密度跃层中潜航体激发内波的数字纹影实验研究
2019-04-17尹政蒋小勤
尹政, 蒋小勤
(海军工程大学 物理系, 湖北 武汉 430033)
0 引言
声纳是各国海军进行水下监视使用的主要技术,然而,随着舰艇声学隐身技术的不断发展,舰艇的声学信号变得难以捕捉和检测,声纳已不再能满足探测需要。为此,国内外学者开始着手于开展水下目标非声信号研究,而内波即为其中一种可以用于水下目标探测的非声信号。
潜航体激发的内波有体效应内波、坍塌内波和随机内波3种[1]。现有文献研究内波的方法主要有理论分析、实验室模拟、运用高性能计算机进行数值模拟和现场观测研究4种,本文主要采用实验室模拟方法研究内波。实验室探测内波的手段主要有电导率仪测量、阴影摄影、染色摄影、纹影技术以及随着新技术的应用而出现的粒子图像测速(PIV)技术和数字纹影技术。每种测量方法都有各自的优缺点,以最常用的电导率仪为例,优点在于电导率测量为接触式测量方法,可以直接获取测量信号,因此响应快、测量精度高。缺点在于测量时,电导率探头需要进入流场测量数据,势必要接触流场,对整个流场会产生干扰。相比而言,数字纹影技术是一种半定量全局观测流场方法[2],既能得到三维内波场整体特征信息,又对流场没有干扰,但其所测量数据需经过计算机处理才能得到详细内波场信息。Sutherland等[3]于1998年通过数字纹影技术水平观测到小球在分层流体中震荡产生的圣·安德鲁斯十字架内波场。Maxworthy[4]对数字纹影水平观测的理论和实验方法进行了研究,并理论推导了数字纹影水平观测介质变化与表观位移场之间的变化关系。
在国内,周文进等[5]采用数字纹影技术垂向观测的方法研究了运动潜航体在线性分层流体中湍流尾迹激发随机内波的传播演化规律。杨圣言等[2]采用三方向数字纹影技术观测了潜航体在线性分层环境中,三维内波场的部分空间演化规律。对于三分层流环境潜航体航行激发内波的研究,王进等[6]在具有强密度跃层的分层流体中,采用沿水槽中纵剖面对称布置电导率探头阵列方法,对拖曳运动激发内波时空特性进行了一系列实验研究。陈科等[7]在已有针对拖曳球产生内波的等效源理论模型基础上,针对体积效应内波提出了不同长径比模型的等效源移动速度和体积的设置方法。杨立等[8]利用直流电导率检测技术,研究了双分层流和线性分层流环境下潜艇尾迹内波产生的特点和规律。已有公开可查阅文献中,尚未发现采用数字纹影方法研究三分层流体中潜航体激发内波的。因此,本文采用数字纹影技术垂向观测在密度跃层中航行的潜航体激发的内波场,获得了典型“>”型内波图像,测量了其特征量与弗劳德数Fr的关系,研究结果对于认识分层流中内波场水平方向的传播规律及其目标特性具有一定参考价值。
1 实验设备与分层流剖面
1.1 实验水槽
实验采用水槽尺寸为长2 400 mm、宽800 mm、高700 mm,如图1所示。水槽由不锈钢架和透明钢化玻璃制成,左右有塑料杆,用来调节潜艇模型在水槽中的航行深度,也可减少调节航行深度时的水体扰动。实验室室温约20 ℃,实验时关闭门窗,减少空气流动对水体表面的影响。

图1 水槽示意图Fig.1 Schematic diagram of sink
1.2 实验模型
实验模型为基洛级潜艇模型,采用电机拖动其运动。如图1所示潜艇模型,其头部为椭球形,拆除平衡板以及螺旋桨,尾部呈现为流线型椎体。潜艇模型长200 mm,最大直径D=30 mm,长径比为7.
1.3 模型拖曳系统
为更好地控制潜艇拖曳速度,采用减速直流电机拖动模型运动。电机上可以安装不同直径的驱动轮来调节拖曳最大速度和最小速度。直流电机核定电压12 V,直流电源输出电压调节范围为3~20 V,控制精度为0.01 V. 通过实验测量得到拖曳速度与电压之间呈线性关系。
在潜艇模型上设置一根带圆孔的引导杆,中间拉一根有一定张力的线以防在拖曳过程中潜艇模型侧翻,使模型稳定运动。如图1所示,减速电机带动的拖曳绳索用直线表示,其他固定拖曳绳索的支架已省略。观测潜航体在密度跃层激发的三维内波场的实验中,将潜艇模型置于距离水槽底部310 mm密度跃层中心位置。
1.4 分层流剖面
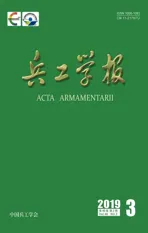
海洋环境通常可看作混合层、斜温层和深水层三分层流环境[9-10]。其中:混合层位于海洋表层,深100~200 m;斜温层位于混合层与深水层之间;深水层位于距离水面800 m直至水底。斜温层温度随深度迅速变化等因素的影响会出现密度跃层,其突出特点为密度梯度变化很大,而内波主要与基于浮力频率的弗劳德数Fr有关,所以在密度跃层中航行的潜艇激发的内波场势必与线性分层环境中不同。实验时,采用高600 mm分层盐溶液作为实验环境,适当增大水槽密度跃层厚度,以便于观测密度跃层内波传播特征。本文实验根据流体力学的相似性原理[5],依据内波传播的相似准则数,即基于浮力频率的Fr进行实验剖面设计。同时,考虑到实验室水槽长度有限,为在有限空间尽量观测到波的一个完整周期,因此波长不宜过长。经过多次实验发现,浮力频率大于1 Hz时可以观测到较好图像。综上所述,设计密度和浮力频率垂向分布。本文采用双缸法配置多密度层分层盐溶液环境,在两种密度梯度液体之间设计一个密度跳变,依靠液体扩散形成中间的密度跃层。静止1~2 d,便可获得很好的三分层流环境。实际配置得到的三分层流剖面的密度和浮力频率曲线如图2所示,在高310 mm处标出潜艇模型位置及其航行线。实验设计的盐溶液环境密度跃层浮力频率约为2.2 Hz,厚约100 mm,密度跃层中心位于高300 mm处。密度跃层以上浮力频率约为0.4 Hz,密度跃层以下浮力频率约为0.7 Hz,符合实际设计结果。如图3所示为实验前和实验后密度剖面曲线,在高310 mm处标出潜艇模型位置及其航行线。实验拖曳历时5 d. 从图3中可以发现,潜艇模型在实验水槽中的运动对密度跃层环境影响有限,不会破坏三分层流环境。

图2 实际三分层流剖面的密度和浮力频率曲线Fig.2 Actual three-layered fluid profile density and float frequency curves
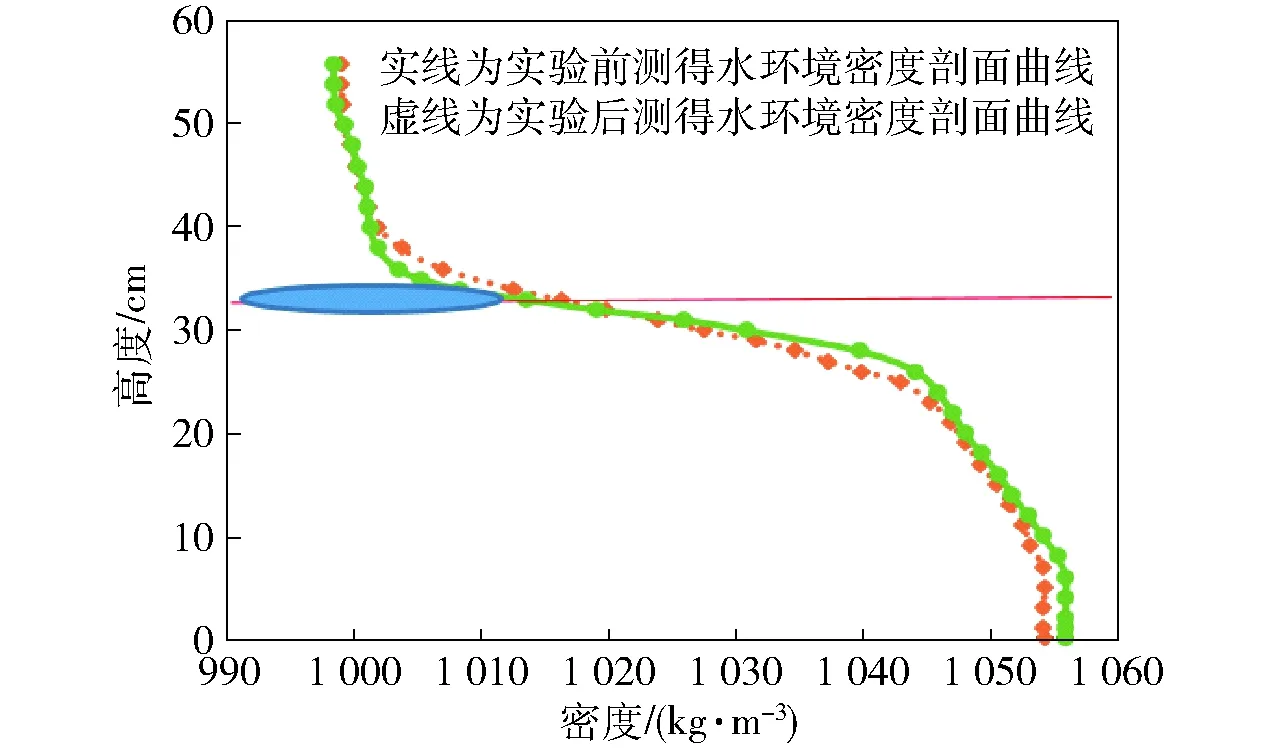
图3 实验前和实验后的密度剖面曲线Fig.3 Density profiles before and after experiments
2 内波数字纹影观测原理
现代数字纹影是利用数码摄像机及计算机处理图像软件,对透明介质流场中的物理场进行测量的一种技术。数字纹影技术减少了复杂的光学仪器,对流场无扰动,测量结果更加直观,设备结构更加简单,研究人员架设和操作更加方便。进行二维内波场的测量是数字纹影技术的一个重要应用。图4所示为数字纹影技术垂向观测示意图。曲线轨迹表示光束穿过稳定分层水后的光线传播路径,数码摄像机在流体中的实际拍摄范围如图4阴影部分,所得图像是整个光路的积分结果。杨圣言等[2]得到了数字纹影技术水平观测实验的表观位移和密度变化的定量关系,但并未说明数字纹影技术垂向观测的表观位移和密度变化的定量关系。水平观测和垂向观测原理类似,都是由扰动引起流体折射率变化,从而改变表观位移场,目前数字纹影技术是可以垂向观测内波场。实验采用数字纹影技术垂向观测内波场,将拍摄的内波图像和数值模拟理论计算出的内波场相比较,可以发现二者图像十分相似,与航行方向同向的拖曳方向波长λx结果也和数值模拟理论计算一致。因此,可用数字纹影技术垂向观测内波场来得到部分定量结果。

图4 垂向拍摄范围示意图Fig.4 Schematic diagram of vertical shooting range
3 实验结果分析
本文系统研究了Fr与潜航体在三分层流环境中的密度跃层航行,激发三维内波场的目标特征之间的关系。实验中,Fr∈(0.6,4.0),雷诺数Re∈(1 080,7 000).
3.1 Fr对波长的影响
潜航体激发的内波场实际上是一系列波源产生的内波叠加结果,十分复杂。但在实际应用中,叠加过程并不被关注,被关注的是内波场的目标特性,因此将与航行方向相同的直线上两个波峰或两个波谷之间的长度,即λx作为内波场的目标特性。如图5所示,实验中标定系数为0.25 mm/pixel,结合标定系数可得到每个像素对应的实际长度。航行线附近扰动过大不利于数字纹影技术的观测,故选取图像中偏移航行线的偏移量Ny=200 pixel,300 pixel,350 pixel位置进行λx测量。为了具有更广泛意义,故Ny采用无量纲长度表示。图像中,潜航体模型直径Nd=120 piexl,无量纲长度偏移量定义为Ny与Nd的比值Ny/Nd,Ny/Nd=1.7,2.5,2.9. 因为波长是随着时间和空间变化的函数,所以选取潜航体模型刚过视场的5幅图进行处理,取所有波长平均值。把偏差值在图表中通过上下界表示出来,如图6~图9所示。由于视场限制,在Fr进一步增大后,波长变得太长但数码摄像机拍摄视场有限,无法测量出准确结果,因此测量出Fr∈(0.6,1.9). 在密度跃层航行实验结果如图6~图8所示。

图5 Ny=300 pixel时提取数据低通滤波得到的曲线Fig.5 Low-pass filtering of the extracted data for Ny=300 pixels
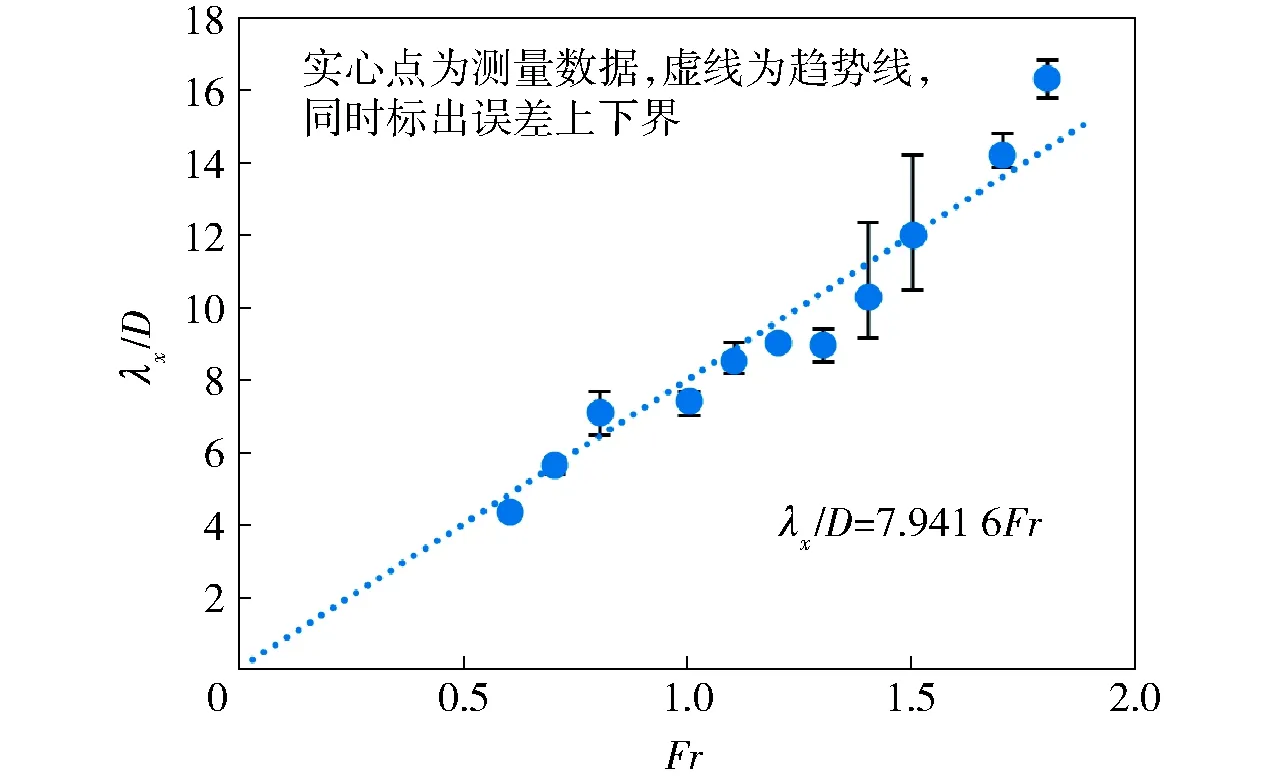
图6 λx随Fr变化曲线(Ny/Nd=1.7)Fig.6 λx vs. Fr(Ny/Nd=1.7)
图7 λx随Fr变化曲线(Ny/Nd=2.5)Fig.7 λx vs. Fr(Ny/Nd=2.5)
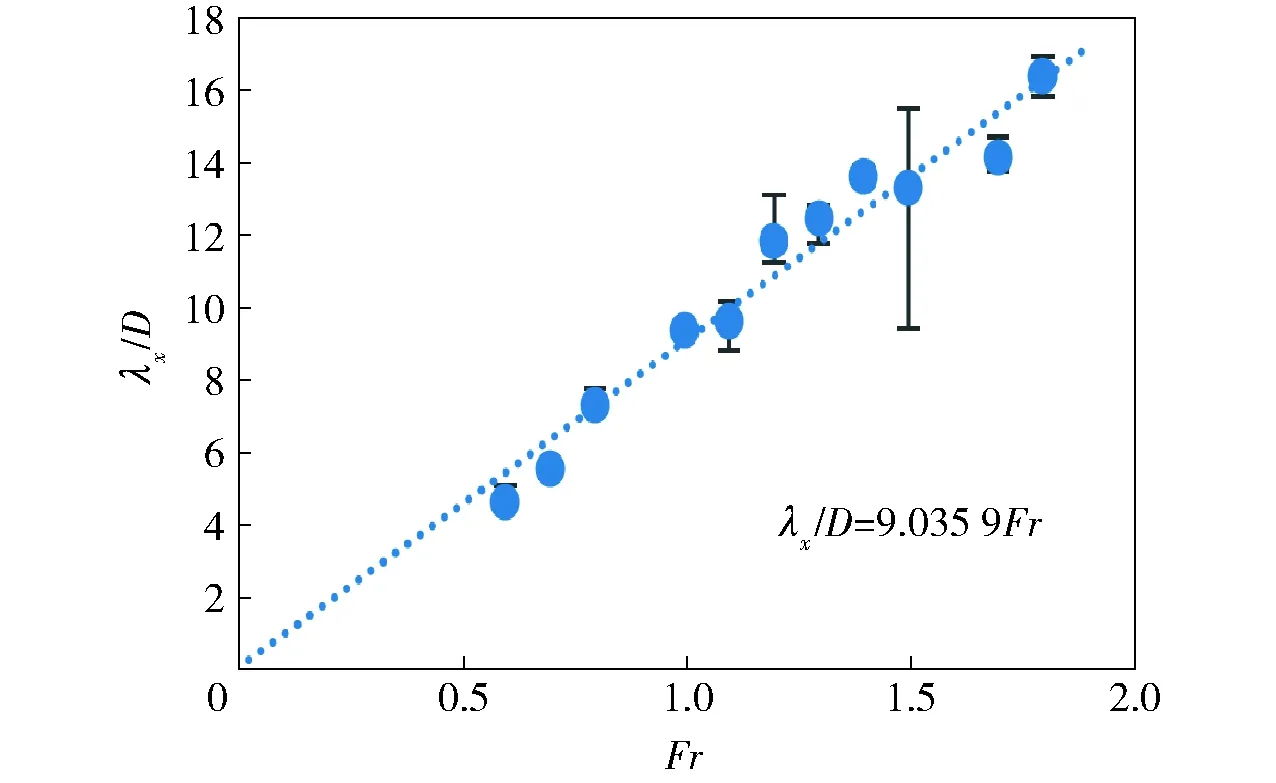
图8 λx随Fr变化曲线(Ny/Nd=2.9)Fig.8 λx vs. Fr(Ny/Nd=2.9)
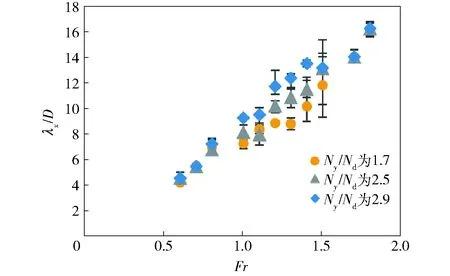
图9 λx随Fr变化曲线(Ny/Nd=1.7,2.5,2.9)Fig.9 λx vs. Fr(Ny/Nd=1.7,2.5,2.9)
通过图6~图8可以看出,偏移量相同情况下,内波的λx与Fr呈正比。理论上,潜航体经过时相当于在流体中留下一系列振动源,数字纹影技术观测到的波是一系列内波叠加的结果,所以潜航体速度越快,经过内波一个周期时间,同相位振动源之间距离就越长。由于潜航体匀速通过流体,没有其他干扰,可认为内波叠加过程都是相同的,两个同相位点可以看作前两个同相位点的重复,因此λx与拖曳速度呈正比。实际观测结果与理论结果一致。通过图9比较不同偏移量、相同Fr情况下的λx,Fr∈(1.0,1.5)时,有差别但此时误差也较大,两端波长几乎没有差别,因此随着偏移量增大,内波的λx变化不大。由于水槽大小有限,水槽边壁存在波反射等现象导致靠近视场边界的部分波长测量出现较多干扰,因此偏移量无法进一步增大。实验误差普遍在0.8无量纲单位以下,但是,在Fr为1.4和1.5以及接近2.0时,测量波长误差较大。原因在于:当Fr为1.4和1.5时,Re∈(2 500,2 700),可能是由于此时层流向湍流转变导致波长变化较大;当Fr接近2.0时,波长较长而视场有限,不能很好地观测波长结果。
3.2 波角随Fr变化规律
“>”型内波波角是时空相关的函数,波角与传播时间和空间位置都有关系。但是,潜航体尾部刚激发的内波如图10所示,波角没有充分发展,波角两臂可以看成是直线,因此按照图10方式测量波角作为内波的信号特征。图10中,红色表示表观位移场为正,蓝色表示表观位移场为负。实验中,Fr较大时,潜航体模型周围流体有与航行方向相同的速度,会影响数字纹影技术的观测结果。测量角度时,使用与航行方向垂直的位移分量数据合成伪彩图。统一取视频中模型通过视场后的第二幅图进行图像处理,以此时的角作为波角数据,多次测量后取平均值作为Fr下的波角。进行角度测量过程中,由于内波波角两臂具有一定厚度而并非直线,从而导致测量结果相差很大,因此,需依据图像中相邻波角的变化趋势来分析测量的角度是否合理。随着Fr增大,λx较长,在角度测量中无法依据角度变化趋势来判断结果是否是最好的,同时,流体从层流变为湍流,会影响对于伪彩图的观测。因此,只给出Fr∈(0.6,1.9)的结果,得到的半波角数据如图11所示。
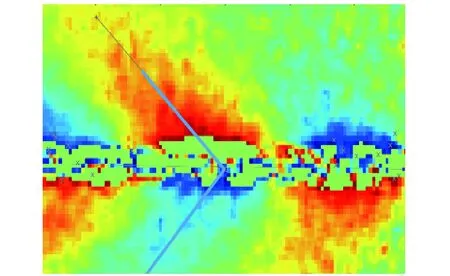
图10 波角的测量Fig.10 Measured wave angle
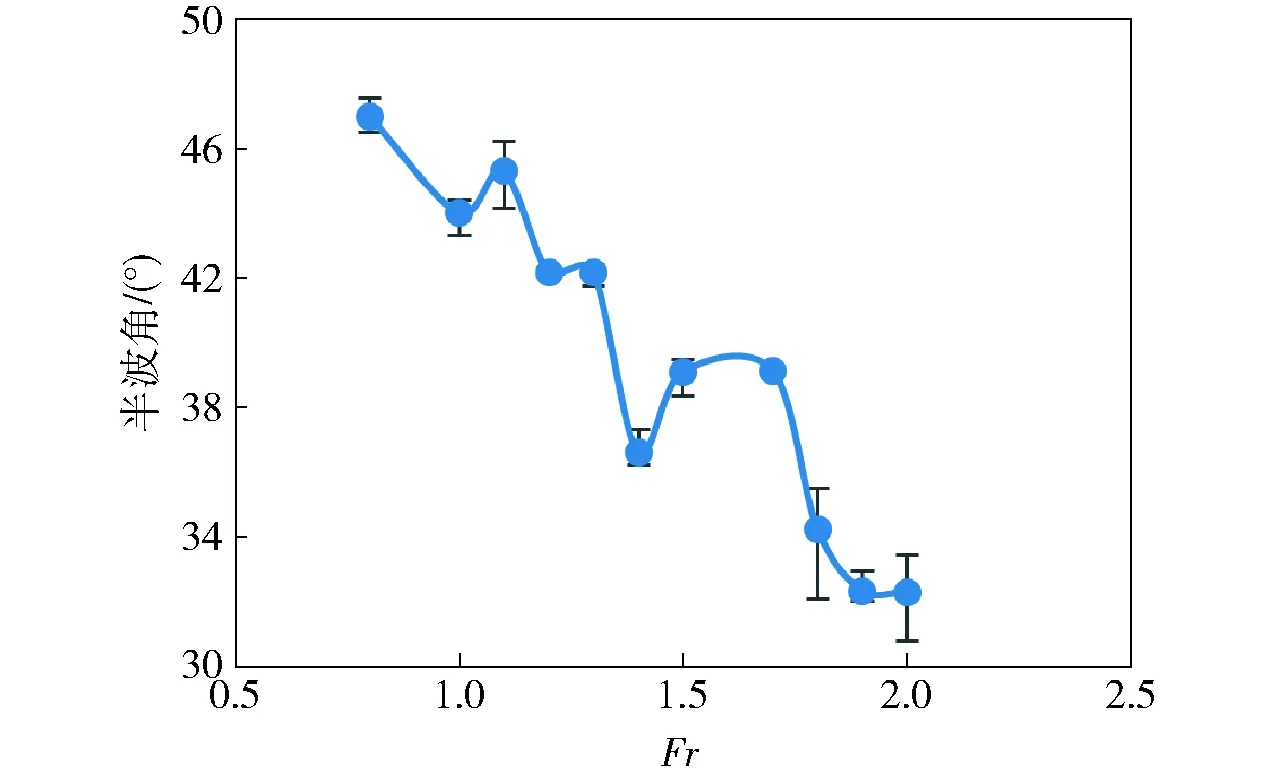
图11 半波角随Fr变化规律Fig.11 Half wave angle vs. Fr
从图11可看出,半波角随着Fr增大而减小。同时,在Fr为1.5时出现一个异常跳变,此时Re为2 700,处于层流向湍流过渡区域,因此猜测波角跳变原因在于内波类型由体效应内波向随机内波转变而引起的。
3.3 波角随无量纲长度的变化
实验中,数码摄像机视场和水槽大小的限制使得无法观测到很大范围的内波场形态。因此,通过测量潜航体通过相同时间间隔的视场,拼接模型经过视场后的表观位移场。如图12所示数字纹影技术垂向观测内波图像,可以得到类似开尔文水面波的“V字张角,开口方向与航行方向相反,且波角两臂实际上呈曲线形态,远离潜航体模型一侧。内波经过较长时间演化,内波形态曲线特征更加明显。伪彩图中速度场矢量的计算个数乘以速度场矢量的空间分辨率即可转化为相应的实际空间尺度。

图12 垂向观测得到的速度场分量伪彩图Fig.12 Component pseudo-color map observed in the vertical direction
如图13所示通过电导率探头矩阵得到的内波图像[11],拖曳模型激发内波对称部分和反对称部分的时空形态特征结果,同时还给出了相同速度下的内波等相线图。其中,等相线图中的虚线为第二模态波系,而实线为第一模态波系。图13中可清楚地看到内波的“V”字张角,也可以通过等相线看到“V”字张角两臂呈曲线。因此通过数字纹影技术垂向观测到的图像与潜航体激发内波是相符的。如图14所示为数值模拟结果的简化示意图,上下情况类似因此只画了1/2. 潜航体尾部刚经过时,内波发展时间较短,所以内波传播距离较短;远离潜航体尾部时,传播时间较长,传播范围较远,作一条包络线表示内波作用范围。
过去的研究中,通常将内波场波峰线近似看成直线,本文为了更好地描述内波场曲线特征,采用伪彩图中靠近航行线Lh的直线Lj和靠近视场边界的直线Ly与波峰线的交点作切线,将切线与航行线Lh的夹角,即航切角作为内波的信号特征进行测量。曲线切线角度变化是连续的,故A点、B点所测量到的角度可以用来表示曲线AB的切线与航行线Lh的航切角变化范围。无量纲距离可表示为L/D,其中,L为从模型尾部到过直线Lj的切线与航行线Lh的航切角最前端位置距离。直线Lj和直线Ly距离航行线Lh的垂直无量纲距离Ny/Nd分别为1和3. 通过Photoshop软件对内波张角进行测量,由于人为测量会产生较大误差,取多次测量平均值,测量结果如图15所示。
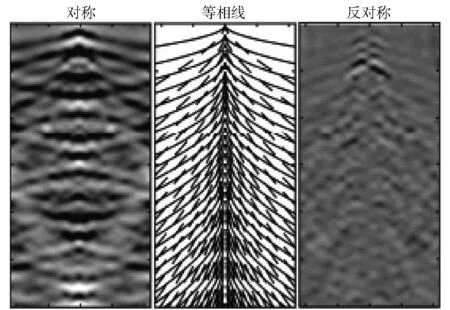
图13 电导率测量得到的拖曳模型激发内波的图像[11]Fig.13 Time-space morphological characteristics of internal waves excited by drag model [11]

图14 拼接图的简化示意图Fig.14 Simplified schematic diagram of stitched photos

图15 λx随无量纲距离变化曲线Fig.15 λx vs. dimensionless distance
由图15可以明显看出,内波张角随无量纲距离的增大而减小。并且,减小过程大致可以分为3个阶段:
1)第1阶段。刚开始时,内波还没有完全发展,此时过直线Lj的切线与航行线Lh的航切角随着内波发展变化较快。
2)第2阶段。过直线Lj和过直线Ly的切线与航行线Lh的航切角随着无量纲距离的增大而减小。
3)第3阶段。过直线Ly切线与航行线Lh的航切角稳定,变化较小。过直线Lj切线与航行线Lh的航切角出现一个跳变,但是依旧随着无量纲距离的增大而减小。
4 结论
本文在实验室模拟的三分层流环境中,采用数字纹影技术垂向观测了潜航体在密度跃层航行产生内波场的目标特征。通过所得图像可知,内波场呈类“>”型张角特征,开口方向与航行方向相反,“>”型张角两边呈弧形。当Fr<1.4时潜航体激发出体效应内波;当Fr=1.4时,出现湍流尾迹。进一步分析潜航体激发内波场的目标特征,得到结论如下:
1) 实验测量到同一工况下,λx随着Ny/Nd增大其变化并不明显。Ny/Nd相同时,λx与Fr呈正比。
2) 内波张角随Fr的增大而减小。随着潜航体模型航行速度增大,处于层流向湍流过渡区域的波角会发生跳变。
3) 定义航切角来描述内波场“>”型张角的曲线特征,用伪彩图靠近航行线和靠近视场边界的两条平行于航行线的直线与波峰线相交的航切角来表示两条直线之间波峰线上航切角的变化范围。由实验结果可知,偏移航行线距离相同时内波波角随无量纲距离的增大而减小。
4) 电导率测量得到的内波形态与数字纹影技术垂向观测到的内波表观位移场伪彩图中的形态一致。说明数字纹影技术垂向观测能够一定程度上定量观测内波特征,但是具体密度场变化与表观位移场之间的关系需要进一步研究。