二自由度碰振准哈密顿系统双碰周期解的Melnikov方法
2019-04-13张思进刘喻吉德三
张思进 刘喻 吉德三

摘 要:采用摄动法和Poincaré映射方法推导出了具有立方非线性项和外部激励项的二自由度碰振系统周期解的扩展Melnikov函数,并运用该Melnikov函数研究了二自由度碰振系统的双碰周期解特性,确定了系统稳定双碰周期2运动的存在条件,即在参数域内的一条临界曲线.通过数值模拟验证,结果表明:该临界曲线下方区域参数是双碰周期2运动,上方区域参数是非双碰周期2运动;当保持其他参数不变,仅增加系统激励幅值f时,系统的运动状态会从多碰多周期运动逐步向双碰周期2运动转变;当保持其他参数不变,仅增加系统恢复系数η0时,系统的运动状态会从双碰周期2运动逐步向多碰多周期运动转变.
关键词:碰振系统;Melnikov方法;双碰周期2运动;Poincaré映射;扩展Melnikov函数
中图分类号:O322 文献标志码:A
Melnikov′s Method of Periodic Solutions with Double Impacts for
a 2-DOF Vibro-impact Quasi-Hamiltonian System
ZHANG Sijin1,LIU Yu1,JI Desan2
(1. College of Mechanical and Vehicle Engineering, Hunan University,Changsha 410082,China;
2. College of Science,Wuhan University of Science and Technology,Wuhan 430065,China)
Abstract: Perturbation method and Poincaré mapping method were used to derive the generalized Melnikov function of the periodic solution for a two-degree-of-freedom vibro-impact system with cubic non-linearity and external excitations. By using the Melnikov′s method, the characteristics of periodic motions with double-impact of the 2-dof system were studied, and the existence condition of period-2 motions with double-impact was determined as a critical curve in the parameter domain. The results of numerical simulations show that the regions below the critical curve are the period-2 motions with double-impact, the upper regions of the critical curve are not period-2 motions with double-impact;Meanwhile,increasing the force amplitude and keeping the other parameters unchanged, the motion state of the system changes from multi-period motions with multi-impact to period-2 motions with double-impact, while increasing the system restitution coefficient and keeping the other parameters unchanged, the motion state of the system changes from period-2 motions with double-impact to multi-period motions with multi-impact.
Key words: vibro-impact system; generalized Melnikov′s method;period-2 motion; Poincaré maping; generalized Melnikov′s function
在实际工程系统中往往存在碰撞、沖击、干摩擦、变刚度、开关、阈值等大量非光滑因素,人们致力于研究力学系统中这些非光滑因素带来的复杂动力学行为.非光滑动力系统通常表现出与光滑动力学系统截然不同的特征,例如: 加周期分岔、擦边分岔、粘滞分岔和C型混沌吸引子等.学者们[1-8]建立了非光滑动力学系统定性理论(例如脉冲微分方程理论、微分包含理论、非光滑分岔理论等),它们在分析非光滑系统的分岔、混沌以及运动复杂性上发挥了重要作用.
碰撞振动(简称碰振)系统是一类典型的非光滑动力系统.针对这类系统早期的研究对象是冲击消振器,该类系统一般为有挡板的单自由度碰撞振动系统.后来逐步发展为多自由度碰撞振动系统.Chávez等[9]研究了两自由度的Jeffcott转子的非光滑动力学模型,在过载及粘性阻尼的共同作用下的复杂动力学特性.Xu等[10]研究了两自由度振动冲击系统发生擦边运动的存在性和稳定性,并比较了两自由度的Poincaré图与原微分方程模拟图,证明了不连续映射方法的有效性.Al-Shudeifat等[11]研究了加装非线性能量阱(NES)的二自由度振动系统在单边振动冲击下的响应机制,着重探索了NES对系统振动的抑制以及系统内的靶向能量传递(TET)特性.Luo等[12]研究了带间隙的二自由度周期强迫系统的动态性能与系统参数之间的关系.
近年來,不少学者开始应用Melnikov方法来研究碰振系统的同宿轨道、亚谐周期运动、全局分岔乃至混沌运动等动力学特性.Zhang等[13]将Melnikov方法应用于碰振准哈密顿系统的局部亚谐轨道,推导出了局部亚谐轨道的Melnikov函数.Du等[14]以碰撞倒摆为模型,提出了一种同宿轨道与刚性面相切的非光滑同宿分岔的Melnikov方法.Yagasaki[15]将扩展的分段光滑系统的次谐Melnikov函数应用于三线性振动器模型.更多非光滑系统的Melnikov方法参见文献[16-19].
本文运用摄动法和Poincaré映射方法推导了二自由度准哈密顿碰振振子系统双碰周期2运动的Melikov函数.此函数可以确定双碰周期2运动和非双碰周期2运动的参数区域,并通过数值模拟验证了该分析方法的正确性.
1 非光滑准哈密顿系统的描述
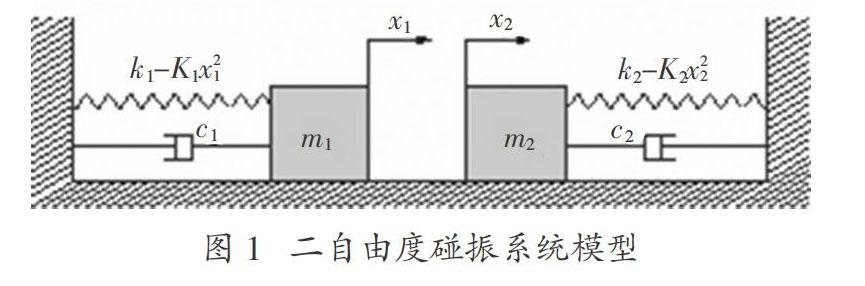
考虑以下二自由度非线性碰振振子(图1),当 时,两质量块非碰振运动的控制方程为:
忽略碰振瞬间两质量块的位移改变,当x1 - x2 = δ时发生完全弹性碰撞;由于碰振过程中动量守恒和能量守恒,有:
以上两式中:ε表示O(1)小量分别表示碰振前和碰振后的速度;f(x)表示单位质量块上作用的恢复力,εg1(t)是周期为T 的周期性激励函数;1-εη0∈(0,1]表示碰振恢复系数;δ是质量块m1与质量块m2之间的间隙.
方程(1)和(2)可以改写为如下矢量形式:
该扰动系统(3)则被称为准哈密顿碰振系统.其中,
{X1,X2} = {x1,y1,x2,y2}
JDH1(X1) = {?坠H1/?坠y1,-?坠H1/?坠x1}
JDH2(X2) = {?坠H2/?坠y2,-?坠H2/?坠x2}
G1(X1,t) = {0,g1(x1,y1,t)}
G2(X2,t) = {0,g2(x2,y2,t)}
当ε=0时,方程(3)可以表示为(所谓未扰系统):
为了研究在外部激励和粘性阻尼作用下的二自由度碰振系统(1)双碰周期运动的存在性,我们将通过分析手段构建双碰周期2运动的广义Melnikov函数.
2 碰振准哈密顿系统双碰周期的Melnikov
函数
方程(4)描述的未扰系统碰振过程一般比较复杂,为便于分析,这里仅考虑两质量块碰撞面是固定的情形.引入以下假设:
1)方程(4)有一簇周期轨道,可以表示为L1=
2)Xh11 (t)和Xh22 (t)的周期分别为T1(h1)和
T2(h2);
3)共振关系应该满足以下条件
这里Mj和nj (j=1,2)是互质整数.
研究扰动系统(3)的双碰周期2运动,其轨道如图2所示.由于方程(3)中的两个表达式类似,这里我们仅分析前一个方程的扰动轨道,可以用同样的方法分析第二个方程.
当x1 - x2 小于δ时,扰动轨道Xε(t,t0)是光滑的,因此可以将其展开成泰勒级数的形式,如下:
Xε(t,t0,ε) = Xα(t - t0) + εX(1)(t,t0) + O(ε2) (6)
式中,Xα(t)表示未扰轨道表达式.
为了便于分析,定义以下算子:
Δ(t,t0) = F(Xα(t - t0))∧Xα(t,t0) (7)
Δ0(t,t0) = F(Xα(t - t0))∧Xε(t - t0) (8)
Δ1(t,t0) = F(Xα(t - t0))∧X(1)(t - t0) (9)
光滑条件下,我们可以得到:
Δ1(t,t0) = F(Xα(t - t0))∧H(Xα(t - t0),t) (10)
这里∧表示楔形算子.
接下来,我们考虑始于截面经过mT时间后返回到该截面的扰动轨迹Xε(t,t0).Poincaré截面上起始点和返回点间的距离(见图2)可以通过下式计算,得:
d(t0)==
[Δ(t0+mT,t0)-Δ(t0,t0)]/DH(Xα(0))
(11)
双碰周期2运动的Melnikov函数定义为:
Mm(t0) = Δ1(t0 + mT,t0) - Δ1(t0,t0) (12)
将方程(12)改写为以下分段表达的形式:
Mm(t0)=Δ1(t0+mT,t0)-Δ1(t0,t0)=
=Δ1(t0+mT,t0)-Δ1(tε 2,-,t0)+
Δ1(tε 2,-,t0)-Δ1(tε 1,+,t0)+Δ1(tε 1,+,t0)-Δ1(tε 1,-,t0)+
Δ1(tε 1,-,t0)-Δ1(t0,t0) (13)
然后,将方程(9)对时间t求导,得:
dΔ1(t,t0)/dt=DH(Xα(t-t0))·G(Xα(t-t0),t)(14)
在积分区间[t0,tε 1,-]内积分,并结合分段表达式Xα-(t-t0),可得:
Δ1(tε 1,-,t0)-Δ1(t0,t0)=
H(Xα-(t-t0))·G(Xα-(t-t0),t)dt(15)
假設tε 1,±,tα 1,±,tε 2,±,tα 2,±分别是扰动轨道和非扰动轨道到达碰撞面x1 - x2 = δ的时刻,将表达式tε ±在未扰轨道碰振时间tα ±处展开,得:
tε 1,± = tα 1,± + εt1 1,± + O(ε2) (16)
将式(16)代入式(15),得
Δ1(tε 1,-,t0)-Δ1(t0,t0)=
)
类似地,在区间[tε 1,+,tε 2,-]内积分方程(14),得
Δ1(tε 1,+,t0)-Δ1(tε 2,-,t0)=
)
由式(16)易知下式成立:
Δ1(tε 1,+,t0)-Δ1(tε 1,-,t0)=Δ1(tα 1,+,t0)-Δ1(tα 1,-,t0)+O(ε)
(19)
将式(17)~(19)代入式(13),得到
Δ1(tα 1,+,t0)-Δ1(tα 1,-,t0)+Δ1(tα 2,+,t0)-Δ1(tα 2,-,t0)+O(ε)
(20)
接下来,将表达式Δ1(tα 1,+,t0)-Δ1(tα 1,-,t0)运用泰勒公式展开,并结合方程(6)和定义算子(7)~(9),易知:
Δ(tα 1,+,t0)-Δ(tα 1,-,t0)=Δ0(tα 1,+,t0)-Δ0(tα 1,-,t0)+
ε[Δ1(tα 1,+,t0)-Δ1(tα 1,-,t0)]+O(ε2)(21)
注意到未扰轨道是封闭的,所以
Δ0(tα 1,+,t0)-Δ0(tα 1,-,t0)=0(22)
因而,Δ1(tα 1,+,t0)-Δ1(tα 1,-,t0)≈[Δ(tα 1,+,t0)-Δ(tα 1,-,t0)]/ε.又根据算子定义:
Δ(tα 1,+,t0)-Δ(tα 1,-,t0)=
[f1(Xα1(tα 1,+-t0)Xε1(tα 1,+,t0))+
(Yα1(tα 1,+,t0)-Yα2(tα 1,+,t0))(Yε1(tε 1,+,t0)-Yε2(tε 1,+,t0))]-
[f2(Xα1(tα 1,--t0)Xε1(tα 1,-,t0))+
(Yα1(tα 1,-,t0)-Yα2(tα 1,-,t0))(Yε1(tε 1,-,t0)-Yε2(tε 1,-,t0))]
(23)
将上式中Xε(tε 1,±,t0)在时间tα±处做泰勒展开,
如下:
Xε1(tα 1,±,t0)=Xα1(tε 1,±,t0)-εYα1(tα 1,±-t0)t1 1,±+O(ε2)Yε1(tα 1,±,t0)=Yα1(tε 1,±,t0)+εf1(Yα1(tα 1,±-t0))t1 1,±+O(ε2)
(24)
以上分析了两质量块未发生接触时,质量块m1的运动轨线部分(碰撞面右边部分);类似可得质量块m2的亚谐运动轨线表达式,这里不再详细描述.
下面我们重点分析两质量块发生碰振瞬间(23)式的具体计算.根据碰撞法则两质量块应在同一时刻到达碰撞面处,因此对于两质量块的扰动和未扰动轨道,下列关系式显然成立:
tε 1,+ = tε 1,-Xε1(tε 1,+,t0)=Xε1(tε 1,-,t0)Xε2(tε 1,+,t0)=Xε2(tε 1,-,t0)Yε1(tε 1,+,t0)-Yε2(tε 1,+,t0)= -(1-εη0)(Yε1(tε 1,-,t0)-Yε2(tε 1,-,t0))
(25)
tα 1,+ = tα 1,-Xα1(tα 1,+-t0)=Xα1(tα 1,--t0)Xα2(tα 1,+-t0)=Xα2(tα 1,--t0)Yα1(tα 1,+,t0)-Yα2(tα 1,+,t0)= -(Yα1(tα 1,-,t0)-Yα2(tα 1,-,t0)) (26)
类似地,展开表达式Yε(tε 1,±,t0),得:
Xε2(tα 1,±,t0)=Xα2(tε 1,±,t0)-εYα2(tα 1,±-t0)t1 1,±+O(ε2)Yε2(tα 1,±,t0)=Yα2(tε 1,±,t0)+εf2(Yα1(tα 1,±-t0))t1 1,±+O(ε2)
(27)
将(24)-(27)式代入(23)式并结合(16)式,可知:
Δ(tα 1,+,t0)-Δ(tα 1,-,t0)=
(Yα1(tα 1,+,t0)-Yα2(tα 1,+,t0))(Yε1(tε 1,+,t0)-Yε2(tε 1,+,t0))-
(Yα1(tα 1,-,t0)-Yα2(tα 1,-,t0))(Yε1(tε 1,-,t0)-Yε2(tε 1,-,t0))=
-εη0(Yα1(tα 1,-,t0)-Yα2(tα 1,-,t0))(Yε1(tε 1,-,t0)-Yε2(tε 1,-,t0))
(28)
又因为:
Yε1(tε 1,-,t0)-Yε2(tε 1,-,t0)=Yα1(tα 1,-,t0)-Yα2(tα 1,-,t0)+O(ε)
(29)
重新整理方程(28)得
Δ(tα 1,+,t0)-Δ(tα 1,-,t0)=
-εηε2)
(33)
注意到t
3 双碰周期运动Melnikov函数的应用
3.1 准哈密顿系统模型
以前面(图1)给出的碰振准哈密顿机械动力学模型为例,此处的两质量块分别用非线性弹簧k1 - K1x21和k2 - K2x22以及阻尼系数为c1和c2的线性阻尼器连接在一起.设两质量块分别作用幅值为F1和F2,频率为Ω简谐力.系统运动微分方程如下:
r是碰振恢复系数.为便于分析,考虑弱阻尼小激励条件下,将方程(36)和(37)的无量纲形式可以分别化简如下:
x″1 + 2εμ1 x′1 + ω21x1 - α1x31= εf1 cosΩ 0τx″2 + 2εμ2 x″2 + ω22x2 - α2x32= εf2 cosΩ 0τ(38)
x′+1 + μm x′+2 = x′-1 + μm x′-2 x′+1 - x′+2 = -(1 - εη0)(x′-1 - x′-2 )(39)
这里
3.2 准哈密顿周期轨道分析
将方程(36)改写成如下形式:
x′1 = y1,y′1 = -ω21x1 + α1x31 + ε(-2μ1y1 + f1cosΩτ)
(40)
x′2 = y2,y′2 = -ω22x2 + α2x32 + ε(-2μ2y2 + f2cosΩτ)
(41)
当ε=0时,未扰系统(40)和(41)为Hamilton系统,其哈密顿作用量为:
(44)
L
(45)
此处的dn(·),cn(·),sn(·)均为椭圆函数.
如果未扰系统没有发生碰振,那么周期轨道的周期可以表示为
Tα(k类椭圆积分.
然而,碰振会导致周期轨道破裂,碰振后的轨道周期为:
T(k) = Tα(k) - ΔT (47)
式中ΔT为完整轨道穿越切换面的时间,它可以由解除條件来确定:
由于考虑的是周期二运动,且1 ∶ 1的内共振情况,结合公式(5),即1,可得:
2T0(k) - 2ΔT = 2T (49)
方程(48)和(49)可用于确定周期 的未扰轨道的椭圆模量.
将公式(44)~(45)代入(35),得:
M2((51)
其中:
Z1 )dτ+
,+cosΩ(τ+τ0)+y2,+cosΩ(τ+τ0))dτ.
根据Melnikov理论,如果扰动系统(40)~(41)存在周期轨道,那么M(τ0)存在简单零点,因此可得双碰周期2运动存在的必要条件:
-2Z1μ - 4η0Z2 + fZ3(τ0)max ≥ 0 (52)
将参数μ = 0.1,ω = 2,Ω = 3,δ = 2,代入公式(52),可得系统激励幅值和恢复系数间的关系:
2.813 4 f - 9.964 8 - 3.2η0 ≥ 0(53)
3.3 数值仿真
方程(53)确定的临界线将参数(f,η0)分为上下两个部分:临界线下方区域是双碰周期2运动,临界线上方的区域均为非双碰周期2运动.为了验证这一结论,取点A到点F(如图3)六个不同系统参数来进行模拟.图4~图10是图3中各点对应运动的相图,实线与虚线分别代表质量块m1和质量块m2的运动状态,其余参数取值:α1 = 0.1,α2 = 0.3,μm = 1.
图4中(a)~(b)分别是系统在A点参数下运动的运动相图.从图中可以看出,系统表现为双碰周期2运动.同样位于临界线下方的B点和C点也表现出相似的双碰周期2运动,其相对运动相图见图5和图6.
取临界线上方点D和F验证时,系统运动可能表现为三碰周期3的,也可能表现为四碰周期4的,甚至变为复杂的多周期多碰运动.其相对运动相图见图7和图8.
当固定参数f = 7不变时,εη0从0.25(B点)逐渐增大到0.6(H点),中间经过εη0 = 0.4(E点),系统由双碰周期2运动变为三碰周期3,最后又变为多周期的多碰运动.E点和H点的相图如图9和
当固定参数εη0 = 0.4不变时,f从6(G点)逐渐增大到9(C点),中间经过f = 7(E点),系统由二碰周期2运动逐步变为多周期多碰运动.G点的相对运动相图见图11.
4 结 论
本文应用改进的局部亚谐Melnikov方法来研究具有立方项和外部激励的二自由度非线性准哈密顿碰振系统的双碰周期运动特性.通过分析,构建了双碰周期2运动的Melnikov函数,得到了双碰周期2运动的存在条件.该条件将系统的参数区域分为双碰周期2运动参数区域和非双碰周期2参数区域两部分.最后通过数值模拟验证了Melnikov方法分析二自由度碰振系统双碰周期2运动的有效性.
此外数值结果还表明,当保留其他参数不变,仅增加力f时,系统由多碰多周期运动,经过三碰周期3运动,最后达到双碰周期2运动.同样地,当保留其他参数不变,仅增加η0时,系统由双碰周期2运动逐步变为多碰多周期运动.故可适当控制参数 f和参数η0的取值,使系统尽量避免复杂的高频振动.
参考文献
[1] TIAN R L,ZHAO Z J,YANG X W,et al. Subharmonic bifurcation for a nonsmooth oscillator[J]. International Journal of Bifurcation & Chaos,2017,27(10):1750163.
[2] SHEN J,LI Y,DU Z. Subharmonic and grazing bifurcations for a simple bilinear oscillator[J]. International Journal of Non-linear Mechanics,2014,60(2):70—82.
[3] 張思进,杜伟霞,殷珊. 振动筛系统双Hopf分岔的反控制[J]. 湖南大学学报(自然科学版),2017,44(10):55—61.
ZHANG S J,DU W X,YIN S. Anti-control of double Hopf bifurcation of vibration rating griddle system[J]. Journal of Hunan University(Natural Sciences),2017,44(10):55—61.(In Chinese)
[4] WU Q,COLE C,LUO S,et al. A review of dynamics modeling of friction draft gear[J]. Vehicle System Dynamics,2014,52(6):733—758.
[5] 范新秀,王琪.车辆纵向非光滑多体动力学建模与数值算法研究[J]. 力学学报,2015,47(2):301—309.
FAN X X,WANG Q. Research on modeling and simulation of longitudinal vehicle dynamics based on non-smooth dynamics of multibody systems[J]. Chinese Journal of Theoretical & Applied Mechanics,2015,47 (2),301—309.(In Chinese)
[6] CAO D,CHU S,LI Z. Study on the non-smooth mechanical models and dynamics for space deployable mechanisms[J]. Chinese Journal of Theoretical & Applied Mechanics,2013,45(1):3—15.
[7] KUKUCKA P. Melnikov method for discontinuous planar systems[J]. Nonlinear Analysis Theory Methods & Applications,2007,66(12):2698—2719.
[8] SHEN J,DU Z. Heteroclinic bifurcation in a class of planar piecewise smooth systems with multiple zones[J]. Zeitschrift Angewandte Mathematik Und Physik,2016,67(3):1—17.
[9] CHáVEZ J P,WIERCIGROCH M. Bifurcation analysis of periodic orbits of a non-smooth Jeffcott rotor model[J]. Communications in Nonlinear Science & Numerical Simulation,2013,18(9):2571—2580.
[10] XU J,LI Q,WANG N. Existence and stability of the grazing periodic trajectory in a two-degree-of-freedom vibro-impact system[J]. Applied Mathematics & Computation,2011,217(12):5537—5546.
[11] AL-SHUDEIFAT M A,WIERSCHEM N,QUINN D D,et al. Numerical and experimental investigation of a highly effective single-sided vibro-impact non-linear energy sink for shock mitigation[J]. International Journal of Non-linear Mechanics, 2013,52(6):96—109.
[12] LUO G W,ZHU X F,SHI Y Q. Dynamics of a two-degree-of freedom periodically-forced system with a rigid stop: Diversity and evolution of periodic-impact motions[J]. Journal of Sound & Vibration,2015,334(334):338—362.
[13] ZHANG S J,WEN G L,WANG Y. The Melnikov′s method for local-subharmonic orbits of a vibro-impact quasi-Hamiltonian system[J]. Journal of Vibration Engineering,2016,29(2):214—219.
[14] DU Z,LI Y,SHEN J,et al. Impact oscillators with homoclinic orbit tangent to the wall[J]. Physica D Nonlinear Phenomena,2013, 245(1):19—33.
[15] YAGASAKI K. Application of the subharmonic Melnikov method to piecewise-smooth systems[J]. Discrete and Continuous Dynamical Systems,2013,33(5):2189—2209.
[16] 張思进,文桂林,王紧业,等. 碰振准哈密顿系统局部亚谐轨道的Melnikov方法[J]. 振动工程学报,2016,29(2):214—219.
ZHANG S J,WEN G L,WANG J Y,et al. The Melnikov′s method for local-subharmonic orbits of a vibro-impact quasi-Hamiltonian system[J]. Journal of Vibration Engineering,2016,29(2):214—219.(In Chinese)
[17] XU W,FENG J,RONG H,et al. Melnikov′s method for a general nonlinear vibro-impact oscillator [J]. Nonlinear Analysis, 2009, 71(1):418—426.
[18] GRANADOS A,HOGAN S J,SEARA T M. The Melnikov method and subharmonic orbits in a piecewise smooth system[J]. Siam Journal on Applied Dynamical Systems,2012,11(3):801—830.
[19] TIAN R L,ZHAO Z J,YANG X W,et al. Subharmonic bifurcation for a nonsmooth oscillator[J]. International Journal of Bifurcation & Chaos,2017,27(10):1750163.
