调相机无功调节在弱电网侧应用分析
2019-04-11刘丽娜代海涛陈大庆陈洪萍
刘丽娜,代海涛,陈大庆,陈洪萍
(国网山东省电力公司检修公司,山东 济南 250118)
0 引言
随着特高压直流远距离输电技术的推广应用,国家电网公司电网资源优化配置能力显著提高。随着直流输电距离越来越远,负荷中心受电比例不断增高,“强直弱交”现象日益明显,位于负荷中心的受端站接入的交流电网相对直流输电系统逐渐减弱,短路容量降低;直流送端的换流站往往接入到“长链式”交流电网中,随着风能、太阳能等新能源的接入,送端缺乏常规能源的支撑,系统短路容量也降低。系统短路容量降低带来一系列问题:动态无功补偿不足;电压稳定问题突出;受端直流换相失败比率增加等。由于受端换相失败会存在送端交流系统电压大幅度跌落,风机大面积脱网等风险。
换流站侧无功补偿设备的装设影响换流站与交流系统的无功平衡和交流系统电压水平。目前我国已建换流站普遍采用的无功补偿设备是机械投切的电容器和电抗器。由于无功补偿设备受交流系统电压的影响很大,薄弱电网由于电压稳定问题突出,该无功补偿设备的缺陷日益凸显。由于调相机具有动态无功补偿能力和提高系统短路容量以及无功调节受电网电压影响较小的优势,推荐其在弱电网侧的换流站应用[1]。
1 调相机简介
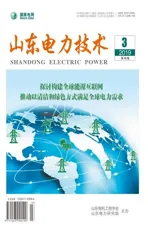
同步调相机(又称同步补偿机)是一种无功补偿设备,是运行于电动机状态、向电力系统提供或吸收无功功率的同步电机,不带机械负载和原动机。调相机主要运行在空载、进相、迟相(强励)3种工况,如图1 所示[2]。
空载:调相机向电网既不吸收无功也不发出无功的运行方式。
进相:随着励磁电流降低,调相机向电网吸收无功的运行方式。
迟相:随着励磁电流增加,调相机向电网发出无功的运行方式。
强励:迟相的一种工况,调相机励磁电压快速变大,励磁电流迅速增加的过程,强励励磁电流一般为额定励磁电流的数倍。
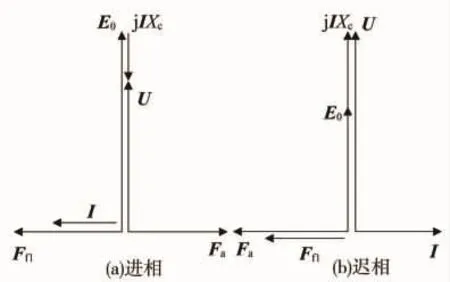
图1 调相机相量图
调相机的无功传输取决于E0与U是否相等。一般调相机并入电网后,在额定励磁状态下,E0=U,此时调相机既不发出也不吸收无功。影响无功传输大小的因素是E0和U,增大E0或减小U都会增大无功发出。E0的大小取决于励磁电流大小,从而也可以得出励磁电流直接影响无功的传输。
励磁系统无功调节。励磁系统通过调节励磁电流If来改变转子直轴上的励磁磁通,进而改变定子上的感应电动势E0大小。If的变化影响定子侧的感应电动势E0或转子的直轴磁场,定子侧的端电压U影响定子绕组电流产生的旋转磁场。转子能够稳定旋转的条件是:定转子在直轴上的磁场大小相等、方向相反。额定励磁对应E0=U,此时励磁电流If为额定励磁电流 If0。 如果 If>If0,E0会增大,此时要想维持定、转子在直轴上的磁场大小相等、方向相反,就必须在定子绕组流过去磁效应的电流,该电流为容性电流,对应的电势设为A,使E0+A=U,对应机组发出无功如图2所示。去磁效应A越大,说明发出无功越大。如果此时发出的无功正好等于负荷吸收的无功时,端电压U不变(参考无功静态电压特性图)。需要维持电网电压U为额定电压恒定不变,这时调节无功只能是通过改变励磁电流来调节E0。如果电网出现电压降落的现象,说明网上无功负荷出现了突增,输出无功不足,电网的自行调节功能通过降低电压将无功维持在一个新的平衡点上,这时就需要增加励磁来改变电动势E0从而增加无功的输出来替代电网自行调节增加的电网无功,从而使电压回到额定值[3]。
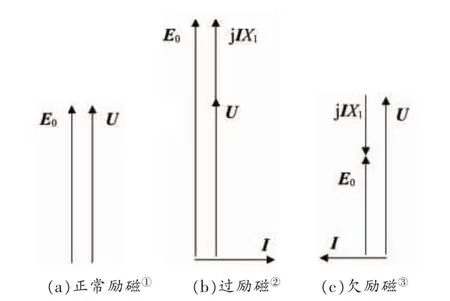
图2 调相机的运行模式
2 调相机的控制功能
调相机的无功调节过程分次暂态过程、暂态过程、稳态过程。每个过程对系统电压的响应速度和无功输出量都有所不同,每个阶段也有其相应作用。
次暂态过程(阶段1)如图3所示。调相机本体的阻尼特性,在励磁系统强励功能未启动时即发挥作用,在系统电压波动后几十到上百毫秒内,即能提供接近额定无功支持。调相机次暂态电抗Xd越小,提供的次暂态无功功率越大,但由于调相机动稳和热稳的要求,Xd不能过小。该过程与调相机自身特性相关,励磁控制系统无法实现调节。主要用于快速实现系统电压支撑,降低受端站换相失败的概率,加快故障后交流电压恢复速度。
暂态过程(阶段2)如图4所示。系统电压波动后1 s内励磁系统强励功能发挥作用,励磁电流达到强励最大值或低励最小值,与交流系统进行大量的无功交换。一般强励时的励磁电流是额定励磁电流的2.5倍,通过提高励磁强励倍数,能提高无功输出快速性。同时通过减少Td的设计值,提高无功输出快速性。该过程可通过励磁系统的控制功能实现,通过改变励磁电压来调节励磁电流从而改变动态无功的输出值,与过程1配合实现系统电压的支撑,降低受端站换相失败的概率,加快故障后交流电压恢复速度。
图3 调相机次暂态过程波形
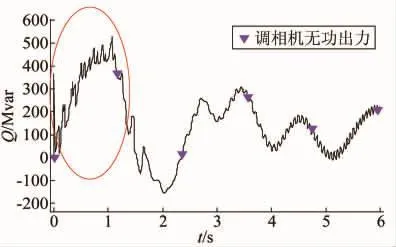
图4 调相机暂态过程波形
稳态过程(阶段3)如图5所示。稳态过程可稳定输出300 Mvar额定无功,稳定吸收-150 Mvar无功,送端电网具备深度进相能力,长期运行可稳定吸收200 Mvar无功功率。该过程可通过励磁系统的控制功能实现,改变系统电压或无功功率参考值即可改变稳态无功输出值。
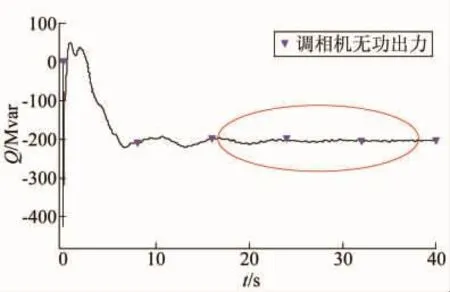
图5 调相机稳态过程波形
针对阶段2和阶段3的无功调节对励磁控制功能策略介绍。
2.1 调相机励磁控制策略
调相机励磁控制系统采用 “快速电压环+慢速无功环”相结合的控制策略,两者的联合控制构成了调相机正常运行时的主要控制方式如图6~8所示。
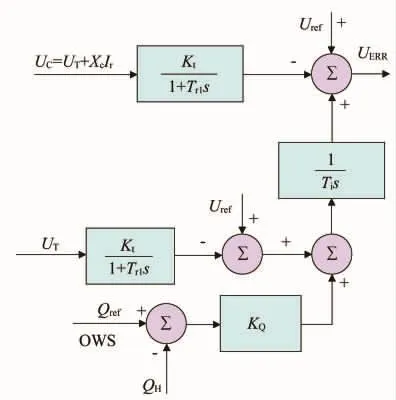
图6 就地控制
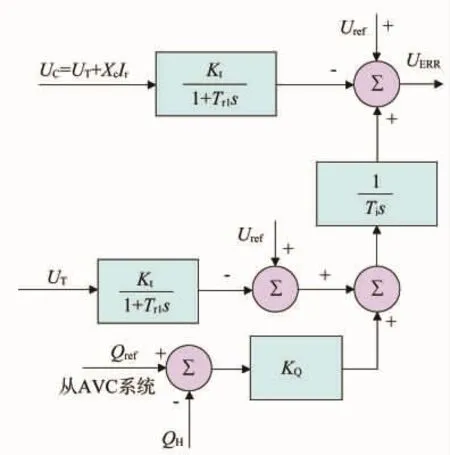
图7 AVC开环控制

图8 AVC闭环控制
1)快速电压环,最基本的励磁控制方式,是励磁运行的主要控制方式。特点是以调相机端电压作为调节变量,调节方式采用串联PID模式,目的为维持机端电压与电压参考值一致,实现在故障情况下快速输出调相机动态无功的目的。快速电压环主要用于过程2交流系统电压波动后15 s内的强励功能。
2)慢速无功环,采集调相机组无功出力作为无功环控制目标,实现稳态时调相机无功输出在指定范围内,以确保调相机具备足够的动态无功储备。例如在直流侧系统稳态运行时,如果调相机无功出力额定300 Mvar,则当出现短时系统电压跌落情况下,此时调相机已无储备无功出力;在直流侧系统稳态运行时,如果调相机进相运行在-150 Mvar,则当出现短时系统电压抬升情况下,调相机吸收无功能力不足。因此如果无法控制稳态时无功出力,则调相机会失去对系统电压的支撑作用。无功环存在的意义在于系统电压稳定情况下,保证调相机无功输出在指定值,不至于过大影响动态无功输出或过小影响动态无功吸收。慢速无功环主要用于过程3与交流系统稳态无功的交换。
无功环采用“就地控制”和“AVC主站控制”两种模式。
就地控制时,运行人员需要在DCS的OWS页面设置无功参考值,调相机控制系统将根据无功参考值和系统电压偏离系统电压参考值的大小确定调相机稳态无功输出。就地控制如图6所示。
AVC主站控制时,调相机的DCS将从AVC主站获取无功参考值,此时又有两种控制模式,AVC闭环控制和AVC开环控制。当采用AVC闭环控制时,调相机励磁系统将直接进行增减磁操作,保证调相机无功出力与AVC指令值一致。当采用AVC开环控制时,则仅从AVC主站获取无功参考值,调相机控制系统根据无功参考值和系统电压偏离系统电压参考值的大小确定调相机稳态无功输出。AVC主站控制如图7、图8所示。
3)PSVR系统电压调节,为机端电压环的附加控制,以网侧高压母线电压为调节目标,在电网侧电压发生变化时,励磁系统可以快速进行调节,维持电网侧电压在较高水平,不仅提高发电机输出的无功功率极限,也提高了系统电压的稳定性。该功能为选投功能,需要人为选择投入退出。该功能与无功环作用相似,但主要目的是快速实现交流系统电压的支撑。PSVR系统电压调节如图9所示。
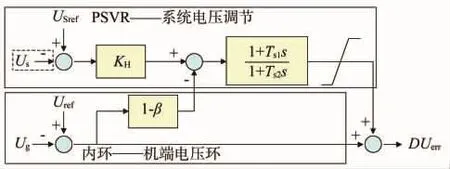
图9 PSVR系统电压调节
2.2 调相机控制功能应用
快速实现交流系统电压支撑,降低受端站换相失败概率。当逆变器两个阀进行换相时,因换相过程未能进行完毕,或者预计关断的阀关断后,在反向电压期间未能恢复阻断能力,当加在该阀上的电压为正时,立即重新导通,则发生了倒换相,使预计开通的阀重新关断,这种现象称为换相失败。换相失败是逆变器常见的故障,逆变器多种故障如阀短路、丢失触发脉冲、交流系统故障等等均会引起换相失败。计算和实测表明,单一直流换相失败,逆变侧从系统吸收400万~500万kvar的无功。若多回直流同时换相失败,将从系统吸收大量无功,带来巨大无功冲击,甚至导致区域性电压凹陷,引发电压稳定破坏。
系统薄弱的交流电网短路容量降低,电压的稳定性水平降低,电压波动频繁,从而直接增加了接入其中的逆变站换相失败的概率。调相机接入交流电网后,通过自身的次暂态功能和快速强励功能能够快速实现系统电压的抬升,从而直接降低了因交流电压波动带来的换相失败概率。如图10试验波形是交流母线电压发生0.5 pu电压跌落情况下,接入调相机和未接调相机时系统电压的变化情况。由波形图可以看出,发生交流电压跌落0.5 pu情况下,调相机最大输出无功约200 Mvar,支撑交流电压跌落减少8%。
维持交流电压水平,加快故障后交流电压恢复速度。直流系统故障单极闭锁或双极闭锁时,由于交流滤波器组和电容器组无法立即切除会产生瞬间的过电压现象。此时调相机的进相运行吸收大量无功功率,抑制交流母线过电压水平。当交流系统故障引发电压大幅度跌落时,调相机启动强励功能,提供3倍的无功支撑,能有效抑制电压的降落。如图11试验波形是1.0 pu直流双极闭锁情况下调相机的出力情况和系统电压的抬升情况。由波形图可以看出调相机瞬间吸收最大无功300 Mvar,交流系统电压抬升减少15 kV,有效地抑制电压波动,提高了系统电压恢复速度。
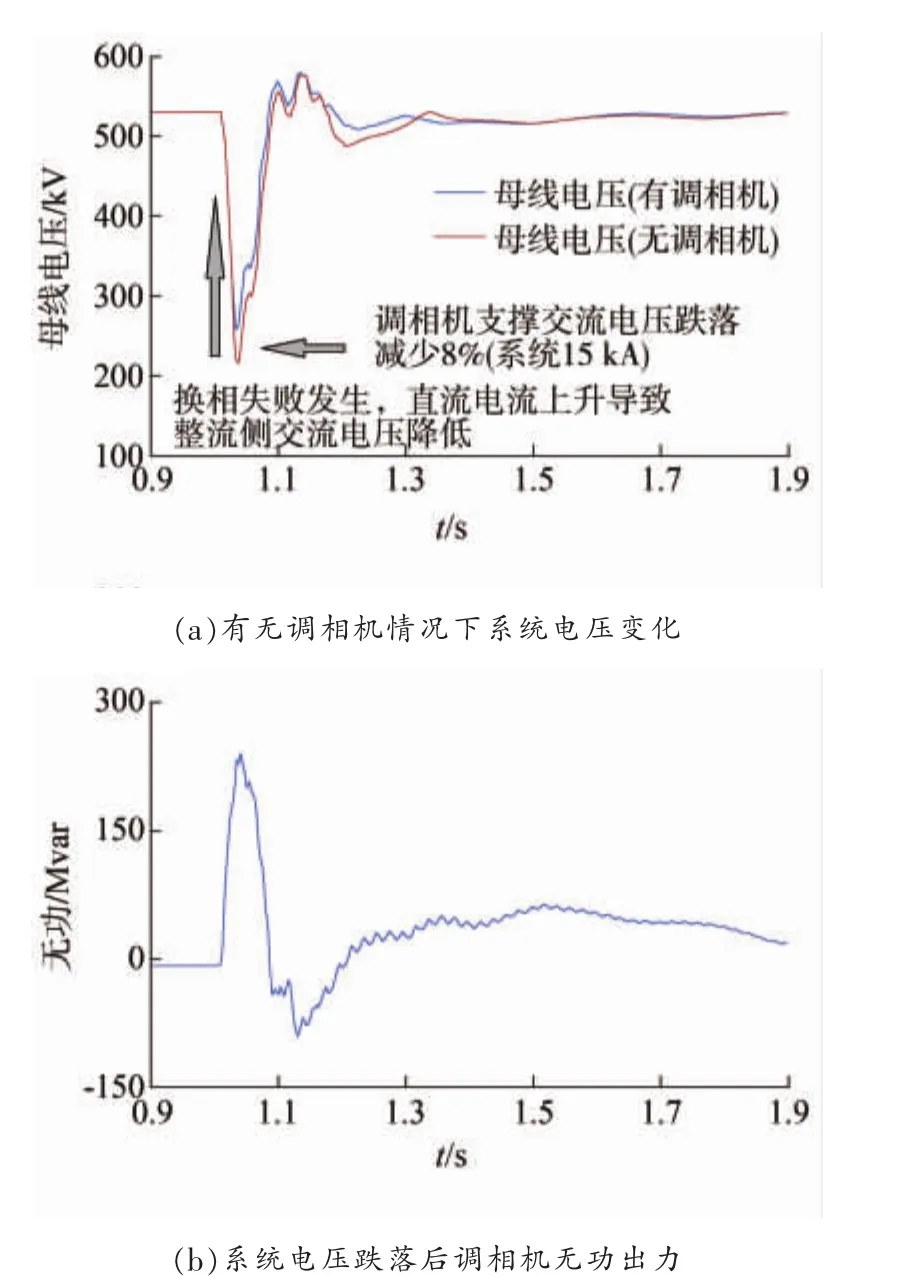
图10 受端换相失败交流母线电压变化
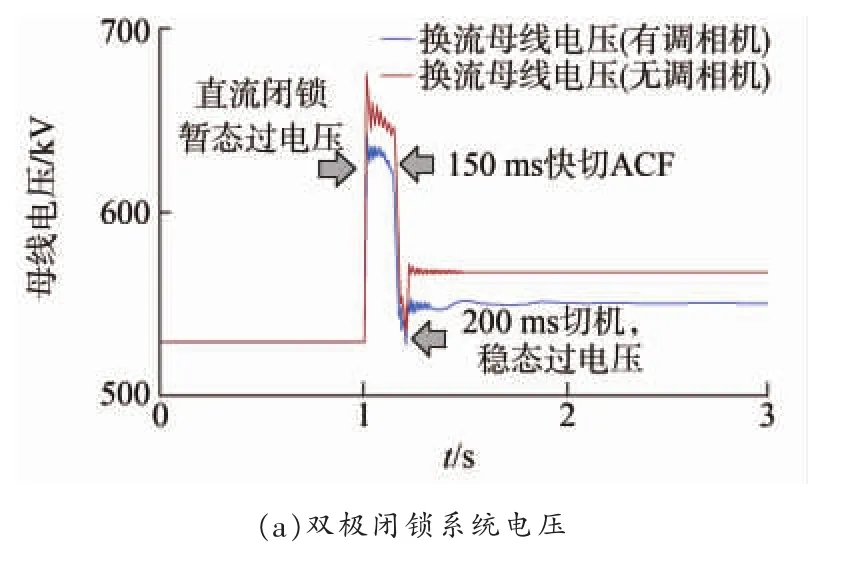
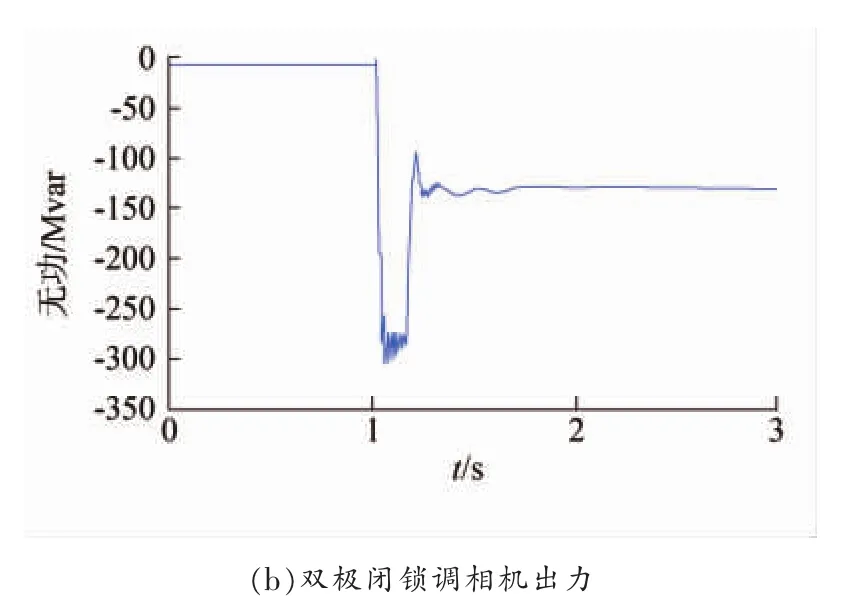
图11 双极闭锁后母线电压及调相机动作情况
3 结语
目前研究及试验表明调相机在无功调节和电压支撑发面有其优越性,但相比于现有的无功调节方法也存在其自身缺陷:增加短路电流,故障时调相机将向系统输出短路电流,因此调相机不适用于强电网系统;旋转设备运维相对复杂,运行维护量大,且功率损耗较大;调相机调节速度相对较慢,从开始到发出最大无功需1~2 s。因此在实际应用中,各种无功调节方法配合来实现无功调节和系统电压支撑显得尤为重要。