基于干扰观测器的小型无人直升机H∞飞行控制
2019-04-16梅蓉
梅 蓉
(南京森林警察学院侦查学院,南京 210023)
在人工智能技术大力发展的当今,无人机技术与系统得到了国内外学者的广泛研究.由于小型无人直升机具有重量轻、成本低、机动性能好等特点,使其成为研究热点[1].目前,小型无人直升机系统控制方法包括传统的PID控制[2]、自适应控制[3]、H∞控制、动态逆控制、受限控制[4]、Backstepping控制[5]、滑模控制[6]和LQR线性控制[7]等.为了有效处理无人直升机所受扰动带来的影响,国内外学者提出了不同的鲁棒抗扰飞行控制方法,方星等[8]采用干扰观测器对系统所受到的未知外部干扰进行了有效估计,并根据观测器的输出,在控制器中引入干扰补偿项,能有效消除外部扰动对控制系统性能的影响,证实了在小型无人直升机系统的飞行控制器设计中,引入干扰观测器技术可提高飞行控制的鲁棒性和安全性;He等[9]提出了一种基于干扰观测器和Backstepping方法的直升机鲁棒飞行控制方法,但干扰观测器难以有效处理系统所受到的噪声影响;周来宏等[10]在Backstepping控制方法的基础上,增加了误差积分和饱和函数,设计了积分饱和Backstepping控制策略,用于抵抗无人机飞行过程中受到的常值干扰和变值干扰.为了有效处理小型无人直升机系统受到的噪声影响,本文拟在干扰观测器的基础上,引入H∞控制方法,使干扰对系统的影响降到最低,并满足给定的性能指标.
1 动力学模型

(1)
(2)
其中g为重力加速度,τe为无人直升机挥舞运动的时间常数,Zlon和Zlat为周期变距到挥舞角的稳态增益,Au和Bv为系统参数,Ma为机俯仰力矩稳定导数,Lb为机滚转力矩稳定导数.为方便,模型可统一写为
(3)
其中x,y为系统的状态和输出,A为状态系数矩阵,C为输出矩阵,B为输入矩阵,Bn为噪声输入矩阵,u为系统输入,d和n分别为系统的未知时变干扰和环境噪声干扰.参数A,B,Bn的具体表达形式由式(1)和式(2)给出,C为相应维数的单位行向量.
为了给小型无人直升机设计基于干扰观测器的H∞控制方法,给出如下假设:

假设2系统(3)中所有状态变量均可测.
本文的控制目标是针对小型无人直升机系统(3)设计一种基于干扰观测器的H∞控制方法,使其在外部未知输入干扰和环境噪声作用下满足性能指标‖z‖≤γ‖n‖2,其中z为闭环系统状态,系统噪声干扰的减弱水平指标γ>0.
2 控制律设计


3 仿真结果

表1 小型无人直升机相关参数Tab.1 Related parameters of the small unmanned helicopter
在所设计的H∞飞行控制器作用下,小型无人直升机的飞行控制仿真结果见图1,2.从图1和图2可以看出,在输入干扰和外部噪声的影响下,尽管在初始时刻有较大的控制误差,但在控制器作用下实现了对输入干扰和外部噪声的抑制,最终实现了在输入干扰和外部噪声共同作用下的鲁棒抗扰控制.
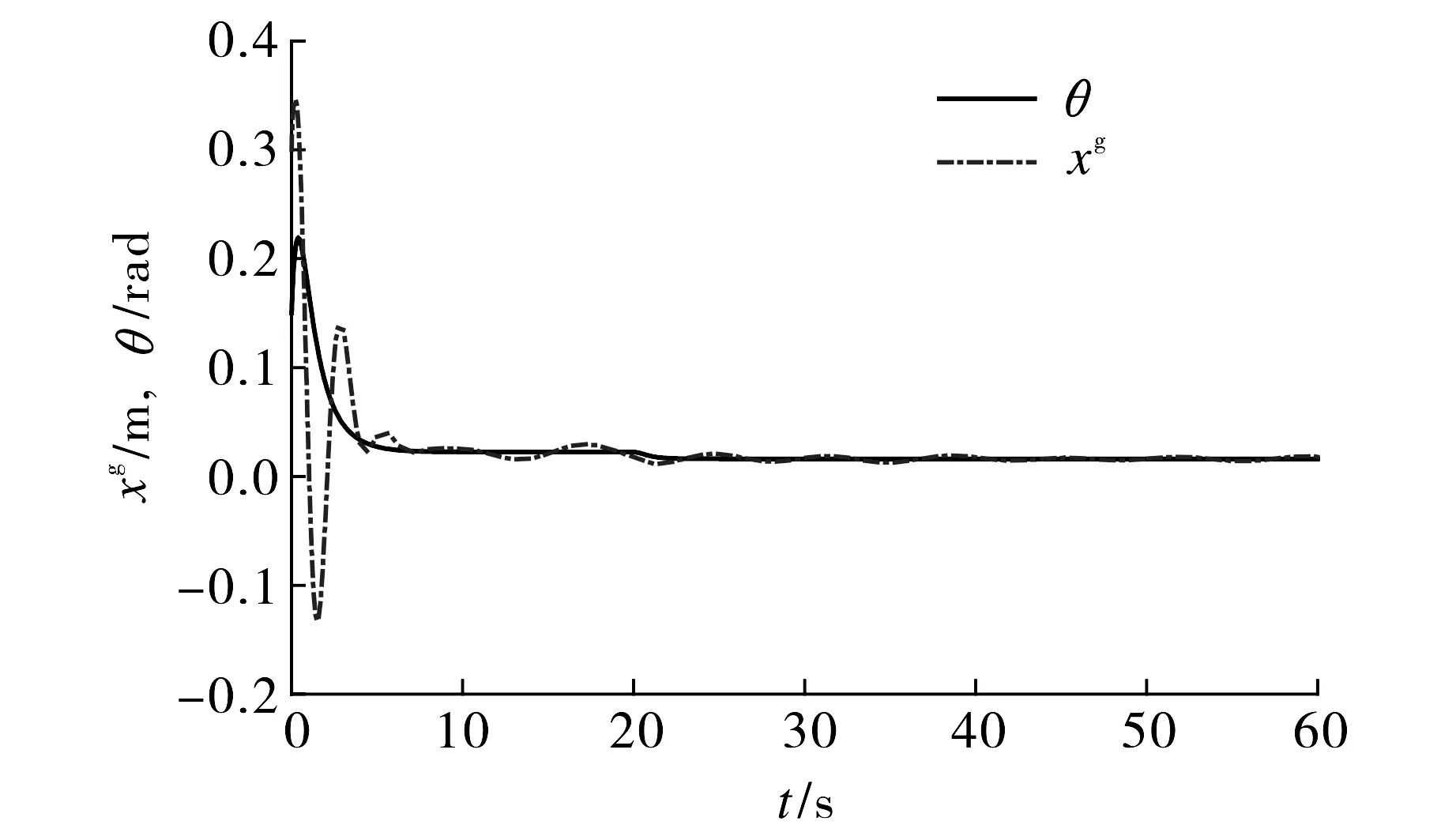
图1 小型无人直升机纵向控制结果Fig.1 Longitudinal control results of the small unmanned helicopter

图2 小型无人直升机横向控制结果Fig.2 Lateral control results of the small unmanned helicopter
4 结论
本文针对高阶、强非线性、强耦合、多输入、多输出的小型无人直升机系统,考虑输入干扰和外部噪声的影响,设计了一种基于干扰观测器的H∞控制方法.对由外部系统产生的未知时变输入干扰,设计了干扰观测器对其进行逼近.同时利用干扰观测器的逼近输出,设计了小型无人直升机的H∞控制器,实现了对输入干扰和外部噪声的良好鲁棒控制性能.