场与无磁的非铁磁材料良导体之间的相对运动,在良导体轨道上产生感应电流并生成镜像磁场,利用两者磁场间的排斥力实现车体悬浮。
随着永磁材料科学的发展,现有永磁体已能基本满足轨道交通运用要求,由此也提出了多种车载永磁体的电动悬浮技术方案。但由于早期永磁体的磁场强度偏弱,难以满足轨道交通工程实际运用需要,因此日本采用了车载超导磁体,见图6,利用强电流产生强磁场继而实现运动悬浮[3,33]。
电动悬浮在低速段磁阻力很大,日本低温超导高速磁浮列车原型车的磁阻力试验值,见图7。当悬浮高度230 mm,峰值达到约130 N/kN,这是一个巨大的阻力值,对比图2可知,它已超过了高速列车400 km/h时的总比阻力,即使列车速度达到了500 km/h,其磁阻力也有约30 N/kN,而轮轨滚动阻力仅为2 N/kN,电磁悬浮的涡流阻力仅约1.5 N/kN。因此电动磁浮方式用于中速域及以下的速度域是极不经济的。有文献认为其最佳运用速度应不低于400 km/h[34]。由于高速时列车空气阻力起主导作用,因此电动悬浮与真空管道技术相结合,实现高速或超高速运行是一种很好的选择。

电动悬浮属被动支撑方式,悬浮工作高度可达到200 mm以上,且只要给予少量阻尼控制就可以实现稳定悬浮。对轨道的要求相对EMS方式要低得多。其关键技术包含2个方面:一是车载强磁场的获得,既可采用超导磁体,也可采用永磁体;二是需要巧妙利用车载磁体与感应磁场的磁力作用,实现高速悬浮状态下车辆的导向。现有工业技术能力,已可应对这些挑战,不存在重大技术障碍。
5.3 高温超导磁悬浮列车关键技术
高温超导磁悬浮基本原理是利用在外磁场中高温超导体独有的强磁通钉扎能力,使超导体能随外磁场变化感应出阻碍这种变化的超导强电流。这种独特的电磁相互作用在宏观上实现了悬浮体的自悬浮与导向,见图8。图8中HPMy、HPMz分别表示一侧永磁轨道的磁场横向、垂向分量;J为感应电流。悬浮力Fz与磁场横向分量相关,在平衡点,因对称得到加强;导向力Fy与磁场垂向分量相关,在平衡点,因反对称而抵消。高温超导磁浮列车不需要主动控制就能实现悬浮和导向,因此质量较轻,且运行方向零磁阻,可实现高速稳定运行[35]。

将高温超导磁悬浮原理用于轨道交通车辆,形成一种新型轨道交通方式[36],巴西将高温超导磁悬浮方式用于城市中低速轨道交通,同原理的高温超导磁悬浮轴承已实现线速度达896 km/h的稳定旋转[37],原理上高温超导磁悬浮方式可适用于全速度域。
高温超导磁悬浮轨道车辆是西南交通大学2000年的原创技术[4],系统主要由车载超导块材及其低温系统、地面永磁轨道系统和直线驱动系统三大关键部分组成,基本结构见图9。巴西、德国[38-39]等也研制了相似结构的磁悬浮实验车。

为充分发挥高温超导磁悬浮列车结构简洁、轻量、零磁阻的优势,西南交通大学结合真空管道概念,进一步研制了新一代高温超导磁悬浮环形实验线及真空管道高温超导磁悬浮试验平台“Super-Maglev”[40],实现了在同等载重能力情况下磁轨截面积最小成本最低的数据,最低实验气压达到2.938 kPa。
高温超导磁悬浮属被动支撑方式,悬浮高度约10~15 mm。其关键技术在于:(1)进一步提升悬浮承载能力。(2)悬浮与导向是相对矛盾的,更高的场冷高度意味着更大的悬浮力,同时也意味着更小的导向力,因此需要用一个合理的场冷高度实现导向力和悬浮力的折衷[41]。(3)低温保持器的合理设计与制造,低温保持器不仅仅起到与外界隔热的作用,它还是车辆的主要承载件,因此需要精密的材料和结构设计。
6 全速度域磁悬浮交通可行性与技术路线
采用电磁悬浮的磁悬浮交通分别在中低速、高速域投入运用十多年[1-2],采用电动悬浮(EDS)的高速域磁悬浮交通商业线正在建设中[3],美国采用固态火箭推进的低温超导电动悬浮滑橇,创造了1 019 km/h的世界纪录,最终目标达到9.1马赫[42],采用高温超导磁悬浮(HTS)原理的轴承实现了线速度达896 km/h的稳定旋转[37]。
因此,从中低速直到宇航速的全速度域,原理上磁悬浮方式均具有可行性。
6.1 中低速域
中低速域磁悬浮交通具有转弯半径小、爬坡能力强、振动噪声低等优势,短板是承载能力有限,适用于中等运量的城市轨道交通。
采用车载短定子方式从线路建设和运维角度,比采用轨道侧长定子方式更经济,因此中低速磁悬浮优先采用车载直线感应电机牵引方式。
常导电磁悬浮和高温超导磁悬浮均可用于该速度域。已投入商业运用的悬浮方式是采用F形钢轨与U形电磁铁相匹配的常导电磁悬浮,是中低速磁浮列车的主流。巴西一直在探索采用高温超导方式[43],其优点是可以采用大挠跨比桥梁,但车辆承载能力、运维要求和技术成熟度还有待进一步验证。
已商业运营的中低速磁列车采用了基本相同的悬浮架结构。最大运用速度为110 km/h。原理上这种方式的速度可以更高,日本第一代中低速磁悬浮曾达到了307.8 km/h的试验速度[44-45]。电磁悬浮要求有效抑制车轨耦合振动,使得系统对线路的要求较高。针对这些问题,西南交通大学提出了创新悬浮架,见图10,试验表明该技术具备实现120 km/h以上运用速度和有效抑制车轨耦合振动的能力。

6.2 中速域
高速轮轨交通在200~400 km/h的速度范围内展现出巨大的优势,在这个速度域磁悬浮交通目前还没有工程化运用的范例。
在中速域采用磁悬浮交通相比于轮轨方式,其优势在于:坡道能力和弯道能力强,列车对线路和车辆产生的振动冲击更小,因而系统运营维护成本较低;劣势在于:系统技术还未得到足够的验证,轨道结构的专用性导致其所需一次性投入的建设成本较高。在具体工程问题中,需要综合考量系统成熟度、建设成本、运营维护成本等经济性指标。
中速域磁悬浮交通的牵引动力通过车载短定子方式已难以满足,应采用轨道侧长定子牵引方式。电磁悬浮和高温超导悬浮均可作为中速域的磁浮交通方式。
2016年国家已将200 km/h中速磁悬浮列车列为重点研发计划,提出的2种方案均采用了电磁悬浮方式和轨道侧长定子牵引,一种方案基于德国高速磁悬浮基本技术,另一种方案是在中低速磁浮列车悬浮架基础上,进行中速域运用的适应性改进,见图11[25]。
目前高温超导磁悬浮列车的关注点要么在中低速域,要么在高速或超高速域,其车辆技术原理上同样适用于中速域。西南交通大学利用环形轨道对高温超导单悬浮模块进行了实验研究,相对运行速度已达到238 km/h[46],为中速域高温超导磁悬浮提供了一个基本方案。

6.3 高速域
按2016年7月颁布的《中长期铁路网规划》,到2025年中国高铁里程将达到3.8万km,“八纵八横”高速铁路主通道将实现相邻大中城市间1~4 h交通圈。目前中国民航业共有206个民用机场,国内远距离城市间基本上能实现4 h通达[47]。在此背景下,发展高速域磁悬浮仍有其必要性。400~1 000 km/h的高速域磁悬浮,可视为轮轨高铁向更高速度的延伸,填补了轮轨高铁与航空客运的速度空白,可强化轮轨高铁已有的优势和经济聚集效应,进一步转移航空客流,有利于中国实现对国际社会的减排承诺[48]。高速磁浮的能耗和排放与其他客运交通方式的对比见表2。
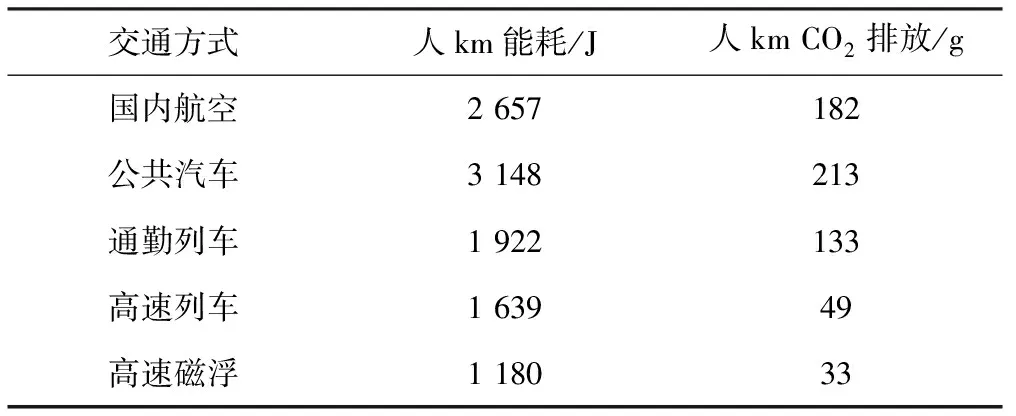
表2 不同交通方式的能耗与排放[49]
3种悬浮原理均适用于400~1 000 km/h这一范围。由于速度、受流、轻量化等要求,需采用轨道侧长定子牵引方式。
常导电磁悬浮已实现了高速域商业应用,低温超导电动悬浮的商业线也在建设之中,2016年中国已将600 km/h高速磁悬浮列车列为重点研发计划,采用了德国常导高速磁浮交通技术路线,但在悬浮功耗、列车阻力、最高速度等方面进行了较大改进与提升。
在这一速度域,列车与真空管道技术的结合还没有形成确定的速度界限,目前正开展的600 km/h的高速磁浮交通系统关键技术研究,没有与真空管道技术结合。
高速域磁悬浮还处在发展初期,技术路线的研究和确定尤其重要。可借鉴的有德国、日本2种不同技术路线。高温超导磁悬浮也适用于高速域,目前西南交通大学正在建设400 km/h级的高温超导磁悬浮高速运行试验平台,预计2019年底完成。
除以上所述外,还存在第4条技术路线,即采用常导车载永磁电动悬浮的技术路线,既可避免常导电磁悬浮对轨道的极高要求,也可避免超导电动悬浮在超导应用方面的技术难点,典型的车辆方案有美国磁飞机、超级环等。永磁材料科学的发展,为这一技术路线的实施提供了有力支撑。
6.4 超高速域
超高速域从亚音速直至超音速,将轨道交通置于真空管道环境中是目前惟一的途径,依赖磁悬浮实现车辆非接触运行也是必然选择,两者合而为一形成了真空管道磁悬浮技术路线[5,40]。
超高速域的速度跨越非常大。从公共客运交通属性看,目标速度并不是仅按交通工具的特定能力来确定,需要考虑多方面因素合理确定[15]。超高速轨道交通的最低要求是能达到与航空相当,实现转移航空客流的目的,其次是要满足未来公众对更高速度的期望。作为公共客运工具,1 000~2 000 km/h速度范围是超高速域磁悬浮轨道交通努力的目标。从非公共交通属性,利用数倍于音速的磁悬浮轨道式超级载体,可以成为多种科学试验的平台工具。美国的磁浮滑橇达到了1 019 km/h的最高速度,且最终目标是9.1马赫,中国也在开展类似研究,由西南交通大学承担的“多态耦合轨道交通动模试验平台”的建设工作业已启动。
真空管道作为高速或超高速域列车的基础设施,需要解决超长度真空管道的建设,真空获得与维持,环境控制,灾害预防,应急救援,适用车辆,站场过渡等一系列在传统交通工具中不曾遇到的技术问题[50]。
高温超导磁悬浮、电动磁悬浮已被证实,原理上可达到超过1 000 km/h的速度[35,37],常导电磁悬浮原理上也适用于超高速域,但目前还没有相关试验验证的报导。因此,超高速域磁悬浮列车采用“真空管道技术(ETT)+高温超导磁悬浮(HTS)”或者“真空管道技术(ETT)+电动悬浮(EDS)”2种技术路线都具有可行性。前者具有永磁轨道、可静悬、零磁阻等特点,从工程化角度,需要解决好大载重悬浮、合理分配悬浮和导向力、低动力作用车辆设计等关键技术;后者具有轨道简单的特点,需要解决好弯道导向、列车轻量化等关键技术。这2种技术路线均已开展相关研究,实现工程化都需要坚持不懈的努力,才能久久为功。
6.5 宇航域磁悬浮
利用一次性火箭进行航天发射成本高昂,每公斤发射成本通常为2~3万美元,SpaceX公司使用可回收并重复使用的推进器发射重型火箭,不仅直接降低了发射成本,而且减少了太空垃圾,低成本可循环航天货运发射不再是一个梦。
然而,将磁悬浮平台非接触运行和电磁大推力推进的特点相结合并用于航天发射,或至少部分用于航天发射[51],是一项极具挑战性的任务。
原理上最适合于这一任务的技术路线是“真空管道+超导电动磁悬浮系统”,采用超导获得极强的移动磁场,采用真空管道尽可能快地获得速度,减小对基础设施长度的要求,采用电动磁悬浮可以显著减小对轨道精度的要求,轨道侧长定子应当布置在垂直面,以利用车载超导磁体的强磁场获得最大的推力。这一技术路线移动平台的技术特征与美国NASA的磁浮滑橇相同。已有学者对其技术路线进行了尝试[51-52]。
7 结束语
我国高速列车已实现了350 km/h商业运行,高速磁悬浮列车已具备500 km/h的运用能力,技术的发展已激发对更高速的期盼,追求1 000 km/h甚至更高的轨道交通速度已然成为一个大趋势[53]。
基于磁悬浮非接触运行的基本原理,其应用速度范围可覆盖从城市轨道交通速度直至数个马赫,本文提出了全速度域的概念覆盖这一宽泛的速度范围,并将其划分为5个等级。
磁悬浮列车实现悬浮的3种基本方式分别是电磁悬浮、电动悬浮和高温超导悬浮。其中,电磁悬浮方式和高温超导悬浮方式具有在全速度域均可运用的潜力,前者的技术关键是有效抑制车轨耦合振动,后者的技术关键是进一步提升承载能力。电动悬浮方式可用于高速域,由于磁阻力很大,不适用于中速及以下速度域。
目前在中低速域和高速域均已成功实现磁悬浮轨道交通商业化运营,在中速域和超高速域应用磁悬浮交通的研究也在持续开展。从原理可行到工程化实现,尚需解决一系列关键技术。超高速磁悬浮交通是一个十分复杂的巨系统,如何加速突破技术瓶颈并将众多关键技术有机集成实现工程化和商业化,还有大量的工作要做。