基于机器视觉的轮毂在线识别分类技术研究
2019-04-15郭智杰王明泉张俊生焦腾云
郭智杰, 王明泉, 张俊生, 焦腾云
(中北大学 信息与通信工程学院, 山西 太原 030051)
0 引 言
轮毂作为汽车的重要受力部件, 其质量的好坏直接关系到行车是否安全, 所以在生产过程中需要对轮毂进行缺陷检测[1]. 而在自动化缺陷检测过程中, 不同型号的轮毂所需的射线强度、 照射角度均不同, 但是在生产线上不同型号的轮毂混流生产. 所以轮毂型号的正确识别可以为轮毂自动化检测提供合适的尺寸、 辐条数目等参数, 使检测自动化得以实现. 目前, 厂家需要对生产的轮毂进行全检, 且自动化缺陷检测需要得到轮毂的尺寸等信息. 而传统的人工方式识别轮毂型号无法应对庞大的工作量, 长时间的工作也会导致准确率下降[2].
针对传统人工方式识别轮毂型号所存在的问题, 本文开发了一套基于OpenCV以及MFC平台的轮毂型号在线识别系统. 该系统能够自动识别生产线上的轮毂型号, 并且可以为自动化缺陷检测模块提供尺寸等参数信息, 经厂家测试验证, 该系统的识别准确率为98.7%.
1 数据采集及图像预处理
1.1 数据采集
选用型号为aca-2500-14gm的工业CCD相机获取轮毂图像, 镜头焦距4 mm; 选用红外光栅测高仪获得轮毂的高度信息. 同时为保证成像质量, 采用环形光源照明, 且相机采集范围内的传送带采用黑色不反光材质[3]. 最后使用机械定位装置以保证轮毂处于工业相机正下方, 可以在拍摄完整、 清晰轮毂图像的同时减少镜头畸变带来的影响.
1.2 图像预处理
尽管传送带采取了发黑处理, 但是经过轮毂长时间磨损, 仍不可避免地在一些边缘部位存在反光的现象, 如果直接对采集到的轮毂图像进行二值化处理, 会不利于后续的特征提取[4]. 因此, 必须在轮毂图像二值化前进行图像预处理. 在本文中, 用图像减法运算去除系统背景, 再使用形态学处理等方法去除轮毂边缘以及幅窗处的毛刺.
1.2.1 图像减法运算去除背景
图像减法也称为差分方法, 即对两幅图像上对应像素点处的灰度值进行减法运算. 本课题中利用含有轮毂的原始图像减去系统背景图像的方法, 去掉原图像中系统背景, 突出轮毂本身[5]. 设输入的原始图像和背景图像分别为A(x,y)和B(x,y), 输出图像为C(x,y), 则图像的减法运算为
C(x,y)=A(x,y)-B(x,y).
(1)
如图 1(a) 所示为含有轮毂的原始图像,
图 1(b) 是系统的背景图像, 可以将图 1(a) 理解为由背景图像 1(b) 和只含有轮毂的图像组合而成. 并且在采集过程中保持相机曝光一致的情况下,
图 1(a) 和图 1(b) 的中的背景部分灰度值几乎没有变化, 所以, 通过原始图像减去背景图像可以在提取轮毂的同时去除背景.
图 1(c) 是图 1(a) 减去图 1(b) 后的结果, 可以明显看出轮毂图像中大部分背景的干扰已经被去除.
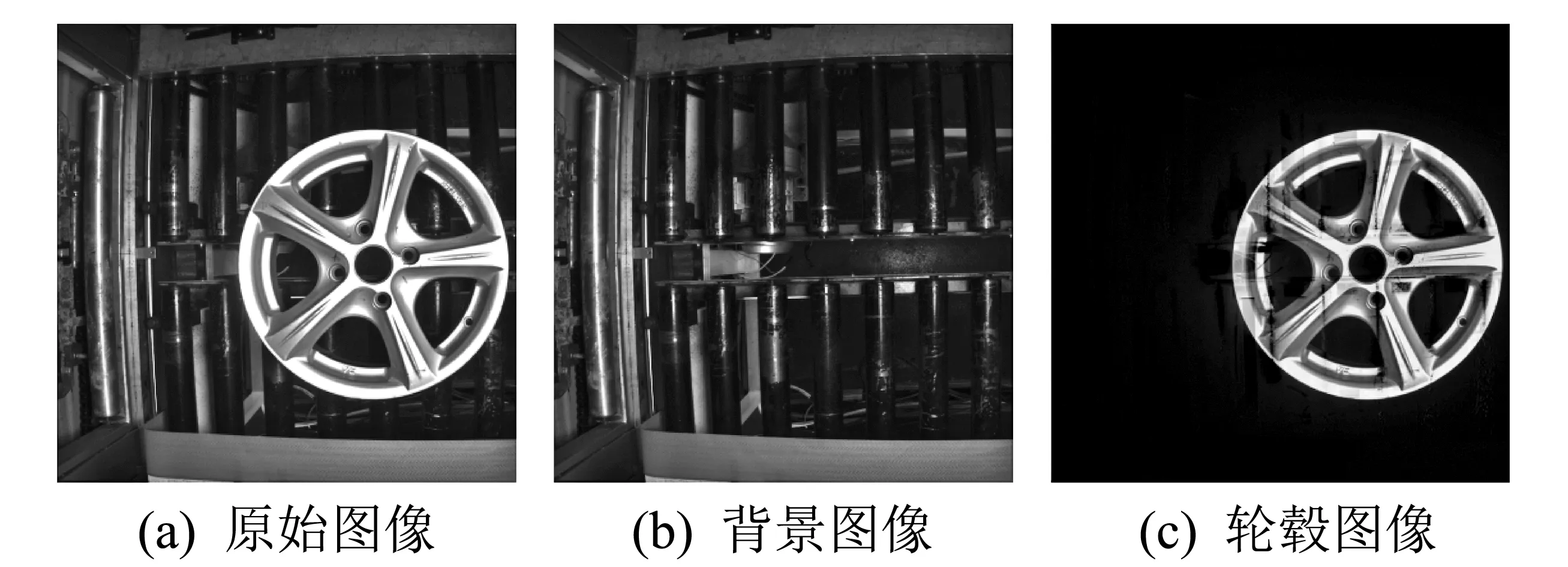
图 1 图像减法去除背景Fig.1 Image subtraction removes background
1.2.2 图像去噪
图 2(a) 为去除背景的轮毂图像, 因为轮毂边缘和幅窗毛刺的灰度值与轮毂图像的灰度值接近, 直接对轮毂图像二值化后会有干扰存在, 如图 2(b) 所示. 对此, 本文使用形态学中的开闭运算对二值化后的轮毂图像进行降噪.
开运算是先腐蚀后膨胀, 通常用于去除细小的物体图像、 平滑物体图像的边缘; 而闭运算则先膨胀后腐蚀, 通常用来填充目标图像中比结构元素小的空洞. 经过对轮毂二值化图像先开运算后闭运算的处理, 可以在对轮毂图像的微小毛刺进行处理的同时不会使轮毂图像的面积发生较大的变化. 经过多次实验, 本文采用9×9的矩形结构元素.
图 2(c) 为对图 2(b) 进行一次开闭运算的结果, 可以看出在幅窗内的干扰已经被全部去除.
2 轮毂图像的特征提取
在工业生产中, 轮毂型号由轮毂样式和尺寸参数俩部分组成. 例如轮毂型号SR483-1670, 前部分483代表的是轮毂样式, 通常由轮辐数目、 中心孔、 幅窗样式等决定; 后部分1670表示该轮毂的尺寸规格, 该轮毂直径为16英寸, 高度为7英寸. 所以本文提取的特征参数包括轮毂的高度、 直径、 轮辐数目、 中心孔直径以及幅窗的周长面积比.
2.1 轮毂尺寸参数的获取
2.1.1 轮毂高度的获取
红外线光栅用于工业自动化系统的高精度检测和测量, 常用于快递、 包装行业的箱体尺寸测量. 本课题通过红外光栅测高仪读取轮毂高度数据, 分辨率为10 mm, 如图 3 所示.

图 3 红外光栅读取轮毂高度Fig.3 Get the height of wheel hub by infrared grating
经过分析, 生产线上不同尺寸轮毂的高度最小间隔为0.5英寸, 即12.7 mm, 课题采用的光栅测高仪可以满足精度要求. 光栅采用RS485通信协议与上位机通讯, 上位机软件通过串行端口实时读取光栅测量的高度数据.
2.1.2 轮毂直径及圆心的获取
观察经过预处理后的轮毂二值图像可以发现, 轮毂边缘是图像中亮度突然变化的区域, 也是轮毂图像中最重要的特征, 为实现轮毂外形检测提供可靠的信息[6]. 边缘提取算子主要有Robert, Sobel, LOG和Canny等. 其中, Canny算子具有良好的信噪比、 检测精度、 噪声去除、 边缘细节保留等性能[7-10], 所以, 本文采用canny检测算子对经过预处理后的轮毂二值图像进行边缘提取, 结果如图 4(a) 所示. 随后通过OpenCV图形库中的findcounters()函数对提取的轮廓进行遍历筛选, 其中面积最大的轮廓便是轮毂的外轮廓圆, 如图 4(b) 所示. 最后需要对提取到的轮毂外轮廓拟合半径及圆心.

图 4 提取轮廓Fig.4 Extract contour
因为边缘检测所提取到的轮毂外轮廓边缘非常细, 并且紧密相连的像素点组成了轮毅的外轮廓圆[11]. 由于圆上任意不共线的3点确定唯一的一个圆, 所以选取所提取轮廓中不共线的3个点p1(x1,y1),p2(x2,y2),p3(x3,y3), 设圆心坐标为p0(x0,y0), 半径为r, 那么这3点应满足式(2)方程组
(2)
解方程组可得
(3)

(4)

(5)
2.1.3 系统标定
经过上文处理得到的是以像素为单位的轮毂外轮廓圆半径, 下一步需要建立轮毂图像的像素尺寸与实际物理尺寸之间的对应关系, 即像素当量[12]. 像素当量指的是在图像中一个像素所代表的实际物理长度. 假设物体实际物理长度为s, 在图像上占有的像素量为p时, 此时像素当量m为s/p.
针对轮毂尺寸参数的测量, 本系统选择了畸变小的光学镜头, 所以系统成像模型可以近似为针孔模型. 成像面、 光轴和光心是针孔模型的主要组成部分, 焦距为光心到像面的距离, 物距为光心到物面的距离. 而实际的拍摄系统常由透镜组合而成, 其中的物距、 像距和焦距满足高斯成像公式
(6)
式中:f为焦距;u为物距;v为像距. 但是在针孔成像中焦距等于像距, 而在透镜成像中, 焦距并不等于像距. 但两者的成像关系是一致的, 均满足像点是物点与光心的连线与图像平面的交点[13]. 所以, 在本课题的拍摄系统中, 可以采用针孔模型作为成像模型.

对生产线上所有高度的轮毂分别进行标定后, 将各高度下的像素当量保存至上位机. 在后续轮型识别过程中, 识别系统首先通过光栅自动读取待测轮毂高度, 随后调用该高度下的像素当量, 完成轮毂外轮廓圆直径从像素长度到物理长度的转换. 该标定方法易于操作且精度高, 常用于拍摄对象较稳定, 不经常更换的视觉测量系统.
2.2 轮毂图像特征提取
2.2.1 轮辐个数及中心孔的获取
图 5 所示为轮辐个数的提取过程, 首先以外轮廓圆圆心(A,B)为圆心做同心圆环, 然后与预处理后的二值图像做与运算, 与运算结果所得到的轮廓数目即为轮辐个数, 如图 5(c) 所示. 经过大量试验, 选取同心圆环的内外径分别为0.45r和0.5r, 其中r为上文中计算得到的轮毂外轮廓圆半径.
中心孔的边缘轮廓可从经过canny检测(见图 4(a))的图像中获得. 在提取过程中需要对轮廓进行筛选, 剔除干扰轮廓. 筛选方法为: 以外轮廓圆圆心(A,B)为圆心, 选取直径最小的轮廓圆, 即为中心孔的轮廓圆.

图 5 获取轮辐个数Fig.5 Get the number of spokes
2.2.2 幅窗周长、 面积的获取
对于不同类型的轮毂, 幅窗形状也各不相同. 由于幅窗的形状具有旋转不变性, 所以在本课题中使用幅窗的周长、 面积以及周长与面积的比值来表征各类幅窗的形状.
面积和周长均是幅窗形状的度量. 面积只与幅窗的边界有关, 而与其内部灰度值的变化无关; 周长在区别简单和复杂形状区域时有较好的效果[14]. 而周长和面积的比值是描述形状的参数, 当形状为圆形时, 周长与面积比最小; 当形状为长条状时, 周长与面积比加大, 所以本课题通过提取幅窗的周长面积比来识别分类不同种类的轮毂幅窗.
3 轮毂识别分类
识别模块主要包括识别分类和学习功能, 其中对于标准类型库中不存在的新类型能够提示用户是否加入类型库中, 以便于下次能够识别该类型的轮毂. 鉴于传统的轮毂分类方法如投票分类法和支持向量机的方法对于生产线上出现的新轮型都需要先对新的轮毂进行取样, 随后训练样本并最终在模板库中进行识别, 而这将会花费大量的时间. 而在生产过程中, 轮毂在线缺陷监测流程要求对轮毂进行全检, 故传统的识别方法无法适用.
本课题轮毂识别的基本思想是对采集到的轮毂特征参数生成特定序列号的方法来表示不同型号[15]. 例如, 在本文中对图 2(a) 所示的轮毂进行特征提取后生成序列号为15r#80h#8f#60z#0.026 5b, 表示该轮型直径15英寸、 高度8英寸、 辐条数目为8、 中心孔直径为60 mm、 幅窗周长面积比为0.026 5. 随后根据这段序列在模板库中比对查找, 若无此序列号, 将该新轮型的序列号以及型号输入保存到模板库中, 完成学习功能; 若数据库中有同样序列号, 则输出该序列号所对应的轮毂型号, 完成识别功能. 其中数据库的读写通过.ini格式的配置文件完成. 这样做的好处是操作系统不必安装较大的数据库, 也便于程序的安装, 达到在线检测要求的实时性.
4 结 语
本课题采用OpenCV和MFC平台, 开发了一套基于机器视觉的轮毂型号在线识别分类系统. 针对现场环境复杂成像噪声多的问题, 分别使用图像减法和形态学运算来去除系统背景和降噪; 针对不同型号的轮毂高度不同, 使用标准工件即轮毂作为标定参照物对拍摄系统进行标定; 针对不同类型的轮毂幅窗形状多变, 提取幅窗的周长面积比作为特征参数对幅窗进行分类. 最后通过对轮毂图像生成序列号的方法将待检轮毂所提取的特征与数据库中轮毂的标准特征进行比对, 满足了轮毂的在线识别分类要求. 该系统很好地完成了厂家的在线识别分类要求, 为轮毂缺陷检测的自动化提供了保障.
