可联网立体车库智能控制系统设计
2019-04-16薛裕峰黄雪颖
薛裕峰,牛 丹*,黄雪颖,李 涛,李 凡
(1.东南大学自动化学院,南京 210096;2.教育部“复杂工程系统测量与控制”重点实验室,南京 210096;3.江苏聚力智能机械股份有限公司,江苏 苏州 215212)
近年来,随着人们消费能力水平的不断提升,私家车数量逐年增加,如何利用有限的城市空间满足日益增长的停车需求已成为当前亟待解决的城市问题[1].立体车库的单位面积车容量大、建设成本低,并且有不同规模的工程设计,能够适应不同容量的用户需求[2].因此深入研究立体车库控制系统,建造安全、可靠、稳定、智能的立体车库对日常生活具有重要意义.
智能立体车库一般由机械系统、控制系统、液压辅助系统、电气系统、传感器系统组成,融合了机械、数控、计算机、自动化、传感器、人工智能等技术,是一种智能化、立体化的物流储运系统[3].自1920年美国建成第一座机械式升降立体车库以来,其相关技术不断向着智能化、网络化的大趋势发展[4].如何利用计算机、物联网、云计算和嵌入式技术实现自动存取、自主收费、网上预约、远程管理、网络监控、故障诊断与预警,成为当下立体车库研究的主要方向[5].由于可编程逻辑控制器(programmable logic controller,PLC)安全稳定、板载资源丰富,目前国内外的立体车库设计多利用PLC控制车位挡板移动,车主停取车时可通过触摸屏或识别集成电路卡启动控制[6].目前主流的基于PLC的立体车库控制系统可以管理单个立体车库,但还无法实现对多个无人立体车库的联网管理、车位信息发布、远程监控等功能,无法满足市场对智能立体车库的需求.
本文设计的可联网立体车库智能控制系统采用进阶精简指令集机器(advanced RISC machines,ARM)作为核心控制器[7],采用PLC控制机械结构,并设计了立体车库环境的车牌识别系统和相应的网络通讯系统,实现了现场数据和相关控制指令的网络传输.实地测试结果表明,本设计实现了无人立体车库联网管理、车位预约、在线付费、云端可视化监控、故障诊断和预警等功能.
1 系统功能设计
本文设计的立体车库智能控制系统结构如图1所示,主要包括三部分: 车位预订和车库管理云平台、嵌入式控制系统、PLC控制系统.其中,嵌入式控制系统包括基于ARM的嵌入式控制系统和基于数字信号处理(digital signal processing,DSP)的嵌入式车牌识别系统.
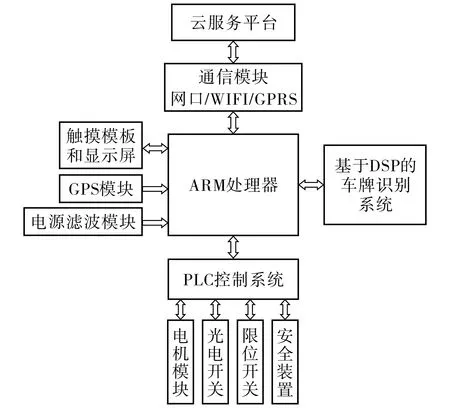
图1 立体车库智能控制系统结构图Fig.1 Structure of stereo garage intelligent control system
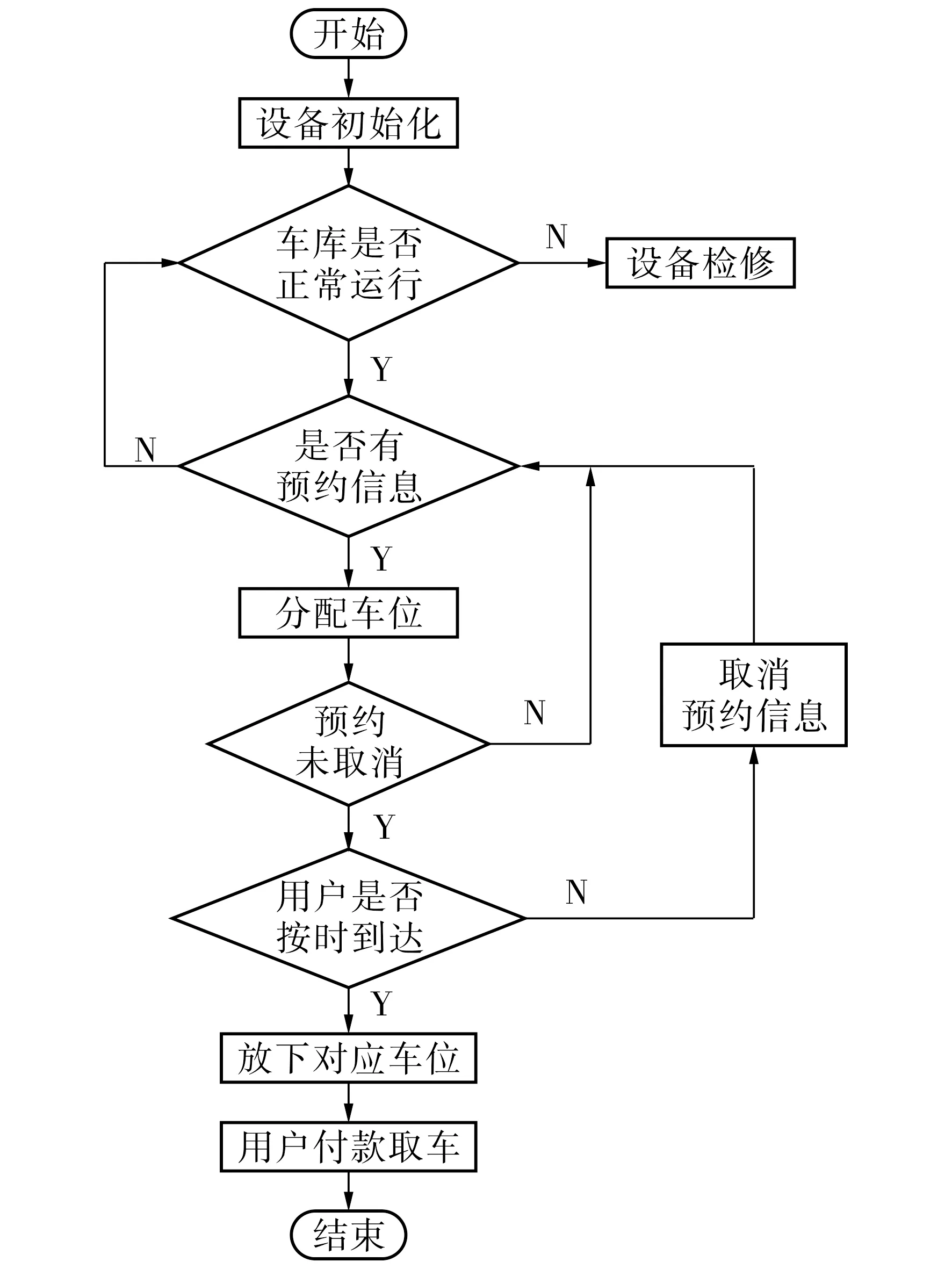
图2 车位预订和车库管理云平台控制软件流程图Fig.2 Software flow chart of parking space reservation and garage management cloud platform
车位预订和车库管理云平台的功能有: ① 接收车库智能控制器上传的车库相关数据,并分别存入车位分配数据库和车库运行数据库中;② 接收车库智能控制器上传的待存车辆车牌信息,并存入计费服务数据库中;③ 接收云门户(网站或APP)发来的车位预订信息,并与ARM控制器传来的车牌信息对比,得出相应存取命令发送给ARM控制器;④ 接收车库运营方的故障指令;⑤ 管理用户、管理员信息;⑥ 计算停车费用并通过网络发送到车库智能控制器和云门户端;⑦ 通过历史和实时数据预测、诊断车库运行故障,并通过网络推送到云门户端.PLC系统控制电机升降横移实现车辆出入,并通过光电开关检测车位状态、车库运行状况以及限位开关状态,然后通过RS-485、RS-232等有线通信方式传输给ARM控制器.基于DSP的识别系统检测车牌信息,并传送至ARM控制器[9].ARM控制器再通过以太网口、WiFi和GPRS等网络通信方式将接收数据传输到车位预订和车库管理云平台.
2 云平台
车位预订和车库管理云平台硬件设计包括网络通信方式选择、元器件选择和通信电路设计.为满足不同车库环境的需要,云平台和控制系统之间的网络通信拟采用以太网口、WiFi和GPRS方式,其对应的元器件选择和通信模块设计如表1所示.云平台控制软件设计流程如图2所示.
3 嵌入式控制系统
3.1 基于ARM的控制系统
基于ARM的控制系统是实现立体车库与云平台交互的信息中转站,本文选择STM32F429-IGT6作为其主控芯片,并设计相应电源模块(包括分压电路、稳压电路、过载保护电路)、最小系统(包括时钟电路、下载电路、复位电路等)、通信模块(包括RS-485、RS-232通信电路等)、接口电路(包括DB9、RJ45接口电路)和保护电路(包括BAV99、TVS保护电路).通过RS-485、RS-232等串口通信方式接收PLC控制系统的电机运行数据、车位状态、故障情况和车牌识别系统识别的车牌信息,并将这些信息通过以太网口、WiFi和GPRS等方式发送给云平台,同时接收云平台发来的车库控制命令,再用串口通信的方式发送给PLC控制系统.RS-485、RS-232等串口通信方式须设置相应的波特率、数据位、校验位和校验方式.基于ARM的嵌入式控制系统与PLC控制系统之间采用HOST-LINK通信协议,与车牌识别系统之间采用自行设计的通信协议,与云平台之间采用HTTP协议、POST方式和CJSON数据格式进行通信.基于ARM的嵌入式控制系统软件设计流程如图3所示.
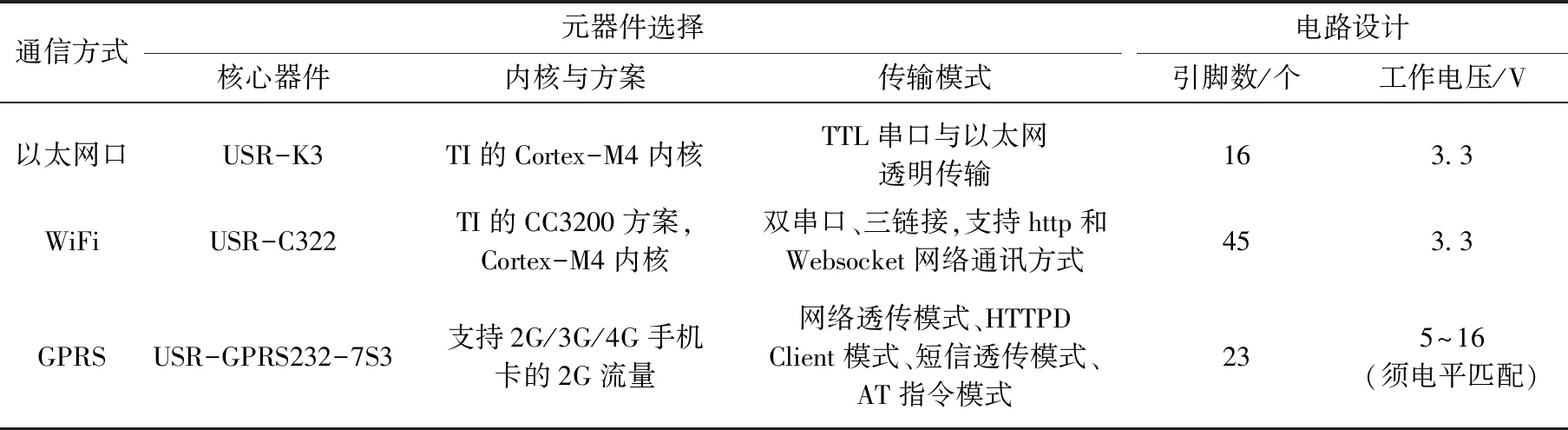
表1 不同通信方式的元器件选择和通信电路设计Tab.1 Component selection and communication circuit design for different communication methods
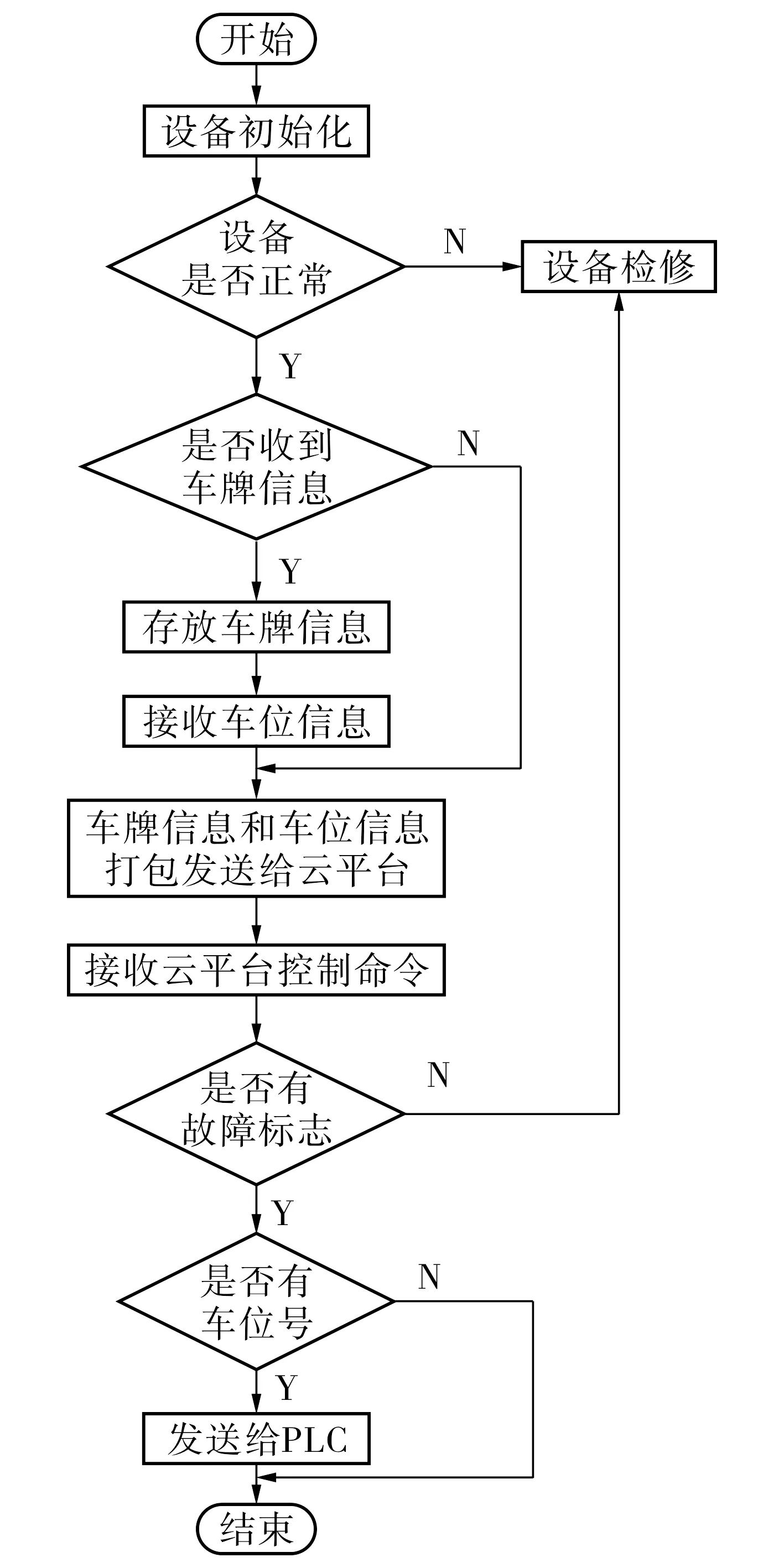
图3 基于ARM的嵌入式控制系统软件流程图Fig.3 Software flow chart of ARM-based embedded control system
3.2 基于DSP的车牌识别系统
车牌识别系统要处理视频流和图片、进行高速浮点运算,须选择高速DSP芯片作为其核心部件.本文在基于海思Hi3519芯片的嵌入式开发平台上移植Linux系统,采用交叉编译方式运行车牌识别算法.本系统的主机和单板通过串口连接传输命令行以及回显嵌入式输出,同时使用以太网口或JTAG连接进行文件传输.交叉编译过程主要包括制作交叉编译工具、创建Linux环境、U-Boot移植、Linux内核编译、烧写镜像文件到SPI Flash等.
图4为基于DSP的嵌入式车牌识别系统软件设计流程.车牌识别(plate recognize)算法主要包括车牌检测(plate detect)和字符识别(chars recognize),前者负责定位源图像中的车牌信息并截取作为后者的输入.车牌检测包括车牌定位(plate locate)和车牌判断(plate judge)[8-10],进行车牌检测可以有效减少计算量,避免在视频流的无车帧中浪费计算时间.字符识别包括字符分割(chars segment)和字符判断(chars identify),字符分割将截取到的车牌图片切分为若干个仅包含单个字符的图片,并将其归一化处理为同样尺寸的待识别样本.目前字符识别技术已相当成熟,识别率较高,因此车牌识别算法的关键在于车牌定位的效果[11].
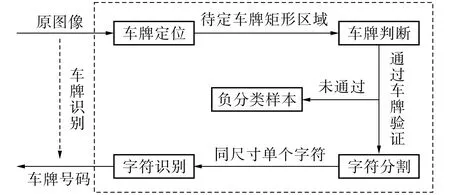
图4 基于DSP的嵌入式车牌识别系统软件流程图Fig.4 Software flow chart of the embedded license plate recognition system
4 PLC控制系统
PLC控制系统主要控制电机模块(控制车位板移动)、光电开关(检测空余车位)、限位开关(检测车位板位置)和安全装置,接收相应的传感器数据,针对ARM处理器发来的命令进行响应.根据PLC控制系统控制的节点数量和系统性能指标要求,本文选用欧姆龙CP1E-N60型号的PLC控制系统,其特点是运行稳定、功能强大、界面友好、易于编程,能使用HOST-LINK通信协议通过RS-485和RS-232与上位机进行通信.图5是PLC控制系统的内部接线情况.
图6是PLC控制系统软件的设计流程.PLC控制系统和用户直接交互,因此软件设计中确保安全性比算法效率更重要,一旦发生故障系统将直接暂停.另外,PLC控制系统设计相应的车位移动算法时,应尽量使车位挡板的升降耗能最小.
5 安装与测试
该系统在位于江苏省苏州市的某包含地上6层和地下2层的3列升降横移式立体车库进行系统实用化测试.在立体车库现场安装基于ARM的嵌入式控制系统控制箱、基于DSP的车牌识别摄像机、网络通信设备.系统的现场测试主要包括: ① PLC控制系统移动车位板、采集传感器数据、接收ARM控制系统命令的功能;② ARM控制系统与PLC控制系统、云平台的通信;③ 云平台分配车位、响应用户需求、诊断故障的功能.

图5 PLC控制系统内部接线图Fig.5 Internal wiring of PLC control system

图6 PLC控制系统软件设计流程图Fig.6 Software flow chart of PLC control system
测试过程中发现立体车库电机启动时回路电流较大,对整个系统产生较大干扰.因此根据现场实际情况,设计了抗电磁干扰的软硬件解决方案并取得预期效果.测试过程中,用户可以在云门户的用户界面查询到附近立体车库的车位情况,根据需要输入车牌号和手机号预订车位.然后用户可以借助云门户的导航服务到达预订车库,识别车牌后,智能控制器通过PLC系统把载车板移动到停车处,驾驶员将车辆停到指定车板,系统通过网络摄像头确定驾驶员安全离开后,控制PLC将车辆移动到分配的车位.取车时云平台根据停车时间计算费用,用户付款后智能控制器控制PLC取车.测试结果表明,该系统基本达到相应的技术指标要求.
该系统对于提升立体车库的智能化水平具有一定意义,通过简单改装就可以使现有的传统停车场完成智能化升级.后续研究将加大系统实用化测试力度,进一步提升系统的可靠性.