电动汽车主动悬架控制系统设计与仿真
2019-04-10宋森楠
宋森楠
(宁波工程学院机械工程学院,浙江宁波 315211)
0 引言
由于电动汽车使用清洁能源,可有效改善因汽车尾气排放带来的环境污染,因此使用越来越广泛,近年来其市场投放量越来越大,发展势头良好[1]。但是,与传统内燃机汽车不同的是,电动汽车动力电池组易受到外界因素干扰,车身平顺性将对电池组的使用寿命和安全性产生重大影响[2]。GB/T 31486-2015规定,动力电池组在振动试验当中,不能产生电流的锐变或者电压异常,不出现外壳破损,无电解液的泄漏,结构完整无缺[3]。
目前,大多数电动汽车仍然采用被动悬架,其对汽车平顺性的优化效果有限,无法根据不同路况做出调整;而主动悬架可以根据各路况改变其悬架刚度和阻尼系数,使汽车在任何条件下都能获得最好的平顺性[4-5]。
主动悬架的控制算法包括自适应控制、PID控制、模糊控制、神经网络控制等,其中模糊控制具备良好的鲁棒性和控制精度,同时不需要精确的数学模型,能处理参数不确定的问题[6-7],因此本文作者选择模糊控制理论,以MATLAB/Simulink为平台,建立1/2车辆模型[8],获得模糊控制下的车辆振动曲线。
1 1/2车辆模型
汽车的每个轮胎分别与车身通过悬架连接。1/2车辆模型包含左右2个车轮及其悬架,因此具备4个自由度,分别为:2个车轮的独立跳动,车身的垂向运动以及车身俯仰运动。由车身、悬架以及车轮组成的四自由度振动模型如图1所示。

图1 1/2车辆振动模型
主动悬架相对于被动悬架的不同之处在于,在传统弹簧和减振器之外,附加了一个作用力产生装置,可通过传感器接收车身振动情况,通过控制器控制力发生器,为悬架增加可变作用力F,使悬架能随时根据不同路况来调整作用力,使车身始终获得良好的平顺性。结合车辆振动模型以及牛顿第二定律得到如下微分方程:
(1)
(2)
F1-F2
(3)
(4)
式中:mi为单个车轮承载的簧载质量;wi为车身垂向运动位移;si为车轮垂向运动位移;qi为路面激励位移;Ix为俯仰运动转动惯量;δ为电动汽车俯仰角;mb为总簧载质量;xb为车身垂向运动位移;a、b分别为前后悬架与车身连接点到汽车重心的距离;mwi为单个车轮非簧载质量;ki为悬架刚度;ci为阻尼系数;kwi为轮胎刚度。
表1为电动汽车悬架参数。

表1 电动汽车悬架参数
2 模糊控制
模糊控制理论在20世纪60年代首次被提出,它可以模仿人脑当中的模糊概念,运用模糊数学,能够精确地描述复杂的系统,并且对其做出正确的判断和控制。由于模糊控制具备适用性广、鲁棒性强等优点,目前已经广泛运用在工业控制领域。
模糊控制器一般有以下控制步骤[9-10]:
(1)模糊化;
(2) 规则库;
(3) 模糊推理;
(4) 解模糊。
所以,文中采用目前广泛使用的单变量二维模糊控制器,并选取悬挂质量的速度作为误差信号E,悬挂质量的加速度作为误差变化EC,作动器的输出力作为输出变量。
将误差E、误差变化EC看作两个输入变量,将控制量看作输出变量U,建成一个二维的模糊控制器,3个变量采用5个模糊子集来表示它们的模糊状态:{负大,负小,零,正小,正大},也可以表示成:{NB,NS,ZE,PS,PB}。3个变量的论域为:{-2,-1,0,1,2}。
3个变量的对应关系如表2所示。

表2 模糊控制规则
到此为止,模糊控制器构建完成。
3 建立仿真模型
文中以MATLAB/Simulink作为仿真平台,首先建立模糊控制器仿真模型,如图2所示。
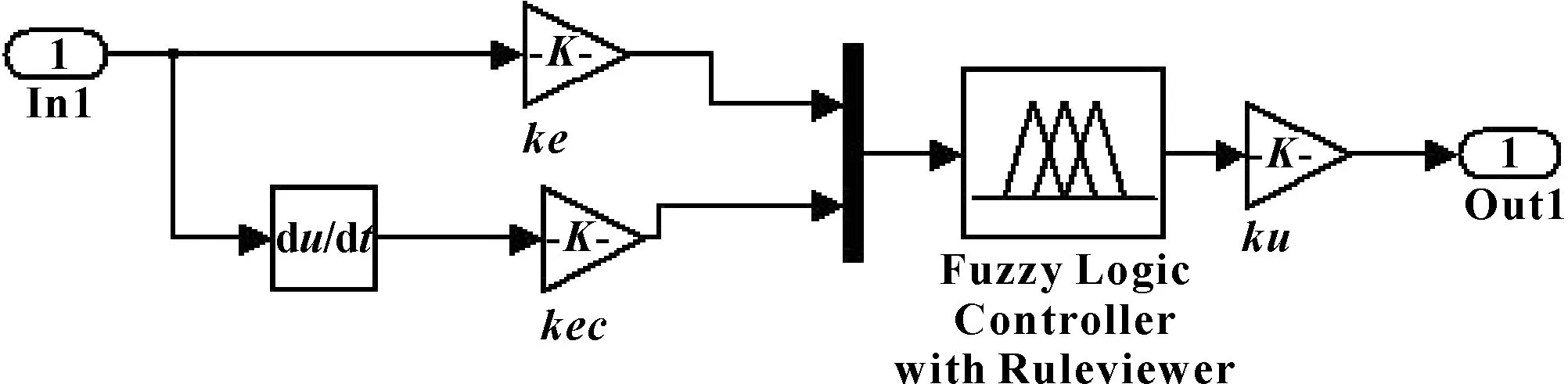
图2 模糊控制器仿真模型
将表2所示的模糊控制规则输入到Fuzzy Logic Controller模块中,得到如图3所示的模糊输入输出规则曲面。
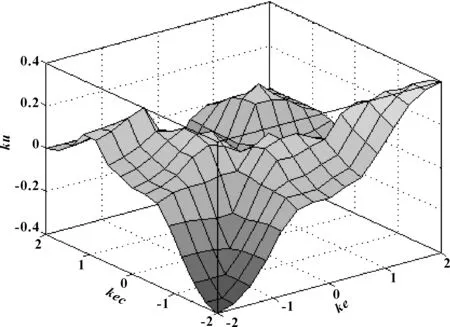
图3 输入输出规则曲面
文中以Simulink自带的白噪声速度谱作为路面垂向激励,根据式(1)—式(4)代表的数学模型在Simulink建立1/4车辆振动模型,如图4所示。

图4 1/4车辆振动模型
同时,将模糊控制器仿真模型代入到振动模型当中,即完成Simulink仿真模型的建立。
4 仿真结果分析
将第1节中的电动汽车悬架参数代入到第3节建立的Simulink模型,分别得到模糊控制下的车辆垂向振动加速度和俯仰加速度的时域变化规律,并将其与被动悬架的仿真结果进行对比,如图5—图6所示。
对仿真得到的两组数据分别计算其均方根值,并进行对比,其结果如表3所示。

图5 模糊控制主动悬架与被动悬架垂向加速度对比
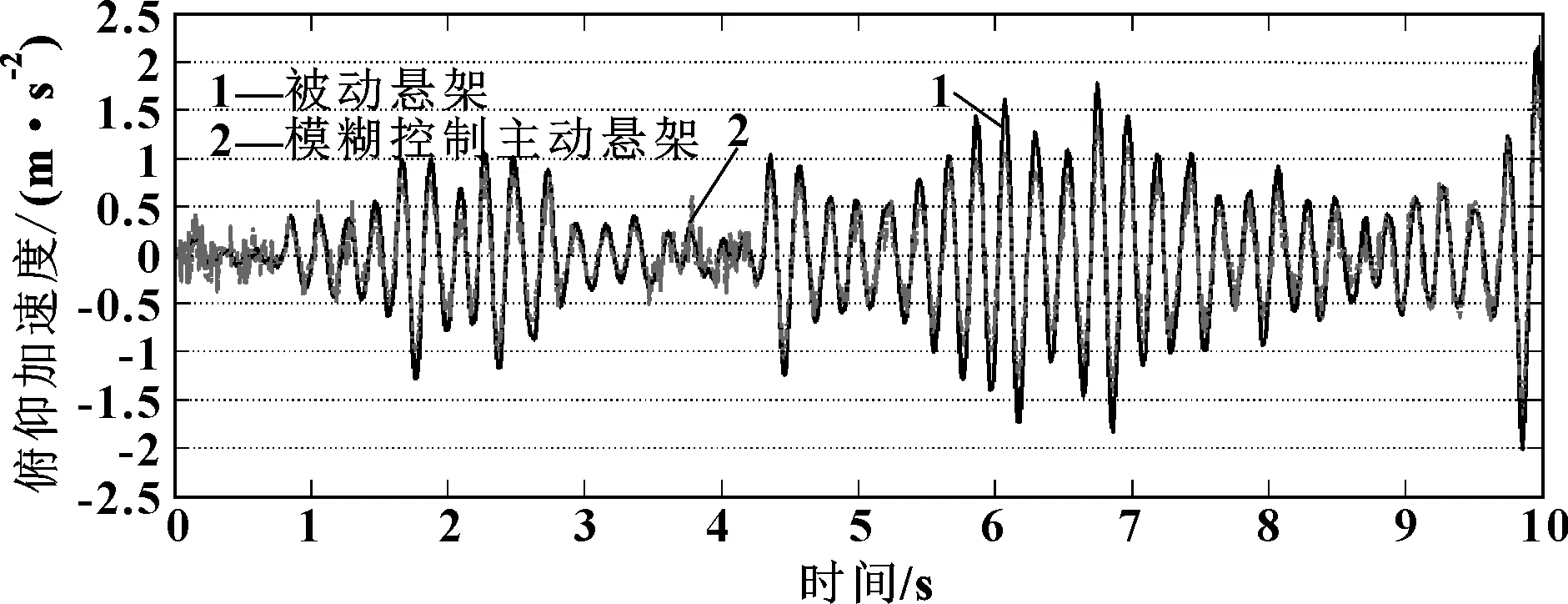
图6 模糊控制主动悬架与被动悬架俯仰加速度对比
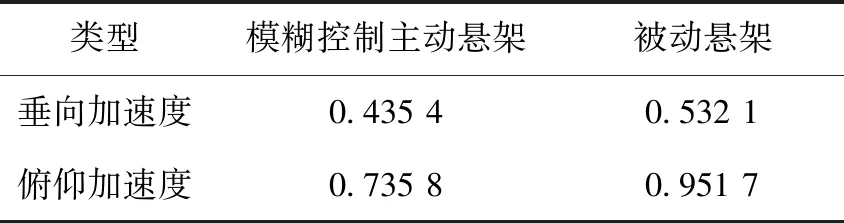
类型模糊控制主动悬架被动悬架垂向加速度0.435 40.532 1俯仰加速度0.735 80.951 7
可以看出,模糊控制主动悬架的垂向加速度均方根值比被动悬架降低了22.2%,模糊控制主动悬架的俯仰加速度均方根值比被动悬架降低了约29.3%。
5 总结
使用模糊控制主动悬架,从俯仰加速度和垂向加速度两项数据来看,模糊控制主动悬架均取得了良好的优化效果,大大优化了汽车的平顺性能。对电动汽车来说,使用模糊控制主动悬架可以降低动力电池组的振动加速度和振动幅度,继而增加电池组寿命,提高电池工作稳定性,预防电解液泄漏和壳体破损。因此不仅能提高汽车的行驶平顺性,也能提高电池可靠性。
